四象限光电探测器用于表面形貌测量的研究
四象限光电探测器用于二维小角度测量的研究
Q ’R E ~w | NR y x L { y L x NF G zS E J Sw x N { E R E Q G Wv S E Rw F w N xJ E & N RQ L yFG N "| ! ~N y S Q z’ Q xy S NR y L z !Q ’R ~F | |F G J | N
四 象 限 光 电 探 测 器用 于 二 维 小 角 度 测 量 的 研 究
钱 建强
惠
梅
北京
王 东生
清华大学精密仪器与机械学系 !
" # # # $ % &
摘要
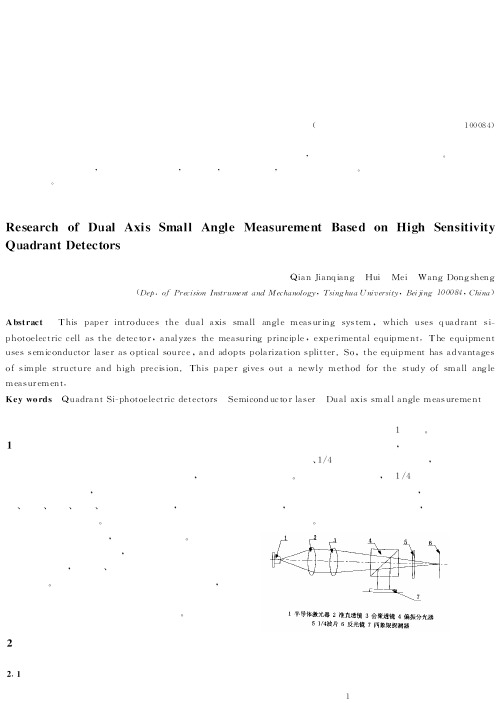
介绍了利用高灵敏度四象限硅光电管作为探测器的二维小角度测 量系统 ’ 详细 分析了其测试原理 及实验装置 ( 测试系统 利 用半导体激光器做光源 ’ 采用了偏振分光器件 ’ 结构小巧 ’ 能量利用率高 ’ 具有较高的测量精度 (为小角度测试技术的研究 提出了一 种新的方法 ( 关键词 四象限硅光电探测器 半导体激光器 二维小角度测量
$ % 3( ) ( ( , + 0
$ & 3( ) ( 0 (
> $ F D ’ D ; : < H; $ C 9 H : I = $ > : H> = ’ G D C $ B $ ; ’ < E < J &K @ L M N 9 & > M O P 卡尔曼滤波方法 在圆度误差评价中 的应用 M 计量 学 + 顾启泰 M 报6 . ( 6 S + T P . + 2 U. + M 最大范数最小法 在圆度误差评价中 的应用 M 数理 统 / 夏新涛 M 计与管理 6 . / 6 S . T P . U+ / M 曲廷敏 M 谐波分析与圆度评 价的误区及其最新研 究 2 夏新涛 6 对策 M 数学的实践与认识 6 . * 6 S . T P + ( U+ 2 M
漫谈化工材料研究用的显微镜—SEM、TEM、AFM、STM

漫谈化工材料研究用的显微镜—SEM、TEM、AFM、STM陈老师(哲博检测,浙大国家大学科技园,Emal: ceshi@)化工材料的检测常常用到各种显微镜,如SEM、TEM、AFM、STM。
它们作用相近,却各有特点,灵活运用才能为材料的检测作出最大的贡献。
本文以散文形式漫谈了几种显微镜的原理、用途。
SEM:利用二次电子成像,表面5-10 nm的表层形貌像,最高分辨率目前是0.4 nm TEM:利用透射电子成像,样品的结构,形貌,同时可以观察倒易空间衍射花样,对于物质结构的解释有直观的优势。
并通过倾转得到的系列衍射花样,推知未知晶体结构。
最高分辨率0.5 A。
STM:利用隧穿电流的变化,得到样品表面原子级分辨像。
光学显微镜、TEM、SEM成像原理比较HRTEM和STM有本质区别的STM是表面局域电子态,和内部结构并无大关系TEM是晶格整体对电子的衍射,实际样品都有一定厚,高阶衍射和多次衍射束都有影响,样品厚度过大的话(几十个nm)就很难得到高分辨像了。
另外,样品的晶轴转向也很有讲究,否则得到的高分辨像实际是一定角度的投影,晶格常数就不匹配了。
我们这里在F30上一般不做diffraction pattern,因为有损坏CCD的危险。
拍出高分辨来做FFT就可以了。
比如,TEM观察主要是针对生物材料的内部超微结构;SEM和AFM观察是针对生物材料的表面形貌。
但是,SEM的景深比AFM的大,所以图像的立体效果好,但是对于纳米级的结构分辨不好(这个有时也要看仪器性能),而AFM的景深小,图像的立体感和反差不如SEM,但是对于纳米级的结构解析度好。
此外,AFM的制样简单,但观察比较费时间。
你做的是纳米材料,具体用哪个技术还需要你自己根据研究的内容来决定。
我仅是从生物材料的角度来分析这几种技术,回答的并不全面,还望有更多的朋友来帮你。
权此在这里抛砖引玉吧。
SEM扫描电镜可以观察物体的表面形貌,也可用于做成分的定性和半定量分析TEM透射电镜样品需要做成薄片,可用于观察内部显微结构,也可用于选区电子衍射等,也可用于成分分析,而且TEM的倍数要比SEM大得多,TEM很多用于观察纳米级别的试样STM 扫描隧道显微镜原子级,高分辨similar with AFM原子力显微镜(AFM )的原理是利用针尖与样品表面原子间的微弱作用力来作为反馈信号,维持针尖——样品间作用力恒定,同时针尖在样品表面扫描,从而得知样品表面的高低起伏。
表面粗糙度测量方法综述
维普资讯
第 5 期
刘 斌 等 : 表面 粗糙 度测 量方 法综 述
·5 7·
器 , 束经光 电转换后 再放大和计 算 , 光 可获得 与被测表 面微 小变位量 相对应 的输 出信号 , 这种方法 分辨 力
可 达到纳米级 别 , 但测量范 围较 小 .
ds cs d iu s e .So e ie sa o ti' r n r ie n t ee d. m d a b u t S te d a e g v n i h n
Ke r s:u f c o g n s y wo d s ra e r u h e s;c n a tm e u e e t o c n a tm e s r m e t o t c - s r m n ;n n o t c — a u e n
精 密表面如光盘 , 磁盘检测领域 , 针式仪器 的实用受到限制 , 出 了高精 度 , 触 提 非接触测 量的要求 .
3 非接触 式测量
c
: I 高 ]
十
维普资讯
·
5 6·
光
学
仪
器
第2 6卷
光源具有 良好 的空间与时 间相干性 的条件 时得 出的对 比度与表面粗糙度的关 系式 . 实际应用 中, 在表面粗
维普资讯
第 5期
刘 斌 等 : 表 面 粗糙度 测 量方 法 综述
·5 5·
2 1 比较 法 .
比较法 是车间常用 的方 法 .将被 测表面对照粗糙度样板 , 用手摸 靠感觉来 判断被加工表面 的粗 糙度 ; 也可 用 肉眼或借助于放 大镜 , 比较显微 镜 比较 .比较法一般 只用 于粗 糙度评 定参数值较大 的情况下 , 且 而
四象限红外探测器光电参数测试技术研究

文章编号:100525630(2007)0120007205四象限红外探测器光电参数测试技术研究Ξ徐小 ,陈海清,齐哲明(华中科技大学光电子工程系,湖北武汉430074) 摘要:针对四象限红外探测器的特点,设计了基于双光路替换法的光学系统。
该系统可测试探测器的脉冲响应灵敏度、光电响应均匀度以及相邻象元之间的串扰并可以有效地避免光源输出功率波动和光学分光器件分光比的测量不确定度等因素带来的误差,在相同的硬件条件下可实现更高的测量精度。
实验结果证明:该测量系统具有较低的测量误差(≤5%),并且结构简单紧凑,可适用于对光源要求较高的检测系统进行实时检测。
关键词:四象限红外探测器;双光路替换法;响应灵敏度;响应均匀度;串扰中图分类号:TN 215 文献标识码:AStudy on photo -electron i c param eters m ea sure m en t syste m of four quadran t i n frared detectorX U X iao 2y ao ,CH EN H ai 2qing ,Q I Z hen 2m ing(D epartm en t of Op to 2electron ic Engineering ,H uazhong U n iversity of Science and T echno l ogy ,W uhan 430074,Ch ina ) Abstract :A n op tical syste m is designed ,w h ich is based on the p rinci p le of double op tical path s and acco rding to the characteristics of four quadran t infrared detecto r .T he m easure m en t syste m m ain ly ach ievesthe para m eters bel ow :res pon sibility ,homogeneity and co 2disturbance.T he syste m can effectively reduce the erro rs caused by the turbulence of the laser outcom e and the uncertain ties of op tical divisi on ,and ach ievesh igher m easure m en t accuracy under the sa m e circum stances .T he result show s th is compact ,si m p lifiedop tical syste m can be used in m any detective syste m s having h igh require m en t of op tical res ources.T he m easure m en t erro r is no t h igher than 5%.Key words :four quadran t infrared detecto r ;double op tical path 2rep lace m en t m ethod ;res pon sibility ;homogeneity ;co 2disturbance1 引 言红外探测器技术是红外科技领域中重要组成部分。
四象探测器的原理和应用
四象探测器的原理和应用一、什么是四象探测器四象探测器是一种用于检测和测量物体表面的工具,它基于电流和电压的测量原理,通过测量四个象限的电流和电压,来确定物体表面的性质和特征。
四象探测器常用于材料科学、电子元器件测试和电子显微术等领域。
二、四象探测器的工作原理四象探测器的核心部件是一个由四个电极组成的电流引出器,通常被固定在一个传感器的底座上。
这四个电极分布在一个平面上,并形成一个正方形或矩形的布局。
当将四象探测器放置在被测试物体的表面时,它会与物体表面接触,进而测量和检测物体。
四象探测器通过测量在电流和电压之间的关系来确定物体的性质。
当施加电压到探测器上时,四个电极会产生不同的电流,这些电流与物体表面的性质有关。
通过测量四个电极上的电流和电压,可以推导出物体表面的导电性、电阻率、电感等相关参数。
三、四象探测器的应用领域四象探测器在材料科学、电子元器件测试和电子显微术等领域有广泛的应用。
以下是四象探测器的几个主要应用领域:1. 材料科学研究四象探测器能够在非接触和微观尺度上测量材料的电学性质,如导电性、电阻率等。
这对于研究材料的结构和性质具有重要意义,可以帮助科学家深入了解材料的电子结构和性能。
2. 电子元器件测试在电子元器件制造过程中,四象探测器可以用于测试和验证电子元器件的性能和可靠性。
通过测量元器件表面的电流和电压,可以检测出可能存在的故障或缺陷,并进行精确的定位和修复。
3. 电子显微术在电子显微术中,四象探测器可用于分析材料表面的形貌和物理性质。
通过测量电流和电压的变化,可以获取有关样本的更详细信息,如表面形貌、粗糙度、导电性等。
4. 功能薄膜的研究功能薄膜是一种具有特殊性能的薄膜材料,如透明导电膜、光学薄膜等。
四象探测器可以用于测试功能薄膜的性能参数,并优化薄膜的制备工艺和应用。
四、四象探测器的优势和局限性四象探测器作为一种表面测试和测量工具,具有以下优势:•高精度:四象探测器能够实现微米级的测量精度,对于微小尺度的物体表面特征和性质的测量具有较高的精确度。
AFM
Tapping Mode(半接触式)
---- Phase Imaging(相位成像) • Lignin component appears bright in phase image • Phase image highlights cellulose microfibrils
Height
3µ scan m
30µ scan m
Contact Mode(接触式)
----LFM(横向力显微镜)
Contact Mode(接触式)
----LFM(横向力显微镜)
AFM工作模式
----NonContact Mode(非接触式)
在非接触模式中,针尖在样品表面的上方振动,始终不与 样品接触,探测器检测的是范德华作用力和静电力等对成像 样品没有破坏的长程作用力。 当针尖和样品之间的距离较长时,分辨率要比接触模式和 轻敲模式都低。这种模式的操作相对较难,通常不适用于在 液体中成像,在生物中的应用也很少。
NonContact Mode(非接触式)
----EFM(电场力显微镜)
电场力模式下的饱和三极管图像
NonContact Mode(非接触式)
----MFM(磁场力显微镜)
NonContact Mode(非接触式)
----MFM(磁场力显微镜)
High frequency data tracks overwritten with low frequency periodic signal
名 称
STM
AFM MFM
基本 原 理
工 作环 境
分 辨 率
1Å 0.1Å
~ 1Å ~ 10 nm nm级 数十 nm 100nm nm 数百
(横向) (纵向)
光电定向实验报告

光电定向实验李康华(哈尔滨工业大学威海校区光电科学系,威海264209)摘要:采用四象限探测器作为光电定向实验,学习四象限探测器的工作原理和特性,同时掌握四象限探测器定向的工作方法。
实验中,四象限探测器的四个限区验证了具有完全一样的光学特性,同时四象限的定向具有较良好的线性关系。
关键词:光电定向四象限探测器1、引言随着光电技术的发展,光电探测的应用也越来越广泛,其中光电定向作为光电子检测技术的重要组成部分,是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。
光电定向方式有扫描式、调制盘式和四象限式,前两种用于连续信号工作方式,后一种用于脉冲信号工作方式。
,由于四象限光电探测器能够探测光斑中心在四象限工作平面的位置,因此在激光准直、激光通信、激光制导等领域得到了广泛的应用[1]. 本光电定向实验装置采用激光器作为光源,四象限探测器作为光电探测接收器,采用目前应用最广泛的一种光电定向方式现直观,快速定位跟踪目标方位。
定向原理由两种方式完成:1、硬件模拟定向,通过模拟电路进行坐标运算,运算结果通过数字表头进行显示,从而显示出定向坐标;2、软件数字定向,通过AD 转换电路对四个象限的输出数据进行采集处理,经过单片机运算处理,将数据送至电脑,由上位机软件实时显示定向结果。
本实验系统是根据光学雷达和光学制导的原理而设计的,利用其光电系统可以直接、间接地测定目标的方向。
采用650nm激光器做光源,用四象限探测器显示光源方向和强度。
通过实验,可以掌握四象限光电探测器原理,并观测到红外可见光辐射到四象限探测器上的位置和强度变化。
并利用实验仪进行设计性实验等内容,将光学定向应用到各领域中[2]。
2、实验原理2.1、系统介绍光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。
四象限InGaAs APD探测器的研究
四象限InGaAs APD探测器的研究王致远;李发明;刘方楠【摘要】文章中设计的四象限InGaAs雪崩光电二极管(Avalanche Photo Diode,APD)的管芯结构采用正入光式平面型结构,而材料结构采用吸收区、倍增区渐变分离的APD结构,在对响应时间、暗电流和响应度等参数进行计算与分析的基础上,优化了器件结构参数.试验结果表明,其响应时间≤1.5 ns,响应度≥9.5 A/W,暗电流≤40 nA,可靠性设计时使PN结和倍增层均在器件表面以下,可有效抑制器件表面漏电流,提高器件的可靠性.【期刊名称】《光通信研究》【年(卷),期】2007(000)006【总页数】4页(P43-46)【关键词】InGaAs雪崩光电二极管;吸收区倍增区渐变分离-雪崩光电二极管;光谱响应范围;响应度;暗电流【作者】王致远;李发明;刘方楠【作者单位】重庆邮电大学,光电工程学院,重庆,400065;重庆邮电大学,光电工程学院,重庆,400065;重庆邮电大学,光电工程学院,重庆,400065【正文语种】中文【中图分类】TN3InGaAs材料制作的探测器具有直接禁带、室温工作和高纯度的优点,由它制作的光电探测器具有极低的暗电流和噪声。
在过去的十多年中,在光纤通信需求的推动下,InGaAs材料和器件有了很大的发展,现在已经能制备出性能非常优良的探测器。
激光导引头、激光经纬仪等光电跟踪、定位和准直仪器中常用四象限探测器作为光电传感器。
激光制导武器的核心器件便是激光导引头,位于导引头最前端的象限光电探测器是捕获目标、判断目标位置、分析目标状态的第一信息的关键部分[1]。
开发In-GaAs四象限探测器已成为激光制导、激光瞄准、探索和跟踪等装备的迫切需求,也是民用大气检测、土壤水分和碳化物等监控所需象限探测器的发展趋势[2]。
1 工作原理及器件参数设计1.1 工作原理四象限探测器的基本工作原理如图1所示。
器件的4 个象限同时工作在反向偏压下,当光照射时,在每个象限耗尽区内,光激发产生的载流子分别向两极运动,电子在运动过程中经过具有高电场的电荷层加速,在倍增层内碰撞产生大量的空穴电子对(雪崩效应),在外电路形成比光激发电流大得多的雪崩电流,实现器件的增益,同时,也将光信号转换成了4 路电流信号,如图1(a)所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
实验结果
PIN 型四象限光电探测器已用于本实验室研
制的激光干涉三维形貌测量仪 [ 3] 。 激光干涉传感 器的原理结构图如图 7 所示。 激光器发出的光经 反射镜到达分光镜后分为两路 , 参考光束 B 经参 考镜反射后沿原路返回, 测量光束 A 经由角锥棱 镜到达反射镜后也由原路返回 , 两路光在分光点
图2 田字形四象限对称布置的干涉条纹坐标系
则两路差分信号为
S
#
纹周期宽度小于等于 1 0m m 或大于等于 4 0mm 时, 幅值的变化不能满足计数要求。 2. 2 条纹宽度 d 、 旋转角度 对光电探测器差分 信号相差的影响
( 7)
= S1 - S2 = A 0
2
d2 [ sin ( - cos 1 co s 2 + sin2
S3 =
!! [ A sin(
0 0 0 a 0 - a 0
+ 2 x ) ] dx∀ dy∀ = d ( 5)
] } dx∀d y∀ !! { A sin [ + d 2 x S = !![ A sin( + d ) ] d x∀dy∀ = 2 ( x∀co s - y ∀sin ) ] } dx∀dy∀ !!{ A sin [ + d
! !
a 0 a 0 a
0 - a
{ A 0 sin [ +
2 ( x∀co s - y ∀sin ) ] } dx∀dy∀ ( 3) d
0
S2 =
! ![ A
a 0 a 0 0 0 - a - a
sin( +
2 x ) ] d x∀dy∀ = d ( 4)
! !
0 0 -a
{ A 0 sin [ + 2 ( x∀co s - y∀sin ) ] } d x∀dy∀ 0 d
0
引言
激光干涉原理广泛应用于精密测量中, 该原
光电探测器的前置放大电路。
理通过处理干涉条纹 的变化来获取 测量位移信 息。在干涉条纹中, 存在着许多随机噪声, 传统光 电管布置方法一般采用邻域平均法消除噪声 。 本文提出了一种 P IN 田字形对称式四象限光电 探测器用于接收激光干涉条纹的空间布置方法。 由于这种布置方法仅由一个四象限光电管完成, 光电管对称性好 , 参数一致, 获取干涉条纹信号集 中, 因而能极大地抑制直流信号, 获取高信噪比的 光电差分信号, 为激光干涉纳米级表面形貌测量 提供了保障。本文利用积分分析法分析了在田字 形四象限光电探测器对称布置、 理想干涉条纹下, 条纹宽度 d 和条纹旋转角度 与光电探测器差分 信号幅值和相差的关系。设计了 P IN 型四象限
-
= 2ar ct an
sin 1 1 - co s
=
1
2
%
2
( 13)
+ 1) + cos ( sin 1 co s 2 - sin 1 ) ] = A0 d2
2
12
在[ 0 , 2 ] 范围内式 ( 13 ) 有二个解 , 11 = 0, = / 2, 当 11 = 0 时, = 0, S 1 - S 2 = S 3 - S 4 ,
中国机械工程第 19 卷第 19 期 2008 年 10 月上半月
表1
d/ a ( rad) 1. 50
满足正交条件的 角
1. 75 2. 00 2. 50 0. 6751 3. 00 0. 8481
端电压分别为
Usin = ( I 1 - I 2 ) R Uco s = ( I 3 - I 4 ) R ( 14)
收稿日期 : 2007 05 30 基金项目 : 国家自然科学基金资助项目 ( 50605018)
[ 1]
1
1. 1
四象限光电探测器空间布置方法
干涉条纹及坐标系 以干涉条纹中心为原点, 对条纹区域建立如
图 1 所示的直角坐标系。假设原点光强为
I ( 0 , 0 ) = A ( 0, 0) sin + C( 0 , 0 ) ( 1)
12
A ∃ sin ( + 2 asin = d 2 acos = d
∃
)
( 8)
两路信号相差为零 , 不满足正交条件, 因此
2 asin = d
=
1
/ 2 是满足正交条件的唯一的解。 由式( 9) 得
( 9) 2
2
A# = A∃ =
#
( 1 - cos 2 )
2 ( 1 - cos 1 ) sin2
0
sin( + 2 x ) ] d x∀dy∀ = d
2 条纹宽度 d 、 旋转角度 对光电探测器 差分信号幅值和相差的影响
2. 1 条纹宽度 d 、 旋转角度 对光电探测器差分 信号幅值的影响 设光电管边长 a = 1. 0mm , 根据式 ( 10 ) , 不 同条纹宽度 d 下 , 差分信号幅值与旋转角度 的 关系如图 3 所示。
-a 4 0 a 0 0 -a
2 ( x∀co s - y∀sin )
( 6)
1. d = 4. 00
2. d = 1. 00 3. d = 3. 00 6. d = 1. 75
4. d = 2. 50
5. d = 2. 00
7. d = 1. 50
图3
d、 和 A I 的关系曲线
由图 3 可知 , 若条纹周期宽度 d 在 2. 0m m 左 右时 , 信号幅值较大 , 且旋转角度 在一定范围变 化时 , 幅值变化小, 信号能满足计数的要求。 当条
那么干涉区域上任一点的光强为
I ( x , y ) = A ( x , y ) sin( + 2 x ) + C( x , y) d ( 2)
其中, 、 d、 A (x, y)、 C( x , y ) 分别 为 光强 原 点相 位、 条纹宽度、 交流幅值、 直流光强。
图1
干涉条纹及坐标系
2348
四象限光电探测器Βιβλιοθήκη 于表面形貌测量的研究王淑珍 谢铁邦
常素萍等
1. 2
四象限布置的面积分分析 为了分析的方便, 假设光电管整体中心位置
则两路信号的相差为
0
=
#
-
∃
= 2
#
= =
2
与干涉条纹中心位置重合。 四象限光电管倾斜一 定的角度 放置在干涉条纹区域内 , 差分信号由 光电管 1、 2 与 3、 4 产生。 如图 2 所示。 已知四个光 电管均为边长 a 的正方形, 条纹宽度为 d, 四象限 相对干涉条纹旋转角度为 , 在理想干涉条纹下, 即无光强噪声、 无直流漂移、 交流幅值 A ( x , y ) = A 0 , 四个光电管接受的光强分别为
0. 3844
0. 4528 0. 5236
设光电管边长 a = 1. 0mm , 根据式( 13) , 在 不同条纹宽度 d 下, 差分信号相差与旋转角度 的关系如图 4 所示。
为了获得较理想的信号, 在后续电路中还必须 对该信号进一步消除直流偏置与放大处理。 图6中 电容 C 主要是消除电路噪声与光强噪声的影响。
1. d = 1. 00 4. d = 2. 00 2. d = 1. 50 3. d = 1. 75 d = 4. 00 5. d = 2. 50
( 10)
即有 sin = d , 所以 d & 4a, 又因为 4a d < 4a。
%
2
, 所以
=-
∃
= arctan
sin 1 cos 2 - sin 1 cos 2 + cos 1 - 1 - cos 1 co s
2
( 11)
在较合适的条纹宽度 d/ a 下 , 满足正交条件 的旋转角度 值如表 1 所示。 2349
中国机械工程第 19 卷第 19 期 2008 年 10 月上半月
四象限光电探测器用于表面形貌测量的研究
王淑珍
1, 2
谢铁邦
1
常素萍
1
王选择
3
1. 华中科技大学, 武汉, 430074 2. 洛阳理工学院, 洛阳, 471023 3. 湖北工业大学, 武汉, 430068
摘要 : 提出了一种 PIN 田字形四象限光电探测器接收激光干涉条纹的空间布置方法 。 利用积分分 析法分析了在理想干涉条纹下 , 条纹宽度 d 和条纹旋转角度 与光电探测器差分信号幅值和相差的关 系, 并给出了满足正交条件的合适的条纹宽度 d 以及对应的条纹旋转角度 。 设计了 PIN 型四象限光电 探测器用于三维表面形貌测量的前置放大电路。 实验应用结果表明, PIN 型四象限光电探测器的差分 信号能满足计数和细分要求, 用于拾取激光干涉条纹能达到纳米级分辨率 , 能满足微纳米表面形貌测量 的要求。 关键词: 四象限光电探测器; 干涉条纹; 前置放大; 表面形貌 中图分类号 : T G84; T N207 文章编号 : 1004 132X( 2008) 19 2348 04
co s 1 + cos
2 - 1) + cos ( sin 1 co s 2 - sin 1 ) ] =
A0
d2
2
A # sin ( +
2
#
)
2
为了得到相位差为 / 2 的两路正弦信号, 根 据式 ( 12) 得
0
S ∃ = S3 - S4 = A 0 co s 1 - cos
2
d 2 [ sin ( co s cos 1 sin2
S1 =
2ar ct an
sin 1 co s 2 - sin 1 cos 2 + co s 1 - 1 - cos 1 cos sin 1 1 - co s %
1
2a rctan