直流电动机的起动仿真
直流电动机起动实验

实验一直流电动机起动实验一、实验目的理解直流电机的工作原理,测试直流电动及直接起动的波形。
说明负载转矩、转速、电流、电磁转矩之间为何具有相应的对应关系。
二、实验的主要内容仿真一台直流并励电动机的起动过程。
电动机参数为: PN =17kW, U N = 220V, n0= 3000r/min,电枢回路电阻R a =0. 0870,电枢电感La =0. 0032H,励磁回路电阻RF=181.50,电机转动惯量J=0.76 kg ?m2。
三、实验的基本原理直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
四、实验步骤1) 建立并激电动机的仿真模型:直流电动机DCmotor 的电枢和励磁并联后由直流电源DC 供电,用Step 模块给定电动机的负载转矩,在DCmotor 的m 端连接了Demux 模块,将m 端输出的4 个信号分为4 路,以便通过示波器Scope 观察,m 端输出的转速单位为rad/s,这里使用了一个放大器(Gain), 将rad/s 转换为习惯的r/min,变换系数为:k=60/2 π =9.55。
2) 计算电动机参数:励磁电流励磁电感在恒定磁场控制时可取“ 0” 电枢电阻R a =0.0870电枢电感估算3)设置仿真参数:在Simulation 菜单栏下选择Simulation parameters, 设置仿真参数,仿真时间取ls,在0. 5s 时加额定负载,仿真算法取ode45,点击菜单栏中的“? ”按钮启动仿真。
直流电动机起动实验
F 实验一直流电动机起动实验一、实验目的理解直流电机的工作原理,测试直流电动及直接起动的波形。
说明负载转矩、转速、电流、电磁转矩之间为何具有相应的对应关系。
二、实验的主要内容仿真一台直流并励电动机的起动过程。
电动机参数为: PN =17kW, UN=220V, n0= 3000r/min,电枢回路电阻Ra=0. 0870,电枢电感La =0. 0032H,励磁回路电阻R =181.50,电机转动惯量J=0.76 kg •m2。
三、实验的基本原理直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。
一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。
由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。
四、实验步骤1)建立并激电动机的仿真模型:直流电动机DCmotor 的电枢和励磁并联后由直流电源DC 供电,用Step 模块给定电动机的负载转矩,在DCmotor 的m 端连接了Demux 模块,将m 端输出的4 个信号分为4 路,以便通过示波器Scope观察,m 端输出的转速单位为rad/s,这里使用了一个放大器(Gain), 将rad/s 转换为习惯的r/min,变换系数为:k=60/2π =9.55。
2)计算电动机参数:励磁电流励磁电感在恒定磁场控制时可取“0”电枢电阻电枢电感估算R a=0.08703)设置仿真参数:在Simulation 菜单栏下选择Simulation parameters, 设置仿真参数,仿真时间取ls,在0. 5s 时加额定负载,仿真算法取ode45,点击菜单栏中的“➢”按钮启动仿真。
(完整版)直流电动机建模及仿真实验
动态系统建模仿真实验报告姓名:学号:联系方式:(Tel)(Email)2010年11月11日目录1直流电动机建模及仿真实验 (1)1.1实验目的 .............................................................................................................. 1 1.2实验设备 .............................................................................................................. 1 1.3实验原理及实验要求 .......................................................................................... 1 1.3.1实验原理 ....................................................................................................... 1 1.3.2实验要求 ....................................................................................................... 2 1.4实验内容及步骤 .................................................................................................. 3 1.4.1求电动机的传递函数模型和频率特性 ....................................................... 3 1.4.2设计Simulink 框图求电机的调速特性 ....................................................... 5 1.4.3设计Simulink 框图求电机的机械特性 ....................................................... 7 1.4.4求电机转速的阶跃响应和机电时间常数 ................................................... 8 1.5实验结果分析 . (10)2考虑结构刚度时的直流电动机-负载建模及仿真实验 (11)2.1实验目的 ............................................................................................................ 11 2.2实验设备 ............................................................................................................ 11 2.3实验原理及实验要求 ........................................................................................ 11 2.3.1实验原理 ..................................................................................................... 11 2.3.2实验要求 ..................................................................................................... 13 2.4实验内容及步骤 ................................................................................................ 13 2.4.1求从a u 到m θ的传递函数模型和频率特性 ................................................ 13 2.4.2求从m θ到L θ的传递函数模型、频率特性和根轨迹 ............................... 15 2.4.3求不同刚度系数对应的从a u 到L θ的电机-负载模型的频率特性 ........... 17 2.5实验结果分析 . (18)1直流电动机建模及仿真实验1.1实验目的(1)了解直流电动机的工作原理; (2)了解直流电动机的技术指标; (3)掌握直流电动机的建模及分析方法;(4)学习计算直流电动机频率特性及时域响应的方法。
直流电动机的起动仿真
实验五直流电动机的起动仿真实验目的:直流电机直接起动时,起动电流很大,可达到额定电流的10-20倍,由此产生很大的冲击转矩,实际运行时不允许直流电机直接起动。
通过直接起动和串电阻起动比较它们的区别,起动电流和起动转矩的变化。
实验设备及器件:计算机,一台(MATLAB)。
实验内容:建立仿真模型;通过图形验证。
实验要求:能够正确使用simulink建立仿真模型,并观察分析图形。
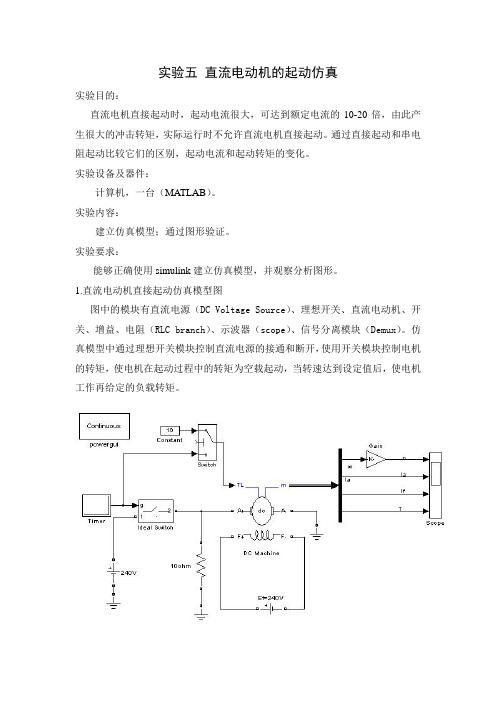
1.直流电动机直接起动仿真模型图图中的模块有直流电源(DC Voltage Source)、理想开关、直流电动机、开关、增益、电阻(RLC branch)、示波器(scope)、信号分离模块(Demux)。
仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。
直流电机模块参数:直流电源模块参数:定时模块:0s时输出为0, 0.5s时输出为1理想开关:开关模块:增益模块常量模块:电阻设置:仿真时间为5s2.直流电动机电枢串电阻起动仿真与图1仿真模型相比较图中增加了电阻控制模块子模块的建立采用从Simulink中拖入子系统模块(Subsystem)的方法。
双击子模块打开在内部按下图增加所需要的模块,如增加输入、输出端口(connection port),子模块的原理图如下图所示。
子模块中有阶跃模块(Step)、断路器(Breaker)、阻抗分支(RLC branch)组成。
开关门限的设置:即转速到1400r/min时再投入负载转矩。
仿真时间为10s。
直流电机的建模与仿真
function [dx]=fx(x,nc) L=1.5; J=0.25; kr=0.4; Ri=0.2; ki=2.2; kn=0.00015; u=220; kp=4; kd=7; i=x(1); n=x(2);
x=[i,n]'; dn=(ki*i-kn*n^2)/J; du=kd*(kp*(nc-n)-dn); di=-(Ri*i+kr*n-du)/L; Uc=du; if(Uc>0) Uc=u; end if(Uc<0) Uc=0; end dx(1)=di; dx(2)=dn;
电机系统的仿真
MATLAB仿真的源程序: function dj() dt=0.02/6; x=[0;0]; y=x; t=0; nc=1000; for i=1:2000 t=[t i*dt]; xy=[y,x]; end figure plot(t,y,'LineWidth',2);
建模与仿真作业
—— 电机转速的动态特性分析
模型描述
直流电机电路图 i
电机电枢回路的电路方程是:
di U Ri i L K R n dt
反电势E
其中:U是加在电机两端的电压; Ri是电机回路的总电阻 L是电枢回路总电感 i是电枢回路电流 已知电枢回路的转动惯量是J, 开关变量由PWM波的占空比来控制
电机转速的动态仿真曲线
仿真曲线图
电机转速的动态特性总结
通过电机的状态空间数学模型以及电机的MATLAB仿真图形, 我们可以知道: 电机启动时电流迅速增大,达到最大值后又下降,当转速上 升到给定的转速时,电流值趋于稳定,不再发生变化,同时电机的 转速也达到稳定。
转速n
电机双闭环调整系统的动态结构图
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
直流电动机串联电阻启动的matlab模型分析

直流电动机串联电阻启动的模型(计算+仿真)电动 参数如下:17,220,3000/min N N N P kw U V n r ===,电枢回路电阻0.087a R =Ω,电感0.0032a L H =,励磁回路电阻0.087F R =Ω,电动机的转动惯量20.76.J Kg m = 构建电路模型参数设置:1、0.087a R =Ω,0.0032a L H =2、0.087F R =Ω,励磁电感在恒定磁场控制时取0,即0F L H =3、互感af L :首先电动势常数0.0708.min/N a N e NU R I C V r n -== 600.6762e e K C π== /0.676/1.210.56af e f L K I H ===(220/ 1.21f F I R A ==)4、20.76.J Kg m =采用ode45算法既可以得到仿真曲线从仿真图线上可以看出,直接启动时,启动电路达到2500A,这个值实在是太大了。
为了降低启动电流值,我们采用串联电阻的方式,而且,在这里要求启动过程中,电路要在100-200A之间变化。
1、启动时电路小于200A11 200NaUR R=-=Ω此时,我们在电路中先接入11 200NaUR R=-=Ω,看一下仿真曲线可以看到在3.5s的时候电流降到了100A,这时候转速达到了1500r/min2、这个时候需要降低电阻,降到多少呢,计算如下20.482200N e a U C n R R -=-=Ω。
这时候我们安排110.4820.518R =-=Ω,在0-3.5s 接入电路20.482R =Ω ,在0-10s 接入电路(暂定)可以看出大概在6s 的时候电路又来到了100A,转速2200r/min 计算: 30.32200N e a U C n R R -=-=Ω 这个时候我们安排110.4820.518R =-=Ω在0-3.5s 接入电路20.32R =Ω 在0-6s 接入电路30.4820.320.162R =-=Ω,在0-15s 接入电路大概在8s 的时候电流有到100A,转速2800r/min 这时候可以完全释放电阻了。
新直流电动机(NewDCM)的仿真模型

CHEN i x a g M ng in ,L U , W ANG n pe I Yu Zo g i
( . o eeo l tcl n i ei Z ea g U i r t, a gh u3 0 2 , hn ; 1 C lg l fEe r a gn r g, h in nv sy H n zo 10 7 C i ci E e n j ei a
2 .珠 海 运 控 电机 有 限公 司 ,广 东 珠 海
30 2 ; 107
590 ) 10 0
摘
要 :在简要介绍 了九换 向单元新直流 电动机 ( e C N w D M)工作 原理 的基 础上 ,建立 了九换 向单元 N w D M的 e C
数学模型和基于 s l k的仿真模 型 ,对 电机的机械特性和换 向单元 电流进 行 了仿 真分析 ,实验结果 验证 了仿 真模 i i mu n 型的正确性 。通过对换 向单元 电流波形的分析 ,指 出 了电子换 向器 的结 构对 N w D M换 向过程 的影 响 ,为深 入研 e C
内完 成 ,对 主 电路 几 乎 不 影 响 ,忽 略 换 向 回和大容量方 向发展时也
受 到 限制 ,成 为它 固有 的 弱 点 。现 代 无 刷 直 流 电动
机 ( L C 没有 滑 动 电接 触 ,具 有 调 速 方 便和 转 矩 B D M)
过程 ,电动机的模 型非常简单 。N w D M具有与传 e C
2 Z u a t nC nrl t o ,Ld , h h i u n d n 10 0 hn . h h i i o t o C . t. Z u a G a g o g5 9 0 ,C ia) Mo o o Mo r
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五直流电动机的起动仿真
实验目的:
直流电机直接起动时,起动电流很大,可达到额定电流的10-20倍,由此产生很大的冲击转矩,实际运行时不允许直流电机直接起动。
通过直接起动和串电阻起动比较它们的区别,起动电流和起动转矩的变化。
实验设备及器件:
计算机,一台(MATLAB )。
实验内容:
建立仿真模型;通过图形验证。
实验要求:
能够正确使用simulink建立仿真模型,并观察分析图形。
1•直流电动机直接起动仿真模型图
图中的模块有直流电源(DC Voltage Source )、理想开关、直流电动机、开
关、增益、电阻(RLC bran ch)、示波器(scope)、信号分离模块(DemuX。
仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。
直流电机模块参数:
直流电源模块参数:
定时模块:0s时输出为0, 0.5s时输出为1
limaT (mask) Cliitk)
tenerat es 良siEnal chan.Ei.nE at speci f 1 ed times.
If a si£nal value i z not 雪p腔亡i于i 皀d &t t ime zero^ the outpul: i3 kept at 0 unt i1 the f i rst specifi ed t ransi tion time.
-P&rametsis
T?me ® ____________________________________________________________________________ |[ 0 0. 5 ]
AltDl ftudft:
[Eo i J
QK Cancel Kelp Apply
理想开关:
开关模块:
—Siffi t ch -------------------------------------------------------------------------------------------------------------------------------------- Pass tkroiLiEh injhut 1 呱堆n intuit 2 ixfi电!s. the: sei t &d cri terion: othejrwi.
D生壬弓tElDUEh 3. The i&rut E赴I T电numbSii■电江to® to hot tom (or 1 &f t to fitRt).
The injut 1 pas E_throueh criteria are input 2 greater than or equa 1 E reat ei- tiiazxji or not eqroal 七口t he thre shiiol d. The f i r st and third inpiit piort s are 4+鱼port s A皐巩d the second input port is the conf rol port.
Wain I £i 評』电types
Criteria for pas^ine f i rst input; I u2 》=ThrsshDld
Threshold:
|iooo
» EnAble zero erossiiiE. detection
S«mpl & time 〔一1 for inherit«<£)':
增益模块
Apply
ZJ
常量模块:
电阻设置:
仿真时间为5s
2.直流电动机电枢串电阻起动仿真
与图1仿真模型相比较图中增加了电阻控制模块
子模块的建立采用从Simulink中拖入子系统模块(Subsystem)的方法。
双击子模块打开
在内部按下图增加所需要的模块,如增加输入、输出端口( conn ection port),子模块
的原理图如下图所示。
子模块中有阶跃模块( Step)、断路器
(Breaker )、阻抗分支(RLC bran ch)组成。
T IE电f
Coritinuous
powergun
In out
Gain
Idwml
Siwitph
Subsystenn
1Oohm
Machine
Va Va2
E^240V
貝
二
IJ ------------- ------------------------- F
It
------------- r
T
------
A
Swpe
Breaker
B(ejkei2
3^9 ohm
——
1.64 ohm0.74 ohm
■ ■Mt
开关门限的设置:即转速到1400r/min时再投入负载转矩
Switch
內舗through input 1 啊伽input 2 sadsfiei the selected criterion; otherwise,呻$ through input 3. The inputs are numbered top to bottom (ar left to right] The input 1 pass-thraugh criteria are input 2 grealer than or equal greater than,, or ml equal to the threshold. T he first and! third input ports are data parts, ariid the second input port is the control port.
Main Signd Data Types
Giteria for passing first input: u2 >= Threshold v Threshold:
uoo
[3 Enable zero crossing detection
S ample Nme (-1 for irheriled):
OK Cancel Help Apply。