第六章IIR数字滤波器的设计
数字信号处理第六章 IIR数字滤波器设计

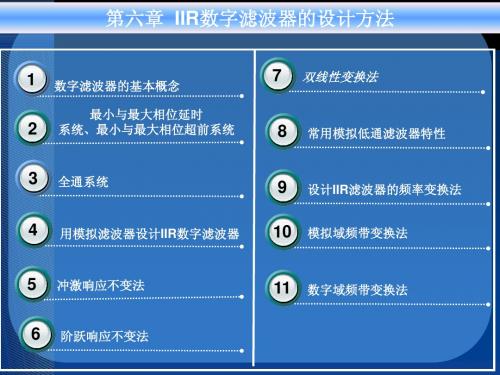
D' ( p) p N bN 1 p N 1 bN 2 p N 2 „ b1 p b0
b0 b1
b2 b3 b4 b5 b6 b7
b8
阶数N
1 2 3 4 5 6 7 8 9 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 -1.0000 1.4142 2.0000 2.6131 3.2361 3.8637 4.4940 -5.1258 5.7588 2.0000 3.4142 5.2361 7.4641 10.0978 13.1371 16.5817 5.2361 9.1416 14.5918 21.8462 31.1634 3.2361 7.4641 14.5918 25.6884 41.9864 3.8637 10.0978 21.8642 41.9864 4.4940 13.1371 31.1634 5.1258 16.5817 5.7588
IIR数字滤波器的设计方法
间接设计法 根据设计指标设计相应的过渡模拟滤波器 将过渡模拟滤波器转换成数字滤波器。
直接设计法 在时域或频域直接设计数字滤波器。
本章主要讲述:(间接法)
6.1 模拟滤波器设计
6.2 IIR数字滤波器设计
6.1 模拟滤波器设计
模拟滤波器(AF)的一般设计过程: (1) 根据信号处理要求确定设计指标(选频) (2) 选择滤波器类型 (3) 计算滤波器阶数 (4) 通过查表或计算确定滤波器系统函数 Ha (s) (5) 综合实现并调试
2
(
s
)
N
A2 1
• 于是 阶数
lg k1 N lg k
第六章IIR滤波器的设计方法

的滤波器性能后,去寻找一个物理可实现的系统函数,使它的频率特性
尽可能近似所要求的滤波器特性,也就是指对理想特性进行逼近,最后 得到一个因果、稳定并且可实现的传递函数 H z ,滤波器的设计实际上
就是一个数学逼近的问题。
3.决定 H z 的实现方法(包括选择运算结构、运算制式及字长) 因为数字滤波器是一种物理可实现的线性时不变系统,所以它是用
即
1 1 H e j
1
c
在阻带中,幅度响应以误差 2 而逼近于零, 即
H e j
2
p
其中 ,c 、 p 分别为通带和阻带截止频率 。
2. 用稳定的因果系统去逼近设计的系统函数 H z 系统函数包括:无限长单位脉冲响应的系统函数和有限长单位脉 冲响应的系统函数,可根据容限选择IIR或FIR滤波器。 逼近——在滤波器设计中逼近是一个重要的环节。逼近就是给定所要求
H e j
逼近
H d e j
最优化设计一般分为两步进行: 第一步:选择最优化标准或准则
选择一种最佳准则,使得
H e j
与
H d e j
的均方误差最小或者最大
误差最小。根据最小二乘法准则,要求
E H e jwi
i 1 M
H e
数,而完成最优化设计。
3.模仿模拟滤波器的设计 因为模拟滤波器的设计目前已经很完善,AF不仅有简单和严格的设 计公式,而且它的设计参数也已经表格化了,所以很方便,因此,我
们可以借助于模拟滤波器设计的成果来设计数字滤波器。
在模拟系统中,利用工作参数综合法设计滤波器时,无论低通、高 通、带通、带阻滤波器,均是先设计一个低通原型,然后经过某种频 率变换完成要求设计的滤波器。 即: 利用模拟滤波器设计数字滤波器, 首先利用模拟滤波器的现成结果,
第6章IIR数字滤波器的设计

3、归一化的系统函数 如果将系统函数的 s , 用滤波器的截止频率 c 去除 ,这样对应的截止频率变为1rad/s,即所谓归一化,相 应的系统函数称作归一化的系统函数记作 H an ( s ')
H an ( s ') H a ( s) |s c s '
H a ( s) H an ( s ') |
中北大学信息与通信工程学院
18 /88
数字信号处理 第六章 IIR数字滤波器的设计
N=4
N=5
中北大学信息与通信工程学院
19 /88
数字信号处理 第六章 IIR数字滤波器的设计
取 H a(s) H a(s) 左半平面的极点为 H a(s) 的极点, 这样极点仅有N个,即
sk c e
则
1 2 k 1 j 2 2N
第六章 IIR数字滤波器的设计
中北大学信息与通信工程学院 信号课程建设组 主讲:李沅
中北大学信息与通信工程学院
2 /88
数字信号处理 第六章 IIR数字滤波器的设计
第六章 IIR数字滤波器的设计
6.1 数字滤波器的基本概念 6.2 模拟低通滤波器的设计 6.3 模拟滤波器的数字化方法 6.4 IIR数字滤波器设计的综合实例 6.5 其它类型的IIR数字滤波器设计 6.6 全通滤波器与最小相位系统
所以其零点全部在 s 处;即所谓全极点型, 它的极点为
s k (1)
1 2N
( j c ) c e
1 2 k 1 j 2 2N
, k 1,2,... 2 N
也就是说,这些极点也是呈象限对称的。而且分布 在巴特沃斯圆上(半径为 c),共有2N点。
第06章 IIR数字滤波器设计

第六章 IIR 数字滤波器设计1、已知模拟滤波器有低通、高通、带通、带阻等类型,而实际应用中的数字滤波器有低通、高通、带通、带阻等类型。
则设计各类型数字滤波器可以有哪些方法?试画出这些方法的结构表示图并注明其变换方法。
解:(a ) 模拟频带变换,再数字化。
(b ) 把(a )的两步合成一步直接设计。
2、设有一模拟滤波器()112++=s s s H a抽样周期T=2,试用双线性变换法将它转变为数字系统函数)(z H 。
分析:双线性变换法使模拟系统函数的s 平面和离散系统函数的z 平面之间是一一对应的关系,消除了频谱的混叠现象,其变换关系为1111--+-⋅=z z C s 解:由变换式1111--+-⋅=zz C s 及T C 2=和2=T 可得 1111--+-=z z s 所以1111)()(--+-==z z S a s H z H11111111211++-+⎪⎪⎭⎫ ⎝⎛+-=----z z z z2213)1(--++=z z3、已知模拟滤波器传输函数为:(1)11)(2++=s s s H a(2)1321)(2++=s s s H a试采用脉冲响应不变法和双线性变换法将其转换成数字滤波器,设T=2s 。
解:方法1:先用脉冲响应法(1)由题意 11)(2++=s s s H a)(s H a 的极点有两个且为:23211js +-=,23212j s --= s 域系统函数⎪⎪⎭⎫⎝⎛---+⎪⎪⎭⎫ ⎝⎛+---=232133232133)(js jjs js H az 域系统函数1)2321(1)2321(133133)(----+--+--=z ejz ejz H T j T j代入T=2s131131133133)(----+--+--=zej zej z H j j2211113cos 213sin 332------+-⋅=ze e z e z(2)由题意 1321)(2++=s s s H a s 域系统函数1321)(2++=s s s H a11211+-++=s s z 域系统函数211211111)(=------+-=T T T z e z ez H12111111------+-=z e z e对上式通分并合并两项得:23121121)(1)()(--------++--=ze z e e z e e z H 方法2:用双线性变换法(1)11)(2++=s s s H as 域系统函数2,)()(1112==-+-=T s H z H z z T s a 11111111211++-+⎪⎪⎭⎫ ⎝⎛+-=----z z z zz 域系统函数2,)()(11112==--+-=T s H z H z z T s a11111111211++-+⎪⎪⎭⎫ ⎝⎛+-=----z z z z221321---+++=z z z(2)1321)(2++=s s s H a2)()(11112==--+-⨯=T s H z H zz T s a ,1113112111211+⎪⎪⎭⎫⎝⎛+-+⎪⎪⎭⎫ ⎝⎛+-=----z z z z1212621---++=z z zZ 域系统函数2)()(11112==--+-⨯=T s H z H z z T s a ,1113112111211++-+⎪⎪⎭⎫ ⎝⎛+-=----z zz z1212621----++=zz z6.设)(t h a 表示一模拟滤波器的单位冲激响应,即⎩⎨⎧<≥=-0,00,)(9.0t t e t h t a用脉冲响应不变法,将此模拟滤波器转换数字滤波器(用)(n h 表示单位取样响应,即)()(nT h n h a =)。
第六章 IIR数字滤波器的设计方法
x(n m) e
X (e
)
上页
下页
理想滤波器不可实现,只能以实际滤波器逼近(以低通为例)
通带: c 阻带:
st
1 1 H (e
H (e
j
j
) 1
2
)
过渡带: c st
c
:通带截止 (cutoff)频率 :通带容限 :阻带(stop)截止 频率 :阻带容限
j
)] )]
j j
H (e ) H (e ) e
*
j
j
j (e
)
H (e H (e
*
) )
e
2 j (e
j
)
(e
j
H (e 1 ) ln * 2 j H (e
j
H (z) 1 ) ln 1 2 j j ) H ( z ) z e j
上页 下页
6.2、最小与最大相位延时系统、最小与最大相位超前系统
LSI系统的系统函数:
H (z) K
M M
m 1 N
(1 c m z (1 d k z
M
1
) Kz
(N M )
m 1 N
( z cm ) (z dk )
k 1
1
)
k 1
频率响应:
H (e
j
上页 下页
因果稳定系统
H (e a rg K
j
z r, r 1
n < 0时,h(n) = 0
全部极点在单位圆内:po = 0,pi = N
) 2 m i 2 p i 2 ( N M ) 2
IIR数字滤波器的原理及设计

这个式子中的常数 N是为了使(6.5)式满足而加入的。
c
这N个极点s0、s1、…、sN-1在s 平面的左半平面而且以共
轭形式成对出现,当N为奇数时, 有一个在实轴上
(为 - )。
c
6.2.1.3
一般情况下的B型低通滤波器
图 6.3
一般情况下低通滤波器的设计指标
此时,应该将角频率 标称化,通常以Ω 1为基准频率,
H z
n
hn z
N k 1 N
n
n
Ts Ak e sk nTs u nTs z n
k 1
N
Ts Ak e
n 0
s k Ts
z
1 n
Ts
Ak s k Ts 1 z k 1 1 e
(6.66)
上式中的幂级数收敛应该满足条件: e sk Ts z 1 |
模拟滤波器的逼近和综合理论已经发展得相当成熟,
产生了许多效率很高的设计方法,很多常用滤波器不仅有 简单而严格的设计公式,而且设计参数已图表化,设计起 来方便准确。
而数字滤波器就其滤波功能而言与模拟滤波器是相同的, 因此,完全可以借助于模拟滤波器的理论和设计方法来设
计数字滤波器。在IIR数字滤波器的设计中,较多地采用
的极点必须在左半平面系统才是稳定的,因而将左半s平
面的N个极点s k (k=0,1,…,N-1)分给H a (s),这样,右半 平面的N 个极点-sk就正好是Ha(s)的极点。因此有:
N c H a (s) ( s s 0 )( s s1 ) ( s s N 1 )
第六章 无限长单位冲激响应(IIR)数字滤波器的设计方法

6.1 引 言
数字滤波器的性能要求
通带截止频率 误差容限 阻带截止频率
具有误差容限的的滤波器具有三个特征范围: 通带 过渡带
阻带
1 1 H (e j ) 1,
c
c st
H (e j ) 2 , st
第六章 IIR数字滤波器的设计方法
z e j
H ( z)H ( z 1) 的零极点特征:
1 若 z re ji 是H(z)的极点,则 z e ji 是H(z-1)的极点。 r 即 H ( z)H ( z 1) 的极点是以单位圆镜像对称的,同时也是共轭的。
jIm[z]
满足上述条件的极点可能有几种情况。 对于可实现的系统,系统函数的极点都在单位圆内。 对于零点的分析类似极点,只是系统函数的零点没
0 1
Re[z]
4
有只在单位圆内的限制。
第六章 IIR数字滤波器的设计方法
6.1 引 言
M
设计IIR数字滤波器的方法 数字滤波器可用系统函数表示
H ( z)
1 ak z k
k 0
k 0 N
bk z k
对IIR系统,N>0,且一般有MN。
设计的目的就是要求出ak和bk,使对应的传输函数逼近所要求的特性。
对于因果稳定的LSI系统,其单位冲击响应 h(n)为实函数,因而满足共轭 对称条件,即 H (e j ) H (e j )
第六章 IIR数字滤波器的设计方法
6.1 引 言
幅度平方响应:
H (e
j 2
) H (e j ) H (e j ) H (e j ) H (e j ) H ( z ) H ( z 1 )
第6章 IIR数字滤波器设计
截止频率
12
巴特沃斯滤波器--幅度平方特性
•
• ▫ ▫ ▫
13
巴特沃斯滤波器--特性参数确定
14
巴特沃斯滤波器--极点分布
15
巴特沃斯归一化低通滤波器--极点表
16
巴特沃斯滤波器--系统函数Ha(s)
17
巴特沃斯归一化低通滤波器--分母多项式因式分解ຫໍສະໝຸດ 18例19
例(续)
20
例(续)
21
93
程序迭代寻找(续)
在这种程序寻找过程中,对系统函数的零、极点没有限制, 有可能零点或极点位于单位圆外: • 为了保证滤波器的稳定性,应使用比例倒置法对不稳定极 点加以修正; • 如果设计的指标还要求是最小相位滤波器,对单位圆外零 点可以采取同样的方法重新确定; • 将倒置后的零、极点再施行最优化程序。把所获得的A0 作为新的初始值进一步改进设计。
94
作业
• 156.tif
▫ 6-2、6-4、6-6
95
69
二、数字频带变换
70
二、数字频带变换
71
二、数字频带变换
特点: • 全通型变换 ▫ 单位圆映射后仍然是单位圆或多倍单位圆 • 频率刻度的非线性 ▫ 频率刻度有可能翘曲 • 保持幅度响应
72
三、频带变换原理
• 数字频带变换是在数字域进行频带变换
73
三、频带变换原理
74
三、频带变换原理
75
• “预畸变”方法是补偿 双线性变换中频率非线 性关系的有效方法。
56
“预畸变”方法
57
第三节 双线性变换法
总结: • 双线性变换的特点是在模拟滤波器和数字滤波器之间形成 一一对应的映射关系,克服了冲激响应不变法中由于映射 关系非单值性而遇到的混叠问题。 • 优点:计算过程简单,易于实现,在实际工作中广泛采用 • 缺点:模拟频率和数字频率之间存在非线性关系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 2 k 1 j( ) 2 2N
如果将低通filter归一化,就称作归一化原型 滤波器。 三、归一化原型filter的设计数据 不论哪种形式(巴特沃斯,切比雪夫)的filter, 都有自己的归一化原型filter,而且它们都有现成的数 据表可查和设计公式 例如,归一化巴特沃斯原型filter的系统函数(这 d0 里的S即 S)为 H (S)
由
所以 因此
,可确定出
。
,
二、巴特沃斯低通滤波器 1、幅度平方函数
其中,N为整数,是filter的阶数; 当 时,则
为截止频率。
即
2、幅频特性
(1)通带内有最大平坦的幅度特性; (2)不管N为多少,都通过 1 / 2 (3dB) 点。 1.0
N=2
N=4 N=8
0
3、巴特沃斯filter的系统函数 由于 在 所以其零点全部 处;即所谓全极点型,它的极点为
H a (S)
TA k H( Z) Sk T 1 Z k 1 1 e
h(n) Th a (nT )
N
2 H(e ) H a ( j j k ) H a ( j ), T T T k
j
[例6-3] AF的系统函数为
1 1 H a (S) , S 1 S 3
§6-1
引言
一、DF按频率特性分类 可分为低通、高通、带通、带阻和全通, 其特点为: (1)频率变量以数字频率 表示, , 为模拟角频率,T为抽样时间间隔; (2)以数字抽样频率 为周期; (3)频率特性只限于 范围,这 是因为依取样定理,实际频率特性只能为抽样频率的 一半。
低通
0 高通
0 带通 0
三、转换举例
例如,一低通DF的指标:在 范围,幅度特性下降小于1dB;在 阻带范围,衰减大于15dB;抽样频率 试将这一指标转换成ALF的技术指标。
解:按照衰减的定义和给定指标,则有
的通带 的 ;
假定
即
处幅度频响的归一化值为1,
这样,上面两式变为
由于
,所以当没有混叠时,根据关系式
模拟filter的指标为
6-4 冲激响应不变法
AF设计完毕以后,还应将Ha (S) 变换成H(Z), 也就是将S平面映射到Z平面。通常有三种方法: (1)冲激响应不变法; (2)阶跃响应不变法; (3)双线性变换法。 我们这里只讨论冲激响应不变法。
一、变换原理 h(n)为DF的单位冲激响应序列, a ( t ) 为AF的 h 冲激响应,冲激响应不变法就是使h(n)正好等于 h a ( t ) 的抽样值,即h (n ) h a (nT ) 如果 Ha (S) L[h a (t )], H(Z) Z[h(n)], 则有 1 2 H ( z ) Z e S T H a ( S j k) T k T Z eST 上式表明,先对H a (S) 沿虚轴作周期延拓,再经过 的映射关系映射到Z平面。
u ( n ) A k (e
k 1
Nห้องสมุดไป่ตู้
Sk T n
) u (n )
h ( n ) Zn
(e z ) A k
Sk T 1 n
A k (e z ) Ak Sk T 1 Z k 1 1 e
k 1 N n 0
n 0 k 1 N
Sk T 1 n
3、几点结论 (1)S平面的单极点S S 变为Z平面单极点Z eSkT k 就可求得H(Z)。 (2) 与H(Z)的系数相同,均为 A k (3)AF是稳定的,DF也是稳定的。 (4)S平面的极点与Z平面的极点一一对应,但两 平面并不一一对应。 例如,零点就没有这种对应关系。 4、修正的H(Z) 由于DF的频响与T成反比,当T很小时,DF的增益 过高,这样很不好,为此做如下修正:
也就是说,这些极点也是呈象限对称的。而且分布 在巴特沃斯圆上(半径为 ),共有2N点。
例如,N=2时,
N=3时,
4
取
左半平面的极点为
的极点,
这样极点仅有N个,即
则
其中,常数
由
的低频特性决定。
[例6-2]导出三阶巴特沃斯LF的系统函数,设 C 1rad / s 解: A () H ( j) 1 / 1
2 2 6
1
j )6 1 ( j1
所以
其极点为
因此有
S3 e
4 j 3
1 3 j 2 2
取前三个极点,则有
1 Ha (0) K0 A(0) 1, Ha (S) 3 2 S 2S 2S 1
4、归一化的系统函数 如果将系统函数的S, 用滤波器的截止频率去除,这 样对应的截止频率变为1,即所谓归一化,相应的系统 函数称作归一化的系统函数记作 H an (S)
an
当 0 ,增益为1,则有 d 0 a 0 ,N=1—10阶的各 1 个系数,如表5-3,P148所示。 如果 Han (S) d0 / E(S) ,则 E(S)的根。即H an (S) 的极点如表5-5,P150所示。 * 由归一化系统函数 H an (S)得 H a (S),只需将S代 入 S / 即可。
3、由
(1)求
确定
的方法
(2)分解 得到各零极点,将左半面的 极点 归于 ,对称的零点任一半归 。若要求 最小相位延时,左半面的零点归 (全部零极点 位于单位圆内)。
(3)按频率特性确定增益常数。
例6-1 由 确定系统函数 解: 。
因
所以,极点为 为 的零极点,这样 零点为
均为二阶的。我们选极点-6,-7,一对虚轴零点
6-3
ALF的设计
ALF的设计就是求出filter的系统函数 Ha(S) , 使其逼近理想LF的特性,逼近的形式(filter的类型) 有巴特沃斯型,切比雪夫型和考尔型等。而且逼近 依据是幅度平方函数,即由幅度平方函数确定系统 函数。
一、由幅度平方函数确定系统函数 1、幅度平方函数 由于 其中, 所以 是AF的系统函数, 是AF的幅频特性。
Ak Ha (S) k 1 S Sk
h a ( t ) L [H a (S)] A k e u ( t )
1 Sk t k 1 N
N
因此,
h (n ) h a (nT ) A k e
H( Z) Z[h (n )]
N
k 1
n
N
Sk nT
(S 1.931851652S 1)]
2
S 3 将S用 S / 7.032110 代入,可得 H a (S) C
Ha (S) 120923.1108 /[S2 3.64003 103 S 49.4504 106 )
(S2 9.94475 103 S 49.4504 106 )(S2 13.58498 103 S 49.4504 106 )
五、IIR数字filter的设计方法 1、借助模拟filter的设计方法 (1)将DF的技术指标转换成AF的技术指标; (2)按转换后技术指标、设计模拟低通filter的 Ha (s); (3)将 H a (s) H ( z) (4)如果不是低通,则必须先将其转换成低通 AF的技术指标。 2、计算机辅助设计法(最优化设计法) 先确定一个最佳准则,如均方差最小准则, 最大误差最小准则等,然后在此准则下 , 确定系 统函数的系数。
§ 6-2
将DF的技术指标转换为ALF的技术指标
一、意义 AF的设计有一套相当成熟的方法:设计公式; 设计图表;有典型的滤波器,如巴特沃斯,切比雪 夫等。 二、一般转换方法 1、 DLF ALF 2、 DHF AHF ALF 3、 DBF ABF ALF 4、 DBSF ABSF ALF
是AF的频响,
2、Ha(S)Ha(-S)的零极点分布特点 (1)如果S1是Ha(S)的极点,那麽- S1就是Ha(-S) 的极点;同样,如果S0是Ha(S)的零点,那麽- S0就是 Ha(-S)的零点。所以Ha(S) Ha(-S)的零极点是呈 象限对称的,例如:
(2)虚轴上的零点一定是二阶的,这是因为ha(t) 是实数时的Ha(S)的零极点以共轭对存在; (3)虚轴上没有极点(稳定系统在单位圆上无极点); (4)由于filter是稳定的,所以Ha(S)的极点一定在 左半平面;最小相位延时,应取左半平面的零点,如无此 要求,可取任一半对称零点为Ha(S)的零点。
3
20 lg Ha ( j2 10 ) 1
3
2 103 2 N 10 lg[ 1 ( ) ] 1 C 3 3 10 2 N 10 lg[ 1 ( ) ] 15 C
解上述两式得:
2 10 2 N 0.1 1 ( ) 10 C 3 3 10 2 N 1.5 1 ( ) 10 C 因此, 5.8858, C 7.04743 103 N
二、混迭失真 DF的频响并不是简单的重复AF的频响,而是AF 的频响的周期延拓,即 1 2k j H (e ) H a ( j ) T h T
根据取样定理,只有当AF的频响带限于折叠频率以内 S 时,即
才能使DF在折叠频率 内重现AF的频响,而不产生混 叠失真。但是,任何一个实际AF的频响却不是严格带 限的,就会产生混迭失真,如下图
带阻
0
全通 0
二、DF的性能要求(低通为例)
通带截止频率
阻带截止频率
0
通带
阻带 过渡带 平滑过渡
三、DF频响的三个参量 1、幅度平方响应
2、相位响应
3、群延迟
d (e j ) (e j ) d
它是表示每个频率分量的延迟情况;当其为常数时, 就是表示每个频率分量的延迟相同。 四、DF设计内容 1、按任务要求确定Filter的性能指标; 2、用IIR或FIR系统函数去逼近这一性能要求; 3、选择适当的运算结构实现这个系统函数; 4、用软件还是用硬件实现。