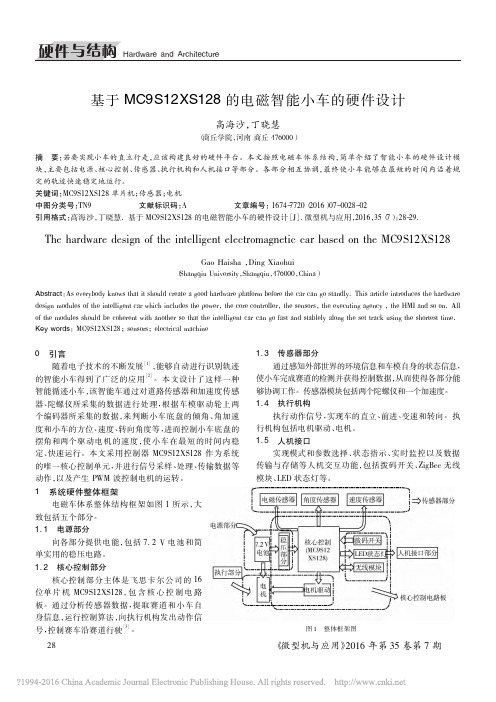
基于MC9S12XSl28的直立轮式智能小车设计
基于飞思卡尔杯智能小车的设计
·136·
科技论坛
源供电。 驱动电机模块:根据单片机发出的 PWM 波
来控制驱动电机的加速、减速,完成电磁双车在减 速、直道加速。遇到障碍物等路况可以瞬间躲让任 务,还有就是能够在规定的距离区域内刹住电磁 双车。
关键词:智能车;传感器;微处理器
当今社会发展迅速,我国汽车产业不断 发展壮大,汽车越来越往智能控制方向发展, 智能一体化不断的深入人们生活起居中。智 能控制技术的不断提高,不断的优化,使得我 们的生活更加的智能化。智能出行、智能电 器、智能交通等这些智能技术的应用大大的 促进了中国的飞速发展。
本设计以第十届“飞思卡尔”杯智能车竞 赛为背景。以 MC9S12XS128MAA 芯片作为整 个系统的研究中心。搭配其他的传感器实现 小车的智能循迹、智能导航。
转向控制模块:控制小车在最优的路径内行 驶,躲避障碍物。按照既定算法路线左右摆动。转 弯、回正。
速度测量模块:运用安装在后轴上的两个高 精密的旋转编码器获取的速度信息,采集到信息 直接传送到 S12 主控模块。
发车线识别模块:该模块主要识别赛道的电 磁信号的强弱,来判断是往哪个方向发车,主要用 到的是干簧管识别。
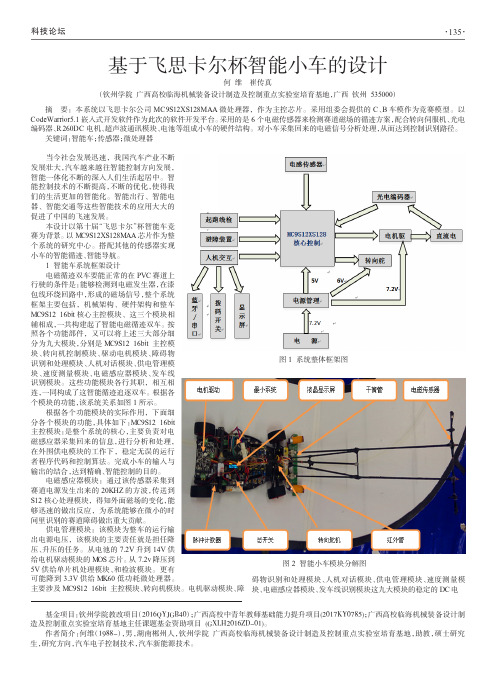
1 智能车系统框架设计 电磁循迹双车要能正常的在 PVC 赛道上 行驶的条件是:能够检测到电磁发生器,在漆 包线环绕回路中,形成的磁场信号,整个系统 框架主要包括,机械架构、硬件架构和整车 MC9S12 16bit 核心主控模块、这三个模块相 辅相成,一共构建起了智能电磁循迹双车。按 照各个功能部件,又可以将上述三大部分细 分为九大模块,分别是 MC9S12 16bit 主控模 块、转向机控制模块、驱动电机模块、障碍物 识别和处理模块、人机对话模块、供电管理模 块、速度测量模块、电磁感应器模块、发车线 识别模块。这些功能模块各行其职,相互相 连,一同构成了这智能循迹追逐双车。根据各 个模块的功能,该系统关系如图 1 所示。 根据各个功能模块的实际作用,下面细 分各个模块的功能,具体如下:MC9S12 16bit 主控模块:是整个系统的核心,主要负责对电 磁感应器采集回来的信息,进行分析和处理, 在外围供电模块的工作下,稳定无误的运行 者程序代码和控制算法。完成小车的输入与 输出的结合,达到精确、智能控制的目的。 电磁感应器模块:通过该传感器采集到 赛道电源发生出来的 20KHZ 的方波,传送到 S12 核心处理模块,得知外面磁场的变化,能 够迅速的做出反应,为系统能够在微小的时 间里识别的赛道障碍做出重大贡献。 供电管理模块:该模块为整车的运行输 出电源电压,该模块的主要责任就是担任降 压、升压的任务。从电池的 7.2V 升到 14V 供 给电机驱动模块的 MOS 芯片。从 7.2v 降压到 5V 供给单片机处理模块、和检波模块。更有 可能降到 3.3V 供给 MK60 低功耗微处理器。 主要涉及 MC9S12 16bit 主控模块、转向机模块。电机驱动模块、障
基于MC9S12XS128的电磁智能小车的硬件设计_高海沙
《微型机与应用》2016年第35卷第7期基于MC9S12XS128的电磁智能小车的硬件设计高海沙,丁晓慧(商丘学院,河南商丘476000)摘要:若要实现小车的直立行走,应该构建良好的硬件平台。
本文按照电磁车体系结构,简单介绍了智能小车的硬件设计模块,主要包括电源、核心控制、传感器、执行机构和人机接口等部分。
各部分相互协调,最终使小车能够在最短的时间内沿着规定的轨迹快速稳定地运行。
关键词:MC9S12XS128单片机;传感器;电机中图分类号:TN9文献标识码:A文章编号:1674-7720(2016)07-0028-02引用格式:高海沙,丁晓慧.基于MC9S12XS128的电磁智能小车的硬件设计[J ].微型机与应用,2016,35(7):28-29.The hardware design of the intelligent electromagnetic car based on the MC9S12XS128Gao Haisha ,Ding Xiaohui(Shangqiu University ,Shangqiu ,476000,China )Abstract :As everybody knows that it should create a good hardware platform before the car can go standly.This article introduces the hardware design modules of the intelligent car which includes the power ,the core controller ,the sensors ,the executing agency ,the HMI and so on.All of the modules should be coherent with another so that the intelligent car can go fast and stablely along the set track using the shortest time.Key words :MC9S12XS128;sensors ;electrical machine引言图1整体框架图随着电子技术的不断发展[1],能够自动进行识别轨迹的智能小车得到了广泛的应用[2]。
基于MC9S12×S128处理器的智能循迹小车分析研究

题 比较 实用 的办 法就 是加 上适 ■ 1.3 电磁传感器 电路
当大小 的 电容 ,如加 上储 能器
近 年来 ,电磁组 的传 感器 已经 由三极 管组成 的放大 电路
件 ,放大器的供 电需减少纹波 ,供给放大器 的电压 纹波越 大 全 面升级至集成运放放大 电路感器 [41。集成运放 的优 点是 温
软 件 算 法 设 计 。
1.硬件 电路设计
以 MC9Sl2XSl28处理器为 基础 智能小车硬件 电路 包含
了 电源供 电 电路、 电机驱 动 电路 、电磁传 感器 电路、MCU
最小系统 电路。智 能小 车通过对 电磁传感 器采集 的路况信息
进行分析 ,实现对车 的闭环控制。
图 2 LM2940稳 压 电路
一 1.1电源供电 电路
■ 1.2驱动 电路
对于智 能小车 的电源部分 ,
驱 动 电路的选 择 :通过 分析研 究,集成 芯片 BTS7690
由于面 临复 杂 的行 车环 境 ,要 具有过 热、过压 、欠压、过 流、短路保护等功 能,设 计中的 求 稳定 第 一,抗 干扰 性 能强。 电机驱 动使用集 成芯片 BTS7960。 本次设 计采用 2片全桥
引言
(3)舵机模块与传感器模块 :采用舵机与传感器采用输
在 电子技 术发 展迅 猛的今天,汽 车智能化已成为各 大汽 出 电压 5V的 LM2940模块为智能小 车供电 ,使输 出 合了自动控制 、传 感器 、计 定 ,确保行 车稳定性 。
算机、通信等 多项 技术,能有效 地识别汽车当前车况,并根
资等)中,智能汽车还能减少 人力使用 ,保证工作人员的安全。 的输 出电压 即开始 出现 不稳定 现象 ,根据数 据手 册所示 ,
基于MC9S12XS128实现车模的直立控制

基于MC9S12XS128实现车模的直立控制
以飞思卡尔16位单片机MC9S12XS128为核心控制器,以二轮玩具车为控制对象,使用ENC-03RC陀螺仪传感器与MMA7361加速度传感器,通过使用匹配滤波算法实现二轮玩具车模倾斜角度的测量。
在此基础上,将二轮玩具车直立运动线性分解,设计出直立速度控制器。
实现了二轮车直立运行。
进入21世纪以来,随着我国城乡经济的高速发展,人们生活水平的提高,越来越多的人开始拥有私家车,这在一定程度上造成了日益严重的交通压力。
为了解决这一问题,人们开始研究新的交通工具。
与三轮车,四轮车等交通工具相比,两轮车具有的便于在狭窄空间运行,轻便灵活的车身以及易于存放管理的特点,成为近年来的一个研究热点,具有广泛的运用前景。
鉴于此,本文以玩具车模(以下简称车模)为研究对象,以现代电路电子先进的SMT技术为依托,使用先进的控制理论,对两轮车进行了深入研究。
MC9S12XS128是飞思卡尔半导体公司推出的性价比较高的16位单片机。
日本村田公司生产的测量角速度的传感器ENC-03RC价格低廉,配合三轴角度测量传感器MMA7361可以实现角度的测量。
本文以MC9S12XS128为核
心控制器,以ENC-03RC和MMA7361为主要传感器,采用先进PID算法,设计了直立速度控制器,实现了车模的直立运行。
基于MC9S12的智能车系统设计

基于MC9S12的智能车系统设计
康孝胜;王冰
【期刊名称】《信息技术》
【年(卷),期】2010(000)002
【摘要】基于MC9S12XS128芯片构建了太阳能智能车系统,可以实现循迹、避障、速度检测与控制、太阳能充电等功能.叙述了各个模块的硬件设计,并对智能车避障的常用方法进行了比较,通过简化模糊控制的应用方案,提高了避障的实时性.【总页数】6页(P18-22,27)
【作者】康孝胜;王冰
【作者单位】河海大学电气工程学院,南京,210096;河海大学电气工程学院,南京,210096
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.基于MC9S12单片机的智能车数据远程传输系统 [J], 孟腾;章政
2.基于MC9S12的智能车“电子导游”系统 [J], 郑闯
3.基于MC9S12单片机的汽车发动机智能冷却泵控制系统设计 [J], 文凯;张颖;朱昊;王华生;杨佩琦;刘艺
4.基于MC9S12单片机智能窗帘系统设计 [J], 吕龙龙
5.基于视觉路径识别的智能车控制系统设计 [J], 焦冰;李琳;邱会然
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MC9S12XS128单片机的智能小车设计与实现
D2 LED0
Q2 9013 GND
GND
图 2 红外对管硬件电路图
图 4 无线通信模块
2
等: 基于 MC 9 S 1 2 X S 1 2 8 单片机的智能小车设计与实现 纪 秀,
1 1 3 前进的信息尽量节省时间 。 当红外检测两车距离小 于1 后车减速避免撞车 。 并且进入超车区 , 5c m 时, 通过乙车循迹完成超车并进入普通行车道后向甲车 这时乙车减速运行 , 甲车加速运 发出完成超车指令 , 行, 直 至 两 车 接 近 安 全 距 离 边 缘, 完成整个超车 过程 。 ( ) 角色互换 3 当检 测 到 起 始 线 时 标 记 清 零 , 并通过无线通讯 进 行 两 车 通 信, 甲 乙 两 车 实 现 角 色 互 换, 重新执 ) 。 行( 1
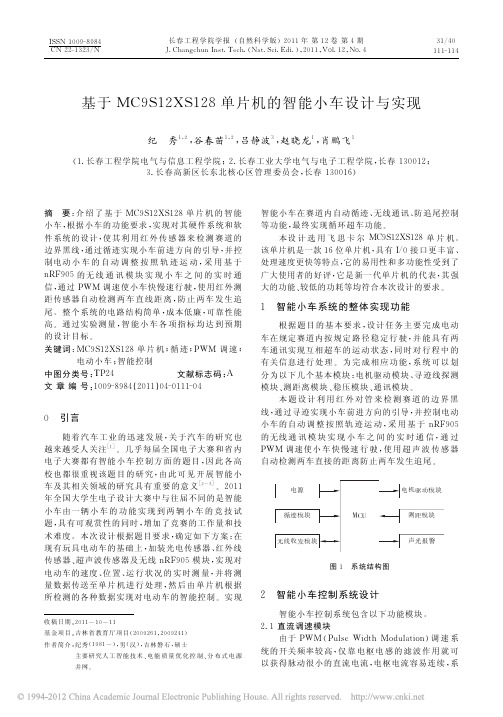
电源
电机驱动模块
循迹模块
MCU
测距模块
无线收发模块
声光报警
图 1 系统结构图
2 智能小车控制系统设计
智能小车控制系统包含以下功能模块 。 2. 1 直流调速模块 由于 PWM ( 调速系 P u l s e W i d t h M o d u l a t i o n) 仅靠电枢电感的滤波作用就可 统的开关频率较高 , 以获得脉动很小的直流电流 , 电枢电流容易连续 , 系
2. 3 红外测距模块 在设 计 中 , 为了防止两车相撞而安装了2个红 外测距装置 。 当后车将要撞到前车时后车将减速行 驶, 而当后车检测不到前车时将全速追赶 , 从而很好 地控制了两车之间的距离 。 2. 4 电源模块 电源模 块 采 用 3 9 4 0与 L D 1 1 1 7稳压模块对电 源进行稳压 , 可以很好地为单片机及直流电机供电 。 其优点是输出电压 稳 定 , 电机在调速过程中不会对 单片机系统产生影响 。 其电源稳压模块硬件电路如 图 3 所示 。
基于MC9S12XS128单片机的智能小车设计系统

基于MC9S12XS128单片机的智能小车设计系统作者:张丹师宁来源:《电子技术与软件工程》2016年第20期摘要本文介绍了以Mc9s12xs128和SYN7318语音识别模块为主要硬件,采用单电路全桥驱动和蓝牙主从一体机结构的智能小车系统。
本系统通过摄像头来检测路面信息,并利用Mc9s12xs128控制算法调节驱动电机的转速和转向以及舵机的角度,实现了智能小车的多功能化,并可以实现语音识别、手机遥控、自动循迹等功能。
通过实际测试该智能小车各项指标均达到预期的设计目标。
【关键词】Mc9s12xs128单片机 SYN7318语音识别模块蓝牙主从一体机无线遥控小车是上个世纪在军事方面提出的一种自动化设备,它在军事侦察、防核化及污染、泥石流地震现场监测等危险与恶劣环境作业中有广阔的应用前景。
本文采用单片机控制来实现对小车的无线遥控、语音识别,自动寻迹、寻光及避障等功能。
我们主要对智能小车的各个模块进行了深入的分析及设计,从系统总体介绍、系统硬件设计、系统软件设计等方面进行研究学习,本车以摄像头为传感器的智能设计方法,通过摄像头检测路面情况,将测量数据传送至Mc9s12xs128单片机进行处理,然后通过Mc9s12xs128单片机对小车实施智能控制,最终实现了小车的自动循迹、语音识别、手机蓝牙遥控等功能。
1 系统总体介绍智能小车系统利用摄像头为传感器,利用Mc9s12xs128单片机对小车实施智能控制,单片机与SYN7318之间建立起UART通信方式,即可发送合成命令来实现文本的合成,单片机不需要理睬SYN7318的回传数据或状态引脚的输出。
但当模块处于语音识别和语音合成以外的其他状态时均需要按照标准流程发送命令。
手机遥控功能主要是利用手机蓝牙与小车蓝牙连接,通过手机发出指令到小车处理器,单片机通过对指令的处理,控制左右电机转向,以发出的命令不同实现小车前进、后退以及转向问题。
2 系统硬件设计Mc9s12xs128单片机是制作智能车的核心,配有无线遥控模块、语音合成模块电机驱动模块构以及循迹模块构成了控制系统的硬件,信息处理与控制算法由运行在单片机中的控制软件完成。
基于MC9S12XS128的直立轮式智能小车设计

基于MC9S12XS128的直立轮式智能小车设计郭玉龙;于永会;何志琴【摘要】智能车作为人们未来的出行工具,对其研究具有科学性和前沿性意义.本文介绍了一种双轮式直立小车系统,系统以MC9S12XS128作为控制核心,利用光电和倾角传感器进行数据采集,控制系统对数据进行分析处理并结合PID控制算法的整定试验,获得了一款能进行直立控制、智能循迹等功能的小车.试验表明,小车功能齐全,运行可靠,可用于各类机器人比赛和高校相关专业教学实验.【期刊名称】《现代机械》【年(卷),期】2013(000)005【总页数】4页(P31-34)【关键词】MC9S12XS128;直立控制;智能循迹;PID控制算法【作者】郭玉龙;于永会;何志琴【作者单位】贵州大学电气工程学院,贵州贵阳550025;贵州大学电气工程学院,贵州贵阳550025;贵州大学电气工程学院,贵州贵阳550025【正文语种】中文【中图分类】TP240 引言在以科技为核心竞争力的当代,智能化发展将成为各个领域的必然趋势。
智能车作为智能机器人的一个重要分支,在各种大型创新比赛中都得到了极大重视。
本文给出了一种新型轮式智能车的设计,综合了较为全面的功能并以模块化的方式实现,二次开发者在本例基础上可以方便的进行扩展。
1 概述本系统是一种轮式驱动的智能车系统,它是一个集环境感知、决策规划、智能控制和多级辅助的综合系统。
其中涉及传感器技术、微电子技术、计算机及智能控制等方面的理论研究和实践仿真。
本文中给出的两轮式直立小车制作方案,其实验装置物理意义鲜明,其研究对智能控制具有很高的价值和意义。
2 直立控制思想两轮式直立车模的控制与普通车模相比,在车模的设计和安装上要求较高,实际操作难度大。
直立控制需要实现车模平衡、转向及速度大小的控制,故本系统将整体的算法模块化,分为平衡控制、速度控制和方向控制三个方向来进行控制。
2.1 直立平衡控制由图1受力分析知:要使图中的车模重心(黑色小球)归到垂直位置,必须使重心在水平方向的受到的合力F向左。