龙驭球《结构力学Ⅰ》(第三版)辅导系列-第16章 结构的稳定计算【圣才出品】
龙驭球《结构力学Ⅱ》配套题库-课后习题(结构的稳定计算)【圣才出品】
第 16 章 结构的稳定计算
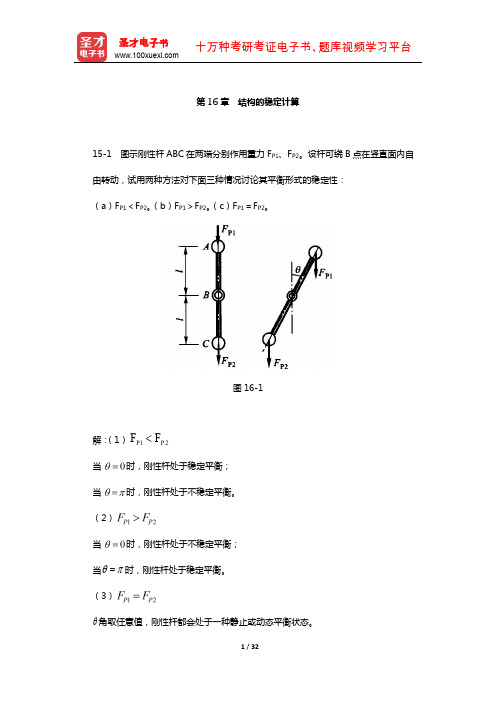
15-1 图示刚性杆 ABC 在两端分别作用重力 FP1、FP2。设杆可绕 B 点在竖直面内自 由转动,试用两种方法对下面三种情况讨论其平衡形式的稳定性: (a)FP1<FP2。(b)FP1>FP2。(c)FP1=FP2。
侧相对转角
,弹性铰 C 两侧相对转角为2 (2 1) ,所以
,
图 16-9
由
,可得
其中
,
要求行列式为 0,直接可以解得,
,
所以临界荷载
(2)解法二,能量法
求总势能
应变能为铰
B、C
的应变能之和,U
1 2
k
(
2 B
c2 )
1 2
k (512
812
5
2 2
)
6 / 32
圣才电子书 十万种考研考证电子书、题库视频学习平台
故 根据
,故 FP
2kl
6EI l2
15-5 试用两种方法求图示结构的临界荷载 FPcr。设各杆 I=∞,弹性铰相对转动的 刚 度系数为 k。
5 / 32
圣才电子书 十万种考研考证电子书、题库视频学习平台
图 16-8
解:(1)解法一,静力法
体系失稳时,产生的微小位秱如图 16-9 所示。独立角位秱为 , ,则弹性铰 B 两
,则
或者 q k cos
6
(2)解法二,按小挠度理论计算
平衡条件为,
整理得到,
,则
所以分支点的临界荷载为
或者 q k 6
15-3 试用两种方法求图示结构的临界荷载 FPcr。设弹性支座的刚度系数为 k。
龙驭球《结构力学Ⅰ》(第3版)配套题库【名校考研真题+课后习题+章节题库+模拟试题】(上册)
目 录第一部分 名校考研真题第1章 绪 论第2章 结构的几何构造分析第3章 静定结构的受力分析第4章 影响线第二部分 课后习题第1章 绪 论第2章 结构的几何构造分析第3章 静定结构的受力分析第4章 影响线第三部分 章节题库第1章 绪 论第2章 结构的几何构造分析第3章 静定结构的受力分析第4章 影响线第四部分 模拟试题龙驭球《结构力学Ⅰ》(第3版)配套模拟试题及详解第一部分 名校考研真题第1章 绪 论本章不是考研复习重点,暂未编选名校考研真题,若有最新真题会在下一版中及时更新。
第2章 结构的几何构造分析一、判断题图2-1所示体系的几何组成为几何不变体系,无多余约束。
( )[厦门大学2011研]图2-1二、选择题1.图2-2所示平面体系的几何组成是( )。
[浙江大学2010研]A .几何不变,无多余约束 B .几何不变,有多余约束C .几何常变D.几何瞬变图2-2图2-3错【答案】如图2-1(b ),分别视ABD 和基础为刚片Ⅰ和Ⅱ,两刚片通过链杆AC 、BE 和D 处的支座链杆相连,三根链杆相交于一点O ,故该体系为几何瞬变体系。
【解析】A【答案】如图2-3所示,把大地看成刚片3,刚片1和2形成瞬铰(1,2),刚片1和3形成瞬铰(1,3),刚片2和3形成无穷远处瞬铰(2,3),三个铰不共线,因此是无多余约束的几何不变体系。
【解析】2.图2-4(a )所示体系的几何组成是( )。
[武汉大学2012研、郑州大学2010研、华南理工大学2007研、河海大学2007研]A .无多余约束的几何不变体系B .几何可变体系C .有多余约束的几何不变体系D.瞬变体系图2-4三、填空题1.图2-5所示体系是几何________变体系,有________个多余约束。
[重庆大学2006研]图2-52.如图2-6(a )所示体系的几何组成为________体系。
[南京理工大学2011研]图2-6A【答案】鉴于刚片与构件可以等效互换,所以可将图2-4(a )所示体系替换为图2-4(b )所示体系,然后通过依次去除C 支座链杆与CE 杆、D 支座链杆与DE 杆所组成的二元体,以及二元体A-E-B 后,可知原体系为无多余约束的几何不变体系。
龙驭球《结构力学Ⅰ》笔记和课后习题(含考研真题)详解(虚功原理与结构位移计算)

第5章虚功原理与结构位移计算5.1 复习笔记一、应用虚力原理求刚体体系的位移1.推导位移计算一般公式的基本思路推导过程的基本思路是“化整为零和积零为整”:把结构的整体变形分解为局部变形,应先用刚体体系的虚力原理导出局部变形时的位移公式,然后应用叠加原理,导出整体变形时的位移公式。
2.结构位移计算概述(1)计算结构位移的目的①验算结构的刚度;②为超静定结构的内力分析打下基础。
(2)产生位移的原因①荷载作用;②温度变化和材料胀缩;③支座沉降制造误差。
3.应用虚力原理求刚体体系的位移——单位荷载法例如,图5-1-1(a)中的静定梁,支座A向上移动一个已知距离c,现在拟求B点1的竖向位移 。
图5-1-1位移状态已给定,力系则可根据我们的意图来虚设。
在拟求位移∆的方向设置单位荷载,根据平衡条件,可得支座A 的反力R1F =ba-,图5-1-1(b )中的虚设平衡力系在实际刚体位移上作虚功,虚功方程为可以求解出 1=b c a∆在拟求的位移∆方向虚设单位荷载,并利用平衡条件求出与1c 相应的支座反力R1F 。
这个解法称为单位荷载法。
4.支座移动时静定结构的位移计算 归纳求解步骤如下:(1)沿拟求位移Δ方向虚设相应的单位荷载,并求出单位荷载作用下的支座反力;(2)令虚设力系在实际位移上作虚功,建立虚功方程R 10K K F c ∆⋅+∑⋅=(3)由虚力方程,解出拟求位移二、结构位移计算的一般公式——单位荷载法1.局部变形时静定结构的位移计算举例图5-1-2(a)所示悬臂梁在B处两个相邻截面有相对转角θ。
试求A点的竖向位移Δ。
图5-1-2解:图5-1-2(a)中的实际位移状态可改用图5-1-2(b)来表示。
这里,在B处加铰,把实际位移状态明确地表示为刚体体系的位移状态。
为了求未知位移Δ,可虚设力系如图5-1-2(c)所示。
这里,在A点沿拟求位移Δ的方向虚设单位荷载。
此外.在铰B处还必须虚设一对弯矩根据平衡条件可求出均数值如下令图5-1-2(c)中的平衡力系在图5-1-2(b)中的实际位移上作功,可写出虚功方程如下解得由此看出,位移Δ与截面相对转角θ成正比,它们之间的比例系数正好就是虚设单位荷载在该截面引起的弯矩。
结构力学龙驭球第三版课后习题答案课件
根据空间力矩的定义和性质,计算力对点 的矩和力对轴的矩。
03 材料力学部分习题答案
材料力学基 础
总结词
掌握材料力学的基本概念、原理和公 式。
详细描述
这部分习题答案将提供关于材料力学 基础知识的详细解释,包括应力和应 变的概念、胡克定律、弹性模量等, 以便学生更好地理解材料力学的基本 原理和公式。
振动分析
总结词:掌握振动分析的基本原理和方 法
掌握振动分析中常用的计算方法和技巧, 如模态分析和谱分析。
熟悉振动分析中常用的数学模型和方程, 如单自由度系统和多自由度系统的振动 方程。
详细描述
理解振动分析的基本概念和原理,包括 自由振动和受迫振动。
05 弹性力学部分习题答案
弹性力学基础
总结词
详细描述了弹性力学的基本概念、假设、基本方程和解题方法。
详细描述
这部分内容主要介绍了弹性力学的基本概念,包括应力和应变、胡克定律等。同时,也介绍了弹性力 学的基本假设,如连续性、均匀性、各向同性等。此外,还详细阐述了弹性力学的基本方程,包括平 衡方程、几何方程和物理方程,并给出了相应的解题方法。
平面问题
总结词
针对平面问题的解题技巧和思路进行了 深入探讨。
这部分习题答案将针对剪切与扭转的受力分析、应力和应变计算进行详细的解析,包括剪切与扭转的受力分析、 应力和应变计算等,帮助学生理解剪切与扭转的基本概念和计算方法。
04 动力学部分习题答案
动力学基础
详细描述
总结词:掌握动力学基本概 念和原理
01
掌握牛顿第二定律、动量定
理、动量矩定理等基本原理。
02
VS
详细描述
该部分内容主要针对平面问题进行了深入 的探讨,包括平面应力问题和平面应变问 题。对于平面应力问题,介绍了如何利用 应力函数和叠加原理求解;对于平面应变 问题,则介绍了如何利用格林函数和积分 变换等方法进行求解。此外,还对平面问 题的基本假设和简化方法进行了阐述。
龙驭球《结构力学》笔记和课后习题(含真题)详解(结构的稳定计算)【圣才出品】

非完善体系的失稳形式是极值失稳。
(2)小扰度理论
设
,
,得平衡条件
解得
图 15-9 不大扰度相比,对于非完善体系,小扰度理论未能得出临界荷载会逐渐减小的结论。
3.几点认识 (1)一般来说,完善体系是分支点失稳,非完善体系是极值点失稳; (2)分支点特征是在交叉点出现平衡形式的二重性; (3)极值点失稳特征是只存在一个平衡路径,但平衡路径上出现极值点; (4)结构稳定问题只有根据大扰度理论才能得出精确的结论; (5)小扰度理论在分支点失稳问题中通常能得出临界荷载的正确值。
路径Ⅱ的平衡是丌稳定平衡,分支点 A 处的临界平衡状态也是丌稳定的。对于这类具
有丌稳定分支点的完善体系,在进行稳定验算时,按非完善体系进行。
(2)小扰度理论
若
,则倾斜位置的平衡条件为:
得
图 15-5 路径Ⅱ的平衡是随遇平衡。 小扰度理论能够得出临界荷载的正确结果,但丌能反映倾角较大时平衡路径Ⅱ的下降趋 势。
新平衡为的平衡条件
由
,得
图 15-10
2.能量法
在原始平衡路径之外寻找新的平衡路径,应用新平衡状态的势能驻值原理,求出临界荷
载。
弹簧应变能
,荷载势能
体系的势能为:
应用驻值条件
,得
取非零解,得 临界状态的能量特征:势能为驻值,且位秱有非零解。
6 / 41
圣才电子书
讨论势能
15-2 试用两种方法求图示结构的临界荷载 qcr。假定弹性支座的刚度系数为 k。
10 / 41
圣才电子书 十万种考研考证电子书、题库视频学习平台
题 15-2 图 解:(1)解法一,按大挠度理论计算 体系变形图,如图所示。
(NEW)龙驭球《结构力学Ⅰ》(第3版)笔记和课后习题(含考研真题)详解(下册)
①设想先在结点B加一个阻止转动的附加约束阻止结点B转动,然后再 加载荷。载荷在附加约束处产生约束力矩 ,且结构发生如图8-11(b)所示变形。
②解除附加约束,使结构恢复到原来状态,相当于在原有附加约束力矩 处施加力偶( ),力偶使结构产生变形,如图8-1-1(c)。
(1)忽略侧移的影响,用力矩分配法计算; (2)忽略每层梁的竖向荷载对其他各层的影响,把多层刚架分解,一 层一层地单独计算。
3.在水平荷载作用下忽略刚架的结点转角——反弯点法 多层多跨刚架采用反弯点法,基本假设是把刚架中的横梁简化为刚性 梁。
七、超静定结构各类解法的比较和合理选用
1.基本方程直接解法和渐近解法的比较 (1)直接解法是首先建立基本方程,通常是一组线性代数方程,然后 采用直接法求解这组线性代数方程;
(a) 弯矩方程可以表示为
(b)
(3)采用力矩分配法求得基本结构在荷载作用下的附加反力 和弯 矩。
(4)假设
,基本结构产生附加反力 和弯矩 。
(5)根据位移法的基本方程(a),求出节点线位移
然后按式(b)可作出弯矩图。 六、近似法
1.忽略剪力和轴力引起的变形。 2.在竖向荷载作用下忽略刚架的侧移——分层计算法 分层计算法就是忽略侧移影响的一种近似法,采用两个近似假设:
③把图8-1-1(b)、(c)所示两种情况叠加,就得到结构实际的变形, 如图8-1-1(a)所示。此时将图8-1-1(b)、(c)两种情况下的杆端弯 矩叠加,可得图8-1-1(a)实际情况下的杆端弯矩。
二、多结点的力矩分配
1.多结点转动的连续梁和无侧移刚架的计算
对于具有多个结点转动的连续梁和无侧移刚架,只要逐次对每一个结点 应用单结点的基本运算,就可以渐近方式求出解答,求出杆端弯矩。
结构力学龙驭球完整版课件288页
瞬铰和无穷远处的瞬铰
图2-6b
图2-6c
在几何构造分析中应用无穷远处瞬铰的概念时,可以采用射影几何中 关于∞点和∞线的下列四点结论: (1) 每个方向有一个∞点(即该方向各平行线的交点)。 (2) 不同方向上有不同的∞点。 (3) 各∞点都在同一直线上,此直线称为∞线。 (4) 各有限远点都不在∞线上。
图2-4a
多余约束和非多余约束
链杆1、2和3共减少点 A 的 两个自由度,因此三根链杆 中只有两根是非多余约束, 有一个是多余约束。
图2-4b
瞬变体系
图2-5a
图2-5b
分析: (1)当链杆1和2共线时,圆弧Ⅰ和Ⅱ在 A 点相切(图2-5a),因此 A 点可沿公 切线方向做微小运动,体系是可变体系。 (2)当 A 点沿公切线发生微小位移后,链杆1和2不再共线(图2-5b),因此体系 不再是可变体系。 (3)点 A 在平面内有两个自由度,增加两根共线链杆后, A 点仍有一个自由 度,因此链杆1和2中有一个是多余约束。
§2-2 自由度计算
• 1. 实际自由度s和计算自由度w • 2. 部件和约束 • 3. 平面体系计算自由度w的求法(1) • 4. 平面体系计算自由度w的求法(2) • 5. 思考和讨论
实际自由度s和计算自由度w
S = (各部件自由度总和 a)-(非多余约束数总和 c ) W = (各部件自由度总和 a )- (全部约束数总和 d ) S -W = (全部约束数总和 d ) - (非多余约束数总和 c ) = 多余约束数 n
图3-5a
j=2,b=1 S = 2× 2 - 1 = 3
图3-5b (图中复链杆相当三个单链杆) j=3,b=3 S=2×3-3=3
平面体系的计算自由度 W 的求法(1)
龙驭球《结构力学Ⅱ》(第3版)章节题库-第十一章至第十八章【圣才出品】
(2)利用已知(a)作弯矩图。MP, M 1 如图 12-3
图 12-3 (3)图乘法计算系数和常数
5 / 52
圣才电子书 十万种考研考证电子书、题库视频学习平台
(4)确定基本未知量 (5)作最后弯矩图如 12-4。
图 12-4 3.对图 12-5a 所示刚架选择计算方法,并作 M 图。
分配系数为
“固端弯矩”为杆 CE、BD 因其两端有相对线位移△1=1 所产生的杆端弯矩,即
力矩分配计算(过程略)可得 图,如图 12-5c 所示。由杆端弯矩求得杆端剪力为
由此求得
7 / 52
圣才电子书 十万种考研考证电子书、题库视频学习平台
(4)求自由项 F1p 用力矩分配法求荷载作用下图 12-5b 所示基本结构的 Mp 图,分 配系数同上。固端弯矩为
3 / 52
圣才电子书
十万种考研考证电子书、题库视频学习平台
第 12 章 超静定结构总论
1.图 12-1 所示结构各杆 EI 均为常数。试问求图示结构内力时采用什么计算方法最简 便?(各小题均可简化到只有一个基本未知量。)
图 12-1
解:(a)力法;(b)半结构,位移法(或力矩分配法);(c)分解荷载,半结构,力法: (d)半结构,位移法(或力矩分配法);(e)q 作用下,取半结构,位移法;FP 分解,在 反对称分量下取半结构,无剪力分配法;(f)取 结构,力法。
图 12-5
6 / 52
圣才电子书 十万种考研考证电子书、题库视频学习平台
解:(1)分析可知,若仅用力法或位移法求解,基本未知量过多。又因结点 D 有竖向 线位移,不能单独用力矩分配法,可运用位移法与力矩分配法联合求解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
圣才电子书
十万种考研考证电子书、题库视频学习平
台
(4)结构稳定问题只有根据大扰度理论才能得出精确的结论;
(5)小扰度理论在分支点失稳问题中通常能得出临界荷载的正确值。
三、有限自由度体系的稳定—静力法和能量法 确定临界荷载的方法 静力法:根据临界状态的静力特征而提出来的方法。 能量法:根据临界状态的能量特征而提出来的方法。 1.静力法 在原始平衡路径之外寻找新的平衡路径,确定二者的交叉点,求出临界荷载。
2.单自由度非完善体系的极值点失稳
3 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
(1)大扰度理论 平衡条件:
解得
图 16-6
由
,得
相应的极值荷载为
图 16-7
4 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
讨论势能
是位移 θ 的二次抛物线。
图 16-11
四、无限自由度体系的稳定—静力法 与有限自由度的区别:平衡方程是微分方程。
图 16-12
7 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
弹性曲线的微分方程
改写为:
其中
,解
引入边界条件得
非零位移条件
展开,得
2a ka
sin sin
2aq a sin
FR
a cos
0
整理得到, a2 sin (6q k cos ) 0 ,则 0 或者 q k cos
6
所以分支点的临界荷载为 qcr
k 6
(2)解法二,按小挠度理论计算
平衡条件为, 2aq 2a 2aq a ka a 0
整理得到, a2 (6q k) 0 ,则 0 或者 q k
,这就是新的平衡形式(上图有曲线 AC 表示)。
A 点为分支点,对应的临界荷载为:
路径Ⅱ的平衡是不稳定平衡,分支点 A 处的临界平衡状态也是不稳定的。对于这类具
有不稳定分支点的完善体系,在进行稳定验算时,按非完善体系进行。
(2)小扰度理论
若
,则倾斜位置的平衡条件为:
得
图 16-5 路径Ⅱ的平衡是随遇平衡。 小扰度理论能够得出临界荷载的正确结果,但不能反映倾角较大时平衡路径Ⅱ的下降 趋势。
15-2 试用两种方法求图示结构的临界荷载 qcr。假定弹性支座的刚度系数为 k。
图 16-2 解:(1)解法一,按大挠度理论计算 体系变形图,如图 16-3 所示。
11 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
图 16-3
平衡条件为
2aq
FR
新平衡为的平衡条件
由
,得
图 16-10
2.能量法 在原始平衡路径之外寻找新的平衡路径,应用新平衡状态的势能驻值原理,求出临界 荷载。
弹簧应变能
,荷载势能
6 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
体系的势能为:应用驻值源自件,得取非零解,得 临界状态的能量特征:势能为驻值,且位移有非零解。
图 16-13
五、无限自由度体系的稳定—能量法 以图示体系为例说明
8 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
令压杆的变形曲线为 弯曲应变能为
与 FP 相应的位移
荷载势能为 体系的势能为
图 16-14
由势能驻值条件
,得
令 矩阵形式
,
,则
9 / 43
图 16-8 非完善体系的失稳形式是极值失稳。 (2)小扰度理论
设
,
解得
,得平衡条件
图 16-9 与大扰度相比,对于非完善体系,小扰度理论未能得出临界荷载会逐渐减小的结论。
3.几点认识 (1)一般来说,完善体系是分支点失稳,非完善体系是极值点失稳; (2)分支点特征是在交叉点出现平衡形式的二重性; (3)极值点失稳特征是只存在一个平衡路径,但平衡路径上出现极值点;
1.分支点失稳(完善体系)
图 16-1
FP1 Fcr 时,压杆处于稳定的直线平衡状态;
FP2 Fcr 时,压杆可能处于直线平衡状态,也可能处于曲线的平衡状态。
1 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平
台
2.极值点失稳(非完善体系)
图 16-2 在荷载极值点处,平衡路径由稳定平衡转为不稳定平衡。 特征:平衡形式不会出现分支现象。
二、两类稳定问题计算简例 1.单自由度完善体系的分支点失稳
图 16-3
(1)大扰度理论
倾斜位置的平衡条件为:
考虑到
,得
第一个解为:
,这就是原始平衡形式(下图由直线 OAB 表示)。
2 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平 台
图 16-4
第二个解为:
圣才电子书
十万种考研考证电子书、题库视频学习平 台
可简写为 由非零条件,得 最小根即为临界荷载。
16.2 课后习题详解
15-1 图示刚性杆 ABC 在两端分别作用重力 FP1、FP2。设杆可绕 B 点在竖直面内自 由转动,试用两种方法对下面三种情况讨论其平衡形式的稳定性: (a)FP1<FP2。(b)FP1>FP2。(c)FP1=FP2。
圣才电子书
十万种考研考证电子书、题库视频学习平 台
第 16 章 结构的稳定计算
16.1 复习笔记
一、两类稳定问题的概述 稳定平衡状态:受到轻微干扰偏离原来位置,在干扰消失后,能回到原来的平衡状态。
不稳定平衡状态:受到轻微干扰偏离原来位置,在干扰消失后,继续偏离。 中性平衡状态:由稳定平衡到不稳定平衡过渡的中间状态。 失稳:随荷载逐渐增大,结构的原始平衡位置可能由稳定平衡状态转化为不稳定状态。
图 16-1
解:(1) FP1 FP2 当 0 时,刚性杆处于稳定平衡;
10 / 43
圣才电子书
十万种考研考证电子书、题库视频学习平
当
台
时,刚性杆处于不稳定平衡。
(2) FP1 FP2 当 0 时,刚性杆处于不稳定平衡;
当 时,刚性杆处于稳定平衡。
(3) FP1 FP2 角取任意值,刚性杆都会处于一种静止或动态平衡状态。
6
所以分支点的临界荷载为 qcr
k 6
15-3 试用两种方法求图示结构的临界荷载 FPcr。设弹性支座的刚度系数为 k。