基于Simulink的时滞系统模糊控制器的设计毕业设计论文
基于SIMULINK磁流变阻尼结构模糊控制器的仿真
基于SIMULINK 磁流变阻尼结构模糊控制器的仿真引 言磁流变减振器是一种阻尼可控器件,其工作原理是调节励磁线圈中的电流获得不同强度的磁场,使阻尼通道中磁流变液的流动特性发生变化,从而改变减振器的阻尼力。
磁流变减振器具有调节范围宽、功耗低、响应速度快、结构简单等特点,在汽车、建筑、航空航天等领域具有应用广阔前景。
本文采用模糊控制器实现磁流变阻尼器在振动过程中电流参数的选择。
此外, 在模糊控制器的设计中,隶属函数和模糊规则的确定对系统的减震控制效果有着显著影响,为此本文对采用不同隶属函数和模糊规则的模糊控制器进行了比较分析,并对一加有磁流变阻尼器的5层建筑结构进行实例仿真分析。
1. 磁流变阻尼器的力学模型Bingham 模型是磁流变阻尼器常采用的力学模型之一,其应力和应变的关系为:sgn()y ττηγ=⋅+ (1)式中,τ为磁流变液的剪应力;γ 为剪切应变速率;y τ为由磁场引起的剪切屈服应力(是电流的函数);η为流体的动力粘度;sgn()⋅为符号函数。
根据Bing-ham 流体在窄缝中流动的压力梯度方程,可得磁流变阻尼器力学分析模型:2d 3123()sgn(())py P LA L F x t A xt Dh h ητπ=+ (2) 式中,,L 为活塞的有效长度;D 为缸体的内径;d 为活塞轴直径;h 为活塞与缸体间的间隙;()xt 为活塞与缸体间的相对运动速度;P A 为活塞的有效面积22()4P A D d π=-;η为磁流变液的表观粘度系数。
由于剪切屈服应力y τ与磁场强度有关,所以y τ是控制电流的函数。
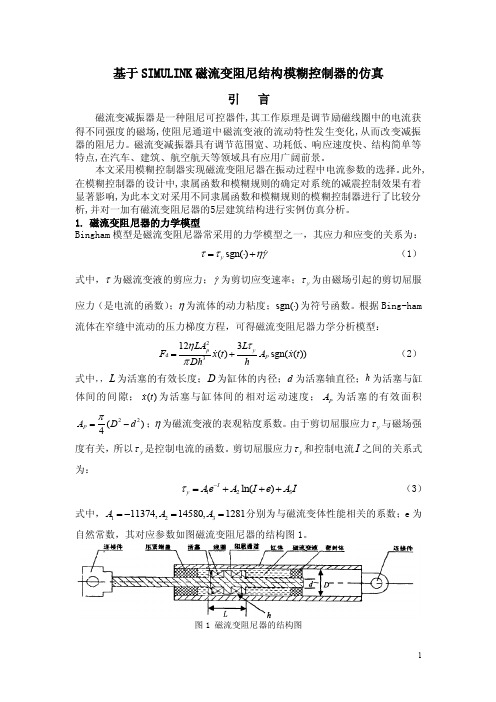
剪切屈服应力y τ和控制电流I 之间的关系式为:123ln()I y Ae A I e A I τ-=+++ (3) 式中,12311374,14580,1281A A A =-==分别为与磁流变体性能相关的系数;e 为自然常数,其对应参数如图磁流变阻尼器的结构图1。
图1 磁流变阻尼器的结构图从磁流变阻尼器的力学模型可以看出,影响磁流变阻尼器输出力的主要因素有:磁流变液的最大屈服强度、体积流量(与缸体内径和活塞杆直径有关)、导磁区长度及导磁区内活塞与缸体间隙的宽度。
word版本hslogic_基于Simulink的自适应模糊控制器

基于Simulink的自适应模糊控制器1.从论文的结构中可以看到,整个系统的完整结构为:那么系统的自适应模糊控制模块可以简化为如下的结构:只不过模糊输入的三个变量都是通过输出反馈得到的数据,从而构成自适应反馈系统。
按论文中的说法:航向角偏差,舷摇角速度,航迹偏差,输出为命令舵角。
由于您要求的是完全按照论文的要求做,所以下面我们开始根据论文的要求分步骤设计:设计准备初始路经数据xd和yd的产生。
具体查看以下函数。
这个是默认六个点P1,P2,P3,P4,P5,P6图,我们需要得到点之间的路经的坐标。
其结果如下:在matlab的workspace中,我们可以看到,我们得到了中间点坐标。
共6004个。
具体点的个数可以根据实际的需要进行求解。
首先我们要弄的是如下的结构:下面开始编辑模糊模块fis文件。
打开并运行得到如下的窗口。
下面我们根据论文中的要求进行编辑。
其结果如下所示:模糊规则如下所示:共49个规则。
这样就定义好了fis文件下面在用simulink搭建模块之前,需要加载fis文件,运行如下的代码。
这样的话,我们就完成了整个系统的核心部分,模糊模块,下面要在simulink构建仿真环境。
第二部分,我们将介绍自适应模糊系统的设计与实现。
注意论文的conditions模块是归一化模块,就是将输入的信号的幅度变为-3.3之间。
具体的理论是,假设输入的信号是x1,x2,x3,x4,………………..则conditions的计算公式是x = 3*x/max(x1,x2,x3,。
)本系统,信号源采用的是m文件生成的数据,在simulink中自动加载进去。
由公式其中xd和yd就是导入的数据。
真个模块如下所示:首先在simulink中需要构建一个求反正切的模块,由于反正切没有直接模块,我们需要用查找表进行设计。
找到这个模块。
双击:点击EDIT这里就是查找表的内容,我们可以增加数值,实现查找表。
完成反正切后的表格如下所示:这样设置以后,然后OK,就能生成反正切的表格了。
基于Simulink的时滞系统模糊控制器的设计毕业设计论文

一、原始依据(包括设计或论文的工作基础、研究条件、应用环境、工作目的等。
)工作基础:了解时滞系统的基本概念,熟练使用MATLAB 7软件。
研究条件:Smith预估控制器的基本原理与模糊控制器的MATLAB Fuzzy 工具箱。
应用环境:基于模糊Smith控制器的大时滞被控对象的Simulink仿真。
工作目的:熟练掌握MATLAB Simulink工具箱。
了解智能控制的基本概念,模糊数学的基本内容以及模糊控制器设计的基本方法。
完成基于模糊Smith预估控制器的仿真设计。
二、参考文献[1] 王志萍.带有Smith预估器的模糊控制系统仿真研究[J].上海电力学院学报. 2004(02).矚慫润厲钐瘗睞枥庑赖。
[2] 储岳中,陶永华. 基于MATLAB的自适应模糊PID控制系统计算机仿真[J]. 安徽工业大学学报(自然科学版). 2004(01) .聞創沟燴鐺險爱氇谴净。
[3] 尹明,董振银,宋利君.模糊PID在电炉温度控制中的应用[J]. 齐齐哈尔大学学报. 2003(02) .残骛楼諍锩瀨濟溆塹籟。
[4] 张涛,李家启.基于参数自整定模糊PID控制器的设计与仿真[J].交通与计算机. 2001(S1).酽锕极額閉镇桧猪訣锥。
[5] 周荔丹,童调生.模糊PID在电阻加热炉温控系统中的应用[J].自动化与仪器仪表. 2001(05) .彈贸摄尔霁毙攬砖卤庑。
[6] 饶翡鹏,王东云,凌德麟.模糊控制的发展和现状[J]. 郑州纺织工学院学报. 2000(03).謀荞抟箧飆鐸怼类蒋薔。
三、设计(研究)内容和要求(包括设计或研究内容、主要指标与技术参数,并根据课题性质对学生提出具体要求。
)厦礴恳蹒骈時盡继價骚。
1、了解模糊控制系统的基本概念与原理。
2、用MATLAB 7中的Fuzzy Control工具箱完成基于某大迟滞环节的模糊控制器的设计。
3、对比分析传统PID、Smith预估控制器以及单纯模糊控制器的优缺点。
毕业设计(论文)--基于simulink的模糊pid控制器设计与实现

哈尔滨商业大学毕业设计(论文)基于Simulink的模糊PID控制器设计与实现学生姓名指导教师李晖专业电子信息工程学院计算机与信息工程学院二〇一四年六月七日Graduation Project (Thesis)Harbin University of CommerceThe Design and Realization of Fuzzy-PID Controller Based on SimulinkStudentSupervisor Li HuiSpecialty Electronic Information EngineeringSchool Computer and Information Engineering2014-6-7毕业设计(论文)任务书毕业设计(论文)审阅评语毕业设计(论文)审阅评语毕业设计(论文)答辩评语摘要科学技术和人工智能的不断发展,促使自动控制向智能控制的方向发展,作为一种新的控制技术,智能控制已经在越来越多的控制领域得到了广泛的应用。
PID控制是最为传统的一种控制技术,自18世纪引入控制领域以来,一直保持着它在工业工程控制的主导地位,被誉为控制领域的常青树,据统计工业控制的控制器中PID类控制器占90%以上。
PID控制器是最早出现的控制器类型,因为其结构简单,各个控制器参数有着明显的物理意义,调整方便,所以这类控制器深受工程技术人员喜爱。
模糊控制是以集合论、模糊语言变量与模糊逻辑推理为基础,以先验知识和专家经验为控制规则的一种智能控制技术。
由于其可以从行为上摸你人的模糊推理和决策过程;不需要对象的数学模型既可以实现比较好的控制;可以实现非线性控制。
在众多领域获得了成功的应用。
关键词:PID控制;模糊控制;MATLAB/SIMULINK;模糊PID控制AbstractScience technology and artificial intelligences develop continuously, which urge the automatic control toward the direction of development that intelligence control, being a kind of new control technique, the intelligence control has already got the extensive application in more and more control realms.The PID control is the most traditional control technique, which has been keeping predominant position at the industry process control since it was led into the control realm in 18 centuries, it was called the evergreen tree of the control realm. According to the covariance, PID controller has 90% above of the controllers in the industry control. To the engineering technical personnel’s fancy, for its structure is simple, each controller parameter has the obvious physics meaning, and adjusting is convenient.The fuzzy control, which is based on the gathering theory, fuzzy language parameters and fuzzy logic theories, with the control rule of checking knowledge and expert’s experiences, is a kind of intelligence control technique. The fuzzy control can imitate the person’s faintness to reason logically and make policy from the behavior, can realize better control without the mathematics model of the object, can carry out no line control, so it has strong vitality.Keywords:PID Control, Fuzzy Control, MATLAB/SIMULINK, Fuzzy PID Control目录摘要 (I)Abstract (II)1绪论 (1)1.1研究目的和意义 (1)1.2国内外研究现状 (1)1.3论文研究内容 (3)2PID控制和模糊控制理论概述 (5)2.1PID控制技术概述 (5)2.1.1 PID控制算法 (5)2.1.2 PID控制器组成 (6)2.1.3 PID控制特点 (8)2.2模糊控制技术概述 (9)2.2.1 模糊逻辑 (9)2.2.2 模糊控制算法 (10)2.3本章小结 (13)3模糊PID控制器设计 (14)3.1模糊PID控制器基本原理 (14)3.2模糊PID控制器结构设计 (16)3.3 本章小结 (19)4模糊PID控制器开发环境 (20)4.1Matlab开发环境简介 (20)4.2Simulink工具箱简介 (20)4.3本章小结 (21)5基于Simulink的模糊PID控制器仿真 (22)5.1Simulink仿真模块 (22)5.2仿真分析 (22)5.3本章小结 (23)结论 (24)参考文献 (25)致谢 (26)附录 (27)1绪论1.1研究目的和意义现在越来越多的新型自动控制技术应用于实践,控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
【毕业论文】调速系统智能控制器设计(模糊控制算法设计及仿真)

目录一、绪论 (2)1、电力机车简介 (2)2、现有电力机车调速系统存在的问题 (3)3、电力机车调速系统的改进 (3)4、电力机车控制系统的发展方向 (3)5、课题意义 (4)6、论文内容 (4)二、模糊控制基本原理 (5)1、模糊控制简介 (5)2、模糊控制的产生与发展 (5)3、模糊控制的特点 (7)4、模糊控制基本方法 (7)5、模糊控制器的组成框图.................................... .. (8)6、模糊控制器结构及其分类 (9)7、二维模糊控制器 (9)三、电力机车转速模糊控制算法设计 (10)1、电力机车模糊控制调速系统总体结构 (10)2、电流调节器的选择 (12)3、转速调节器模糊控制算法设计 (12)(1)模糊控制器结构设计 (12)(2)控制器输入量的模糊化和输出去模糊 (13)(3)模糊控制规则的设计 (13)(4)模糊控制算法流程图 (16)四、建立仿真模型 (18)1、仿真简介 (18)2、电力机车仿真 (18)3、传统PID控制的机车调速系统的仿真模 (19)4、模糊电力机车调速系统的仿真模型 (20)5、应用MATLAB构造模糊控制器 (21)五、仿真及结果分析 (24)1、传统PID控制机车调速系统仿真图 (24)2、模糊控制机车调速系统仿真图 (25)3、仿真结果分析 (26)结束语 (27)个人总结 (28)参考文献 (28)调速系统智能控制器设计(模糊控制算法设计及仿真)中文摘要:电力机车牵引传动控制装置作为电力机车的关键技术设备之一,有着机车“神经中枢”和“大脑”之称。
目前我国电力机车传动控制系统多采用基于特性控制和闭环控制结构,其电流、转速调节器分别是由以模拟运算放大器为主要元件构成的模拟调节器。
这种模拟式调节器参数固定,控制结构简单、稳定性较好、易于工程实现。
但系统的调节过程过分依赖于控制对象的模型参数,且控制系统动态性能和鲁棒性较差。
(完整版)基于SIMULINK的Fuzzy-PID控制器设计

基于SIMULINK的Fuzzy-PID控制器设计一、基本要求设计一种Fuzzy-PID控制算法,利用MATLAB的SIMULINK进行仿真研究,根据实验结果比较Fuzzy-PID控制算法与普通的PID算法的的抗干扰能力和鲁棒性及动、静态控制精度。
提示:已知某典型工业过程的传递函数为:G(s) =120/(4200s2+170s+1)应用模糊集合理论,建立参数与系统误差和误差变化率之间的二元连续函数关系,并用模糊控制器根据不同的Kp、Ki和Kd误差和误差变化率在线自整定PID参数。
二、理论基础传统的PID线性控制器根据被控对象的不同,适当的调整PID参数,可以获得比较满意的控制效果。
然而,传统PID控制器的线性特性只有在工作点附近才能获得较理想的效果,当偏离工作点较远时,由于控制对象的非线性,系统的性能会变差,甚至不稳定。
而模糊控制方法无需建立被控对象的数学模型,在偏离工作点的区域可明显改善控制的动态性能,同时对噪声也有较强的抑制能力,鲁棒性较好。
但模糊控制器的本质上属于非线性控制方法,消除系统误差的性能较差,难以达到较高控制精度。
单纯采用PID控制和Fuzzy控制都不会取得较好的控制效果,二采用Fuzzy-PID 控制方式是一种较好的控制方法。
它能发挥Fuzzy控制鲁棒性强、动态响应好、上升时间快、超调量小的特点,同时又具有PID控制器的动态跟踪品质和稳态精度。
模糊控制器的基本组成,如图1所示。
图1模糊控制器基本组成模糊控制器主要由模糊化接口、模糊推理、清晰化接口和知识库4部分组成。
模糊化接口的作用是将输入的精确量转化为模糊化量,并用相应的模糊集合来表示。
模糊推理是模糊控制器的核心,它具有模拟人的基于模糊概念的推理能力,该推理过程是基于模糊逻辑中的蕴含关系及推理规则来进行的。
清晰化接口的作用是将模糊推理得到的控制量变换为实际用于控制的精确控制量。
知识库中包含了具体应用领域的知识和要求的控制目标,它通常由数据库和模糊控制规则两部分组成。
基于SIMULINK的无刷直流电机模糊PID控制策略研究
基于SIMULINK的无刷直流电机模糊PID控制策略研究邓志良;易兴邦【摘要】Based on analyzing the mathematical model of square-wave brushless DC motor,aiming at the typical operating mode of the 2-phase turn-on 3-phase 6-state with wye-connected,the paper proposes a fuzzy PID control strategy.A fuzzy PID control strategy simulation model is established on Matlab/Simulink platform and then fuzzy PID of brushless DC motor model is also simulated by changing parameters.The control results are compared with that of fuzzy PID and conventional PID control.The results of simulation indicate that the system has the advantages of strong robustness,fast response time and high steady-state accuracy.%在分析方波型永磁无刷直流电动机(BLDCM)数学模型的基础上,针对典型的两相导通星型三相六状态工作方式的无刷直流电动机,提出了一种模糊PID控制方法,在Matlab/Simulink平台上建立了无刷直流电机模糊PID控制策略的仿真模型,改变参数后,对其也进行了仿真,并且将模糊PID控制和传统PID控制的控制效果进行了比较。
模糊自适应PID控制器及Simulink仿真(本科论文 毕业论文)

模糊自适应PID控制器及Simulink仿真作者姓名专业电气工程及其自动化指导教师姓名专业技术职务讲师山东轻工业学院本科毕业设计(论文)原创性声明本人郑重声明:所呈交的毕业设计(论文),是本人在指导教师的指导下独立研究、撰写的成果。
设计(论文)中引用他人的文献、数据、图件、资料,均已在设计(论文)中加以说明,除此之外,本设计(论文)不含任何其他个人或集体已经发表或撰写的成果作品。
对本文研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示了谢意。
本声明的法律结果由本人承担。
毕业设计(论文)作者签名:2012年6月6日山东轻工业学院关于毕业设计(论文)使用授权的说明本毕业设计(论文)作者完全了解学校有关保留、使用毕业设计(论文)的规定,即:学校有权保留、送交设计(论文)的复印件,允许设计(论文)被查阅和借阅,学校可以公布设计(论文)的全部或部分内容,可以采用影印、扫描等复制手段保存本设计(论文)。
指导教师签名:毕业设计(论文)作者签名:年月日2012年6月6日目录摘要 (1)ABSTRACT (1)第一章绪论 (1)1.1PID控制器的发展与应用 (1)1.2PID控制器参数设置中存在的问题 (2)模糊自适应PID控制器发展研究现状 (2)1.4本文的主要工作 (4)第二章 PID控制原理简介 (4)引言 (4)2.2PID控制原理 (5)2.3PID控制器系统概述 (5)2.3.1比例控制(P) (7)2.3.2 积分调节(I) (7)微分调节(D) (9)第三章 PID控制器应用技术简介 (10)数字PID控制算法原理 (11)位置式PDI控制算法 (11)3.3控制规律的选择 (12)3.4PID控制器的参数整定 (13)第四章模糊PID控制器及系统仿真 (13)模糊自适应PID控制系统 (13)4.2常规PID和模糊自适应PID控制系统的仿真比较 (14)常规PID控制系统仿真 (14)模糊自适应PID控制系统仿真 (16)二者的比较 (18)第五章总结 (20)参考文献 (23)致谢 (24)摘要随着工业生产的发展,于20世纪30年代,美国开始使用PID功调节器,它比直接作用式调节器具有更好的控制效果,因而很快得到了工业界的认可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、原始依据(包括设计或论文的工作基础、研究条件、应用环境、工作目的等。
)工作基础:了解时滞系统的基本概念,熟练使用MATLAB 7软件。
研究条件:Smith预估控制器的基本原理与模糊控制器的MATLAB Fuzzy 工具箱。
应用环境:基于模糊Smith控制器的大时滞被控对象的Simulink仿真。
工作目的:熟练掌握MATLAB Simulink工具箱。
了解智能控制的基本概念,模糊数学的基本内容以及模糊控制器设计的基本方法。
完成基于模糊Smith预估控制器的仿真设计。
二、参考文献[1] 王志萍.带有Smith预估器的模糊控制系统仿真研究[J].上海电力学院学报. 2004(02).[2] 储岳中,陶永华. 基于MATLAB的自适应模糊PID控制系统计算机仿真[J]. 安徽工业大学学报(自然科学版). 2004(01) .[3] 尹明,董振银,宋利君.模糊PID在电炉温度控制中的应用[J]. 齐齐哈尔大学学报. 2003(02) .[4] 张涛,李家启.基于参数自整定模糊PID控制器的设计与仿真[J].交通与计算机. 2001(S1).[5] 周荔丹,童调生.模糊PID在电阻加热炉温控系统中的应用[J].自动化与仪器仪表. 2001(05) .[6] 饶翡鹏,王东云,凌德麟.模糊控制的发展和现状[J]. 郑州纺织工学院学报. 2000(03).三、设计(研究)内容和要求(包括设计或研究内容、主要指标与技术参数,并根据课题性质对学生提出具体要求。
)1、了解模糊控制系统的基本概念与原理。
2、用MATLAB 7中的Fuzzy Control工具箱完成基于某大迟滞环节的模糊控制器的设计。
3、对比分析传统PID、Smith预估控制器以及单纯模糊控制器的优缺点。
4、在此基础上,完成模糊PID的算法仿真。
指导教师(签字)年月日审题小组组长(签字)年月日北京理工大学本科生毕业设计(论文)开题报告课题名称基于Simulink的时滞系统模糊控制器的设计系名信息工程系专业自动化学生姓名指导教师一、课题来源及意义在工业过程控制领域中,许多被控对象都不同程度存在着时滞现象,因此,时滞系统是一种在工业生产中广泛存在的。
任何实际系统的过去状态不可避免地要对当前的状态产生影响,即系统的演化趋势不仅依赖于系统当前的状态,也依赖于过去某一时刻的状态,这类系统统称时滞系统。
系统时滞产生的原因很多:可能由测量元件或测量过程造成,也可能由控制元件和执行元件造成,或者由它们共同造成。
1957年O.J.M.Smith首次提出预估控制器,这是一个时滞补偿的预估算法。
它通过估计对象的动态特性,用一个预估模型作为补偿,从而得到一个没有时滞的被调节量反馈到反馈器,实现了将纯滞后环节移到闭环控制回路之外,从而有效地消除了纯滞后对控制系统的影响。
但是它过分依赖于精确数学模型,工业过程中不可能获得被控对象的精确数学模型,因此很难运用。
1956年美国的Zadeh首次提出模糊集合的概念,1974年伦敦大学的Mamdani 成功地将模糊控制理论应用于锅炉和汽轮机的过程控制。
模糊控制主要是模拟人的思维,推理和判断的一种方法,因其能很好的避免传统Smith预测控制的缺点,所以已经广泛应用于各个领域。
由于时滞的存在严重影响了系统的控制效果和稳定性,导致系统的超调变大,调节时间变长,甚至出现振荡和发散。
提高了系统的响应速度和系统的稳定性,因此提出简单,有效,实用的大时滞控制方法是很有意义的。
二、国内外发展现状模糊控制技术是一项正在发展的技术,在短短20多年时间里,模糊控制得到长足发展。
它的应用领域涉及各各方面,控制方法也有广很大进展,模糊控制器的性能不断提高。
多年来一直未解决的稳定性分析问题正在逐步解决。
模糊芯片也已研制成功且功能不断加强,成本不断下降。
各种模糊产品充满了日本、西欧和美国市场,如模糊洗衣机、模糊吸尘器和模糊摄像机等等,模糊技术几乎变得无所不能,各国都争先开发模糊新技术和新产品。
三、研究目标熟练掌握MATLAB Simulink工具箱。
了解智能控制的基本概念,模糊数学的基本内容以及模糊控制器设计的基本方法,完成基于模糊Smith预估控制器的仿真设计。
四、研究内容主要研究在工业过程中的得到大量应用的PID控制、Smith预估控制和模糊控制在多变量时滞系统中的应用。
了解模糊控制系统的基本概念与原理;完成基于某大迟滞环节的模糊控制器的设计;五、研究方法与手段在充分了解模糊控制基本原理的基础上,针对一典型带有大迟滞环节被控对象数学模型,利用MATLAB的Simulink以及Fuzzy Control工具箱对比完成采用传统PID调节器、单纯采用模糊控制以及将模糊控制与Smith预估补偿原理相结合的方法之间控制效果的优劣。
六、进度安排1、2014.12.10—2015.03.05 查找资料,通过书籍和网络了解模糊控制基本原理及研究方法,完成开题报告。
2、2015.03.06—2015.03.29 熟练掌握MATLAB Simulink工具箱。
了解智能控制的基本概念,模糊数学的基本内容以及模糊控制器设计的基本方法。
3、2015.03.30—2015.04.20 完成基于模糊Smith预估控制器的仿真。
4、2015.04.21—2015.05.25 对仿真结果进行分析,并得出结论。
5、2015.05.26—2015.06.10 撰写论文,准备答辩。
七、主要参考文献[1]王志萍.带有Smith预估器的模糊控制系统仿真研究[J].上海电力学院学报. 2004(02).[2]储岳中,陶永华. 基于MATLAB的自适应模糊PID控制系统计算机仿真[J]. 安徽工业大学学报(自然科学版). 2004(01) .[3]尹明,董振银,宋利君.模糊PID在电炉温度控制中的应用[J]. 齐齐哈尔大学学报. 2003(02) .[4]张涛,李家启.基于参数自整定模糊PID控制器的设计与仿真[J].交通计算机. 2001(S1).[5]周荔丹,童调生.模糊PID在电阻加热炉温控系统中的应用[J].自动化仪器仪表. 2001(05) .[6]饶翡鹏,王东云,凌德麟.模糊控制的发展和现状[J]. 郑州纺织工学院学报. 2000(03).[7]何明. 工业自动化控制系统通讯网络的应用研究[D]. 合肥工业大学.2009.[8]卢娟. BP神经网络PID在三容系统中的控制研究[D]. 合肥工业大学.2009.[9] 方鹏. 基于模糊PID算法的中央空调温度控制系统设计[D]. 合肥工业大学.2009[10]李岩. 模糊PID控制在液位控制中的应用[D]. 合肥工业大学,2008 .[11]简珣. 模糊PID控制在三容水箱系统控制中的应用研究[D]. 合肥工业大学2007.选题是否合适:是□否□课题能否实现:能□不能□指导教师(签字)年月日选题是否合适:是□否□课题能否实现:能□不能□审题小组组长(签字)年月日摘要在工业过程控制领域中,许多被控对象都不同程度存在着时滞现象。
随着科学技术的迅猛发展,各个领域对自动控制系统精度、响应速度、系统稳定性、自适应能力的要求越来越高,所研究的系统也日益复杂多变。
然而,在许多情况下精确数学模型很难建立。
即使对一些复杂对象建立数学模型,模型也往往过于复杂,既不利于设计也难以实现有效控制。
虽然常规自适应控制技术可以解决一些问题,但其能力也是有限的。
具有时间滞后特性的控制对象是非常普遍的,由于时滞的存在严重影响了系统的控制效果和稳定性,导致系统的超调变大,调节时间变长,甚至出现振荡和发散。
提高了系统的响应速度和系统的稳定性,因此提出简单,有效,实用的大时滞控制方法是很有意义的。
本文针对具有时滞特性的控制对象,主要研究在工业过程中的得到大量应用的PID控制、Smith预估控制和模糊控制在多变量时滞系统中的应用。
对现有的模糊方法加以改进,形成更加完善的控制方法;与现有的PID控制,史密斯预测控制相融合,构成综合控制法,通过这些来解决带有纯延迟环节的控制问题。
了解模糊控制系统的基本概念与原理;完成基于某大迟滞环节的模糊控制器的设计。
关键字:模糊控制;大时滞对象;史密斯预估器;MATLAB仿真ABSTRACTIn the field of industrial process control, many of the controlled objects are different level there is a time-delay phenomenon. With the rapid development of science and technology, the fields of automatic control system precision, response speed, system stability, adaptive ability of the demand is higher and higher, the study of the system are also increasingly complex and changeful. However, in many cases it is difficult to establish accurate mathematical model. Even for some complex object to establish mathematical model, the model also are often too complex, is not conducive to design can also be difficult to achieve effective control. Although the conventional adaptive control technology can solve some problems, but its capacity is limited.The essence characteristics of controlled object is a very, very common, but because of the lag seriously affect the control effect and the stability of the system, and the system overshoot, caused to adjust time, appear even oscillation and divergence. Improves the response speed of system and the stability of the system, thus put forward the simple, effective, practical large time delay control method, it is very meaningful.In view of the controlled object with time delay characteristics, this paper mainly studies to get a lot of application in industrial process of PID control, Smith prediction control and fuzzy control in the application of multivariable systems with time-delay. The existing fuzzy methods is improved, and form a more perfect control method; With the existing PID control, the integration of Smith predictive control, constitute a comprehensive control method, through these to solve the control problem with pure delay link. Understand the basic concept and principle of fuzzy control system; Complete the design of fuzzy controller based on a large hysteresis link。