电力拖动Matlab仿真实验指导书剖析
牵引电机MATLAB仿真解析

牵引电机试验线路及原理简介电力机车牵引电机试验台的原理线路图如图5-1所示:图中1、2是被、陪试电机,由LJ 作同轴连接。
感应调压器GT 和整流器ZL 构成“线路发电机”提供试验电机端电压U ;SY 是一个专用的相控整流器,称为“升压机”,用于提高陪试机支路电压,使其作为发电机运行,提供负载试验电流,其两端电压为U s 。
LF 1、LF 2分别是电机1和电机2的串激绕组;H 1、H 2分别是电机1和电机2的换向绕组。
图5-1 试验线路图 现将线路的工作原理简述如下:当调节升压机相控角α使得E s =0时,电机1、2都是在电网电压U 下空载运行的电动机,由电源输送空载电源I 0及I '0(如图虚线所示方向),由于1和2两电机机械耦合,其转速相同,而且激磁绕组串于同一支路,激磁电流相等,因此,两电机的电势E 1和E 2相等,且小于电网电压U 。
当调节升压机相控角α使得E s 与E 2同向且二者之和大于U ,则Es 在机电2及1的输入送了电流I',这时在电机2的支路中总电流为2I I I '-'= 而在电机D 的支路中总电流为1I I I '+'= I 1与I 2的电流方向如图中所示,按照图中所示的极性,I 1的方向与E 1方向相反,1作为电动机运转;I 2的方向与E 2方向相相同,电机2作为发电机运转。
因此,决定该电机负载(制动力)的大小的电流I 2为()222R UE E I S -+=式中,R 2为电机2的电枢、换向极及补偿绕组的电阻。
如上所述,此线路的升压机SY 的作用可归结为:如没有升压机,则作为负载电机(陪试机)的电机2就不可能作为发电机运转。
当升压机E S 过低时,可能使E S +E 2≤U ,这时电机1与2就是处于空载状态下的串激电动机,它们将处于飞速状态,因此,在试验过程中,过分调大升压机的相控角α是不允许的。
试验起动过程是:先调高线路机输出电压(不超过试验电机的30%),使机组成并联电动机运行,然后调节升压机增加负载电流,再调节线路机电压、再调节升压机调整负载电流,直到需要的试验值为止。
毕业论文-MATLAB直流电机拖动的仿真探究
摘要仿真是对操控系统的参考,探究和实验有着重要的含义,MATLAB编写的语句以及simulation元器件可以进行操控系统仿真,本人用MATLAB最新版本的软件来,写出些经典的直流操控系统实行了模拟实验,出现了不一样模型的图形,对系统做的两种状态的性能实验检查。
对一样的直流电机调节速度系统,可以抽取有传函模行建立系统模形方针,根据电汽构图中建立混在一块的模块系统模形仿真和编写仿真,并阐述了各种方法的特点。
对数字pid掌握算数实行的参考,里面有容易地数字pid掌握算数和不全部积分式,微分分离式两种进行的数字PID掌握算法,探讨了利用仿真技术整理计算机掌握直流电机系统的采样时间和PID参考的方法,以获得优良的系统调速性能。
关键词:MATLAB;仿真;直流电机;调速ABSTRACTSimulation is the reference of control system, has important meaning to explore and experiment, MATLAB statements and simulation components can control system simulation, I use the latest version of the MATLAB software to write some classical dc control system implemented simulation experiment, the different model of graphics, experiments on the performance of the system to do two kinds of state inspection. The dc motor speed regulating system of the same, you can extract a transfer function model line set up system modeling approach, according to the building up of mixed vapor composition in which a module of system modeling simulation and simulation, and expounds the charac teristics of various methods.Reference in digital pid control arithmetic to somewhere inside change of digital pid control arithmetic and not all integral type, differential separate two kinds of digital pid control algorithm, discusses the use of simulation technology of computer control dc motor system sampling time and the method of pid reference, in order to obtain excellent speed regulating performance.Key Words:MATLAB;simulation;DC machine;speed regulation目录摘要 ............................................................................................................................................... I ABSTRACT ..................................................................................................................................... II 目录 . (1)1 绪论 (3)1.1研究的目标与内容 (4)2 MATLAB简介 (5)2.1 MATLAB的发展历程 (5)2.2 MATLAB平台的组成 (6)2.3 MATLAB语言的特点 (7)3 MAT LAB软件在操制系统中的仿真 (9)3.1计算机仿真技术概括 (9)3.2 计算机仿真基本概念 (9)3.3自动控制系统仿真 (9)3.4 MAT LAB在控制系统地仿真功能和含义 (10)3.5控制系统仿真里面常用的函数 (10)4 Simulink基础 (12)4.1 Simulink简介 (12)4.2常用的标准模块 (12)4.3 Simulink主要的仿真模块介绍 (14)5直流电动机直接启动仿真 (16)5.1建立仿真模型 (16)5.2模块参数设置 (16)5.3仿真参数设置 (20)5.4仿真 (20)6直流电动机在电枢串联电阻起动仿真 (22)6.1建立仿真模型 (22)6.2模块参数设置 (23)6.3仿真参数设置 (23)6.4进行仿真 (23)7直流电动机反接制动仿真 (25)7.1建立仿真模型 (26)7.2模块参数设置 (26)7.3仿真参数设置 (26)7.4仿真 (26)8 直流电动机改变励磁电流调速仿真 (28)8.1建立仿真图形 (28)8.2模块参数设置 (28)8.3仿真参数设置 (29)8.4仿真 (29)9直流电动机改变电枢电压调速仿真 (31)9.1建立仿真模型 (31)9.2模块参数设置 (33)9.3仿真参数设置 (33)9.4仿真 (33)10 晶闸管单环直流调速系统的MATLAB仿真................................................ 错误!未定义书签。
matlab仿真实验指导书

计算机仿真及应用实验指导书电气与电子信息工程学院实验一 S 函数实现单摆运动一、实验目的掌握S 函数的定义、功能模块调用方法、工作原理及应用场合。
二、预习及思考1、S 函数应用于哪些场合?2、S 函数的子程序是如何调用的?三、实验步骤在建立实际的S-函数时,可在该 模板必要的子程序中编写程序并输入参数便可。
S-函数的模板程序位于toolbox/simulink/blocks 目录下,文件名为sfuntmpl.m ,可以自己查看。
在运用S-函数进行仿真前,应当自行编制S-函数程序,因此必须知道系统在不同时刻所需要的信息:(1)在系统开始进行仿真时,应先知道系统有多少状态变量,其中哪些是连续变量,哪些是离散变量,以及这些变量的初始条件等信息。
这些信息可通过S-函数中设置flag=0获取。
(2)若系统是严格连续的,则在每一步仿真时所需要的信息为:通过flag=1获得系统状态导数;通过flag=3获得系统输出。
(3)若系统是严格离散的,则通过flag=2获得系统下一个离散状态;通过flag=3获得系统离散状态的输出。
单摆示意图:单摆的状态方程从MATLAB 的toolbox\simulink\blocks 子目录下,复制sfintempl.m ,并把它改名为simpendzzy.m ,再根据状态方程对文件进行修改,最后形成文件。
构成名为simpendzzy 的S-函数模块从simulink 的“user -defined Function ”子库中复制S-Function 框架模块到空白模型窗,如图所示。
m 121sin d g x K x K ux x θ=--+=双击S-Function框架模块,弹出下图所示对话窗;在“S-Function name ”栏中填写函数名simpendzzy;在“S-Function parameters”栏中填写函数simpendzzy.m的第4、5、6、个输入宗量名dampzzy,gngzzy(次序要对);再点击【OK】,就得到单摆S-函数模块,如图所示。
电力拖动自动控制系统Matlab仿真实验报告模板

电力拖动自动控制系统Matlab仿真实
验报告
电力拖动自动控制系统
---Matlab仿真实验报告
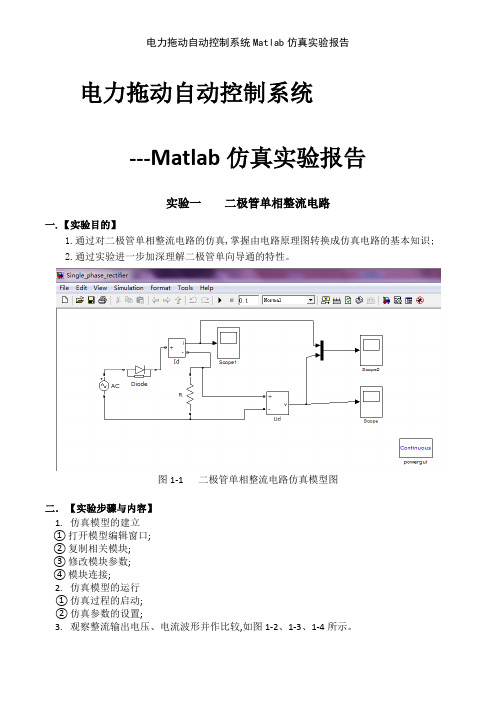
实验一二极管单相整流电路一.【实验目的】
1.经过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.经过实验进一步加深理解二极管单向导通的特性。
图1-1 二极管单相整流电路仿真模型图
二.【实验步骤和内容】
1.仿真模型的建立
①打开模型编辑窗口;
②复制相关模块;
③修改模块参数;
④模块连接;
2.仿真模型的运行
①仿真过程的启动;
②仿真参数的设置;
3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】
由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2 整流电压输出波形图图1-3 整流电流输出波形图
图1-4 整形电压、电流输出波形图
实验二三相桥式半控整流电路
一.【实验目的】
1.经过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;
2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】
1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块
参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:
(1)交流电压源参数U=100 V,f=25 Hz,三相电源相位依次延迟120°。
电力拖动自动控制系统实验报告
电力拖动自动控制系统仿真实验报告课程名称:电力拖动自动控制系统课程编号:年级/专业/班:姓名:学号:任课老师:实验总成绩:电力拖动自动控制系统仿真实验报告实验项目名称:转速反馈控制直流调速系统实验指导老师:一、实验目的:1、进一步学习利用MA TLAB下的SIMULINK来对控制系统进行仿真。
2、掌握转速、电流反馈控制直流调速系统的原理。
3、学会利用工程的方法设计ACR、ASR调节器的方法。
二、仿真实验电路模型:比例积分控制的无静差直流调速系统的仿真模型三、实验设备及使用仪器:安装windows系统和MATLAB软件的计算机一台四、仿真实验步骤(按照实际建模操作过程填写):1、打开模型相关编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选择File —New—Model菜单项实现。
复制相关原器件:双击所需要子模块图标,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
2、模块连接:以鼠标左键单击起点模块输出端,拖动鼠标至终点模块输入端处,则在两模块间产生—>线。
修改相关参数:双击模型图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。
3、仿真过程的启动:单击启动仿真工具的按钮或选择Simulation—Strat菜单栏,则可启动仿真过程,再双击Scope模块就可以显示仿真结果。
4、仿真参数的设置:为了清晰地观测仿真结果,需要对示波器显示格式作一个修改,对示波器的默认值注意改动,这里把Strat time和Stop time栏分别填写仿真的起始时间和结束时间,把默认时间从10.0s修改为0.6s。
重新启动仿真。
5、调节其参数的调整:根据工程的要求,选择一个合适的PI参数。
Kp=0.25,1/t=3,系统转速的相应无超调,但调节时间很长;当Kp=0.8,1/t=15,系统转速的相应的超调较大,但快速性较好。
五、实验数据、图表或计算等:修改控制参数后的仿真结果Kp=0.25,1/t=3,系统转速的相应无超调,但调节Kp=0.8,1/t=15,系统转速的相应的超调较大,但快速性较好。
电力电子的matlab仿真实验指导书(改)

“电力电子”仿真实验指导书MATLAB仿真实验主要是在simulink环境下的进行的。
Simulink是运行在MATLAB环境下,用于建模、仿真和分析动态系统的软件包。
它支持连续、离散及两者混合的线性和非线性系统。
由于它具有直观、方便、灵活的特点,已经在学术界、工业界的建模及动态系统仿真领域中得到广泛的应用。
Simulink提供的图形用户界面可使用鼠标的拖放操作来创建模型。
Simulink本身包含sources、sinks、Discrete、math、Nonlinear和continuous 等模块库。
实验主要使用Sinks、Sources、Signals & System和Power System Blockset这四个模块库中的一些模块搭建电力电子课程中的典型电路进行仿真。
在搭建成功的电路中使用scope显示模块显示仿真的波形、验证电路原理分析结果。
这些典型电路包括:1)单相半波可控整流电路(阻性负载和阻感负载)2)单相全控桥式整流电路(阻性负载和阻感负载)3)三相全控桥式整流电路(双窄脉冲阻性负载和双窄脉冲阻感负载)4)降压斩波电路、升压斩波电路5)三相半波逆变电路、三相全波逆变电路。
一、matlab、simulink基本操作多数学生在做这个实验是时候可能是第一次使用matlab中的simulink来仿真,因此下面首先介绍一下实验中要掌握得的一些基本操作(编写试验指导书时所使用的matlab6.1版本)。
若实验过程中使用matlab的版本不同这些基本操作可能会略有不同。
图0-1 matlab启动界面matlab的启动界面如图0-1所示,点击matlab左上方快捷键就可以进入simulink程序界面(在界面右侧的Command Window中输入simulink命令回车或者在Launch Pad窗口中点击simulink子菜单中Library Browser都可以进入simulink程序界面)如图0-2所示。
电力拖动自动控制系统Matlab仿真实验报告
电力拖动自动控制系统---Matlab仿真实验报告实验一二极管单相整流电路一.【实验目的】1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.通过实验进一步加深理解二极管单向导通的特性。
图1-1二极管单相整流电路仿真模型图二.【实验步骤和内容】1.仿真模型的建立1打开模型编辑窗口;2复制相关模块;3修改模块参数;4模块连接;2.仿真模型的运行1仿真过程的启动;2仿真参数的设置;3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2整流电压输出波形图图1-3整流电流输出波形图图1-4整形电压、电流输出波形图实验二三相桥式半控整流电路一.【实验目的】1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.研究三相桥式半控整流电路整流的工作原理和全过程。
二.【实验步骤和内容】1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:(1)交流电压源参数U=100V,f=25Hz,三相电源相位依次延迟120°。
(2)晶闸管参数Rn=0.001Ω,Lon=0.0001H,Vf=0V,Rs=50Ω,Cs=250e-6F。
(3)负载参数R=10Ω,L=0H,C=inf。
(4)脉冲发生器的振幅为5V,周期为0.04s(即频率为25Hz),脉冲宽度为2。
图2-1三相桥式半控整流电路仿真模型图当α=0°时,设为0.0033s,0.0166s,0.0299s。
图2-2α=0°整流输出电压等波形图当α=60°时,触发信号初相位依次设为0.01s,0.0233s,0.0366s。
图2-3α=60°整流输出电压等波形图三.【实验总结】三相可控整流电路中,最基本的是三相半波可控整流电路,应用最为广泛的是三相桥式全控整流电路、双反星形可控整流电路以及十二脉波可控整流电路等,均可在三相半波的基础上进行分析。
电力拖动自动控制系统Matlab仿真实验报告
电力拖动自动控制系统---Matlab仿真实验报告实验一二极管单相整流电路一.【实验目的】1.通过对二极管单相整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.通过实验进一步加深理解二极管单向导通的特性。
图1-1 二极管单相整流电路仿真模型图二.【实验步骤与内容】1.仿真模型的建立①打开模型编辑窗口;②复制相关模块;③修改模块参数;④模块连接;2.仿真模型的运行①仿真过程的启动;②仿真参数的设置;3.观察整流输出电压、电流波形并作比较,如图1-2、1-3、1-4所示。
三.【实验总结】由于负载为纯阻性,故输出电压与电流同相位,即波形相同,但幅值不等,如图1-4所示。
图1-2 整流电压输出波形图图1-3 整流电流输出波形图图1-4 整形电压、电流输出波形图实验二三相桥式半控整流电路一.【实验目的】1.通过对三相桥式半控整流电路的仿真,掌握由电路原理图转换成仿真电路的基本知识;2.研究三相桥式半控整流电路整流的工作原理与全过程。
二.【实验步骤与内容】1.仿真模型的建立:打开模型编辑窗口,复制相关模块,修改模块参数,模块连接。
2.仿真模型的运行;仿真过程的启动,仿真参数的设置。
相应的参数设置:(1)交流电压源参数U=100 V,f=25 Hz,三相电源相位依次延迟120°。
(2)晶闸管参数Rn=0、001 Ω,Lon=0、000 1 H,Vf=0 V,Rs=50 Ω,Cs=250e-6 F。
(3)负载参数R=10 Ω,L=0 H,C=inf。
(4)脉冲发生器的振幅为5 V, 周期为0、04 s ( 即频率为25 Hz), 脉冲宽度为2。
图2-1 三相桥式半控整流电路仿真模型图当α=0°时, 设为0、003 3s,0、016 6s,0、029 9 s。
图2-2 α=0°整流输出电压等波形图当α=60°时,触发信号初相位依次设为0、01s,0、0233s,0、0366s。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一 转速反馈控制(单闭环)直流调速系统仿真一.实验目的1.研究直流电动机调速系统在转速反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR 的工作及其对系统响应特性的影响。
3. 观察转速反馈直流调速系统在给定阶跃输入下的转速响应。
二、实验设备1.计算机;2.模拟实验装置系统;3.A/D & D/A 接口卡、扁平电缆(如下图所示)。
三、实验原理● 直流电动机:额定电压 , 额定电流 ,额定转速 ,电动机电势系数 ● 晶闸管整流装置输出电流可逆,装置的放大系数 K s =44,滞后时间常数 T s =0.00167s 。
● 电枢回路总电阻 R=1.0Ω ,电枢回路电磁时间常数T 1=0.00167s ,电力拖动系统机电时间常数T m =0.075s 。
● 转速反馈系数α=0.01 V ·min/r 。
● 对应额定转速时的给定电压图1 比例积分控制的直流调速系统的仿真框图四、实验内容1. 仿真模型的建立⏹ 进入MATLAB ,单击MATLAB 命令窗口工具栏中的SIMULINK 图标,220N U V =55dN I A =1000min N n r /=0.192min/e C V r =⋅*10n U V =图2 SIMULINK模块浏览器窗口(1)打开模型编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选择File→New→Model菜单项实现。
(2)复制相关模块:双击所需子模块库图标,则可打开它,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
在本例中拖入模型编辑窗口的为:Source组中的Step模块;Math Operations组中的Sum 模块和Gain模块;Continuous组中的Transfer Fcn模块和Integrator模块;Sinks组中的Scope 模块;图3 模型编辑窗口(3)修改模块参数:双击模块图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。
双击sum 模块,Transfer Fen 模块,Step 模块,Gain 模块,Integrator 模块图4加法器sum 模块对话框图5 传递函数Transfer Fen 模块对话框描述加法器三路输入的符号,|表示该路没有信号,用|+-取代原来的符号。
得到减法器。
例如,0.002s+1是用向量[0.002 1]来表示的。
分子多项式系数分母多项式系数图6 阶跃输入step 模块对话框图7 增益模块对话框阶跃时刻,可改到0 。
阶跃值,可改到10 。
填写所需要的放大系数图8Integrator 模块对话框(4)模块连接⏹ 以鼠标左键点击起点模块输出端,拖动鼠标至终点模块输入端处,则在两模块间产生“→”线。
⏹ 单击某模块,选取Format →Rotate Block 菜单项可使模块旋转90°;选取Format →Flip Block 菜单项可使模块翻转。
⏹ 把鼠标移到期望的分支线的起点处,按下鼠标的右键,看到光标变为十字后,拖动鼠标直至分支线的终点处,释放鼠标按钮,就完成了分支线的绘制。
2. 仿真模型的运行 图9 比例积分控制的无静差直流调速系统的仿真模型积分饱和值,可改为10。
积分饱和值,可改为-10。
在控制系统中设置调节器是为了改善系统的静、动态性能。
在采用PI 调节器后,构成的是无静差调速系统,如图9所示的仿真模型。
(1)仿真过程的启动:单击启动仿真工具条的按钮,或选择Simulation →Start 菜单项,则可启动仿真过程,再双击示波器模块就可以显示仿真结果。
(2)仿真参数的设置:为了清晰地观测仿真结果,需要对示波器显示格式作一个修改,对示波器的默认值逐一改动。
改动的方法有多种,其中一种方法是选中SIMULINK 模型窗口的Simulation →Configuration Parameters 菜单项,打开仿真控制参数对话框,对仿真控制参数进行设置。
图10 SIMULINK 仿真控制参数对话框(3)启动Scope 工具条中的“自动刻度”按钮。
把当前窗中信号的最大最小值为纵坐标的上下限,得到清晰的图形。
图11 修改控制参数后的仿真结果仿真的起始时间 结束时间修改为0.6秒 自动刻度3. 调节器参数的调整在图9所示的PI 控制无静差直流调速系统的仿真模型中,改变比例系数和积分系数,可以轻而易举地得到振荡、有静差、无静差、超调大或启动快等不同的转速曲线。
仿真曲线反映了对给定信号的跟随性能。
选择合适的PI 参数: (1) , (2) , (3) , 观察系统转速的响应结果。
五、实验报告1.根据给定系统的各项参数(见“实验原理”部分),每个环节的传递函数。
2.画出仿真系统三组PI 参数下的阶跃响应波形,并给出 t s 和σ % 。
0.25pK =13τ=0.56p K =111.43τ=0.8p K =115τ=实验二 转速、电流反馈控制(双闭环)直流调速系统的仿真一.实验目的1.研究直流电动机调速系统在转速、电流反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR 、电流调节器ACR 的工作及其对系统响应特性的影响。
3. 观察转速、电流反馈直流调速系统在给定阶跃输入下的转速响应和电流响应。
二、实验设备1.计算机;2.模拟实验装置系统;3.A/D & D/A 接口卡、扁平电缆。
三、实验原理晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下:直流电动机:220V ,136A ,1460r/min ,C e =0.132Vmin/r ,允许过载倍数λ=1.5 ; 晶闸管装置放大系数:K s =40 ; 电枢回路总电阻:R =0.5Ω ;时间常数:T i=0.03s , T m =0.18s ;电流反馈系数:β=0.05V/A (≈10V/1.5I N ); 转速反馈系数α = 0.07Vmin/r (≈10V/n N )。
图1 双闭环直流调速系统的仿真框图其中,电流调节器ACR 的传递函数为s s K s W i i i ACR )1()(ττ+=; 转速调节器ASR 的传递函数为(1)()n n ASR n K s W s sττ+=。
四、实验内容1. 电流环的仿真(1) 建立如上图2所示的系统模型。
(2) 在仿真模型中增加了一个饱和非线性模块(Saturation ),它来自于Discontinuities 组,双击该模块,把饱和上界(Upper limit )和下届(Lower limit )参数分别设置为本例题的限幅值+10和-10。
如图3所示。
(3)选中Simulink模型窗口的Simulation →Configuration Parameters菜单项,把Sart time 和Stop time 栏目分别填写为0.0s和0.05s。
(4)启动仿真过程,用自动刻度(Autoscale)调整示波器模块所显示的曲线。
图2 电流环的仿真模型图3 Saturation模块对话框(4)调节器参数的调整:令KT = 0.25,则PI调节器的传递函数为16.890.5067s+, K i = 0.5067,τi =0.03s;令KT = 0.5,则PI调节器的传递函数为33.771.013s+,K i = 1.013,τi =0.03s;令KT = 1.0,则PI 调节器的传递函数为67.5672.027s+, K i = 2.027, τi =0.03s 。
观察各组参数下的电流响应曲线。
2. 转速环的仿真(1)建立如图4所示的系统模型。
图4 转速环的仿真模型(2)为了在示波器模块中反映出转速、电流的关系,仿真模型从Signal Routing 组中选用了Mux 模块来把几个输入聚合成一个向量输出给Scope 。
图5 聚合模块对话框(3)PI 调节器采用传递函数为134.4811.7s+,K n = 11.7, τn =0.087s(4)双击阶跃输入模块把阶跃值设置为10,观察空载起动时的转速和电流的响应曲线。
(5)Step1模块是用来输入负载电流的。
把负载电流设置为136,满载起动,观察其转速与电流响应曲线。
五、实验报告 1.电流环仿真(1)画出三组参数下(KT = 0.25, 0.5, 1.0)电流的阶跃响应曲线,分析并给出 t s 和σ %。
(2)在直流电动机的恒流升速阶段,电流值是否低于(或高于)λI N = 200A ?为什么?2.转速环仿真(1)画出仿真系统空载起动时的转速和电流的阶跃响应曲线,分析指出不饱和、饱和、退饱和三个时间阶段,并给出 t s 和σ % 。
(2)画出仿真系统满载起动时的转速和电流的阶跃响应曲线,并给出 t s 和σ % 。
实验三 异步电动机的仿真一.实验目的1.以αβ坐标系异步电动机仿真模型为核心,研究三相异步电动机的动态仿真模型2.观察三相异步电动机在额定电压和额定频率下,空载起动和加载过程的转速和电流响应。
二、实验设备1.计算机;2.模拟实验装置系统;3.A/D & D/A 接口卡、扁平电缆。
三、实验原理ω —ψr — i s 为状态变量的异步电动机动态模型:2222222()11p m p s r s r L r r m r r s r rr m r r s r rs m m s rr m s r r s s r r s r s r ss m m s r r m r r s s r r s r s r n L n d i i T dt JL Jd L i dt T T d L i dt T T di L L R L R L u i dt L L T L L L L L di L L R L R L i dt L L T L L L L βααβααβαββαβαααβαββαβωψψψψωψψψωψψωψσσσσψωψσσσ=--=--+=-+++=+-++=--+s su L βσ图1 αβ坐标系下的异步电动机动态结构图图2 αβ坐标系异步电动机的仿真模型异步电动机工作在额定电压和额定频率下,仿真电动机参数:R s=1.85Ω, R r =2.658Ω, L s = 0.2941H, L r= 0.2898H, L m=0.2838H, J = 0.1284Nm.s2, n p= 2, U N=380v, f N = 50Hz三、实验内容图3 三相异步电动机仿真模型建立三相异步电动机的仿真模型(如图3所示)。
将图2所示的异步电动机仿真模型进行封装,如图3所示的ACmotor,三相正弦对称电压u A,u B和u C经过3/2变换和2/3变换模块,得到两相电压u sα和u sβ,送入αβ坐标系中的异步电动机仿真模型,输出两相电流i sα和i sβ经2/3变换模块,得到三相电流i A, i B和i C 。