两相步进电机单极性细分驱动方法
基于DSP的两相混合式步进电机细分驱动设计
… … … … … … … …
分 控 T S 2F 8 M 02C 3
过 流
要 制
\一 转换 r
L一 A D
、 护 _ ]保
滤波
、_ 放 大 厂1
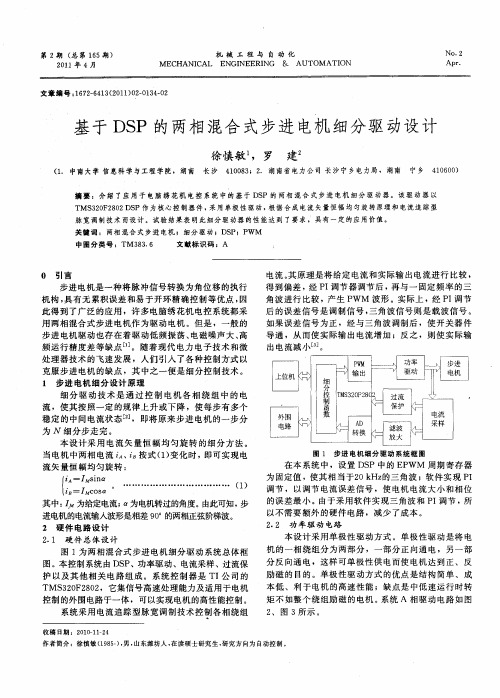
图 1 步 进 电机 细 分 驱 动 系 统框 图
I = 』f i 8 lcos
。
。
() 1
…
其 中: 为给定电流; a为电机转过的角度 。 由此可知 , 步 进电机的电流输入波形是相差 9 。 0 的两相正弦阶梯波。 2 硬 件 电路 设计
第 2期 ( 第 1 5 ) 总 6期
21 0 1年 4月
机 械 工 程 与 自 动 化
M ECHANI CAL ENGI ERI NE NG & AUT0M AT1 0N
No.2
Ap . r
文 章 编 号 :6 26 1 (0 1 0— 140 1 7 —4 3 2 1 )20 3- 2
2 1 硬 件 总 体 设 计 .
Байду номын сангаас
在本 系统 中 ,设 置 DS P中 的 E WM 周 期寄 存器 P 为 固定值 ,使其相 当 于2 Hz 0k 的三角波 ;软件 实现 P I 调节 ,以调节 电流误 差信 号 ,使 电机 电流大 小和 相位 的误 差最 小 。由于采用 软件 实现三 角波 和 P 调节 , I 所 以不 需要 额外 的硬件 电路 ,减少 了成本 。
基于 D P的两相混合 式步进 电机细分驱 动设计 S
徐 慎敏 罗 建 ,
(. 中 南大 学 信 息 科 学 与 T程 学 院 ,湖 南 长 沙 1 4 0 8 ;2 湖 南省 电力 公 司 长 沙 宁 乡 电力 局 , 湖 南 宁 乡 1 03 . 40 0 ) 1 6 0
步进电机的驱动参数设置

步进电机的驱动参数设置1.设置步进驱动器的细分数,通常细分数越高,控制分辨率越高。
但细分数太高则影响到最大进给速度。
一般来说,对于模具机用户可考虑脉冲当量为0.001mm/P(此时最大进给速度为9600mm/min)或者0.0005mm/P(此时最大进给速度为4800mm/min);对于精度要求不高的用户,脉冲当量可设置的大一些,如0.002mm/P(此时最大进给速度为19200mm/min)或0.005mm/P(此时最大进给速度为48000mm/min)。
对于两相步进电机,脉冲当量计算方法如下:脉冲当量=丝杠螺距÷细分数÷200。
2.起跳速度:该参数对应步进电机的起跳频率。
所谓起跳频率是步进电机不经过加速,能够直接启动工作的最高频率。
合理地选取该参数能够提高加工效率,并且能避开步进电机运动特性不好的低速段;但是如果该参数选取大了,就会造成闷车,所以一定要留有余量。
在电机的出厂参数中,一般包含起跳频率参数。
但是在机床装配好后,该值可能发生变化,一般要下降,特别是在做带负载运动时。
所以,该设定参数最好是在参考电机出厂参数后,再实际测量决定。
.单轴加速度:用以描述单个进给轴的加减速能力,单位是毫米/秒平方。
这个指标由机床的物理特性决定,如运动部分的质量、进给电机的扭矩、阻力、切削负载等。
这个值越大,在运动过程中花在加减速过程中的时间越小,效率越高。
通常,对于步进电机,该值在100 ~ 500之间,对于伺服电机系统,可以设置在400 ~ 1200之间。
在设置过程中,开始设置小一点,运行一段时间,重复做各种典型运动,注意观察,如果没有异常情况,然后逐步增加。
如果发现异常情况,则降低该值,并留50%~100%的保险余量。
4.弯道加速度:用以描述多个进给轴联动时的加减速能力,单位是毫米/秒平方。
它决定了机床在做圆弧运动时的最高速度。
这个值越大,机床在做圆弧运动时的最大允许速度越大。
通常,对于步进电机系统组成的机床,该值在400~1000之间,对于伺服电机系统,可以设置在1000 ~ 5000之间。
步进电机的细分控制
步进电机的细分控制
步进电机的细分控制是指通过对电机的控制信号进行细分,使电机的转动角度变得更精确。
通常情况下,步进电机有固定的步距角度,比如1.8度、0.9度等。
但通过细分控制,可以将
这个步距角度进一步细分,从而实现更精确的控制。
细分控制常用的方法是使用微步驱动器。
微步驱动器可以将电机的控制信号进行细分,使电机能够以更小的步距角度运动。
常见的微步数有2、4、8、16、32、64等。
例如,如果一个步进电机的步距角度为1.8度,通过设置微步数为16,就可以将每个步进分为16个微步,从而实现步距角度为0.1125度的细
分控制。
细分控制可以提高步进电机的精度和平滑性,减小震动和噪音。
但同时也增加了系统的复杂性和控制难度。
细分控制还可以实现步进电机的微调和精确定位,适用于需要高精度的应用场合,如3D打印机、数控机床和精密仪器等。
需要注意的是,细分控制会增加步进电机的功耗和热量产生,需要考虑电机和驱动器的散热问题。
此外,选择合适的驱动器和控制方式也是细分控制的关键,不同的电机和应用场景可能需要不同的控制方法和参数设置。
步进电机驱动器及细分控制原理

步进电机驱动器及细分控制原理引言:步进电机是一种将电脉冲信号转化为机械转动的电动机。
步进电机驱动器是一种用于控制步进电机旋转的设备。
步进电机可以通过控制驱动器提供的电流和脉冲信号来精确地控制旋转角度和速度。
本文将介绍步进电机驱动器的工作原理以及细分控制的原理。
一、步进电机驱动器的工作原理:1.输入电流转换:驱动器将输入的电流信号转换为电压信号。
电流信号通常由控制器产生,通过选择合适的电阻来控制输入电流的大小。
2.逻辑控制:驱动器还会接收来自控制器的脉冲信号。
这些脉冲信号会相互间隔地改变驱动器输出的电压,从而驱动步进电机旋转。
脉冲信号的频率和脉冲数量会影响步进电机的转速和旋转角度。
3.输出电压控制:驱动器会根据输入的电流和脉冲信号控制输出的电压,使其适应步进电机的工作要求。
输出电压的频率和脉冲数有助于控制步进电机旋转的速度和角度。
二、细分控制原理:细分控制是指通过控制驱动器输出的电压脉冲信号来实现更精确的步进电机控制。
细分控制可以将步进电机的每个脉冲细分成更小的步进角度,从而提高步进电机的转动分辨率。
1.脉冲信号细分:通过改变驱动器的输出脉冲信号频率和脉冲数来实现脉冲信号的细分。
例如,如果驱动器输入100个脉冲,但只输出50个脉冲给步进电机,那么每个输入的脉冲就会分为两个输出脉冲,步进电机的旋转角度将更精确。
2.电流细分:通过改变驱动器输出的电流大小来实现电流的细分。
通常情况下,驱动器的输出电流会根据步进电机的转动需要进行控制。
细分控制可以使驱动器能够实现更精确的电流控制,进而控制步进电机的转动精度。
3.微步细分:微步细分是一种更高级的细分控制方法,通过改变驱动器输出的电压波形进行微步细分。
微步细分将步进电机的每个步进角度再次细分为更小的角度,进一步提高了步进电机的转动分辨率和平滑性。
总结:步进电机驱动器是通过将控制器产生的电流和脉冲信号转换为驱动步进电机的电压信号的设备。
细分控制是通过改变驱动器输出的电流和脉冲信号来实现更精确的步进电机控制。
步进电机驱动器细分和不细分的区别

步进电机驱动器细分和不细分的区别步进电机驱动器细分和不细分的区别是不细分的驱动器在低速是抖动很大。
有细分的就很理想。
但细分是怎么实现的?谁知道呀!请告之。
以下是对《步进电机驱动器细分和不细分的区别》的回复:共有67人回复 分页:alame:引用 加为好友 发送留言2005-11-10 21:41:细分驱动精度高.细分是驱动器将上级装置发出的每个脉冲按驱动器设定的细分系数分成系数个脉冲输出.比喻步进电机每转一圈为200个脉冲,如果步进电机驱动器细分为32,那么步进电机驱动器需要输出6400个脉冲步进电机才转一圈.通常细分有2,4,8,16,32,62,128,256,512....刘岩利:引用 加为好友 发送留言2005-11-11 6:02:细分后,驱动器输出的电流不再是方波,而是趋近正弦波,细分数越高,效果越好。
刘岩利:引用 加为好友 发送留言2005-11-11 6:22:顺便提醒一下楼主,这里是技术论坛,纯广告是会被删除的。
风海:引用 加为好友 发送留言2005-12-1 0:06:请问刘老师,为何我使用细分功能,细分数越大反而速度提高了呢,PLC脉冲输出不变?谢谢指教!刘岩利:引用 加为好友 发送留言2005-12-1 1:03:"请问刘老师,为何我使用细分功能,细分数越大反而速度提高了"能给出具体数据吗?单纯这样一句话,超出我的理解能力了。
一一哦哦:引用 加为好友 发送留言2005-12-9 0:45:请问刘老师,步进驱动器上有细分拨码,是不是把它拨到细分最大时最好呢?细分的大,小对电机运作起来有什么影响呢?谢谢指教!peter69:引用 加为好友 发送留言2005-12-9 8:28:关于驱动器的细分原理及一些相关说明:在国外,对于步进系统,主要采用二相混合式步进电机及相应的细分驱动器。
但在国内,广大用户对“细分”还不是特别了解,有的只是认为,细分是为了提高精度,其实不然,细分主要是改善电机的运行性能,现说明如下:步进电机的细分控制是由驱动器精确控制步进电机的相电流来实现的,以二相电机为例,假如电机的额定相电流为3A,如果使用常规驱动器(如常用的恒流斩波方式)驱动该电机,电机每运行一步,其绕组内的 电流将从0突变为3A或从3A突变到0,相电流的巨大化,必然会引起电机运行的振动和噪音。
步进电机驱动方式(细分)概述
步进电机驱动方式(细分)概述众所周知,步进电机的驱动方式有整步,半步,细分驱动。
三者即有区别又有联系,目前,市面上很多驱动器支持细分驱动方式。
本文主要描述这三种驱动的概述。
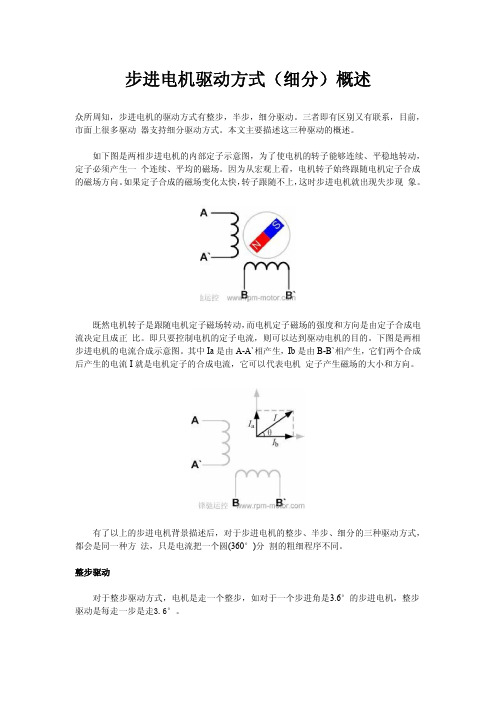
如下图是两相步进电机的内部定子示意图,为了使电机的转子能够连续、平稳地转动,定子必须产生一个连续、平均的磁场。
因为从宏观上看,电机转子始终跟随电机定子合成的磁场方向。
如果定子合成的磁场变化太快,转子跟随不上,这时步进电机就出现失步现象。
既然电机转子是跟随电机定子磁场转动,而电机定子磁场的强度和方向是由定子合成电流决定且成正比。
即只要控制电机的定子电流,则可以达到驱动电机的目的。
下图是两相步进电机的电流合成示意图。
其中Ia是由A-A`相产生,Ib是由B-B`相产生,它们两个合成后产生的电流I就是电机定子的合成电流,它可以代表电机定子产生磁场的大小和方向。
有了以上的步进电机背景描述后,对于步进电机的整步、半步、细分的三种驱动方式,都会是同一种方法,只是电流把一个圆(360°)分割的粗细程序不同。
整步驱动对于整步驱动方式,电机是走一个整步,如对于一个步进角是3.6°的步进电机,整步驱动是每走一步是走3.6°。
下图是整步驱动方式中,电机定子的电流次序示意图:由上图可知,整步驱动每一时刻只有一个相通电,所以这种驱动方式的驱动电路可以是很简单,程序代码也是相对容易实现,且由上图可以得到电机整步驱动相序如下:BB’→A’A→B’B→A A’→B B’下图是这种驱动方式的电流矢量分割图:可见,整步驱动方式的电流矢量把一个圆平均分割成四份。
下图是整步驱动方式的A、B相的电流I vs T图:可以看出,整步驱动描出的正弦波是粗糙的。
使用这种方式驱动步进电机,低速时电机会抖动,噪声会比较大。
但是,这种驱动方式无论在硬件或软件上都是相对简单,从而驱动器制造成本容易得到控制。
半步驱动对于半步驱动方式,电机是走一个半步,如对于一个步进角是3.6°的步进电机,半步驱动是每走一步,是走1.8°(3.6°/2)。
步进电机驱动器及细分控制原理
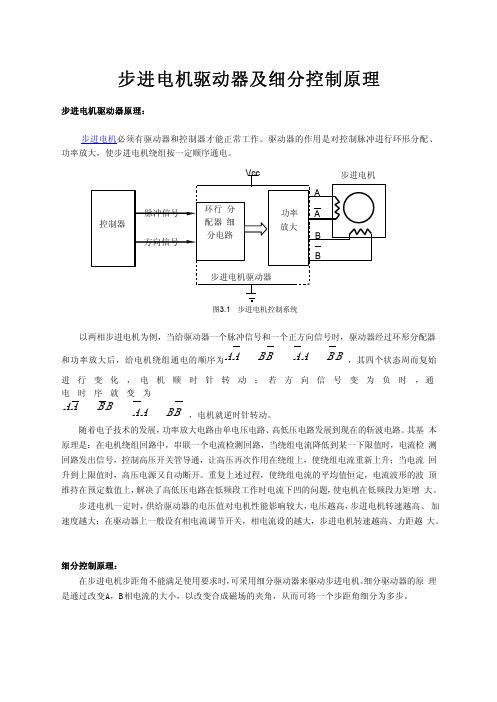
步进电机驱动器及细分控制原理步进电机驱动器原理:步进电机必须有驱动器和控制器才能正常工作。
驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电。
以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经过环形分配器和功率放大后,给电机绕组通电的顺序为AABB A A B B,其四个状态周而复始进行变化,电机顺时针转动;若方向信号变为负时,通电时序就变为AA B BA A BB,电机就逆时针转动。
随着电子技术的发展,功率放大电路由单电压电路、高低压电路发展到现在的斩波电路。
其基本原理是:在电机绕组回路中,串联一个电流检测回路,当绕组电流降低到某一下限值时,电流检测回路发出信号,控制高压开关管导通,让高压再次作用在绕组上,使绕组电流重新上升;当电流回升到上限值时,高压电源又自动断开。
重复上述过程,使绕组电流的平均值恒定,电流波形的波顶维持在预定数值上,解决了高低压电路在低频段工作时电流下凹的问题,使电机在低频段力矩增大。
步进电机一定时,供给驱动器的电压值对电机性能影响较大,电压越高,步进电机转速越高、加速度越大;在驱动器上一般设有相电流调节开关,相电流设的越大,步进电机转速越高、力距越大。
细分控制原理:在步进电机步距角不能满足使用要求时,可采用细分驱动器来驱动步进电机。
细分驱动器的原理是通过改变A,B相电流的大小,以改变合成磁场的夹角,从而可将一个步距角细分为多步。
定子A转子SNB B BSNA A(a)(b)AS NB B N S BS NA(c)(d)图3.2步进电机细分原理图仍以二相步进电机为例,当A、B相绕组同时通电时,转子将停在A、B相磁极中间,如图3.2。
若通电方向顺序按AA AABB BB BB AA AA AA BB BB BB AA,8个状态周而复始进行变化,电机顺时针转动;电机每转动一步,为45度,8个脉冲电机转一周。
与图2.1相比,它的步距角小了一半。
步进电机的细分原理

步进电机的细分原理
步进电机的细分原理是指将步进电机的每个步进角度再进行更加精细的划分,以增加电机的精度和平滑性。
细分原理的基本思想是通过改变电机的驱动信号来控制电机的步进角度。
步进电机通常由一个转子和一个定子组成,定子上带有一组绕组,而转子则带有一组磁极。
根据步进电机的类型不同,转子上的磁极数量可能是奇数或偶数。
在正常情况下,步进电机的每一步进角度是固定的,例如对于一个普通的四相步进电机,每一步进角度是90度。
然而,通过细分原理,可以将每个步进角度再次划分为更小的角度。
这样做的关键在于电机驱动的控制信号。
通常情况下,步进电机的驱动信号是一个脉冲信号,每个脉冲触发电机转动一小步。
通过改变脉冲信号的频率和宽度,可以改变电机的步进角度和速度。
细分的原理是通过在每个步进角度中插入更多的脉冲信号来实现。
例如,将每个步进角度细分为两个小步进角度,那么在原先一个步进角度内,就会插入一个额外的脉冲信号。
这样做的结果是电机转动更加平滑,步进角度更加精细。
细分原理的另一个关键技术是微步驱动技术。
微步驱动技术利用了步进电机绕组的特性,通过改变绕组的相位差来实现步进角度的细分。
这样做的好处是可以在不增加电机绕组的情况下,实现步进角度的细分。
总的来说,步进电机的细分原理通过改变驱动信号的频率、宽度和相位差来实现步进角度的细分。
这样做可以提高电机的精度和平滑性,适用于一些对步进角度要求较高的应用,例如打印机、数控机床等。