汽车动力学稳定性控制研究进展
汽车稳定性分析及控制策略研究

汽车稳定性控制是汽车主动安全技术体系的重要内容,是促进 汽车行业可持续发展的必然要求,所以深入开展汽车稳定性控制的 研究具有现实价值。
【参考文献】 [1] 王其东,刘伟,陈无畏,等.基于路面识别的汽车稳定系统滑模控制[J].汽车工 程,2018,40(01):82-90+106. [2] 张蕾,李燕飞.低附着路面下汽车紧急制动稳定性控制策略[J].天津职业技术师范大 学学报,2017,27(04):1-5+80. [3] 李洁莹.四轮独立驱动电动汽车稳定性仿真研究[J].机电信息,2014(18):151-152. [4] 欧健,程相川,周鑫华,等.基于汽车稳定性控制系统的侧翻控制策略[J].西南交通大学 学报,2014,49(02):283-290.
汽车稳定性控制(ESP)系统主要由轮速传感器、横向加速度 传感器、方向盘转角传感器、横摆角速度传感器、液压控制系统和 发动机管理电子控制单元EUC组成。控制汽车稳定性的关键是控制 汽车车轮的滑移率,而ESP系统的任务正是如此,即各加速度传感 器协同控制汽车运行的稳定性,具体如下:一是通过检测和计算汽 车方向盘转角的信号,可确定操作人员的操作意图;二是通过分析 处理横摆角速度传感器和横向加速度传感器的信号,可确定汽车在 运行中实时工况的改变,然后再分析对比理想参数与实际参数,若 两者的偏差比设定的偏差大,则表明汽车运行失稳且方向失控。为 此,ESP系统的电子控制单元ECU便会输出一个等值的补偿力矩来 恢复汽车的稳定性,且在必要时,亦可通过调节发动机转速来降低 驱动力,从而实现对汽车稳定性的有效控制[4]。
ห้องสมุดไป่ตู้
1 汽车失稳原因
研究发现,汽车轮胎的非线性区间容易出现失稳现象,且随着 车轮侧偏角的不断增大,其侧向力会逐步进入饱和状态。在饱和状 态下,前轴产生的侧滑会使汽车与操作人员预设的轨迹发生偏移, 而后轴产生的侧滑会使汽车发生甩尾等严重事故。
车辆动力学稳定性控制的控制原理与控制策略研究
卜\、、
图3翻偏角稳定性准则
1£i
——施加VDsc控■
2车辆动力学稳定性控制的控制策略
t释龋足椒
一
根据上面的车辆动力学稳定性控制的控制原 理,提出图4所示的车辆动力学稳定性控制策略。 图4中妒为根据方向盘转角传感器测出的方向盘
。瓜、=加一跏一. 一V一二//”一1
一+
¨目f,。 (吣方向量转角
转角,t,为根据轮速传感器测出的轮速,;为根据侧
^
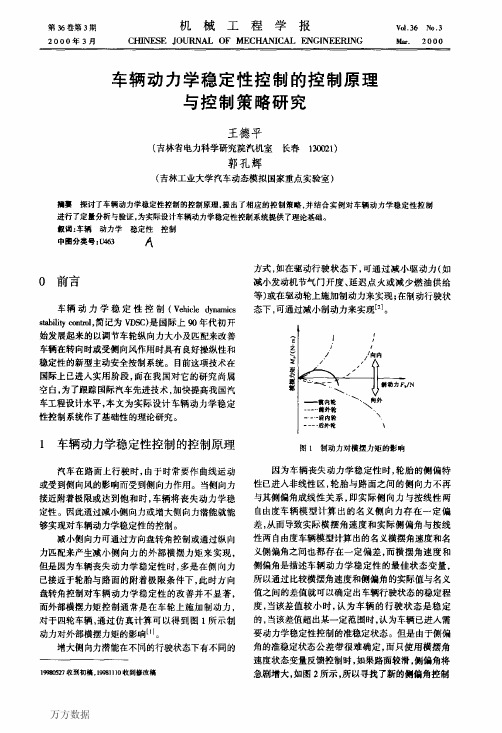
方式,如在驱动行驶状态下。可通过减小驱动力(如
O前言
车辆动力学稳定性控制(vehick dyIl—h
s诅bibty
减小发动机节气门开度、延迟点火或减少燃油供给 等)或在驱动轮上施加制动力来实现;在制动行驶状 态下,可通过减小制动力来实现[“。
o∞岣l,简记为vDsc)是国际上90年代初开
^uh /
1
蓄
、| 一j,jjf
j、弋启
非靛状盎 ‘l
fi
非t窟状毫
一1.O
究。在真实驾驶员操纵下,试验车辆以25 J.】/s的初
始速度在湿土路上作单移线行驶,施加Ⅵ)sc和不
加该控制的试验结果如图5所示。图5a为方向盘 \?:25
o。s
。”“25\
辨。\、’黼
j、
转角曲线,图5b为车辆行驶位移,图5c为发动机节 气门开度曲线,图5d为施加在各个车轮上的制动力 矩曲线。
d删.‰蛐幽0fvDsc
vdlide
dyn衄i艚dabihy
iIl叩m血ly dI曲曲l打i119 a【衄—l搽.Tlle
de蛐VDsc咖.
h州删mld tlle删哪l bI曲is
1畸_瞳凼:V d】曲】e D,n岫i曲吼幽丑畸GⅡl咖1
典型车辆动力学稳定性控制系统及关键技术

论文基于典型 V D SC 介绍车辆动力学稳定性控 制系统的结构及算法实现,并就控制变量的确定及 横摆力矩控制算法研究进展进行了详细分析,最后 总结了 V D SC 实现的关键技术。
1 VDSC 国内外研究进展
自 90 年代初,国际上有影响的几个大汽车公 司一直致力于 V D SC 技术的开发和研究。通常认为 最早提出 V D SC 概念的是 B osch 公司在 1995 年, H onda 公司自 1994 年也进行了直接横摆力矩控制 (D irectY aw C ontrol,D Y C ) 系统方面的研究 。 [2]-[4] 1996 年 B M W 公司和 B osch 公司合作推出了 D SC 3[5]。 目前 B osch 公司和 C ontinental Teves 公司是 V D SC 的主要开发商和供应商。我国对 V D SC 的理论研究 才刚刚起步,程军采用相平面的分析方法分析了车 辆质心侧偏角和横摆角速度的稳定域以及 V D SC 与 A B S 的结合与切换问题,其中 V D SC 控制算法采用
汽车操纵稳定性的研究与评价

汽车操纵稳定性的研究与评价随着汽车工业的不断发展,汽车性能得到了显著提升。
汽车操纵稳定性作为衡量汽车性能的重要指标之一,直接影响着驾驶者的操控感受和行车安全。
因此,对汽车操纵稳定性进行深入研究,提高其评价水平,对于提升汽车产品竞争力具有重要意义。
汽车操纵稳定性研究主要涉及车辆动力学、控制理论、机械系统等多个领域,其目的是在各种行驶条件下,保证汽车具有良好的操控性能和稳定性。
然而,目前汽车操纵稳定性研究仍存在一定的问题,如评价标准不统测试条件不完善等,制约了其发展。
汽车操纵稳定性对于保证驾驶安全具有重要意义。
在行驶过程中,车辆受到外部干扰或自身惯性力的影响,容易导致车身失稳,从而引发交通事故。
良好的汽车操纵稳定性通过有效抑制车身晃动、调整轮胎磨损,为驾驶者提供稳定的操控感,降低交通事故风险。
影响汽车操纵稳定性的因素主要包括以下几个方面:(1)车辆动力学性能:车辆的加速、减速、转弯等动力学性能直接影响驾驶者的操控感受和行车安全。
(2)轮胎性能:轮胎的抓地力、摩擦系数等性能对车辆的操控性和稳定性具有重要影响。
(3)悬挂系统:悬挂系统的设计直接影响车辆的侧倾、振动等特性,从而影响操纵稳定性。
(4)驾驶者的操控技巧:驾驶者的预判、反应速度、操控技巧等直接影响车辆的操纵稳定性。
为提高汽车操纵稳定性,需要采取相应的控制策略。
其中,最重要的是采取主动控制策略,包括:(1)防抱死制动系统(ABS):通过调节制动压力,防止轮胎抱死,提高制动过程中的稳定性。
(2)电子稳定系统(ESP):通过传感器实时监测车辆状态,对过度转向或不足转向进行纠正,保证车辆稳定行驶。
(3)四轮驱动(4WD):通过将驱动力分配到四个轮胎上,提高车辆的加速性能和操控稳定性。
汽车操纵稳定性的评价主要从以下几个方面进行:(1)侧向稳定性:评价车辆在侧向受力情况下的稳定性。
(2)纵向稳定性:评价车辆在纵向受力情况下的稳定性。
(3)横向稳定性:评价车辆在横向受力情况下的稳定性。
车辆稳定性研究报告

车辆稳定性研究报告一、引言随着汽车工业的飞速发展,车辆稳定性对于行车安全的重要性日益凸显。
据统计,我国每年因车辆稳定性问题导致的交通事故数量居高不下,给人民生命财产安全带来严重威胁。
因此,研究车辆稳定性对于预防交通事故、提高行车安全具有重要意义。
本报告以车辆稳定性为研究对象,旨在探讨影响车辆稳定性的因素,分析现有技术的优缺点,并提出改进措施。
本研究问题的提出主要基于以下背景:一方面,车辆稳定性问题涉及多个因素,如车辆结构、驾驶行为、道路条件等,这些因素相互交织,增加了研究难度;另一方面,随着新能源汽车、智能网联汽车的推广,车辆稳定性问题愈发复杂。
因此,有必要对车辆稳定性进行深入研究。
研究目的与假设:1. 分析影响车辆稳定性的主要因素,提出相应的评价指标;2. 对比现有车辆稳定性控制技术的优缺点,探讨技术发展趋势;3. 基于研究结果,提出改进车辆稳定性的措施,并通过实验验证其有效性;4. 假设通过优化车辆稳定性控制策略,可以有效降低交通事故发生率。
研究范围与限制:1. 研究对象为乘用车,不考虑其他类型车辆;2. 研究主要针对车辆在直线行驶和转弯过程中的稳定性问题;3. 本报告所涉及的数据、实验和结论均基于国内实际情况。
本报告将系统、详细地呈现研究过程、发现、分析及结论,以期为提高我国车辆稳定性及行车安全提供参考。
二、文献综述国内外学者在车辆稳定性领域已进行了大量研究,形成了丰富的理论框架和研究成果。
早期研究主要关注车辆动力学模型建立,如阿克曼转向几何原理、车辆侧向力分配等。
随着控制理论的发展,研究者开始探讨车辆稳定性控制策略,如PID控制、滑模控制等。
在理论框架方面,研究者提出了基于车辆动力学模型的稳定性评价指标,如侧向加速度、横摆角速度等。
同时,针对不同行驶工况,如直线行驶、转弯、制动等,研究者也提出了相应的稳定性控制方法。
主要研究发现如下:1. 车辆稳定性受多因素影响,包括车辆结构、驾驶行为、道路条件等;2. 稳定性控制技术能有效提高车辆行驶安全性,降低交通事故发生率;3. 不同的稳定性控制策略具有不同的优缺点,如PID控制简单易实现,但参数调节困难;滑模控制鲁棒性强,但存在抖振问题。
动力学系统的稳定性分析与控制研究

动力学系统的稳定性分析与控制研究第一章:引言动力学系统是研究物体在运动时随时间变化的规律性与特征的学科,具有广泛的应用领域,例如机械工程、物理学、天文学、化学等。
稳定性分析和控制是动力学系统研究的核心问题之一,在实际应用中,对系统的稳定性评估和控制是保持系统正常运转的关键。
第二章:动力学系统的稳定性分析2.1 稳定性的定义在动力学系统分析中,稳定性是指系统在扰动作用下是否会返回到稳态。
一个系统在初始条件下一旦受到微小扰动就无法返回到原来的稳定状态,我们称之为不稳定的;而对于一个系统,即使扰动较大,经过一定时间后它依然能回到它的稳态,我们称之为稳定的。
这里稳定性的评估包含两个方面,一方面是必须对系统本身的稳态进行分析并且评估其稳定性;另一方面是必须对外部扰动的作用进行分析并且确定其影响。
2.2 稳定性分析方法当系统的状态方程知道并且方程是稳定的时,可以使用线性化稳定性分析方法。
采用这种方法,可以将运动方程分解为平衡点附近的微小的偏离,然后对偏离进行稳定分析。
当达到平衡点附近的误差很小时,可以线性化偏离,然后使用矩阵方程计算矩阵特征值的实部和虚部,以此来判断平衡点的稳定性。
当系统的状态方程不稳定时,必须采用非线性分析方法。
由于动力学系统是一个非线性的系统,因此非线性稳定性方法是动力学系统分析中被广泛使用的方法。
在非线性方法中,稳定性分析是通过确定系统动力学方程中的相空间来评估的,这是在测量随时间变化的状态时所描述的空间。
2.3 稳定性稳定性分析的应用动力学系统的稳定性分析应用于各个领域。
在机械领域中,例如底盘和悬挂系统的设计,需要进行稳定性分析以确保车辆能够保持平稳和稳定的行驶。
在化学领域中,稳定性分析常用于研究化学反应的速率和方向性。
在天文学领域中,稳定性分析可以用来研究行星和卫星的轨道特性。
第三章:动力学系统的控制研究3.1 控制原理动力学系统的控制研究是为了保持或改进系统的性能而进行的,例如稳定性、响应速度、精度和鲁棒性等。
汽车动力学稳定性控制系统研究现状及发展趋势

2006年2月农业机械学报第37卷第2期汽车动力学稳定性控制系统研究现状及发展趋势3李 亮 宋 健 祁雪乐 【摘要】 汽车动力学稳定性控制系统(D SC )是汽车主动安全电控系统的重要研究前沿,是继ABS 之后需要进行重点突破的汽车主动安全控制系统。
收集、整理并研究了国内外关于D SC 的研究文献和开发的产品,系统总结了D SC 研究的关键问题:系统建模、控制策略、控制器开发、性能评估等4个方面的研究现状,为D SC 研发提供参考。
关键词:汽车 动力学控制系统 主动横摆力偶矩控制 制动防抱死系统 控制策略 控制器中图分类号:U 463.2文献标识码:AI nvestiga tion and D evelopm en t of Veh icle D ynam icsStab il ity Con trol SystemL i L iang Song J ian Q i Xuele(T sing hua U n iversity )AbstractT he veh icle dynam ics stab ility con tro l (D SC )system is an i m po rtan t advanced research field ,and is also the veh icle active safety con tro l system after AB S w h ich needs to be b roken th rough .B y co llecting ,classificating and studing of the ach ievem en ts on D SC research and its p roducts ,the system m odeling ,con tro l strategy ,the con tro ller developm en t ,p erfo rm ances evaluati on on the D SC w ere summ arized fo r the D SC developm en t .Key words V eh icles ,D ynam ics con tro l system ,A YC ,AB S ,Con tro l strategy ,Con tro ller收稿日期:200410273国家自然科学基金资助项目(项目编号:50575120)李 亮 清华大学汽车安全与节能国家重点实验室 博士生,100084 北京市宋 健 清华大学汽车安全与节能国家重点实验室 教授 博士生导师祁雪乐 清华大学汽车工程系 硕士生 引言汽车动力学稳定性控制系统(D SC )是汽车电控的研究前沿。
《基于线控制动系统的车辆稳定性研究》

《基于线控制动系统的车辆稳定性研究》篇一一、引言随着汽车工业的快速发展,车辆稳定性的研究逐渐成为车辆动力学与控制领域的重要研究方向。
作为汽车控制系统中的关键技术之一,线控制动系统在提高车辆稳定性和驾驶安全性方面起着重要作用。
本文将对基于线控制动系统的车辆稳定性进行深入研究,为提高车辆行驶安全性和稳定性提供理论依据。
二、线控制动系统概述线控制动系统是一种先进的汽车制动技术,通过电子信号替代传统的机械连接,实现对车辆制动系统的精确控制。
该系统主要由传感器、控制器和执行器等部分组成,能够实时监测车辆状态,并根据驾驶员的意图和车辆动力学特性,对制动系统进行精确控制。
线控制动系统具有响应速度快、精度高、可扩展性强等优点,为提高车辆稳定性提供了有力支持。
三、车辆稳定性研究1. 车辆动力学模型为了研究线控制动系统对车辆稳定性的影响,首先需要建立车辆动力学模型。
该模型应包括车辆的纵向、横向和垂向运动,以及轮胎与地面之间的相互作用。
通过建立精确的车辆动力学模型,可以更好地理解线控制动系统对车辆稳定性的作用机制。
2. 线控制动系统对车辆稳定性的影响线控制动系统通过精确控制制动力,实现对车辆行驶状态的实时调整。
在车辆行驶过程中,线控制动系统能够根据车辆的实时状态和驾驶员的意图,对各个车轮的制动力进行独立控制。
这种精确的控制能够使车辆在复杂路况和驾驶条件下保持稳定,从而提高驾驶安全性和舒适性。
四、线控制动系统在提高车辆稳定性方面的应用1. 智能防撞系统线控制动系统可以与智能防撞系统相结合,实现对车辆的主动安全控制。
当系统检测到潜在碰撞风险时,可以通过精确控制制动力,使车辆在保持稳定的前提下进行紧急制动,从而避免碰撞事故的发生。
2. 车辆动态稳定控制系统车辆动态稳定控制系统是线控制动系统在提高车辆稳定性方面的另一重要应用。
该系统能够实时监测车辆的行驶状态,当车辆出现侧滑、甩尾等不稳定情况时,通过精确控制制动力,使车辆恢复稳定状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控 制的要求进一步提 高,为 了减少控制 的滞后性 ,介绍基于预测横摆角速度 的 A Y C控制 策略 ,同时为 了减少汽车在对开路
面上的抖动 ,介绍 防抖振 的 T CS控制技术 。通过不 断的探 索和研究 ,稳定性控制 技术在国 内的产业化也逐步在实现 。 关键词 :汽车 动力 学稳定性控制 建模 状态观 测 控制策略 中图分类号 :U 4 6 9
Pr o g r e s s o n Ve h i c l e Dy n a mi c s S t a b i l i t y Co n t r o l S y s t e m
LI Li a n g J I A Ga n g S ON G J i a n RAN Xu
o f v e h i c l e d na y mi c ss t a b i l i t y c o n t r o l s y s t e m C n a b e c l ss a i ie f d i n t o mo d e l i n g , s t a t e o b s e r v a io t n , c o n t r o l s ra t t e g y nd a i n d u s t r i a l i z a t i o n .
.
T h e mo d e l ng i i n c l u d e s t h e mo d e l ng i i n s i mu l a t i o n a n d he t mo d e l i n g i n c o n ro t 1 .A D A M
第4 9 卷第 2 4期 2 0 1 3年 1 2月
机
械工程ຫໍສະໝຸດ 学报 Vo 1 . 4 9 N O. 24
De c.
J OURNAL 0F M ECHAN I CAL ENGI NEERI NG
2 0 1 3
Do I :1 O . 3 9 0 1 , J M[ E. 2 0 1 3 . 2 4 . 0 9 5
c o n r t o l s y s t e m( T CS ) a n d a c t i v e y a w c o n r t o l ( A Y e) C n a i mp r o v e t h e s t a b i l i y t nd a s a f e y t o f v e h i c l e s i g n i i f c a n t l y . T h e r e s e a r c h p r o re g s s
展可分为动力学 建模 、状态观测 、控 制策略和产业化 四个方面 。其 中动力学建模包括面 向仿真的建模和面 向控制的建模 。面 向仿真 的建模可采用 A DA MS或 C a r s i m 建立仿真模 型,面 向控制 的建模可采用 两轮 或四轮模型 。状态观测主要 需要对动 力
学控制关键参量 如轮 缸压力、路面附着 、轮胎力和 纵横 向车速等进行在线观测 。在 已实现 DS C控制 的基本功 能后 ,对 DS C
r e s e a r c h i s s u e i n v e h i c l e i f e l d f o r a l o n g t i me . T h e DS C s y s t e m w h i c h i s i n t e g r a t e d wi t h nt a i - l o c k b r a k i n g s y s t e m( S S A ) , t r a c t i o n
( S t a t e Ke y L a b o r a t o r y o f Au t o mo t i v e S a f e t y a n d E n e r g y , T s i n g h u a Un i v e r s i t y , B e i j i n g 1 0 0 0 8 4 )
汽车动 力学稳 定性控 制研 究进展冰
李 亮 贾 钢 宋 健 冉 旭
北 京 1 0 0 0 8 4 ) ( 清 华大 学汽 车 安全 与节 能 国家 重 点实验 室
摘要 : 汽车稳 定性控 制系统( D y n a mi c s s t a b i l i t y c o n t r o l s ys t t e m, DS C ) 是汽车主动安全领域 的一 项关 键技术,长期 以来一直是汽 车领域 的研究热 点。 DS C系统集成汽车防抱制动 系统( A n t i . 1 o c k b r a k i n g s y s t e m, A SS ) 、 牵引力控制系 统( T r a c t i o n c o n t o r t s y s t e m, T C S )  ̄及 主动 横摆力偶矩控制系统( Ac t i v e y a m c o n t r o l , A YC ) ,能有 效改善汽车的稳定性和安全性 。汽车稳定性控制技术 的发