无线传感网定位
无线传感网络中节点定位技术的使用方法与注意事项
无线传感网络中节点定位技术的使用方法与注意事项无线传感网络是一种由大量分布在空间中的节点组成的网络,节点之间通过无线通信进行信息交换。
在这样的网络中,节点的位置信息对于很多应用至关重要,比如环境监测、物联网、空中巡航等领域。
因此,无线传感网络中节点定位技术的使用方法与注意事项非常重要。
一、节点定位技术的使用方法1. GPS定位技术:全球定位系统(GPS)是应用最广泛的定位技术之一,在户外环境下具有较高的定位精度。
使用GPS定位技术,需要在节点上集成GPS接收器,接收并处理卫星发出的定位信号。
但是,GPS技术在室内环境中效果有限,且耗电量较大,不适合长时间使用。
2. 基于信号强度的定位技术:这种技术利用节点接收到的信号强度来确定位置。
当节点接收到多个信号源,并且每个信号源的距离已知时,可以通过测量信号强度来计算节点的位置。
这种技术不需要额外的硬件成本,但存在信号覆盖范围限制和信号干扰的问题。
3. 视频定位技术:利用节点上集成的摄像头,通过分析摄像头拍摄到的图像或视频来判断节点的位置。
这种技术在一些需要高精度定位的场景中表现较好,但对摄像头的摆放位置和环境光照条件有一定要求。
4. 距离测量技术:使用超声波、红外线等技术来测量节点与其他节点或定位参考点之间的距离,进而计算节点的位置。
这种技术的定位精度与节点之间的距离测量精度密切相关,而且需要额外的硬件支持。
二、节点定位技术的注意事项1. 精度与功耗的平衡:节点定位技术需要考虑定位精度和能耗之间的平衡。
对于一些应用而言,高精度的定位是必需的,但同时也会增加节点的能耗。
因此,在选择定位技术时需要综合考虑应用场景的需求,以及节点的电源供应和维护成本。
2. 环境适应性:不同的节点定位技术在不同的环境和应用场景下表现出不同的效果。
要根据具体的应用需求和工作环境来选择合适的定位技术。
例如,在室内环境中,GPS定位技术的效果可能较差,而基于信号强度的定位技术可能更适合。
无线传感器网络原理及应用第4章定位技术ppt课件
(
x1
(
x1
x)2 x)2
( y1
(y2
y)2 y)2
ρ12 ρ22
(xn x)2 ( yn y)2 ρn2
(4-3)
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
X(ATA)1ATb
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
第4章 定位技术
4.1.2 定位算法分类 在传感器网络中,根据定位过程中是否测量实际节点间
的距离,把定位算法分为基于距离的(range-based)定位算法 和与距离无关的(range-free)定位算法,前者需要测量相邻节 点间的绝对距离或方位,并利用节点间的实际距离来计算未 知节点的位置;后者无需测量节点间的绝对距离或方位,而 是利用节点间估计的距离计算节点位置。
资金是运动的价值,资金的价值是随 时间变 化而变 化的, 是时间 的函数 ,随时 间的推 移而增 值,其 增值的 这部分 资金就 是原有 资金的 时间价 值
第4章 定位技术
4.1 定位技术简介
4.1.1 定位技术的概念、常见算法和分类 1. 无线传感器网络定位技术概念 在传感器网络节点定位技术中,根据节点是否已知自身
标为(x,y)。对于节点A、C和∠ADC,确定圆心为O1(xO1, yO1)、半径为r1的圆,,则
(xO1 x1)2 (yO1 y1)2 r1
(xO1 x2)2 (yO1 y2)2
r1
(x1
x3)2
(y1
无线传感器网络中的位置服务技术研究
无线传感器网络中的位置服务技术研究随着科技的不断发展,人们对于地理位置信息的需求越来越大,而位置服务技术也随之得到了广泛应用。
无线传感器网络作为一种新型的传感技术,在各个领域也有着广泛的应用,其中位置服务技术也成为了无线传感器网络中必不可少的一环。
本文将从什么是无线传感器网络、无线传感器网络中的位置服务技术以及未来的发展趋势等方面进行论述。
一、什么是无线传感器网络?无线传感器网络是指由大量分散的、能自组织且能自组网的小型电子设备组成的网络。
这些小型设备包括各种传感器、微处理器以及微型网络设备等等,这些设备组成一个庞大的网络并能够相互联通。
在无线传感器网络中,每个节点都是平等的,不会出现主从节点的关系。
为了能够满足不同的应用场景,无线传感器网络有许多不同的组织形式。
例如分层网络、非分层网络、小世界网络以及自组织网络等等。
同时,在实际应用过程中,无线传感器网络还需要考虑节点数量的问题,以及节点之间的通信协议等。
二、无线传感器网络中的位置服务技术位置服务技术是无线传感器网络中必不可少的一项功能。
位置服务的基本原理是通过设备获取其所处的地理位置坐标,并把这些位置信息传输到网络中的其他设备中。
在无线传感器网络中,位置服务技术可以分为以下三个方面:1、位置推断技术位置推断技术是通过设备所传输的信息来推断出设备的位置。
常用的位置推断技术包括D-S算法、TDOA算法以及FDOA算法等等。
其中,D-S算法是基于贝叶斯理论的一种概率推断算法,利用设备传输的信息来推断其位置。
TDOA算法是通过测量信号从各个节点到达目标节点所需要的时间差来计算设备的位置。
FDOA算法则是通过测量信号的频率差异来推断设备的位置。
2、位置编码技术位置编码技术是将设备的位置信息编码为数字信号,并将其传输到网络中的其他设备。
目前常用的位置编码技术包括二进制位置编码、格子位置编码以及三进制位置编码等等。
三进制位置编码是将设备的位置信息分为三级,并将其编码成三进制的数字信号。
无线传感器网络中的分布式目标跟踪与定位技术
无线传感器网络中的分布式目标跟踪与定位技术无线传感器网络(Wireless Sensor Networks,简称WSN)是一种由大量分布式无线传感器节点组成的网络系统。
这些节点能够感知环境中的各种物理量,并将收集到的数据通过网络传输给基站或其他节点。
WSN在农业、环境监测、智能交通等领域具有广泛的应用前景。
其中,分布式目标跟踪与定位技术是WSN中的一个重要研究方向。
目标跟踪与定位是WSN中的核心问题之一。
在许多应用场景中,需要对目标的位置进行实时监测和跟踪。
传统的目标跟踪与定位方法通常依赖于全局信息,要求节点之间进行频繁的通信,这不仅增加了能耗,还可能导致网络拥塞。
因此,研究人员提出了一系列分布式的目标跟踪与定位技术,以降低能耗并提高网络的可扩展性。
分布式目标跟踪与定位技术主要包括目标定位算法和目标跟踪算法。
目标定位算法用于确定目标的位置,而目标跟踪算法则用于跟踪目标的移动轨迹。
在WSN 中,节点通常通过测量目标到节点的距离或角度来实现目标定位。
常用的目标定位算法有多普勒测距算法、测角算法和基于信号强度的定位算法等。
这些算法可以根据不同的应用场景选择合适的方式来定位目标。
目标跟踪算法则是通过分析目标的运动特征来预测目标的下一个位置。
常见的目标跟踪算法有卡尔曼滤波算法、粒子滤波算法和扩展卡尔曼滤波算法等。
这些算法能够通过对目标的历史轨迹进行建模,从而实现对目标位置的预测和跟踪。
分布式目标跟踪与定位技术的关键问题之一是如何选择合适的节点进行目标跟踪和定位。
在WSN中,节点通常具有有限的计算和通信能力,因此需要选择一部分节点作为目标节点,负责目标跟踪和定位任务。
节点的选择可以通过节点自组织、节点自适应或节点协作等方式实现。
例如,可以通过节点之间的协作来实现目标跟踪和定位任务,即多个节点共同合作,通过相互通信和信息交换来提高目标定位和跟踪的准确性和可靠性。
此外,分布式目标跟踪与定位技术还需要考虑网络的能耗和通信开销。
无线传感器网络移动锚节点定位方法研究的开题报告
无线传感器网络移动锚节点定位方法研究的开题报告一、选题背景和意义随着无线传感器技术的发展和应用,无线传感器网络的研究和应用越来越广泛。
在无线传感器网络中,移动锚节点是一种常用的调度策略,可用于定位和监测目标移动。
移动锚节点定位技术是无线传感器网络中的关键技术之一,对于实现有效监测和定位目标的有效控制至关重要。
二、研究内容和方法本文将针对无线传感器网络中移动锚节点的定位方法进行研究,主要の工作是:1.系统性的调研和分析无线传感器网络中移动锚节点定位的相关理论和技术,并结合国内外的研究现状,明确现有技术的研究范围、发展趋势和应用性能;2.针对目前技术存在的问题和不足,提出一种可行的解决方案,并针对方案的可行性、可靠性等方面进行详细的论证与分析;3.使用仿真等方法对方案进行验证和实验,对方案进行优化等调整和完善,最终达到改进现有技术和提高无线传感器网络移动锚节点定位技术的综合水平的目的。
三、预期成果和意义本文的研究将会探索无线传感器网络移动锚节点定位的相关技术,提出一种新的移动锚节点的定位方案,并对其进行分析、验证和优化等相关研究。
预期的成果包括:1.提出了一种可行的无线传感器网络移动锚节点定位方案,解决了现有技术存在的问题和不足;2.在对方案进行验证和实验的基础上,对方案进行了优化和完善,并总结和分析了优化方案的优缺点;3.对无线传感器网络移动锚节点定位技术进行了研究和分析,为进一步提高无线传感器网络的监测和定位性能提供参考。
四、研究计划及进度安排本文的工作分计划和进度两方面进行安排,具体如下:第一阶段:调研和分析时间:2021年6月-2021年7月任务:对无线传感器网络移动锚节点定位的相关理论和技术进行系统性的调研和分析,查阅并整理国内外的相关研究文献,了解已有技术的研究范围、发展趋势和应用性能。
第二阶段:方案设计和论证时间:2021年7月-2021年8月任务:根据找到的现有技术和调研,提出自己的无线传感器网络移动锚节点定位方案,对方案进行详细地论证和分析,包括可靠性、可行性等方面,为后续实验和调优做好准备。
无线传感器网络的位置定位与跟踪
无线传感器网络的位置定位与跟踪无线传感器网络(Wireless Sensor Networks)是一种由大量分布式传感器节点组成的网络,这些节点能够通过无线通信相互连接并协同工作。
传感器网络的位置定位与跟踪是该领域的一个重要研究方向,它可以广泛应用于环境监测、智能交通、军事侦察等各个领域。
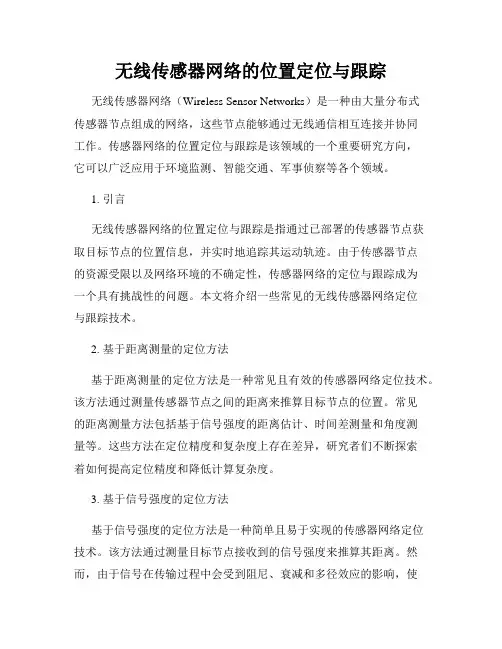
1. 引言无线传感器网络的位置定位与跟踪是指通过已部署的传感器节点获取目标节点的位置信息,并实时地追踪其运动轨迹。
由于传感器节点的资源受限以及网络环境的不确定性,传感器网络的定位与跟踪成为一个具有挑战性的问题。
本文将介绍一些常见的无线传感器网络定位与跟踪技术。
2. 基于距离测量的定位方法基于距离测量的定位方法是一种常见且有效的传感器网络定位技术。
该方法通过测量传感器节点之间的距离来推算目标节点的位置。
常见的距离测量方法包括基于信号强度的距离估计、时间差测量和角度测量等。
这些方法在定位精度和复杂度上存在差异,研究者们不断探索着如何提高定位精度和降低计算复杂度。
3. 基于信号强度的定位方法基于信号强度的定位方法是一种简单且易于实现的传感器网络定位技术。
该方法通过测量目标节点接收到的信号强度来推算其距离。
然而,由于信号在传输过程中会受到阻尼、衰减和多径效应的影响,使得基于信号强度的定位存在较大的误差。
为了克服这一问题,研究者们通常采用校准算法来提高定位精度。
4. 基于时间差测量的定位方法基于时间差测量的定位方法是一种通过测量目标节点接收到信号的到达时间差来推算其距离的传感器网络定位技术。
这种方法通常借助全球定位系统(Global Positioning System, GPS)以及同步算法来精确测量时间差。
然而,GPS在室内环境下信号弱化,导致精度下降;同时,同步算法的复杂度较高,使得该方法的应用受到限制。
5. 基于角度测量的定位方法基于角度测量的定位方法是一种通过测量目标节点和传感器节点之间的角度来推算其位置的传感器网络定位技术。
无线传感器网络节点定位技术
无线传感器网络节点定位技术定位即确定方位、确定某一事物在一定环境中的位置。
在无线传感器网络中的定位具有两层意义:其一是确定自己在系统中的位置;其二是系统确定其目标在系统中的位置。
在传感器网络的实际应用中,传感器节点的位置信息已经成为整个网络中必不可少的信息之一,很多应用场合一旦失去了节点的位置信息,整个网络就会变得毫无用处,因此传感器网络节点定位技术已经成了众多科学家研究的重要课题。
2.1基本概念描述在传感器网络中,为了实现定位的需要,随机播撒的节点主要有两种:信标节点(Beacon Node)和未知节点(Unknown Node)。
通常将已知自身位置的节点称为信标节点,信标节点可以通过携带GPS定位设备(或北斗卫星导航系统�zBeiDou(COMPASS)Navigation Satellite System�{、或预置其位置)等手段获得自身的精确位置,而其它节点称之为未知节点,在无线传感器网络中信标节点只占很少的比例。
未知节点以信标节点作为参考点,通过信标节点的位置信息来确定自身位置。
传感器网路的节点构成如图2-1所示。
UBUUUUUBUUUBUUUUUUBUUUUUU图2-1 无线传感器网络中信标节点和未知节点Figure 2-1Beaconnodes and unknown nodes of wireless sensor network在图2-1中,整个传感器网络由4个信标节点和数量众多的未知节点组成。
信标节点用B来表示,它在整个网络中占较少的比例。
未知节点用U来表示,未知节点通过周围的信标节点或已实现自身定位的未知节点通过一定的算法来实现自身定位。
下面是无线传感器网络中一些常用术语:(1) 邻居节点(Neighbor Nodes):无需经过其它节点能够直接与之进行通信的节点;(2) 跳数(Hop Count):两个要实现通信的节点之间信息转发所需要的最小跳段总数;(3) 连通度(Connectivity):一个节点拥有的邻居节点数目; (4) 跳段距离(Hop Distance):两个节点间隔之间最小跳段距离的总和;(5) 接收信号传播时间差(Time Difference of Arrival,TDOA):信号传输过程中,同时发出的两种不同频率的信号到达同一目的地时由于不同的传输速度所造成的时间差;(6) 接收信号传播时间(Time of Arrival,TOA):信号在两个不同节点之间传播所需要的时间;(7) 信号返回时间(Round-trip Time of Flight,RTOF):信号从一个节点传到另一个节点后又返回来的时间;(8) 到达角度(Angle of Arrival,AOA):节点自身轴线相对于其接收到的信号之间的角度;(9) 接收信号强度指示(Received Signa1 Strength Indicator,RSSI):无线信号到达传感器节点后的强弱值。
利用测绘技术实现室内精准定位的方法与技巧
利用测绘技术实现室内精准定位的方法与技巧在现代社会中,人们对于室内定位的需求越来越迫切。
无论是在商场、机场、医院还是大型会展中心,精准的室内定位技术可以为用户提供更便利的导航服务,提高行业运营效率。
传统的GPS定位技术只能在室外环境下使用,而当用户进入室内空间时,无法获得准确的位置信息。
因此,利用测绘技术实现室内精准定位成为一个热门的研究方向。
本文将介绍一些常见的测绘技术,并探讨室内定位的一些实现方法与技巧。
一、激光扫描技术激光扫描技术是一种非常精准的测绘技术,可以实现对室内空间的高精度三维扫描。
这项技术通过使用激光仪器对空间进行扫描,并记录下激光在空间中的反射情况。
通过分析反射数据,可以生成准确的空间模型,包括墙壁、家具以及其他常见的室内结构物。
在基于激光扫描的室内定位中,可以利用这些生成的空间模型,通过分析用户位置与周围环境的关系,来判断用户的精确位置。
激光扫描技术在室内定位中精度较高、稳定性好,并且可以适用于各种室内环境。
二、无线传感网络技术无线传感网络技术是一种基于无线信号传输的室内定位方法。
该技术利用在室内空间布置的传感器节点,通过检测用户所产生的无线信号的强度、时延等信息来确定用户的位置。
无线传感网络在室内定位中的应用范围非常广泛,可以利用现有的Wi-Fi网络、蓝牙等技术,通过在室内布置一定数量的传感器节点,来实现用户的定位需求。
与之前的激光扫描技术相比,无线传感网络技术的实施成本较低,同时也能够较好地适应各种室内环境。
三、地磁定位技术地磁定位技术是利用地球磁场的变化情况来确定用户位置的一种方法。
地球的磁场在不同的地点、不同的时间都存在微弱的变化,而这些变化可以通过合适的传感器进行检测和记录。
地磁定位技术通过收集用户所处位置的地磁数据,与预先建立的地磁数据库进行对比,来确定用户的位置。
与其他室内定位技术相比,地磁定位技术对硬件设备的要求较低,可以利用智能手机等设备上的传感器来实现定位,因此应用范围较广泛。
无线传感器网络在室内定位中的应用实践
无线传感器网络在室内定位中的应用实践随着科技的不断发展,无线传感器网络(Wireless Sensor Network,WSN)已经逐渐成为了众多应用领域的重要技术手段。
其中,室内定位应用是WSN的一大重要领域。
本文就将从WSN 的特点和室内定位的需求出发,探讨WSN在室内定位中的应用实践。
一、WSN的特点WSN是指由大量节点组成的分布式传感器网络系统,每个节点都具有感知、处理和通信等能力。
WSN的特点主要有以下几个方面:1、高度分布式:无线传感器网络由大量节点组成,分布在不同的地方。
节点之间往往相互依赖,而且每个节点都有着相似的传感器和数据采集功能,使得网络具有高度分布式特性。
2、自组织、自适应:WSN节点之间没有固定的线路连接,数据通过网络中的节点进行传递。
每个节点都能够感知它周围的环境,并通过这些感知数据实现相应的网络自组织和自适应。
3、资源有限:无线传感器网络的节点电量、存储空间、带宽等资源都非常有限。
由于这些限制,节点往往只能进行少量的计算和资源消耗。
二、室内定位的需求室内定位是一种基于无线定位技术和无线传感器网络的定位技术。
室内定位技术的出现主要是因为GPS等定位技术无法在室内定位,而室内定位技术可以解决这个问题。
室内定位技术普遍应用于如下领域:1、监控:室内定位技术可以对室内实现实时监控,有助于抢救等情况的发生,同时还可以在安全生产中起到重要作用。
2、导航:人们在地下室、超市等环境中找到自己的位置往往会比较困难,而室内定位技术可以解决这个问题。
3、游戏:游戏企业可以根据玩家的位置和行为在游戏中生成更有趣的游戏内容。
三、WSN在室内定位中的应用实践1、WSN在位置推算中的应用室内定位系统使用无线传感器网络在室内建立信标网络,然后利用推算算法计算目标物体在室内的位置。
在距离定位中,要想确保准确性,需要确保每个节点的位置和节点间的距离相对稳定。
因此,在安装的过程中要精确测量节点与节点间的距离,同时还要考虑节点的位置分布和随机噪声等因素的影响。
无线传感器网络DV-Hop定位算法的研究的开题报告
无线传感器网络DV-Hop定位算法的研究的开题报告I.课题背景与意义随着无线网络技术的发展,无线传感器网络已成为研究热点之一。
无线传感器网络的一项重要应用就是对目标位置进行定位,但是受到无线信号传播的不稳定性、传感器节点位置误差和网络拓扑结构的限制等因素的影响,节点定位精度难以保证。
因此,设计一种高精度的节点定位算法成为无线传感器网络中的研究热点。
传感器网络中的DV-Hop算法是一种经典的定位算法,其原理简单,适用于多种拓扑结构,并且具有较好的定位精度。
因此,本文研究无线传感器网络中DV-Hop定位算法,进一步提高节点定位精度,适应网络中不同的应用场景。
II.研究现状及发展动态近年来,越来越多的研究关注无线传感器网络的节点定位问题。
目前,相关研究主要集中在DV-Hop算法、MDS-MAP算法、半监督学习算法等方面。
其中,DV-Hop算法因其原理简单、易于实现,在无线传感器网络中得到了广泛的应用。
但随着网络规模的增大,节点间距离的误差也会随之增大,影响定位的精度。
因此,如何减少节点定位误差是当前研究的重点。
III.研究对象与内容本文研究对象为无线传感器网络中的DV-Hop节点定位算法。
具体研究内容包括以下三个方面:1.分析DV-Hop算法的原理和定位误差来源,探究其局限性。
2.通过增加节点之间的通信次数,设计一种改进的DV-Hop算法,来提高节点定位精度。
3.在NS2平台上实现算法,并对其进行性能测试,评估改进后算法的可行性和有效性。
IV.研究方法和技术路线本文将采用理论分析与仿真实验相结合的方法,进行研究。
主要包括以下技术路线:1.对DV-Hop算法进行分析,研究其误差来源,并探究提高算法精度的途径。
2.设计改进的DV-Hop算法,并进行相关的数学建模和理论分析。
3.在NS2模拟平台上实现算法,并进行性能测试。
4.对实验结果进行分析和总结,评估改进后算法的可行性和有效性。
V.预期研究成果本文预期研究成果包括以下方面:1.研究了无线传感器网络中DV-Hop节点定位算法的原理,探究其定位误差来源和局限性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于定位一般的理解就是确定位置。
在无线传感网中,定位是指网络通过特定的方法确定节点的位置信息。
其可分为节点的自身定位和目标定位。
节点自身定位是确定网络中节点位置坐标的过程,它是网络自身属性的确定过程,是网络的支撑,可以通过人工配置或各种节点自定位算法完成; 目标定位是指在网络覆盖范围内确定一个事件或一个目标的位置坐标,这可以通过把位置已知的网络节点作为参考节点来确定事件或目标在网络中所处的位置。
无线传感网定位问题就是寻求利用少量的锚节点来确定网络中未知节点的位置坐标的方法。
无线传感网中,传感器节点的可靠性差、能量有限、节点数量庞大且节点部署具有不确定性等,这些限制因素对定位技术提出了更高的要求。
通常无线传感网定位技术具备以下特点:①自组织性通常无线传感网中的节点是随机布设的,不能依靠全局的基础设施的协助确定每个节点的位置所在。
因此,自组织性就显得格外重要。
②容错性传感器节点的硬件配置低、处理能力弱、可靠性差、能量少以及测距时会产生误差等因素决定了传感器节点本身的脆弱性,因此定位算法必须具有良好的容错性。
③能量高效性为了尽量延长网络的生存周期,要尽可能的减少节点间的通信开销,减少算法中计算的复杂度,用尽量少的能量完成尽可能多的工作。
④分布式计算每个节点自己对自身的位置进行估算,不需要将所有信息传送到某个特定的节点进行集中计算。
For a general understanding of the positioning is to determine the location. In wireless sensor networks, localization refers to the network to determine the node location information by a specific method. It can be divided into self-positioning and targeting nodes. Node positioning itself to determine the location coordinates of nodes in the network process, which is the process of determining the properties of the network itself, is to support the network, you can manually configure various nodes or self-localization algorithm is complete; the goal is to determine the location within the network coverage an event or position coordinate of an object, which can be known by the location of the network node as a reference node to determine the event or target location in the network. Wireless sensor network localization problem is to seek the use of a small amount of anchor nodes in the network to determine the location coordinates of the unknown node approach.Wireless sensor networks, sensor nodes poor reliability, energy is limited, a large number of nodes and node deployment uncertainties and other factors which limit the positioning technology has put forward higher requirements. Wireless sensor network positioning technology usually have the following characteristics:① self-organizationTypically Wireless Sensor Network nodes are randomly laid, can not rely on a global infrastructure assistance to determine the location where each node. Thus, self-organization is particularly important.② fault toleranceHardware configuration of the sensor nodes is low, the processing capacity is weak, poor reliability, less energy and will produce an error and other factors that determine the vulnerability of the sensor node itself when ranging, so the localization algorithm must have good fault tolerance.③ energy efficiencyIn order to try to extend the lifetime of the network, to minimize the communication overhead between nodes, reducing the complexity of the algorithm calculated as few as much energy to complete the work.④ Distributed ComputingEach node's own estimate of its own position, without the transfer of all information to a particular node centralized computing.无线智能传感网主要由终端节点、协调器和上位机组成,其中终端节点和协调器需要进行硬件设计,上位机选用一台个人电脑。
终端节点是网络的最底层,其负责感知信号并与协调器通信,对应于IEEE1451 标准中定义的智能变送器模块。
协调器是网络中协调终端节点和上位机的中间层,既要与终端节点通信,又要支持TCP/IP 协议接入局域网允许上位机与其通信,还要具有本地数据存储等能力,其对应于IEEE 1451 标准中定义的网络适配器模块。
无线智能变送器对应的网络中的终端节点,其主要作用包括数据的采集和传输。
数据的采集需要通过传感器感知,随着科技的发展,对于传感器的设计已日渐丰富和成熟,而且本文主要针对对象是无线智能传感网的设计,所以对传感器的设计不做介绍,硬件单元的重点放在了数据的传输部分,但对传感器单元留有数字通信接口,支持不同传感器的接入。
一个微处理器的最小系统设计的例子。
STM32F103 系列微处理器采用ARM 的Cortex-M3 内核,它是ARM 系列新一代的低功耗嵌入式ARM 处理器,它为替代单片机的需要提供低成本的应用平台。
相比其他系列ARM 处理器,Cortex-M3 内核系列提供了更优越的计算性能和更先进的中断响应系统,并且在低功耗属性上表现的更加优越。
STM32F103 系列采用Cortex-M3 内核,它是32 位的RISC 结构,兼容所有的ARM 工具及软件。
Wireless intelligent sensor network consists of terminal nodes, the coordinator and the host computer, of which the terminal node and coordinator needed hardware design, the choice of a PC personal computer. Terminal node is the lowest level of the network, which is responsible for sensing signals and communicate with the coordinator, corresponding to the IEEE1451 standard defined smart transmitter module. The coordinator is the middle layer of the network coordination and PC terminal nodes, both to communicate with the terminal node, but also supports TCP / IP protocol to allow access to the LAN to communicate with the host computer, but also with local data storage capacity, which corresponds to IEEE 1451 network adapter module defined in the standard.Wireless Intelligent Transmitter corresponding terminal nodes in the network, and its main role, including the collection and transmission of data. Data collection requiredby the sensor perception, along with the development of technology for the design of the sensor has been increasingly rich and mature, and this paper is focused on the object of wireless smart sensor network design, so the sensor does not describe the design of the hardware unit focused on the portion of the data transmission, but leave the sensor unit the digital communication interface to support access different sensors. Minimum system a microprocessor design examples. STM32F103 series microprocessor with ARM's Cortex-M3 core, it is a new generation of low-power ARM family of embedded ARM processor, which provides low-cost alternative application platform for microcontroller needs. Compared to other series of ARM processors, Cortex-M3 core family provides superior computing performance and more advanced interrupt response systems, and in the low-power performance is more superior properties. STM32F103 series with Cortex-M3 core, it is a 32-bit RISC architecture, compatible with all ARM tools and software.。