测深仪连接RTK测量水深步骤及水深的资料后处理65页PPT
测深仪配合RTK在水下测量中的应用

第30卷第2期2007年4月测绘与空间地理信息GEOMA TICS &SPA T I AL I N FORMA TI ON TECHNOLOGYVol .30,No .2Ap r .,2007收稿日期:2006-09-04作者简介:陈 超(1972-),男,安徽淮北人,学士,现主要从事城市测量工作。
测深仪配合RTK 在水下测量中的应用陈 超,郝鸿亮(淮北市测绘院,安徽淮北235000)摘要:测深仪配合RTK 采集数据,进行数字化成图。
本文就其精度保证及其成图方法进行介绍。
关键词:水深测量;RTK;精度中图分类号:P228;P204 文献标识码:B 文章编号:1672-5867(2007)02-0135-03Appli cati on of Depth Sounder I ntegrated withRTK i n Underwater Surveyi n gCHEN Chao,HAO Hong 2liang(Hua i be i I n stitute of Survey i n g and M app i n g,Hua i be i 235000,Ch i n a)Abstract:This paper intr oduced the app licati on of dep th s ounder integrated with RTK t o collect data and p r oduce digital map.It dis 2cussed the quality contr ol method and work fl ow of digital mapp ing in under water surveying .Key words:water dep th surveying;RTK;accuracy0 引 言传统的水深测量方法是把一定精度的水准高程引测至测区附近,测得当天的水面高度,然后利用全站仪定位,测深仪进行测量水深再经过繁杂的数据处理,得到水深数据和水底高程,对于那些大、中型水域的水下测量如果用传统的方法,工作量和难度是非常大的。
GPS-RTK结合测深仪在水下地形测量中的应用
GPS-RTK结合测深仪在水下地形测量中的应用摘要随着GPS技术的快速发展,应用于工程测量越来越普及,使用移动测量的用户空间越来越大,方便快捷、高精度和定位准确的性能愈显其优越性,将GPS技术与测深仪技术相结合,是水下地形测量技术的一次飞跃,是先进的科学技术在生产活动中的重要应用。
关键词地下地形测量;测深仪;GPS-RTK1 概述1.1 水下地形测量的重要性随着工程建设的需要和工程开发,越来越多的需要进行水下地形测量,掌握规划、设计的资料,为工程建设提供技术支撑。
在水利建设中的河道、港口开发、水库库容复核等都要进行水下地形测量,随着社会对海洋的开发利用,海域测量同样越来越多。
在水下地形测量中对质量要求同样越来越高,这就需要在进行水下地形测量中使用新仪器、新技术,来减轻工作人员的劳动强度。
测量工作在防洪减灾中发挥重要作用,具有很大的社会效益和经济效益。
1.2 GPS-RTK技术简介GPS-RTK系统主要由基准站、流动站、数据通讯系统3部分组成。
GPS-RTK 是以载波相位观测量为依据的实时差分测量技术,它实时地获得测站点在特定坐标系中的三维坐标。
流动站是在获得固定解后接收基准站的数据,能够迅速及时的获得所需点的坐标,测量精度达到厘米级,能够满足设计和规划的精度要求。
这样就极大地扩展了作业距离,提高工作效率。
1.3 测深仪技术简介测深仪利用水声换能器发出超声波在均匀介质中直线传播,在遇到不同的介质反射的原理。
在测量时需将换能器发在水下一定位置,垂直向下发射声波并接收水底回波,根据声速和回波时间来确定被测点的水深,通过测得水深获得水下地形、地貌的基本情况,通常情况下水下地形测量采用与陆上统一基准面和坐标系。
1.4 RTK结合测深仪工作机制RTK结合测深仪作业模式就是既采用RTK实时采集的坐标、高程又采用测深仪测得的水深,即H=H0-(h+hi),式中,H为河底高程,H0为水面高程,h 为换能器吃水深,hi为换能器底部到河底的水深。
GPS—RTK配合测深仪进行水下测量原理及步骤
GPS—RTK配合测深仪进行水下测量原理及步骤本文就RTK测绘技术配合回声测深仪进行水下地形测量的原理、工作方法、注意事项进行介绍。
标签:GPS-RTK 回声测深仪水下测量随着水利水电工程的大量建设,众多的大型水库、特大型河流、海洋的测量任务越来越多。
传统的河流水下地形测量是在岸边通视条件良好的图根控制点上架设全站仪,用全站仪观测船体的方位,通过计算船体的平面位置,再利用静水水面高程与船体的水深来求得测量点的水下高程。
这种测量方法显然是把平面位置测量和水深测量是分开进行的,测量精度、效率都不能得到很好的保障。
1测深仪种类测深仪就是测量水深的仪器或装置。
有声学、激光、压力、电磁式测深仪,以及纲缆等机械测深装置,较常用的是回声测深仪,利用声波反射的信息测量水深的仪器。
其中有一类超声波测深儀,所使用的声波频率在2万赫以上回声测深仪的问世,使海深测量技术发生了根本性的变革。
目前已有升沉补偿测深仪、拖曳式测深仪、多波束测深仪等多种不同类型的测深仪器,这些都是由于海洋勘探的需要而发展起来的设备。
人们根据工作深度的不同,设计制造了大小不同的测深仪器。
小型测深仪的工作频率在100千赫兹左右,换能器尺寸较小,可在小艇上使用,用于测量几十米到几百米水深的海洋深度。
而大型测深仪的工作频率为数千赫兹左右,换能器尺寸较大,可测量深达10000米的世界海洋最深处的水深。
此外,还有一种双频测深仪。
所谓双频测深仪就是指能用高、低两种不同频率工作的测深仪器。
这种测深仪适用于测量沉积有稀泥的航道,它能用较低的工作频率探测较硬的真海底,或用较高的工作频率探测稀泥表面。
现在,回声测深仪的显示、记录方式也有多种不同类型。
近代测深仪除用放电或热敏纸记录器记录外,还有数字显示及存储,甚至可以和计算机结合起来而自动绘制海底地形图等多种不同方式。
2工作原理2.1回声探测设备是最早的一类水下声学仪器,这种设备得到了广泛地应用所有这样的设备都有一个共同的特点:它们都利用一组发射换能器在水下发射声波,使声波沿海水介质传播,直到碰到目标后再被反射回来,反射回来的声波被接收换能器接收。
测深仪与RTK在海洋水深测量中的应用
测深仪与R K T 在海洋水深测量中的应用
芦 斌 尹 岚 华北地质勘查局五一四地质弋队
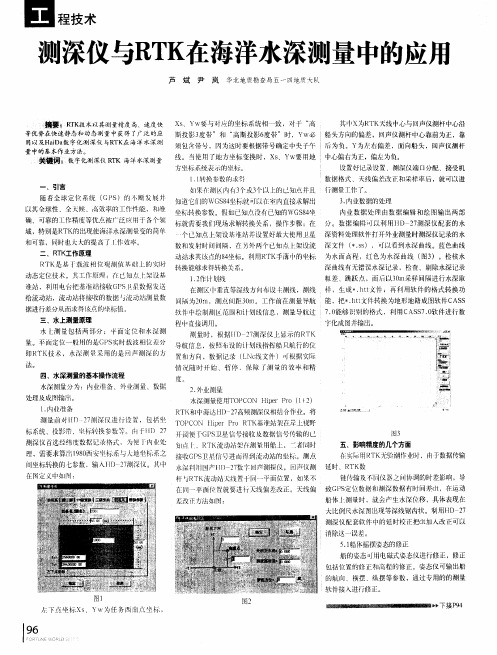
、Yw要与对应的坐标系统相一致 ,对于 “ 高 摘要{R K T 技术以其测量精度高、速度快 Xs 其 为R { TK天线 中心与回声仪测杆中心沿
等优 势在 快速静 态 和 动态 测量 中 获得 了广泛 的 应 斯投影3 度带”和 “ 高斯投影6 度带”时 ,Yw必 船头方向的偏差,同声仪删杆中心靠前为正,靠 用 以及HaD 数 字 化测 深仪 与R K在 海 洋水 深 测 ia T 须包含带号,网为这时要根据带号确定巾央子午 后为负。Y为左右偏差,面向船头 ,回声仪测杆 量 中的基 本作 业 方法 。 线。当使用 了地方坐标变换时 ,X 、Y s w要用地 中心偏右为正,偏左为负。
度。
2 外业 测量 .
处理及 成 图输 出。
水深测量使用TO C N p rP o( } ) P O Hie r 1 2 R I1 i: I 7 TK [O ̄达H )2 高频测深仪相结合作业。将 O T P ON Hie r K基准站架在岸上 野 O C pr P o RT 开阔使 ]G S = P 卫星信号接收歧教擗信号传输的 点 .RT K流动站架 测 用船上 ,_苦同时 二 ㈣糍
测深仪配套软件中的延时校正把d) 入改正可以 tN )
消除这一误差。 51 .船 摇摆姿态的修正
船的姿态oH 电磁式姿态仪进行修正,修正 J】 ‘
转 换 能够 求,转 换 关 系。 导 12 计 划线 .作 深 曲线 有无 错误 水 深记 录 ,检查 、剔除 水深 记 录
动态定位技术。 工怍原理 : 已知点 卜 架设基 准站,利用电台把基准站接收GP Z s】星教据发送 给流动站 ,流动站将接收的数据 流动站测量数 j 据进行差分从而求得该点的坐标值。 三、水上测量原理
如何运用RTKGPS技术进行水深测量
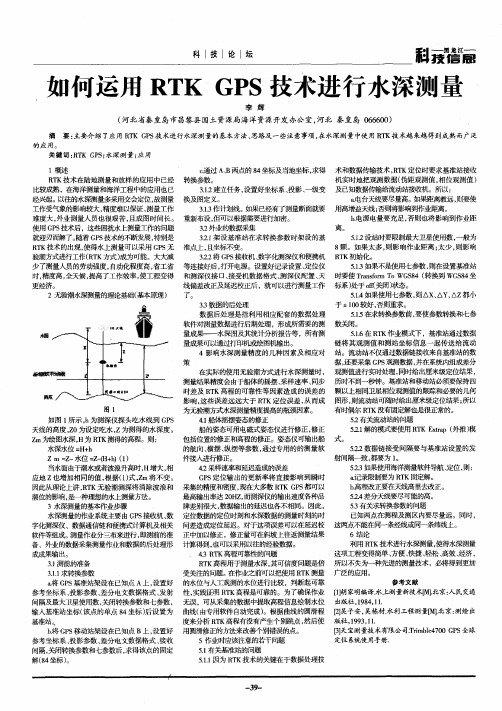
1概 述 以 过 AB 苴 、 两点的 8 坐标及 当地坐标 , 4 求得 术和数据传输技术 ,T R K定位时要求基准站接收 R K技术在陆地测量和放样的应用 中已经 转换参数。 T 机实时地把观测数据 ( 观测值 , 伪距 相位观测值 ) 比较成熟 , 在海洋测量和海洋工程中的应用也 已 32建立任务 , .2 1 设置好坐标系、 投影、 一级变 及已知数据传输给流动站接收机。所以: 经兴起。 以往的水深测量多采用交会定位 , 故测量 换及图定义 。 a 电台天线要尽量高。 如果距离教远, 则要使 工作受气象 的影响较大, 精度难以保证, 测量工作 否则将影响到作业距离。 3 .作计划线。 . 1 3 如果已经有了测量断面就要 用高增益天线 ; 难度大 , 外业测量人员也很艰苦 , 且成图时间长 。 重新布设 , 但可以根据需要进行加密。 h 电源电量要充足 , 否则也将影 响到作业距 使用 G S P 技术后 , 这些困扰水上测量工作的问题 3 外业的 . 2 数据采集 离。 就迎刃而解了。 随着 G S P 技术的不断发展 , 特别是 3 .架设基准站在求转换参数时架设的基 .1 2 5 .设站时要限制最大卫星使用数, .2 1 一般为 8 颗。如果太多 , 则影响作业距离 ; 太少 , 响 则影 R K技术的出现 , T 使得水上测量可以采用 G S P 无 准 , 上 且坐标不变。 验潮方式进行工作(T R K方式) 成为可能。大大减 32 GS 2 将 P 接收机 、 数字化测深仪和便携机 R K初 始化 。 T 少了测量人员的劳动强度 , 动化程度高 , 自 省工省 等连接好后 , 打开电源。设置好记录设置、 定位仪 5 .如果不是使用七参数 , .3 1 则在设置基准站 时, 精度高, 全天候, 提高了工作效率 , 使工程变得 和测深仪接口、 接受机数据格式 、 测深仪配置 、 天 时要使 Ta s r oW ̄ 8 转换到 WG 8 坐 r f m T ¥ 4( no S4 处于 。 关闭) 状态。 更经济。 线偏差改正及延迟校正后 , 就可以进行测量工作 标系) 2无验潮水深测量的理论基础( 基本原理) 了。 5 _如果使用七参数 , △ 、 Y △ 都小 . 1 4 则 X△ 、z 3 3数据的后处理 于 ± 0 较好, 10 否则重求。 数据后处理是指利用相应配套的数据处理 5_在求转换参数前 , .5 1 要使参数转换和七参 软件对测量数据进行后期处理 , 形成所需要的测 数关闭。 5 .在 R K作业模式下 , . 1 6 T 基准站通过数据 量 成果——水深图及其统计分析报告等,所有测 链将其 观测值 和测站 坐标信息一起传送给流动 量成果可以通过打印机或绘图机输出。 4影 响水深测量精度的几种 因素及相应对 站。流动站不仅通过数据链接收来 自 基准站的数 ● 策 据, 还要采集 G S 0 P 观 数据, 并在系统内组成差分 在实际的使用无验潮方式进行水深测量时 , 观测值进行实时处理 , 同时给出厘米级定位结果 , 黼 z 测量结果精度会由于船体的摇摆、 采样速率、 同步 历时不到一秒钟。基准站和移动站必须要保持四 时差及 R K高程的可靠性等因素造成的误差 的 颗以上相 同 T 卫星相位观测值的跟踪和必要的几何 / 、 童● l o霄 " 影响 , 这些误差远远大 于 R K T 定位 误差 , 从而成 图形 , 则流动站可随时给出厘米级定位结果 ; 所以 图 1 为无验潮方式水深测量精度提高的瓶颈因素。 有时偶尔 R K没有固定解也是很正常的。 T 5 . 2有关流动站的问题 如图 l 所示 , 为测深仪探头吃水线到 G S h P 4 船体摇摆姿态的修正 1 5 解的 21 模式要使用 R K E t p( T x a 外推) r 模 天线的高度 , z 0为设定吃水 , z为测得 的水深度。 船的姿态可用电磁式姿态仪进行修正 , 修正 包括位置 的修正和高程的修正。姿态仪可输出船 式。 Z m为绘图水深 , R K测得的高程。则: H为 T 水深水位 = + Hh 的航 向、 、 横摆 纵摆等参数 , 通过专用 的的测量软 5 2数据链接受 间隔要与基准站设置的发 . 2 射间隔一致 , 都要为 1 。 zn =一 l z 水位 = — h ( ) z 假+ ) 1 件接 入 进行修正。 53 2 如果使用海洋测量软件导航、 , 定位 则: 当水面由于潮水或者波浪升高时, H增大 , 相 4 采样速率和延迟造成的误差 . 2 GS P 定位输 出的更新率将直接影响到瞬时 录限制要为 R K固定解。 T 应地 z也增加相同的值 , 根据( ) , 1 Z 式 m将不变。 现在大多数 R KG S T P 都可以 b . 高程改正要在天线高里去改正。 因此从理论上讲,T R K无验潮测深将消除波浪和 采集的精度和密度 , 5 A差分天线要尽可能的高。 . 2 潮位的影响, 是一种理想的水— 测量方法。 匕 最高输出率达 2H , 0 Z而测深仪的输出速度各种品 5 3有关求转换参数的问题 3 水深 量的基本作业步骤 4 牌差别很大 , 数据输出的延迟也各不相同。因此 , 已知两点在测程及测区内要尽量远。同时 , 水深涣量的作业系统主要由 G s 4 P 接收机 、 数 定位数据的定位时刻和水深数据的测量时刻的时 字化测深仪、数据通信链和便携式计算机及相关 间差造成定位延迟。对于这项误差可以在延迟校 这两点不能在同—条经线或同—条纬线上。 6结论 软件等组成。 测量作业分三布来进行 , 即测前的准 正中加以修正, 正量可在斜坡上往返测量结果 修 利用 R K技术进行水深测量 , T 使得水深测量 备、外业的数据采集测量作业和数据的后处理形 计算得到 , 也可以 采用以往的经验数据。 4 T 3 .R K高程可靠 性的问题 这项工程变得简单 、 方便、 快捷、 轻松、 高效、 经济 , 威 出。 R K高程用于测量水深 , T 其可信度问题是倍 所以不失为—种先进的测量技术 , 必将得到更加 3 测前的准备 . 1 3 .求转换参数 .1 1 受关注的问题。 在作业之前可以把使用 R K测量 广泛的应用。 T 参 考文献 a GS 将 P 基准站架设在已知点 A上, 设置好 的水位与人工观测的水位进行比较 , 判断起可靠 1 瑚 水上测量新技术【J M. 北京: 人民交通 参考坐标系、 投影参数、 差分电文数据格式、 发射 性, 实践证明 R K高程是可靠的。为了确保作业 【 家明编译. T 可从采集的数据中提取高程信息绘制水位 出版社 ,9 4 1 . 1 8 ,1 间隔及最大卫星使用数 , 关闭转换参数和七参数 , 无误, 由专用软件 自 动完成 ) 。根据曲线 的圆滑程 [吴子安 , 2 ] 吴栋材. 水利工程测量嗍 . 北京: 测绘出 输入基准站坐标( 该点 的单点 8 坐标 ) 4 后设置为 曲线( 19 1. 度来分析 R K高程有没有产生个别跳点 , T 然后使 版社 ,9 3, 1 基准站。 . b GS 将 P 移动站架设在 已知点 B , 置好 用 圆滑修正的方法来改善个别错误的点。 上 设 冈天宝测量技术有限公 司. i b 4 0 P 全球 T m l 7 0G S r e 定 位 系统 使 用手册 . 参考坐标系 、 投影参数 、 差分电文数据格式、 接收 5 作业时应该注意的若干问题 间隔, 关闭转换参数和七参数后 , 求得该点的固定 5 有关基准站的问题 . 1 5 . 因为 R K技术 的关键在于数据处理技 .1 1 T 解(4坐标 ) 8 。
RTK测深数据后处理
RTK测深数据后处理
1、打开水深资料处理软件
点击获取任务,文件类型选择NA V后缀格式,调入国投湄洲岛文件。
测深改正数和测深仪改正数一般不输。
因为是RTK测深,测量的高程都是实时高程,所以水位改正数也可不输。
2、水深数据-----采集水深取样。
文件---打开原始数据(后缀名为SS格式文件),选择LN4.SS,右边点击“只取定位点”,蓝色的一条是GPS高程,红色的代表海底高程。
拉动最下面一行滚条,
直至拉到74--79号点,此时这些点为假水深点。
打开测深仪软件,点击回放,选择.hds后缀文件,打开07-12-02.hds,可点击快进,直至到74—79号点,(其实假水深就是因为增益调太大,测深仪收到信号之后又反射回去再接收,数据处理软件上面的数据显示的是下面的高程),然后把74—79号点的水深记下,74号 3.75m,75号 2.85m,76号
回到数据处理软件界面,右边量程可以选择+或-,鼠标按住红线,把74号点拉到3.75m处,75号点拉到2.85m处……把全部的假水深数据处理完之后,点击文件---生成HTT与xyhz格式文件。
此时会生成一个SS1(编辑过的SS文件)和HTT文件。
因为是RTK测深,所以水位改正不要做。
点功能----格式转换,选择要生成的格式(一般选择南方CASS.DAT格式),确定,左边选择生成的HTT文件,即LN4.HTT。
点确定之后生成一个最终数据LN4_CASS.DAT。
用Cass软件打开即可。
RTK水上测量一般步骤
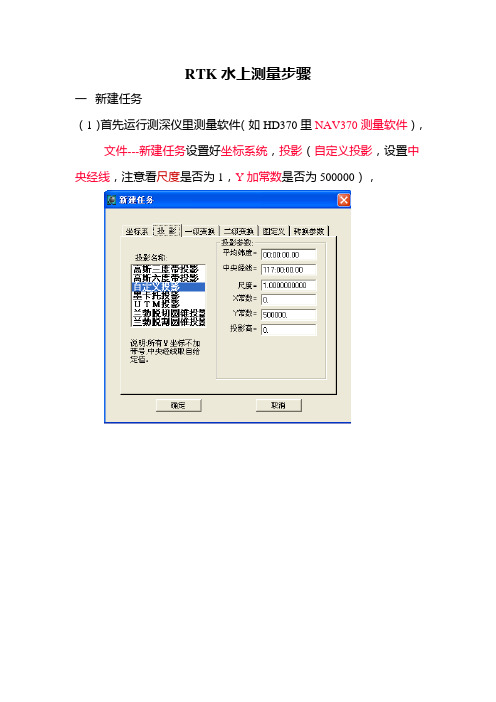
RTK水上测量步骤一新建任务(1)首先运行测深仪里测量软件(如HD370里NAV370测量软件),文件---新建任务设臵好坐标系统,投影(自定义投影,设臵中央经线,注意看尺度是否为1,Y加常数是否为500000),图定义(图幅名称,图比例尺,长宽,左下角坐标)。
一级变换二级变换及转换参数此时不用管也不必启用。
(2)布计划线:2.1水上测量跟陆地测量不一样,水底的地形我们是不知道的,需要布计划线,测量时船以计划线为指导,均匀扫遍所要测得区域。
布线原则:若测区靠海岸则测线要垂直于海岸线,若测岛屿则测线以岛屿为中心,呈星形向外发散,若是一般水域则测线大致要与等深线垂直。
计划线和区域可以通过CAD作好DXF格式的图,也可以通过海洋测量软件来完成。
2.2如果已有DXF,则作图——》计划测线调入——》选择格式下选DXF格式,点击调入,选择相应的DXF文件,稍等片刻文件即可导入。
2.3如需测量软件做计划线则:工作方式——》作图——》坐标库——》新建坐标库文件(.wp)——》输入测区外围折点坐标(第一点和最后一点坐标要一样,以便构成闭合区域)——》坐标作图——》区域布线(测线间隔一般为20米)——》保存任务。
二GPS连接设臵(1)设臵——》端口分配——》定位仪端口选择:COM1或COM2(看GPS连接的是那一个口)——》设臵(再次确认端口号,并设臵波特率:中海达RTK默认19200.天宝RTK为38400,南方托普康一般为115200)(2)设臵——》数据格式——》NMEA-0183 $GPGGAV2.0(可看情况选择对应的仪器型号或数据格式)(3)工作方式——》测量方式三校正设臵:移动台连上测深仪,到已知测点上进行坐标校正(1)平面校正:设臵——》固定差改正——》输入已知测点的X,Y坐标,输完点开始测定,大概十秒后点停止测定,这时会自动计算出改正数,点击确定即可。
(说明:海上测量成果都要求是标准的北京54或国家80坐标,而这两套坐标的旋转相对于WGS84系统旋转都接近0度,尺度接近1,因此平面四参数的旋转和平移采用默认值,这里只需通过固定差改正求出X,Y的平移改正数就可以了。
水深测量流程(新)资料

水深测量项目操作流程温州市子午信息工程有限公司二〇一五年十月目录测量准备 (3)第一步与业主联系 (3)第二步仪器准备 (3)第三步资料准备 (3)第四步编写测量实施方案 (3)外业测量 (3)第一步制作三参数和做计划线 (3)第二步校正仪器 (3)第三步测潮位 (3)第四步仪器转船、连接仪器 (4)第五步hypack准备 (4)航道设计: (4)第六步开始测量 (9)hypack内业工作 (9)第一步做潮位文件 (9)第二步处理假水深 (10)第三步排序 (11)第四步建模 (11)第五步成果输出 (12)地形图绘制 (15)第一步展点 (15)第二步绘图 (16)第三步分幅 (16)技术报告编写 (18)测量数据存档 (18)一级资料存档(纸质) (18)可追溯资料存档(纸质) (18)电子资料存档(纸质) (18)测量准备第一步与业主联系明确测量地点、范围、要求、时间、测量船只的准备,并现场勘测,用Rtk 测量两个点,记下坐标,用来做计划线。
(向业主提供控制点,如不能提供需要自己去找)第二步仪器准备准备好水深测量所需要的仪器(充电及调试):1、测深仪:主机、换能器、信标机、连接线(3)、校仪挡板、测深纸、2、RTK:主机、手簿、天线、数据线、对中杆、电池3、其他:汽车、电脑(工控机、笔记本)、照相机摄像机、蓄电池×2、蓄电池充电器、电压转换器、皮艇(视情况而定)、绳子、外业记录板、测距仪、皮尺、卷尺。
第三步资料准备计划线、验潮表、外业记录表、控制资料。
第四步编写测量实施方案测量实施方案包括本项目负责人、组成成员、测区位置、测量时间、任务分配和具体方案。
外业测量第一步制作三参数和做计划线1、利用1个控制点输入WGS84经纬度和实测经纬度计算出三参数。
2、用Rtk测量的两个点来做计划线。
第二步校正仪器找一个控制点进行校正仪器,然后选定一个点作为潮位的标准点,测出高程。
第三步测潮位注意测完之后迅速做成潮位数据(即用标准点高程减去皮尺读数)。