PhysRevD.88.103528
hiredis windows编译

hiredis windows编译Hiredis 是一个用于C 语言的Redis 客户端库,能够帮助开发者在Windows 系统上连接和操作Redis 数据库。
本文将为您提供一步一步的指导,详细介绍如何在Windows 上编译Hiredis。
第一步:安装MSYS2要在Windows 上编译Hiredis,我们需要先安装一个工具,称为MSYS2。
MSYS2 是一个提供运行各种Unix 命令和工具的环境的软件包集合,可以在Windows 上模拟类Unix 的环境。
请按照以下步骤安装MSYS2:# 1. 下载MSYS2可以在MSYS2 官网(MSYS2 的最新版本。
根据您的系统位数(32位或64位)选择相应的版本进行下载。
# 2. 安装MSYS2下载完成后,运行安装程序,并按照提示进行安装。
默认情况下,MSYS2 会安装在C:\msys64(或者C:\msys32)目录下。
安装过程可能需要一些时间,请耐心等待。
第二步:设置MSYS2 环境安装完成后,我们需要进行一些环境设置,以便能够在MSYS2 中正确编译Hiredis。
# 1. 启动MSYS2找到MSYS2 安装目录下的msys2.exe 文件,并双击打开。
# 2. 更新MSYS2在MSYS2 窗口中,输入以下命令并按Enter 执行,以更新MSYS2 本身的软件包。
shellpacman -Syuu# 3. 安装必要的软件包在MSYS2 窗口中,输入以下命令并按Enter 执行,以安装编译Hiredis 所需的软件包。
shellpacman -S git make gcc第三步:克隆Hiredis 代码库成功安装MSYS2 并配置好环境后,我们需要下载Hiredis 代码库并在本地进行编译。
# 1. 克隆Hiredis 代码库在MSYS2 窗口中,使用以下命令克隆Hiredis 代码库。
shellgit clone# 2. 进入Hiredis 目录使用以下命令进入Hiredis 代码库目录。
华硕B85M-G主板说明书C8146

B85M-G
用戶手冊
Motherboard
C8146
第一版(V1) 2013 年 5 月
版權說明 ©ASUSTeK Computer Inc. All rights reserved. 華碩電腦股份有限公司保留所有權利。
本用戶手冊包括但不限於其所包含的所有信息都受到著作權法的保護,未經華碩電腦股份有限公 司(以下簡稱“華碩”)許可,不得有任何仿造、複製、摘抄、轉譯、發行等行為或為其它利用。
(1) for free by downloading it from /download; or (2) for the cost of reproduction and shipment, which is dependent on the preferred carrier and the location where you want to have it shipped to, by sending a request to:
受保修服務。
四、 若經本公司判斷屬下列因素,則不屬於免費保修服務的範圍,本公司將有權利收取維修費用:
physdiskwrite 命令参数

`physdiskwrite` 是一个用于将二进制镜像写入物理磁盘的命令行工具。
它通常用于在Windows系统上将镜像文件写入USB设备或其他存储介质。
以下是一些常见的`physdiskwrite` 命令参数:```Usage: physdiskwrite <imagefile>-u<unit> use unit <unit> (e.g. -u0)-d display unit information and existing partitions-c check for a boot sector on the device-s<sector> start at sector <sector>-e<sector> end at sector <sector>-l list all found physical drives-L list all found physical drives with extended information-h display this help message-q quiet mode (no output)-n no partition table (for devices that don't have one)-m<mbrfile> use the specified file as the MBR-p create a primary partition (default is to write whole disk)-P<pbrfile> use the specified file as the PBR-X force write to a partition (use with caution!)-D override disk geometry with user supplied-w write-protect the image file-W write-protect the physical drive (dangerous!)-f fix the partition table (experimental!)-r retry write on error (useful for some CF cards)-k<sectors> keep <sectors> free (unwritten) at the end of the disk-b ignore partition table on disk-C<codetype> specify partition coding type (default 1)-U<unitoffset> specify unit offset (hexadecimal)-R recovery of (corrupted) partitions```请注意,实际使用时,`<imagefile>` 应该替换为你要写入的二进制镜像文件的路径。
NVIDIA Data Center GPU Driver version 450.80.02 (L
NVIDIA Data Center GPU Driver version 450.80.02 (Linux) / 452.39 (Windows)Release NotesTable of Contents Chapter 1. Version Highlights (1)1.1. Software Versions (1)1.2. Fixed Issues (1)1.3. Known Issues (2)Chapter 2. Virtualization (5)Chapter 3. Hardware and Software Support (7)Chapter 1.Version HighlightsThis section provides highlights of the NVIDIA Data Center GPU R450 Driver (version 450.80.02 Linux and 452.39 Windows).For changes related to the 450 release of the NVIDIA display driver, review the file "NVIDIA_Changelog" available in the .run installer packages.Driver release date: 09/30/20201.1. Software Versions07/28/2020: For this release, the software versions are listed below.‣CUDA Toolkit 11: 11.03Note that starting with CUDA 11, individual components of the toolkit are versionedindependently. For a full list of the individual versioned components (e.g. nvcc, CUDA libraries etc.), see the CUDA Toolkit Release Notes‣NVIDIA Data Center GPU Driver: 450.80.02 (Linux) / 452.39 (Windows)‣Fabric Manager: 450.80.02 (Use nv-fabricmanager -v)‣GPU VBIOS:‣92.00.19.00.01 (NVIDIA A100 SKU200 with heatsink for HGX A100 8-way and 4-way)‣92.00.19.00.02 (NVIDIA A100 SKU202 w/o heatsink for HGX A100 4-way)‣NVSwitch VBIOS: 92.10.14.00.01‣NVFlash: 5.641Due to a revision lock between the VBIOS and driver, VBIOS versions >= 92.00.18.00.00 must use corresponding drivers >= 450.36.01. Older VBIOS versions will work with newer drivers. For more information on getting started with the NVIDIA Fabric Manager on NVSwitch-based systems (for example, HGX A100), refer to the Fabric Manager User Guide.1.2. Fixed Issues‣Various security issues were addressed. For additional details on the med-high severity issues, review the NVIDIA Security Bulletin 5075 .‣Fixed an issue where using CUDA_VISIBLE_DEVICES environment variable to restrict devices seen by CUDA on a multi-GPU A100 system (such as DGX A100 or HGX A100) may cause an out-of-memory error for some workloads, for example when running with CUDA IPC.‣Fixed an issue with ECC DBE handling on A100 resulting in an incorrect part of GPU memory being retired. The faulty memory would continue to be available even afterresetting the GPU/rebooting the system and hitting the same DBE every time could make the GPU unusable.‣Fixed an issue with ECC DBE handling on A100 resulting in an incorrect part of GPU memory being retired. The faulty memory would continue to be available even afterresetting the GPU/rebooting the system and hitting the same DBE every time could make the GPU unusable.1.3. Known IssuesGeneral‣By default, Fabric Manager runs as a systemd service. If using DAEMONIZE=0 in the Fabric Manager configuration file, then the following steps may be required.1.Disable FM service from auto starting. (systemctl disable nvidia-fabricmanager)2.Once the system is booted, manually start FM process. (/usr/bin/nv-fabricmanager-c /usr/share/nvidia/nvswitch/fabricmanager.cfg). Note, since the processis not a daemon, the SSH/Shell prompt will not be returned (use another SSH shell for other activities or run FM as a background task).‣There is a known issue with cross-socket GPU to GPU memory consistency that is currently under investigation‣When starting the Fabric Manager service, the following error may be reported: detected NVSwitch non-fatal error 10003 on NVSwitch pci. This error is not fatal and no functionality is affected. This issue will be resolved in a future driver release.‣On NVSwitch systems with Windows Server 2019 in shared NVSwitch virtualization mode, the host may hang or crash when a GPU is disabled in the guest VM. This issue is under investigation.‣In some cases, after a system reboot, the first run of nvidia-smi shows an ERR! for the power status of a GPU in a multi-GPU A100 system. This issue is not observed when running with peristence mode enabled.GPU Performance CountersThe use of developer tools from NVIDIA that access various performance countersrequires administrator privileges. See this note for more details. For example, readingNVLink utilization metrics from nvidia-smi (nvidia-smi nvlink -g 0) would require administrator privileges.NoScanout ModeNoScanout mode is no longer supported on NVIDIA Data Center GPU products. If NoScanout mode was previously used, then the following line in the “screen” section of /etc/X11/xorg.conf should be removed to ensure that X server starts on data center products:Option "UseDisplayDevice" "None"NVIDIA Data Center GPU products now support one display of up to 4K resolution.Unified Memory SupportSome Unified Memory APIs (for example, CPU page faults) are not supported on Windows in this version of the driver. Review the CUDA Programming Guide on the system requirements for Unified MemoryCUDA and unified memory is not supported when used with Linux power management states S3/S4.IMPU FRU for Volta GPUsThe driver does not support the IPMI FRU multi-record information structure for NVLink. See the Design Guide for Tesla P100 and Tesla V100-SXM2 for more information.Video Memory SupportFor Windows 7 64-bit, this driver recognizes up to the total available video memory on data center cards for Direct3D and OpenGL applications.For Windows 7 32-bit, this driver recognizes only up to 4 GB of video memory on data center cards for DirectX, OpenGL, and CUDA applications.Experimental OpenCL FeaturesSelect features in OpenCL 2.0 are available in the driver for evaluation purposes only.The following are the features as well as a description of known issues with these features in the driver:Device side enqueue‣The current implementation is limited to 64-bit platforms only.‣OpenCL 2.0 allows kernels to be enqueued with global_work_size larger than the compute capability of the NVIDIA GPU. The current implementation supports only combinations of global_work_size and local_work_size that are within the compute capability of the NVIDIA GPU. The maximum supported CUDA grid and block size of NVIDIA GPUs is available at /cuda/cuda-c-programming-guide/index.html#computecapabilities.For a given grid dimension, the global_work_size can be determined by CUDA grid size x CUDA block size.‣For executing kernels (whether from the host or the device), OpenCL 2.0 supports non-uniform ND-ranges where global_work_size does not need to be divisible by thelocal_work_size. This capability is not yet supported in the NVIDIA driver, and therefore not supported for device side kernel enqueues.Shared virtual memory‣The current implementation of shared virtual memory is limited to 64-bit platforms only.Chapter 2.VirtualizationTo make use of GPU passthrough with virtual machines running Windows and Linux, the hardware platform must support the following features:‣ A CPU with hardware-assisted instruction set virtualization: Intel VT-x or AMD-V.‣Platform support for I/O DMA remapping.‣On Intel platforms the DMA remapper technology is called Intel VT-d.‣On AMD platforms it is called AMD IOMMU.Support for these features varies by processor family, product, and system, and should be verified at the manufacturer's website.Supported HypervisorsThe following hypervisors are supported:Tesla products now support one display of up to 4K resolution.Supported Graphics CardsThe following GPUs are supported for device passthrough:VirtualizationChapter 3.Hardware and SoftwareSupportSupport for these feature varies by processor family, product, and system, and should be verified at the manufacturer's website.Supported Operating Systems for NVIDIA Data Center GPUsThe Release 450 driver is supported on the following operating systems:‣Windows x86_64 operating systems:‣Microsoft Windows® Server 2019‣Microsoft Windows® Server 2016‣Microsoft Windows® 10‣The table below summarizes the supported Linux 64-bit distributions. For a complete list of distributions, kernel versions supported, see the CUDA Linux System Requirements documentation.Hardware and Software Support Note that SUSE Linux Enterprise Server (SLES) 15.1 is provided as a preview for Arm64 server since there are known issues when running some CUDA applications related to dependencies on glibc 2.27.Supported Operating Systems and CPU Configurations for HGX A100The Release 450 driver is validated with HGX A100 on the following operating systems and CPU configurations:‣Linux 64-bit distributions:‣Red Hat Enterprise Linux 8.1 (in 4/8/16-GPU configurations)‣CentOS Linux 7.7 (in 4/8/16-GPU configurations)‣Ubuntu 18.04.4 LTS (in 4/8/16-GPU configurations)‣SUSE SLES 15.1 (in 4/8/16-GPU configurations)‣Windows 64-bit distributions:‣Windows Server 2019 (in 4/8/16-GPU configurations)‣CPU Configurations:‣AMD Rome in PCIe Gen4 mode‣Intel Skylake/Cascade Lake (4-socket) in PCIe Gen3 modeSupported Virtualization ConfigurationsThe Release 450 driver is validated with HGX A100 on the following configurations:‣Passthrough (full visibility of GPUs and NVSwitches to guest VMs):‣8-GPU configurations with Ubuntu 18.04.4 LTS‣Shared NVSwitch (guest VMs only have visibility of GPUs and full NVLink bandwidth between GPUs in the same guest VM):‣16-GPU configurations with Ubuntu 18.04.4 LTSAPI SupportThis release supports the following APIs:‣NVIDIA® CUDA® 11.0 for NVIDIA® Kepler TM, Maxwell TM, Pascal TM, Volta TM, Turing TM and NVIDIA Ampere architecture GPUs‣OpenGL® 4.5‣Vulkan® 1.1‣DirectX 11‣DirectX 12 (Windows 10)‣Open Computing Language (OpenCL TM software) 1.2Note that for using graphics APIs on Windows (i.e. OpenGL, Vulkan, DirectX 11 and DirectX 12) or any WDDM 2.0+ based functionality on Tesla GPUs, vGPU is required. See the vGPU documentation for more information.Supported NVIDIA Data Center GPUsThe NVIDIA Data Center GPU driver package is designed for systems that have one or more Tesla products installed. This release of the driver supports CUDA C/C++ applications and libraries that rely on the CUDA C Runtime and/or CUDA Driver API.NoticeTHE INFORMATION IN THIS GUIDE AND ALL OTHER INFORMATION CONTAINED IN NVIDIA DOCUMENTATION REFERENCED IN THIS GUIDE IS PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE INFORMATION FOR THE PRODUCT, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the product described in this guide shall be limited in accordance with the NVIDIA terms and conditions of sale for the product.THE NVIDIA PRODUCT DESCRIBED IN THIS GUIDE IS NOT FAULT TOLERANT AND IS NOT DESIGNED, MANUFACTURED OR INTENDED FOR USE IN CONNECTION WITH THE DESIGN, CONSTRUCTION, MAINTENANCE, AND/OR OPERATION OF ANY SYSTEM WHERE THE USE OR A FAILURE OF SUCH SYSTEM COULD RESULT IN A SITUATION THAT THREATENS THE SAFETY OF HUMAN LIFE OR SEVERE PHYSICAL HARM OR PROPERTY DAMAGE (INCLUDING, FOR EXAMPLE, USE IN CONNECTION WITH ANY NUCLEAR, AVIONICS, LIFE SUPPORT OR OTHER LIFE CRITICAL APPLICATION). NVIDIA EXPRESSLY DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY OF FITNESS FOR SUCH HIGH RISK USES. NVIDIA SHALL NOT BE LIABLE TO CUSTOMER OR ANY THIRD PARTY, IN WHOLE OR IN PART, FOR ANY CLAIMS OR DAMAGES ARISING FROM SUCH HIGH RISK USES.NVIDIA makes no representation or warranty that the product described in this guide will be suitable for any specified use without further testing or modification. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to ensure the product is suitable and fit for the application planned by customer and to do the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this guide. NVIDIA does not accept any liability related to any default, damage, costs or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this guide, or (ii) customer product designs.Other than the right for customer to use the information in this guide with the product, no other license, either expressed or implied, is hereby granted by NVIDIA under this guide. Reproduction of information in this guide is permissible only if reproduction is approved by NVIDIA in writing, is reproduced without alteration, and is accompanied by all associated conditions, limitations, and notices.TrademarksNVIDIA and the NVIDIA logo are trademarks and/or registered trademarks of NVIDIA Corporation in the Unites States and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.Copyright© 2020 NVIDIA Corporation. All rights reserved.。
Windows98下虚拟设备驱动程序VxD的开发

下面就如何利用 VtoolsD 设计生成硬件驱动程序 ,响应中断 、转换物理地址为线性地址 , 结合实例作一简介 。
在脉冲多普勒气象雷达产品中 ,要从回波信号里提取有用的气象信息 ,必须由信号处理卡 对信息进行适当的处理 。信号处理卡处理完一批数据后 ,向计算机发出中断 ,计算机收到中断 后 ,进入中断服务子程序 ,将信号处理卡产生的数据读出 ,经过修正 、打包后 ,向网络进行广播 。
(1) 用 QuickVxD 生成框架程序 包括三个文件 : 3 . cpp 源文件 , 3 . h 头文件 , 3 . mak 工程文件 。在 VC + + 中打开工作 区 ,选择工程文件 3 . mak ,在 Project 菜单下选择 Add to Project ,加入 3 . cpp , 3 . h ,将 Project 菜单下 Setting 的 Output File Name 中文件后缀改成 vxd ,在此框架的源文件和头文件中 ,添加 相应的程序代码 ,编译通过即可生成 VxD 文件 。 (2) Windows 98 下硬件中断的处理 应用程序使用 CreateFile () 函数动态加载硬件设备驱动程序 Phys. vxd ,中断产生后 ,硬件 驱动程序在 OnHardware Int () 函数中调用 SHELL PostMessage ( ) 向应用程序窗口发送消息 。 应用程序使用 Pre TranslateMessage () 函数获取消息 ,通过调用 Device IoControl () 函数与 VxD 的函数 OnW32Device IoControl ( ) 互传缓冲区数据 。程序结束 ,调用 CloseHandle ( ) 动态卸载 Phys. vxd。 / / 生成硬件驱动程序 Phys. vxd 的源程序清单 : BOOL PhysDevice : :OnSysDynamicDevice Init () / / 动态加载时初始化
NVIDIA DOCA虚拟功能用户指南.pdf_1701755954.798375说明书

User GuideTable of ContentsChapter 1. Introduction (1)Chapter 2. Prerequisites (2)Chapter 3. VF Creation (3)Chapter 4. Running DOCA Application on Host (4)Chapter 5. Topology Example (5)Chapter 6. VF Creation on Adapter Card (7)Chapter 1.IntroductionSingle root IO virtualization (SR-IOV) is a technology that allows a physical PCIe deviceto present itself multiple times through the PCIe bus. This technology enables multiple virtual instances of the device with separate resources. NVIDIA adapters are able to expose virtual instances or functions (VFs) for each port individually. These virtual functions can then be provisioned separately.Each VF can be seen as an additional device connected to the physical interface or function (PF). It shares the same resources with the PF, and its number of ports equals those of the PF.SR-IOV is commonly used in conjunction with an SR-IOV-enabled hypervisor to provide virtual machines direct hardware access to network resources, thereby increasing its performance.There are several benefits to running applications on the host. For example, one may want to utilize a strong and high-resource host machine, or to start DOCA integration on the host before offloading it to the BlueField DPU.The configuration in this document allows the entire application to run on the host's memory, while utilizing the HW accelerators on BlueField (e.g., using RegEx the accelerator on BlueField via a daemon running on it).When VFs are enabled on the host, VF representors are visible on the Arm side which can be bridged to corresponding PF representors (e.g., the uplink representor and the host representor). This allows the application to only scan traffic forwarded to theVFs as configured by the user and to behave as a simple "bump-on-the-wire". DOCA installed on the host allows access to the hardware capabilities of the BlueField DPU without comprising features such as the stateful table (SFT) which uses HW offload and additional HW steering elements embedded inside the eSwitch.Chapter 2.PrerequisitesRunning applications on the host and using the RegEx accelerator on the BlueField requires enabling the RegEx engine.To run all the reference applications over the host, you must install the host DOCA package. Refer to NVIDIA DOCA Installation Guide for Linux for more information on host installation.VFs must be configured as trusted for the hardware jump action to work as intended. The following steps configure "trusted" mode for VFs:1.Delete all existing VFs/SFs.a).To delete all VFs on a PF run the following on the host:$ echo 0 > /sys/class/net/<physical_function>/device/sriov_numvfsFor example:$ echo 0 > /sys/class/net/ens1f0/device/sriov_numvfsb).Refer to Scalable Function Setup Guide for instructions on deleting SFs.2.Stop the main driver on the host:/etc/init.d/openibd stop3.Before creating the VFs, set them to "trusted" mode on the device by running thefollowing commands on the Arm side.a).Setting VFs on port 0:$ mlxreg -d /dev/mst/mt41686_pciconf0 --reg_id 0xc007 --reg_len 0x40 --indexes "0x0.0:32=0x80000000" --yes --set "0x4.0:32=0x1"b).Setting VFs on port 1:$ mlxreg -d /dev/mst/mt41686_pciconf0.1 --reg_id 0xc007 --reg_len 0x40 --indexes "0x0.0:32=0x80000000" --yes --set "0x4.0:32=0x1"Note: These commands set trusted mode for all created VFs/SFs after their executionon Arm.Note: Setting trusted mode should be performed once per reboot.4.Restart the main driver on the host by running the following command:/etc/init.d/openibd restartChapter 3.VF Creation1.Enable SR-IOV. Run:host$ mlxconfig -y -d /dev/mst/mt41686_pciconf0 s SRIOV_EN=12.Set number of VFs. Run:host$ mlxconfig -y -d /dev/mst/mt41686_pciconf0 s NUM_OF_VFS=XNote: Requires power cycle.host$ echo X > /sys/class/net/<physical_function>/device/sriov_numvfsFor example:host $ mlxconfig -y -d /dev/mst/mt41686_pciconf0 s NUM_OF_VFS=2host $ reboothost $ echo 2 > /sys/class/net/ens1f0/device/sriov_numvfsAfter enabling VF, the representor appears on the DPU. The function itself is seen at the host.3.To verify that the VFs have been created. Run:$ lspci | grep Mellanox05:00.0 Ethernet controller: Mellanox Technologies Device a2d605:00.1 Ethernet controller: Mellanox Technologies Device a2d605:00.2 DMA controller: Mellanox Technologies Device c2d305:00.3 Ethernet controller: Mellanox Technologies MT2885005:00.4 Ethernet controller: Mellanox Technologies MT28850Note: 2 new virtual Ethernet devices are created in this example.Chapter 4.Running DOCA Applicationon HostThe following steps are required only if the application utilizes the RegEx engine:1.Stop the driver on the host. Run:host$ sudo /etc/init.d/openibd stop2.On the Arm, start the driver. Run:dpu$ sudo /etc/init.d/openibd start3.On the Arm, enable RegEx (only if the application requires it). Run:dpu$ echo 1 > /sys/class/net/p0/smart_nic/pf/regex_en4.On the Arm, add 200 huge pages. Run:dpu$ current_huge=$(cat /sys/kernel/mm/hugepages/hugepages-2048kB/nr_hugepages) dpu$ sudo echo $((200 + current_huge)) > /sys/kernel/mm/hugepages/hugepages-2048kB/nr_hugepages5.On the Arm, start mlx RegEx. Run:dpu$ systemctl start mlx-regexNote: If it has not been set before, the previous value of huge pages should be 2048 orhigher (depending on the number of cores).6.Verify that the service is running. Run:dpu$ systemctl status mlx-regex7.The host can now run RegEx. Run:host$ sudo /etc/init.d/openibd startNote: Running DPDK over the host requires configuring huge pages.Note: By default, a DPDK application initializes all the cores of the device. This is usuallyunnecessary and may even cause unforeseeable issues. It is recommended to limit thenumber of cores, especially when using an AMD-based system, to 16 cores using the -cflag when running DPDK.The following is a CLI example for running a reference application over the host using VF: ./opt/mellanox/doca/applications/**/bin/*executable* -a "pci address VF0" -a "pciaddress VF1" -c 0xff -- "application flags"Chapter 5.Topology ExampleThe following is a topology example for running the application over the host.Configure the OVS on BlueField as follows:Bridge ovsbr1Port ovsbr1Interface ovsbr1type: internalTopology ExamplePort pf0hpfInterface pf0hpfPort pf0vf1Interface pf0vf1Bridge vf_brPort p0Interface p0Port vf_brInterface vf_brtype: internalPort pf0vf0Interface pf0vf0When enabling a new VF over the host, VF representors are created on the Arm side. The first OVS bridge connects the uplink connection (p0) to the new VF representor(pf0vf0), and the second bridge connects the second VF representor (pf0vf1) to the host representors (pf0phf). On the host, the 2 PCIe addresses of the newly created function must be initialized when running the applications.When traffic is received (e.g., from the uplink), the following occurs:1.Traffic is received over p0.2.Traffic is forwarded to pf0vf0.3.Application "listens" to pf0vf0 and pf0vf1 and can, therefore, acquire the traffic from pf0vf0, inspect it, and forward to pf0vf1.4.Traffic is forwarded from pf0vf1 to pf0hpf.Chapter 6.VF Creation on AdapterCardNote: Supported only for NVIDIA® ConnectX®-6 Dx based adapter cards and higher.The following steps are required only when running DOCA applications, such as Simple Fwd VNF, on an adapter card.1.Set trust level for all VFs. Run:host# mlxreg -d /dev/mst/mt4125_pciconf0 --reg_name VHCA_TRUST_LEVEL --yes --set "all_vhca=0x1,trust_level=0x1" --indexes "vhca_id=0x0,all_vhca=0x0"2.Create X VFs (X being the required number of VFs) and run the following to turn ontrusted mode for the created VFs:echo ON | tee /sys/class/net/enp1s0f0np0/device/sriov/X/trustFor example, if you are creating 2 VFs, the following commands should be used:echo ON | tee /sys/class/net/enp1s0f0np0/device/sriov/0/trustecho ON | tee /sys/class/net/enp1s0f0np0/device/sriov/1/trust3.Create a VF representor using the following command, replace the PCIe address withthe PCIe address of the created VF:echo 0000:17:00.2 > /sys/bus/pci/drivers/mlx5_core/unbindecho 0000:17:00.2 > /sys/bus/pci/drivers/mlx5_core/bindNoticeThis document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation nor any of its direct or indirect subsidiaries and affiliates (collectively: “NVIDIA”) make no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assume no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.TrademarksNVIDIA, the NVIDIA logo, and Mellanox are trademarks and/or registered trademarks of Mellanox Technologies Ltd. and/or NVIDIA Corporation in the U.S. and in other countries. The registered trademark Linux® is used pursuant to a sublicense from the Linux Foundation, the exclusive licensee of Linus Torvalds, owner of the mark on a world¬wide basis. Other company and product names may be trademarks of the respective companies with which they are associated.Copyright© 2023 NVIDIA Corporation & affiliates. All rights reserved.NVIDIA Corporation | 2788 San Tomas Expressway, Santa Clara, CA 95051。
NVIDIA RTX A5000 专业级图形卡说明书
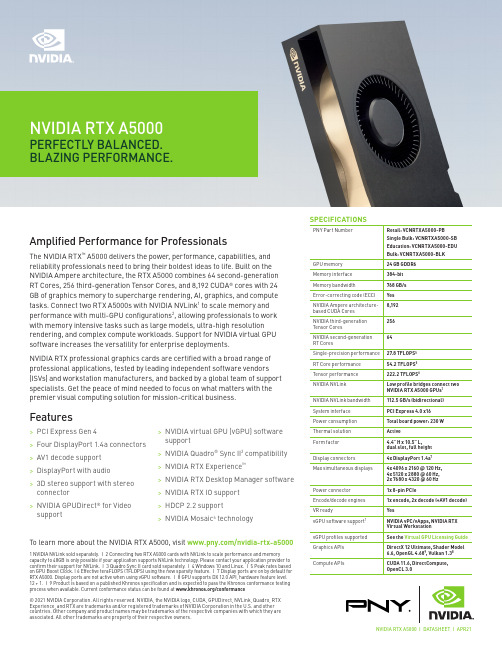
NVIDIA RTX A5000 PERFECTLY BALANCED. BLAZING PERFORMANCE.Amplified Performance for ProfessionalsThe NVIDIA RTX™ A5000 delivers the power, performance, capabilities, and reliability professionals need to bring their boldest ideas to life. Built on the NVIDIA Ampere architecture, the RTX A5000 combines 64 second-generation RT Cores, 256 third-generation Tensor Cores, and 8,192 CUDA® cores with 24 GB of graphics memory to supercharge rendering, AI, graphics, and compute tasks. Connect two RTX A5000s with NVIDIA NVLink1 to scale memory and performance with multi-GPU configurations2, allowing professionals to work with memory intensive tasks such as large models, ultra-high resolution rendering, and complex compute workloads. Support for NVIDIA virtual GPU software increases the versatility for enterprise deployments.NVIDIA RTX professional graphics cards are certified with a broad range of professional applications, tested by leading independent software vendors (ISVs) and workstation manufacturers, and backed by a global team of support specialists. Get the peace of mind needed to focus on what matters with the premier visual computing solution for mission-critical business.SPECIFICATIONSPNY Part Number Retail: VCNRTXA5000-PBSingle Bulk: VCNRTXA5000-SBEducation: VCNRTXA5000-EDUBulk: VCNRTXA5000-BLKGPU memory24 GB GDDR6Memory interface384-bitMemory bandwidth768 GB/sError-correcting code (ECC)YesNVIDIA Ampere architecture-based CUDA Cores8,192NVIDIA third-generationTensor Cores256NVIDIA second-generationRT Cores64Single-precision performance27.8 TFLOPS5RT Core performance54.2 TFLOPS5Tensor performance222.2 TFLOPS6NVIDIA NVLink Low profile bridges connect twoNVIDIA RTX A5000 GPUs1NVIDIA NVLink bandwidth112.5 GB/s (bidirectional)System interface PCI Express 4.0 x16Power consumption Total board power: 230 W Thermal solution ActiveForm factor 4.4” H x 10.5” L,dual slot, full heightDisplay connectors4x DisplayPort 1.4a7Max simultaneous displays4x 4096 x 2160 @ 120 Hz,4x 5120 x 2880 @ 60 Hz,2x 7680 x 4320 @ 60 HzPower connector1x 8-pin PCIeEncode/decode engines1x encode, 2x decode (+AV1 decode) VR ready YesvGPU software support7NVIDIA vPC/vApps, NVIDIA RTXVirtual WorkstationvGPU profiles supported See the Virtual GPU Licensing Guide Graphics APIs DirectX 12 Ultimate, Shader Model6.6, OpenGL 4.689, Vulkan 1.38 Compute APIs CUDA 11.6, DirectCompute,OpenCL 3.0Features>PCI Express Gen 4>Four DisplayPort 1.4a connectors >AV1 decode support>DisplayPort with audio>3D stereo support with stereo connector>NVIDIA GPUDirect® for Video support >NVIDIA virtual GPU (vGPU) softwaresupport>NVIDIA Quadro® Sync II3 compatibility>NVIDIA RTX Experience™>NVIDIA RTX Desktop Manager software>NVIDIA RTX IO support>HDCP 2.2 support>NVIDIA Mosaic4 technologyNVIDIA RTX A5000 | DATASHEET | APR21To learn more about the NVIDIA RTX A5000, visit /nvidia-rtx-a50001 NVIDIA NVLink sold separately. |2 Connecting two RTX A5000 cards with NVLink to scale performance and memory capacity to 48GB is only possible if your application supports NVLink technology. Please contact your application provider to confirm their support for NVLink. |3 Quadro Sync II card sold separately. |4 Windows 10 and Linux. |5 Peak rates based on GPU Boost Clock. |6 Effective teraFLOPS (TFLOPS) using the new sparsity feature. |7 Display ports are on by default for RTX A5000. Display ports are not active when using vGPU software. |8 GPU supports DX 12.0 API, hardware feature level 12 + 1. |9 Product is based on a published Khronos specification and is expected to pass the Khronos conformance testing process when available. Current conformance status can be found at /conformance© 2021 NVIDIA Corporation. All rights reserved. NVIDIA, the NVIDIA logo, CUDA, GPUDirect, NVLink, Quadro, RTX Experience, and RTX are trademarks and/or registered trademarks of NVIDIA Corporation in the U.S. and other countries. Other company and product names may be trademarks of the respective companies with which they are associated. All other trademarks are property of their respective owners.。
sun ultra 24 工作站操作系统安装指南说明书

Sun Ultra™ 24 工作站操作系统安装指南Sun Microsystems, Inc.文件号码 820-3656-102007 年 11 月,修订版 A请到以下网址提交您对本文档的意见和建议:/hwdocs/feedback请回收版权所有 © 2007 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, U.S.A.保留所有权利。
本发行版本可能包含由第三方开发的材料。
Sun 、Sun Microsystems 、Sun 徽标、Java 、Netra 、Solaris 、Sun Ray 、Sun Ultra 、Java Coffee Cup 徽标、Solaris 徽标、Sun Ultra 24、Ultra 24、Sun 和 Sun Microsystems Inc. 是 Sun Microsystems, Inc. 在美国和其他国家/地区的商标和注册商标。
Intel ® Intel 是 Intel Corporation 或其子公司在美国和其他国家/地区的商标或注册商标。
Intel Inside® Intel Inside 是 Intel Corporation 或其子公司在美国和其他国家/地区的商标或注册商标。
本产品受美国出口控制法律的保护和约束,也可能受其他国家/地区的进出口法律的约束。
严禁(直接或间接)用于核、导弹、生化武器或核海事最终用途或最终用户。
严禁出口或转口到美国对其实行禁运的国家/地区,或在美国出口排除列表中标明的机构,包括但不限于,被拒绝的人士和特别指定的国家/地区列表。
对于根据美国出口法规出口的产品,CPU 备件或更换件只能用于修理 CPU 或以“一对一更换”方式更换 CPU 。
除非经过美国政府授权,否则严禁将 CPU 用于产品升级。
Copyright © 2007 Sun Microsystems, Inc., 4150 Network Circle, Santa Clara, California 95054, Etats-Unis. Tous droits réservés. Cette distribution peut inclure des éléments développés par des tierces parties.Sun, Sun Microsystems, le logo Sun, Java, Netra, Solaris, Sun Ray, Sun Ultra , le logo Java Coffee Cup, le logo Solaris, Sun Ultra 24, Ultra 24, Sun et Sun Microsystems Inc. sont des marques de fabrique ou des marques déposées de Sun Microsystems, Inc. aux Etats-Unis et dans d'autres pays.Intel est une marque de fabrique ou une marque déposée de Intel Corporation ou de sa filiale aux Etats-Unis et dans d'autres pays.. Intel Inside est une marque de fabrique ou une marque déposée de Intel Corporation ou de sa filiale aux Etats-Unis et dans d'autres pays.Ce produit est soumis à la législation américaine sur le contrôle des exportations et peut être soumis à la règlementation en vigueur dansd'autres pays dans le domaine des exportations et importations. Les utilisations finales, ou utilisateurs finaux, pour des armes nucléaires, des missiles, des armes biologiques et chimiques ou du nucléaire maritime, directement ou indirectement, sont strictement interdites. Les exportations ou reexportations vers les pays sous embargo américain, ou vers des entités figurant sur les listes d'exclusion d'exportationaméricaines, y compris, mais de maniere non exhaustive, la liste de personnes qui font objet d'un ordre de ne pas participer, d'une façon directe ou indirecte, aux exportations des produits ou des services qui sont régis par la législation américaine sur le contrôle des exportations et la liste de ressortissants spécifiquement désignés, sont rigoureusement interdites. L'utilisation de pièces détachées ou d'unités centrales deremplacement est limitée aux réparations ou à l'échange standard d'unités centrales pour les produits exportés, conformément à la législation américaine en matière d'exportation. Sauf autorisation par les autorités des Etats-Unis, l'utilisation d'unités centrales pour procéder à des mises à jour de produits est rigoureusement interdite.目录前言v1.安装概述1–12.安装 Solaris2–12.1选择和更新操作系统2–12.2为 Solaris 设置 BIOS2–22.3设置 LSI RAID 配置2–22.4擦除当前安装的操作系统2–32.4.1关于诊断分区2–32.4.2当前安装的操作系统的擦除步骤2–32.5安装 Solaris 操作系统2–42.6安装驱动程序2–43.安装 Linux3–13.1选择和更新操作系统3–13.2为 Linux 设置 BIOS3–23.3设置 LSI RAID 配置3–23.4擦除当前安装的操作系统3–33.4.1关于诊断分区3–33.4.2当前安装的操作系统的擦除步骤3–3iii3.5安装 Linux 操作系统3–43.6安装驱动程序3–43.6.1安装 Linux 驱动程序3–44.安装 Windows 操作系统和驱动程序4–14.1为 Windows 操作系统设置 BIOS4–24.1.1为 Windows 操作系统及 Intel SATA 和 RAID 设置系统 BIOS4–24.1.2设置 Intel 矩阵存储管理器选项 ROM4–34.1.3设置 LSI RAID 配置4–34.2了解诊断分区4–44.3擦除启动硬盘驱动器上的分区4–44.4手动安装 Windows4–54.4.1创建 Intel SATA 和 RAID 驱动程序软盘4–54.4.2使用软盘安装 Windows4–64.4.3使用软盘安装 Windows Vista4–74.4.4安装 NVIDIA 显卡和 RealTek 音频驱动程序4–74.5使用 XpReburn 脚本创建包含驱动程序的 Windows 光盘4–84.5.1要求4–84.5.2使用 2003Reburn 或 XpReburn4–8A.安装 Linux 和 Solaris 操作系统远程映像A–1A.1从 PXE 服务器中安装 LINUX A–1A.2从 JumpStart™ 服务器中安装 Solaris A–2iv Sun Ultra 24 工作站操作系统安装指南•2007 年 11 月前言《Sun Ultra 24 工作站操作系统安装指南》包含配置 Solaris™、Linux 和 Windows 操作系统所需的信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Nonparametric reconstruction of dynamical dark energyvia observational Hubble parameter dataHao-Ran Yu,Shuo Yuan,and Tong-Jie Zhang*Department of Astronomy,Beijing Normal University,Beijing100875,China(Received10August2013;published26November2013)We study the power of current and future observational Hubble parameter data(OHD)on non-parametric estimations of the dark energy equation of state(EoS),wðzÞ.We propose a new method by conjunction of principal component analysis and the goodness offit criterion to reconstruct wðzÞ,ensuring the sensitivity and reliability of the extraction of features in the EoS.We also give a new error model to simulate future OHD data,to forecast the power of future OHD on the EoS reconstruction.The result shows that current OHD,despite their lesser quantity,give not only a similar power of reconstruction of dark energy compared to the result given by type Ia supernovae,but also extend the constraint on wðzÞup to redshift z’2.Additionally,a reasonable forecast of future data in greater quantity and better quality greatly enhances the reconstruction of dark energy.DOI:10.1103/PhysRevD.88.103528PACS numbers:98.80.Es,95.36.+xI.INTRODUCTIONThe accelerating expanding Universe is explained bydark energy[1,2]and one of the main challenges of themodern physical cosmology is to study the nature of darkenergy[3].Its evolution and dynamical properties are char-acterized by its equation of state(EoS)w p= ,the ratioof its pressure and energy density.A cosmological constantis usually the simplest model to explain dark energy.Its EoSdoes not depend on redshift z and remains constant:wðzÞ¼À1.Variations of dark energy models,such as quintessence, phantom,quintoms,etc.,are also used to explain darkenergy.Studying dark energy in a parametrized way,suchas Chevallier-Polarski-Linder parametrization[4,5],mayinduce misleading results due to prior assumptions of func-tion forms of the EoS;then we may do null-test diagnosticson dark energy[6]or use model-independent analyses toreconstruct the EoS nonparametrically[7–9].This has been achieved by astronomical data,such as luminosity distances d L of type Ia supernovae(Ia SN)[10,11].Although we have plenty of Ia SN data,they require the second derivative of d L with respect to redshift z and a complicated form of reconstruction equation.Meanwhile,observational Hubble parameter data(OHD)HðzÞreconstruct wðzÞvia a simpler way[Eq.(2)]and require only thefirst derivative of HðzÞ,so this method is more stable and less sensitive to the error of the data.During the last decade,OHD have proved to be very powerful in the constraint of cosmological parameters [12];they correspond to the cosmic expansion history directly and can be measured by various methods,e.g., cosmic chronometers[13],baryonic acoustic oscillation (BAO)peaks[14],and even other proposed Sandage-Loeb (SL)probes[15,16]and the standard siren by gravitational waves.On the way toward obtaining more data from observations,to simulate sets of future OHD appropriately is also instructive at the current stage in exploring the quality of EoS reconstruction in the near future.To do this,we need an error model giving the redshift distribution,the offsets from the theoretical value,and the sizes of their error bars, such as in[17].Here we construct a new and more accurate error model for next generation surveys,carefully estimat-ing the potential power of observation in different methods. For either observational or our simulated data,nonpara-metrically reconstructing HðzÞand wðzÞfrom data confronts the tradeoffs between extracting more features and avoiding the overfitting of errors—if we use fewer parameters,we are losing details of the underlying model,while using more parameters increases the detectability of such details,but it brings the risk of being polluted by the errors.Principle component analysis(PCA)is usually used to exclude error-induced oscillations in the reconstructing processes[10], and information criteria[18]are often used for choosing models[11].We alsofind that the goodness offit(GoF)is an effective probe of overfitting.The conjunction of the PCA and GoF criterion works naturally to deal with this tradeoff. The rest of the paper is organized as follows.We present our reconstruction method in Sec.II and briefly illustrate the current OHD and forecast future OHD in Sec.III.We show the results of our method in Sec.IV and conclude in Sec.V.II.METHODWe briefly show the mathematics of the reconstruction method in Sec.II.To test the method we use the new error model for simulated data,which is shown in Sec.II B,and the GoF criterion is discussed in Sec.II C.A.ReconstructionIn general relativity,the expansion of the Universe is affected by the densities of the components and the state of dark energy:*Corresponding author.tjzhang@PHYSICAL REVIEW D88,103528(2013)H ðz Þ2¼H 20½ M ð1þz Þ3þ K ð1þz Þ2þ Ãg ðz Þ ;(1)where H 0, M , K , Ãare the Hubble constant,current energy densities in pressureless nonrelativistic matter,cur-vature,and a smooth dark energy component,respectively,and M þ K þ ü1;and g ðz Þ¼exp ½3R z 0ð1þw ðz 0ÞÞ=ð1þz 0Þd z 0 .Here we neglect the current energy density of radiation R and assume the Universe to be dominated by nonrelativistic matter and dark energy.By expressing w ðz Þin terms of H ðz Þand H 0ðz Þ d H=d z ,we get the recon-struction equation:w ðz Þ¼3H 2À2ð1þz ÞHH 0À K H 20ð1þz Þ23H 20ð1þz Þ2½ M ð1þz Þþ KÀ3H 2:(2)Given a set of H ðz Þdata y ,we fit them with a smooth analytical function and then use it and its first derivative to reconstruct w ðz Þusing Eq.(2).Assume the data y ¼ðy 1;y 2;...;y n ÞT with covariance matrix C .By choos-ing a set of N (N <n )primary basis functions such as polynomials,rational functions,or wavelets,X ¼ðx T 1;x T 2;...;x TN Þ,where x i is a row vector representing the i th basis,we fit y by linear least squares.Simply minimize the weighted squared residual R ¼ðy ÀX ÞT C À1ðy ÀX Þby solving @R =@ ¼0,and we get the coefficient vector¼ðX T C À1X ÞÀ1X T C À1y :(3)With enough realizations from the error model,we diagonalize the inverse covariance matrix of by finding its N eigenvalue and eigenvectors:F ¼Cov À1ð Þ¼E ÃE T ,where E ¼ðe T 1;e T 2;...;e TN Þrearranges the N pri-mary basis functions to N new orthogonal eigenbasis U ¼X E with the corresponding eigenvalues diag ðÃÞ¼ð 1; 2;...; N ÞT .The first M (M N )eigenmodesU M ¼X E M ,where E M ¼ðe T 1;e T 2;...;e TM Þ,the principal components of the data,are usually of our interest,reflect-ing the main features of data.Conversely,the rest compo-nents are induced by the random offsets in the data and may induce overfittings.After the rearrangement,we solve Eq.(3)again and get new coefficients for the new basis:M ¼ðU T M C À1U M ÞÀ1U T M C À1y :(4)Because we have enough realizations to estimate Cov ð Þ,and any single new realization or observational data,hav-ing similar configurations,their true features can still be extracted and the nuisance features are excluded.With the reliable smooth H ðz Þ,getting w ðz Þis straightforward from Eq.(2),and its errors can be estimated from realizations.B.An optimal error modelUsually simulated offsets and errors are regarded as Gaussian distributed [17].More generally,the error,arandom variable ,is determined by several factors t ¼ðt 1;t 2;...;t k ÞT ,where these factors are assumed to be Gaussian distributed with covariance Æt .These factors are different sources of errors that jointly contribute to with a quadratic form 2¼t T D t ,and the matrix D de-notes the relation between the factor and the final error,up to second order accuracy.In such case, has a Nakagami m distribution f m ðx ;m; Þ(a scaling transform of generalized- distribution with parameters Æt and D )[19]and has a complicated form.We can never estimate the full contribution of these factors (weather,telescope,device,recording during observation,as well as data re-duction and systematic errors,etc.);however,we simplify the problem by assuming t i $N ð0;1Þ,Æt ¼D ¼I :they are independent,having the same importance,and contrib-ute to 2additively.In this case, $ k .More realisti-cally,there are few dominant factors of much greater importance (Æt ÞI )that jointly contribute to the final error.This effectively causes a reduction in the degree of freedom,k !k 0(k 0<k ),and a scaling transform ( k 0!A k 0).Practically,neglecting the mathematical details,we find that the m distribution f m ðx ;m; Þ(m ¼k 0=2, ¼A 2=k 0)well matches the relative error H =H ’s distribution and does not depend on redshift z .The redshift distribution is generated according to the configuration of each method of measurement.For a large enough sample,we find that uniformly distributed or evenly spaced samples are good approximations.For errors and offsets,we assume that the data points are indepen-dent,so the relative error is successively generated from the corresponding distribution =H ?ðz Þ$f i ,where f i is the relative error distribution for the i th kind of measure-ment.This means that we are ready for a measurement without knowing the true value y ?¼H ?ðz Þ,but the quality (error bar)is predetermined.For h f i i (1,the resulting measurement should have the distribution y $N ðy ?; Þ,and it gives the simulated data.C.Goodness of fitThe remaining problem is how to choose the number of primary basis functions N and the number of reserved principal components M appropriately.The choice of ðN;M Þdirectly relates to the upper limit of the ability of how completely we can detect the features of the under-lying model.If we suppose that the fitted model is just the underlying model,the offset y Ày ?,having the distribu-tion of N ð0; Þ,contributes to the residual R ?by ðN ð0;1ÞÞ2for each independent data point,and R ?has 2distribution R ?$ 2n .Thus,h GoF ?iR ?n ¼ðy Ày ?ÞT C À1ðy Ày ?Þn ¼1:(5)Here we use ?to denote that the fitted model is replaced bythe underlying model,and also define R ?=n as the good-ness of fit for underlying model GoF ?.Going back to theHAO-RAN YU,SHUO YUAN,AND TONG-JIE ZHANGPHYSICAL REVIEW D 88,103528(2013)resultingfitted model,we define the GoF in our circum-stance as1GoFR MnÀ1;(6)where R M is the least square R min given by thefirst M principal components U M:R M¼ðyÀU M MÞT CÀ1ðyÀU M MÞ:(7) Statistically,h GoF i should also be unity.If it is lessthan1,it indicates the overfitting of offsets due to the measurement error.If GoF is larger than1by a greatamount,it means that we have not yet captured the fullfeatures of the data;i.e.,the model is too simple tofit allthe features.We use GoF as the indicator to determine thecomplexity of ourfitted model.Here,the complexity of thefitted model is less than or equal to the true underlyingmodel,because errors and offsets lower the detectability ofthe underlying model.More specifically,for a very com-plex oscillating wðzÞ,as an example,it always allows itsgenerated data to have GoF?’1,and we are supposed to use higher N and M tofit its complex features.However,ifthe generated data are dominated by noise,such configu-ration(N and M)leads to illness infitting low quality data,because the errors and offsets are more dominant than thetrue features,and thus are amplified,and any subtler fea-tures are covered.As a result,the reconstructed model is no longer the underlying model and usually has much smaller GoF(GoF<GoF?’1).For a given large enough N,full usage of all eigenmodes(M¼N)leads to the overfitting,and we degrade thecomplexity of the model by reducing M consecutivelywhile examining h GoF i over realizations,until wefindthe last M to have h GoF i>1.It is still safe to use thisgrade of complexity.An insufficient number of primary basis functions N causes two consecutive M’s to have a great difference in h GoF i,skipping the range of appropriate fitting(h GoF i’1),since the eigenmodes are poorly deter-mined from a limited number of primary functions,or the primary functions X are chosen improperly.In these cases we should either increase N or choose more suitable X. Without clear knowledge of the essence of dark energy, the underlying complexity of wðzÞresults in innumerable forms of HðzÞ’s,so generally there is not an optimal choice of primary function basis X.However,we can still choose some popular,reasonable models to see how different X’s have an effect on thefiually polynomials are more effective than other rational functions for not-too-complexmodels,and they form stable eigenmodes that are invariantfor different values of N and various underlying HðzÞ,even if the underlying HðzÞis very oscillatory.III.A V AILABLE AND FUTURE HUBBLEPARAMETER DATACurrent OHD are obtained primarily by the method ofcosmic chronometers[20–23].Other methods to extractHðzÞare by the observations of BAO peaks[14,24]and Ly- forest of luminous red galaxies(LRGs)[25],the lastof which extended the current OHD deeply to z¼2:3. For the real data applied to our method,it is straightfor-ward to test their GoF?.Assuming the independence of28 measurements,to calculate the residual between the data and afiducial theoreticalÃCDM(cold dark matter with a constant cosmological constantÃ)model gives GoF?¼0:62<1,meaning that for independent data with current error level,their offsets would have been larger.It indicates that the assumption of independence for the current28 OHD is not proper.However,we do not have a good estimation of the off-diagonal elements of the OHD’s covariance matrix.To weigh the power of current OHD and compare with simulations,we rebin the data from LRGs that have close redshifts,and getfinally15mea-surements of OHD with smaller error bars(see Fig.1). Now for the binned data GoF?¼1:02,which is close to independent measurements.We have a larger residual contributing to R statistically from each binned datum, and it is reasonable from the error.Although this is only a rough estimation,it is still more accurate than the28data points with no knowledge of their covariance.The binned and unbinned error distributions for OHD well match the shape of m distribution(see the left panel of Fig.1).We also assume the relative error of future data to have such distribution.There are several ways to enhance the quality of OHD,ofwhich deeper-redshift,more-complete-sky-coverage LRGsurvey and spectroscopic observations of those identifiedLRGs give remarkable improvement.For example,the2SLAQ2has provided a LRG catalogue with the redshiftrange from0.3to0.9with180deg2coverage of the sky.Considering a future LRG survey with more than half skycoverage with redshift range z$2:3,it may give several millions of LRGs and effectively enlarges the number of OHD data points or lowers their ing a LRG sample binning strategy[20],we can extract up to100 OHD measurements with20%of the present error level. Other methods also have potential:[24]gives three OHD by processing the WiggleZ3survey andfitting the BAO peak parameter and the2D power spectrum at three red-shift slices.The raw WiggleZ samples are158741galaxies1Note that,although it is usual to scale RM by the degree offreedom ¼nÀMÀ1,here we instead use nÀ1to scale R M for the estimated underlying model from n data samples,because various choices of primary basis functions and inertial complex-ity of the underlying model lead to different numbers of pa-rameters needed.Even given afixed underlying model,resulting N and M depend on X.Thus,the expression of GoF should not be scaled by anything in terms of N or M in this circumstance.2/.3.au/site/.NONPARAMETRIC RECONSTRUCTION OF DYNAMICAL...PHYSICAL REVIEW D88,103528(2013)in the range z ¼ð0:2;1:0Þwith 800deg 2coverage of the sky.We can also forecast a more-than-half-sky survey like WiggleZ,which offers up to five million targets and thus lowers the error level to several percent of the present level.The more ambitious experiment for Sandage-Loeb signal (SLS),proposed by [15,16],may further deepen the red-shift range of OHD.It measures the quasar Ly- forest in a separation of a few decades with an extremely large telescope like the European Extremely Large Telescope (E-ELT).4The upcoming CODEX (COsmic Dynamics and EXo-Earth experiment)5is based on the E-ELT and offers a measurement of SL signal.If successful,it can help us to explore the redshift from 2to 5covering the ‘‘redshift desert’’and give useful data for the expanding history of the Universe [26].The CODEX group provided a full design for observing the SL signal and the prediction of the statistical error of SLS [27].We use the SL signal,with an error estimation by [28](a 15year observational inter-val is assumed),as optional simulated data to study their impact on the result.IV .RESULTSWe set cosmological parameters M , K , Ã,and H 0as in the last Planck data release [29].For the diagnostic EoS models,we choose ÃCDM with w Ãðz Þ¼À1and two other arbitrary models w 1ðz Þ¼À1=2þerf ðln ð2z=e ÞÞand w 2ðz Þ¼À1À0:31sin ð12ln ð1=ð1þz ÞÞÞ,where in model 1,w 1smoothly varies from À1to 0as z increases,while in model 2,w 2is very oscillatory.The theoretical H ðz Þcurves based on these two models are shown in dash-dotted lines in the top right panel of Fig.1.We also show the dashed blue line,representing the best-fit analytical H ðz Þcurve by using 15binned OHD.Its reconstruction of w ðz Þis shown in the bottom right panel of Fig.1.We do not show errors for these two dashed blue lines—usually Monte Carlo realizations are run on each data point,y MC $N ðy; Þ,to get the statistical properties.However,recall that y $N ðy ?; Þ,so y MC $N ðy ?;ffiffiffi2p Þ:its error is amplified,and also we have only one realization—real observation,y MC ,is biased by y Ày ?,due to the cosmic variance.For this reason we can only get an error estimation based on a supposed underlying model,e.g.,ÃCDM ,as-suming y is just one realization of y ?.We calculate the statistics from other realizations of y ?,y MC $N ðy ?; Þ,and see if the reconstruction from the real data is within the error region of y MC .We use our error model to simulate data and do this Monte Carlo realization.Here we use only cosmic chronometer data,with 100independent measure-ments,20%of the present error level,evenly distributed on 0<z <2:3.The results are shown with expectations (or-ange lines)and 1 of their error regions (translucent orange areas)in Fig.1.For H ðz Þ,it reasonably covers the H ðz Þby underlying ÃCDM .w ðz Þis confident when z &1:5,while beyond this range the reconstruction is biased due to the scarceness of data,and when z ’2it is hopeless because H 0is poorly paring the result (blue dashed line)with the error region,we still see an obvious $1:5 deviation from ÃCDM at 1:6&z &2,and it does not correlate with the bias of the central line of the error region.Although we note that this feature is also similar to theresultFIG.2(color online).Top left:Reconstruction of w ðz Þby OHD’s redshift and error configurations,but assuming model 1.Also shown as the blue dashed line is the reconstruction of the OHD set,which is obviously inconsistent with model 1.The remaining three panels show the reconstruction of w ðz Þfrom simulated future data,with the underlying models being ÃCDM ,model 1,and model2.FIG.1(color online).OHD.The purple and green of unbinned 28OHD and curves are their best fits with an m distribution.Their counterpart CDF and fitted CDF are shown in the inset.Right:Binned OHD and their reconstructions on H ðz Þ(top)and w ðz Þ(bottom).The shaded orange areas show the 1 error regions if we assume a ÃCDM model.Dashed blue lines are the results from binned OHD.4/public/teles-instr/e-elt.html .5http://www.iac.es/proyecto/codex/.HAO-RAN YU,SHUO PHYSICAL REVIEW D 88,103528(2013)from Ia SNe[11],it could not be verified by few data with low quality around1<z<2and a single datum(better quality)at z¼2:3.Here a single datum at z¼2:3[25], which is by BAO features in the redshift range2:1<z< 3:5,plays an important role in determining H and H0,which sensitively tune the resulting wðzÞ.Thus,further,more precise measurements at high redshift are needed.Our forecast of future data has proved to be able to verify or refute this deviation.The top left panel of Fig.2shows another Monte Carlo simulation,withÃCDM replaced by model1,and we can see that the reconstructed line by OHD is obviously excluded by this model.The remaining three panels in Fig.2show the results from simulated future OHD with the underlying models beingÃCDM,model1,and model2,respectively.Note that,for varying qualities of data and underlying model complexity,ðN;MÞare auto-matically adjusted,and are no longer suitable for current OHD,so we do not include current reconstructions.We can see that future OHD are able to reconstruct wðzÞvery accurately,even for very oscillatory models.V.DISCUSSION AND CONCLUSIONWe propose a new method by combining principal com-ponent analysis(PCA)and the goodness offit(GoF)crite-rion to reconstruct a dark energy equation of state wðzÞwith observational Hubble parameter data.We also used a new error model to simulate the error distributions of future OHD and get forecasted simulated data by estimating po-tential surveys and data acquisition methods.In the GoF criterion analysis,we calculate the residual between current 28OHD measurements and the concordanceÃCDM model andfind that the residual GoF? R?=n¼0:62(n¼28) is far from unity,which implies that these measurements should not be considered independent and thus it is im-proper to use a diagonal covariance matrix in the linear least squares.We bin the data by combining nearby redshift dataand get15newer measurements of OHD.They seem to beindependent—their GoF?¼1:02.We note that this is only a rough estimation,and generally we need to get the covari-ance between the measurements.However,there is noestimated covariance for OHD,so manually making themindependent is just for comparing the power of current andfuture data on the EoS reconstruction.We use our method to reconstruct EoS wðzÞby thecurrent OHD,and discover a feature of deviation fromÃCDM at z>1:5.The Ia SN data give similar results[11].While the quality of current data cannot verify it,future data from our simulations greatly enhance the result(Fig.2)and are able to confirm or deny this deviation.Inthe analysis we use only cosmic chronometer data.We alsouse simulations with the data from other sources(BAO,SLsignals),and the result does not improve much,because thequantity of three BAO data andfive SL data dominatesonly a small fraction of total100simulated data.However,with a small number of cosmic chronometer data(say,20),adding several SL signal data lowers the error of recon-struction at z’2,but beyond this redshift the result is stillnot confident.The reason is that adding a few high-redshiftdata helps to determine H0better at z’2but is still unableto determine H0well at2&z&5.In such a case we mayuse a derivative prior in Eq.(3)or use a Gaussian process[30]to help to determine H0.ACKNOWLEDGMENTSThis work was supported by the National ScienceFoundation of China(Grant No.11173006),the Ministryof Science and Technology National Basic Science pro-gram(project973)under Grant No.2012CB821804,and the Fundamental Research Funds for the CentralUniversities.[1] A.G.Riess et al.,Astron.J.116,1009(1998).[2]S.Perlmutter et al.,Astrophys.J.517,565(1999).[3]Y.Wang and M.Tegmark,Phys.Rev.Lett.92,241302(2004).[4]M.Chevallier and D.Polarski,Int.J.Mod.Phys.D10,213(2001).[5] E.V.Linder,Phys.Rev.Lett.90,091301(2003).[6]V.Sahni,A.Shafieloo,and A.A.Starobinsky,Phys.Rev.D78,103502(2008).[7]G.-B.Zhao,R.G.Crittenden,L.Pogosian,and X.Zhang,Phys.Rev.Lett.109,171301(2012).[8]R.A.Daly and S.G.Djorgovski,Astrophys.J.612,652(2004).[9]R.A.Daly,S.G.Djorgovski,K.A.Freeman,M.P.Mory,C.P.O’Dea,P.Kharb,and S.Baum,Astrophys.J.677,1(2008).[10] D.Huterer and G.Starkman,Phys.Rev.Lett.90,031301(2003).[11] C.Clarkson and C.Zunckel,Phys.Rev.Lett.104,211301(2010).[12]Z.-L.Yi and T.-J.Zhang,Mod.Phys.Lett.A22,41(2007).[13]R.Jimenez and A.Loeb,Astrophys.J.573,37(2002).[14] E.Gaztan˜aga,A.Cabre´,and L.Hui,Mon.Not.R.Astron.Soc.399,1663(2009).[15] A.Sandage,Astrophys.J.136,319(1962).[16] A.Loeb,Astrophys.J.Lett.499,L111(1998).[17] C.Ma and T.-J.Zhang,Astrophys.J.730,74(2011).[18] A.R.Liddle,Mon.Not.R.Astron.Soc.377,L74(2007).[19]J.Sheil and I.O’Muircheartaigh,J.Roy.Stat.Soc.C Appl.Stat.26,92(1977).NONPARAMETRIC RECONSTRUCTION OF DYNAMICAL...PHYSICAL REVIEW D88,103528(2013)[20]J.Simon,L.Verde,and R.Jimenez,Phys.Rev.D71,123001(2005).[21] D.Stern,R.Jimenez,L.Verde,S.A.Stanford,and M.Kamionkowski,Astrophys.J.Suppl.Ser.188,280(2010).[22]M.Moresco et al.,J.Cosmol.Astropart.Phys.8(2012)006.[23] C.Zhang,H.Zhang,S.Yuan,T.-J.Zhang,and Y.-C.Sun,arXiv:1207.4541.[24] C.Blake et al.,Mon.Not.R.Astron.Soc.425,405(2012).[25]N.G.Busca et al.,Astron.Astrophys.552,A96(2013).[26]P.-S.Corasaniti,D.Huterer,and A.Melchiorri,Phys.Rev.D75,062001(2007).[27]J.Liske et al.,Mon.Not.R.Astron.Soc.386,1192(2008).[28]M.Martinelli,S.Pandolfi,C.J.A.P.Martins,and P.E.Vielzeuf,Phys.Rev.D86,123001(2012).[29]Planck Collaboration,arXiv:1303.5076.[30]M.Seikel,S.Yahya,R.Maartens,and C.Clarkson,Phys.Rev.D86,083001(2012).HAO-RAN YU,SHUO YUAN,AND TONG-JIE ZHANG PHYSICAL REVIEW D88,103528(2013)。