基于航迹预测的飞行冲突探测
基于实时飞行数据的航迹冲突滚动预警
基于实时飞行数据的航迹冲突滚动预警王凯伦;王强;施红;许杰;胡明朗【摘要】In consideration of the strong real time properties of ADS-B broadcasting messages in civil aviation,a rotative warning technique based on these messages for flight track conflict is proposed in this paper. It is a simulation prediction technique that combines Monte Carlo simulation and current statistics model. Random multiple simulations that use Monte Carlo sampling produce a predicted flight track family;the quantity of these random flight track segments in a spatial zone represents the probability that the aircrafts may fly through this zone in the future. This technique may be applied to intention confirmation,conflict warning, stalled spiraling warning, and hard landing,etc. This technique is then exemplified by aircraft flight track conflict probability computation and the simulation results confirm the validity of this technique.%针对民航ADS-B 广播消息的强实时性特性,提出基于ADS-B广播消息的航迹冲突滚动预警方法;该方法是一种蒙特卡罗仿真方法和当前统计模型相结合的仿真预测方法,利用蒙特卡罗采样的随机性多次仿真,得到一个预测航迹族,空间区域内这些随机航迹段的数量反映未来飞机飞经该区域的概率。
空中交通管理系统中的冲突预测与安全性分析
空中交通管理系统中的冲突预测与安全性分析空中交通管理系统是保障航空安全、提高空域利用效率的重要手段,其核心任务之一是冲突预测与安全性分析。
冲突预测是指提前发现飞机之间可能发生的冲突情况,以便及时采取措施避免事故的发生。
安全性分析则是对系统的安全性进行评估和分析,识别潜在的风险并采取相应的措施加以应对,以保障空中交通系统的稳定和安全运行。
首先,冲突预测是空中交通管理系统中的关键任务之一。
在空中交通系统中,飞机的飞行路径是由地面空中交通管理部门根据流量、航路和策略进行规划和控制的。
然而,由于众多因素的影响,如天气、飞机间的距离等,飞机之间可能会出现冲突情况。
因此,在空中交通管理系统中,冲突预测的任务是通过利用飞机的位置、速度和航迹等信息,预测出潜在的冲突并进行警示,以便采取相应的措施避免飞机之间的碰撞。
冲突预测主要依赖于空中交通管理系统中的航空雷达、自动相关监视等系统的数据。
这些系统能够实时监测飞机的位置和速度等信息,并将这些数据传输到地面的空中交通管理中心。
通过分析这些数据,空中交通管理人员可以预测出可能出现的冲突情况,并及时发出警报或调整飞机的航路,从而避免飞机之间的碰撞。
其次,安全性分析是保障空中交通系统安全运行的重要环节。
安全性分析的目标是评估系统的安全性能,并识别潜在的风险因素,以便采取相应的措施进行控制和管理。
在空中交通管理系统中,安全性分析主要包括风险评估、事故调查和安全管理等方面的工作。
风险评估是对系统中可能发生的风险进行分析和评估。
通过对系统的各个环节进行综合分析,识别出潜在的风险因素,并对其进行评估和优化。
这样可以帮助空中交通管理部门了解系统中存在的风险,并制定相应的控制措施和规范,以降低事故的发生概率。
事故调查是对已经发生的事故进行分析和研究,寻找事故的原因和责任,并提出相应的改进措施。
通过彻底调查事故的原因,可以从根本上改善空中交通系统的安全性能,提高系统的安全性。
安全管理则是对空中交通系统中各种风险因素进行管理和控制,制定相应的安全规范和措施,完善安全管理制度,确保飞机和旅客的安全。
一种航空器跟踪预测飞行冲突检测算法
(1)
雷 (1976-) ,男, 工 程 师, 硕 士,主 要 从 事 航 空 器 通 信 与 导 航 设 备 研 究 .
第6期
张 雷, 等: 一种航空器跟踪预测飞行冲突检测算法
433
é1 0 0 0 0 0ù 式中, 量 测 矩 阵 H = ê0 0 1 0 0 0ú ; 量测误差矩阵 ê ú ë0 0 0 0 1 0û v ADSB k = [w x w y w z]T, 量测误差噪声的方差 R ADSB k =
收稿 日 期 : 2017-07-04 作者 简 介 : 张
2
跟踪预测飞行冲突检测算法
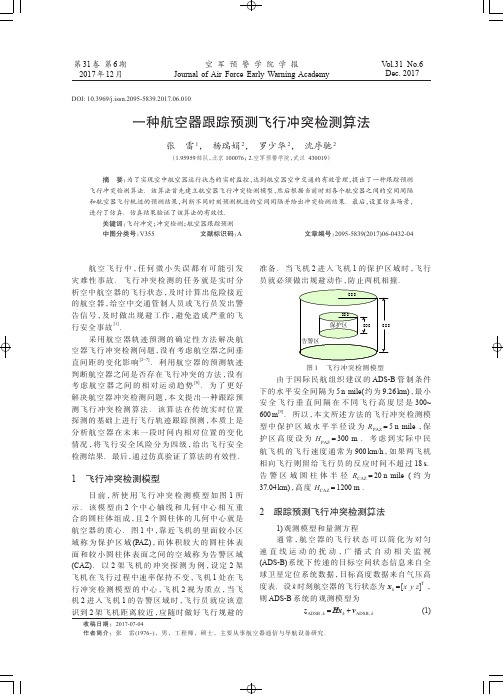
1) 观测 模 型 和 量 测 方程 通常, 航空器的飞行状态可以简化为对匀
速直线运动的扰动, 广播式自动相关监视 (ADS-B) 系 统 下 传 递 的 目 标 空 间 状 态 信 息 来 自 全 球卫星定位系统数据, 目 标 高 度 数 据 来 自气压高 度表.设 k 时刻航空器的飞行状态为 x k = [ x y z]T , 则 ADS-B 系统 的 观 测 模 型 为
航空飞行中, 任何微小失误都有可能引发 灾难性事故.飞行冲突检测的任务就是实时分 析空 中 航 空 器 的 飞 行 状 态 , 及 时 计 算 出 危险接近 的航 空 器 , 给 空 中 交 通 管 制 人 员 或 飞 行 员发出警 告信号, 及时做出规避工作, 避免造成严重的飞 行安 全 事 故 . 采用航空器轨迹预测的确定性方法解决航 空器 飞 行 冲 突 检 测 问 题 , 没 有 考 虑 航 空 器之间垂 直间距的变化影响
[9]
1
飞行冲突检测模型
目前, 所使用飞行冲突检测模型如图 1 所
航空空中交通管理技术中的冲突检测与分析研究

航空空中交通管理技术中的冲突检测与分析研究航空空中交通管理是航空运输系统中至关重要的组成部分,负责确保飞机的安全和运行效率。
而在现代航空中,空中交通密度越来越高,不同航班之间的冲突风险也随之增加。
因此,冲突检测与分析技术成为提高航空安全和运行效率的重要手段。
1. 冲突检测技术航空空中交通管理系统通过冲突检测技术来提前发现可能发生的冲突,并采取相应的措施防止事故发生。
冲突检测技术主要涉及以下几个方面:1.1 航迹冲突检测航迹冲突是指两个或多个飞机的航迹发生重叠或距离过近的情况。
传统的航迹冲突检测一般基于地面雷达数据的处理,但随着航空器的增多和交通运输的快速发展,单靠地面雷达已无法满足对所有飞机的全面监控。
因此,现代航空空中交通管理系统采用了更先进的技术,如ADS-B(Automatic Dependent Surveillance-Broadcast)和ACAS (Airborne Collision Avoidance System)等,来实现更全面和准确的航迹冲突检测。
1.2 高度冲突检测除了航迹冲突,航空空中交通管理系统还需要对飞机的垂直位置进行监控和冲突检测。
高度冲突指的是飞机之间在垂直方向上的距离过近或重叠。
通过使用高度测量装置和飞行管理系统,航空空中交通管理系统可以实时检测和分析飞机之间的高度冲突,并及时发出警告或指导航空器采取相应的避让措施。
2. 冲突分析技术冲突分析是指对已发生的冲突事件进行深入研究和分析,以便进一步改进和完善航空空中交通管理系统。
冲突分析技术主要包括以下几个方面:2.1 数据挖掘和模式识别航空空中交通管理系统产生的数据量庞大,包含大量的飞机位置、速度、高度等信息。
通过数据挖掘和模式识别技术,可以从海量的数据中发现潜在的规律和关联,从而更好地理解冲突的原因和机制。
这些分析结果可以帮助空中交通管理人员改进管制措施,提高航空运输的安全性和效率。
2.2 人机交互技术航空空中交通管理系统涉及到大量的操作和决策,而这些操作和决策往往需要人机之间的良好交互。
中期冲突探测MTCD告警技术原理与计算模型研究
中期冲突探测MTCD告警技术原理与计算模型研究【摘要】随着民航快速发展,航班运输量不断增加,而我国空域结构复杂,有限的空域资源和不断增加的航班流量之间矛盾日益显现出来。
MTCD中期冲突探测告警比STCA短期冲突探测提前数分钟,能够更早地发现潜在冲突风险,使得管制员有更充足时间来调配飞行冲突问题。
本文介绍莱斯自动化系统中期冲突探测概念现状、技术原理、计算模型,并在实际应用中提出优化建议。
【关键词】中期冲突探测;MTCD;空管自动化1MTCD概念和现状为了避免航空器冲突,保障飞行安全,国际民航组织ICAO明确规定航空器正常飞行的安全间隔。
根据冲突探测时间可分为短期冲突探测、中期冲突探测和长期冲突探测,不同层次对应不同技术决策。
中期冲突探测MTCD是基于实时监视数据、飞行计划信息和管制意图,结合策略模型算法预测飞行轨迹进行告警。
短期冲突告警主要用于实时冲突,而MTCD用于发现潜在冲突,使得管制员更早对冲突进行干预调配。
MTCD比STCA算法更为复杂[1],除了位置和速度外还需综合考虑管制意图、航空器性能等因素。
目前国外典型中期冲突探测方法有欧洲几何型中期冲突探测方法、Prandini 等提出的随机化方法[2]、Paielli等提出的近似解析方法。
国外关于冲突探测方法研究基本以自由飞行为前提的,结合我国复杂空域,考虑到军民航飞行冲突,无法真正做到自由动态改航,建立适合我国国情的冲突探测算法至关重要。
过去我国三大区管空管自动系统采用FPCP飞行计划中期冲突探测告警,没有充分考虑实时飞行监视信息、管制意图等因素,产生虚警很多,没有实际应用意义。
近年来,新型的基于监视数据和飞行计划的中期冲突探测告警改进功能逐步投入空管自动化实际应用中。
2中期冲突探测技术原理莱斯自动化中期冲突探测技术原理是基于实时航迹信息(位置、高度、速度、上升下降率、航向等)、飞行计划信息(航班号、航路等)及管制意图(指令高度),对当前飞机在前探时间内进行4D航迹预测,当两个航班水平间隔和垂直间隔同时满足告警门限时,计算冲突计数到达告警确认次数时触发中期冲突告警。
基于空中交通态势的飞行冲突探测技术

基于空中交通态势的飞行冲突探测技术摘要随着我国民航事业的迅猛发展,空中交通流量也得到快速增长,飞行路线冲突已经成为影响飞行安全的重要因素,为此本文以管制员对空中态势的认知为出发点,阐述了飞行冲突的探测技术。
关键词空中交通态势;飞行冲突;探测技术中图分类号TBl8 文献标识码 A 文章编号1673-9671-(2012)111-0104-01空中交通已变得日益繁忙和复杂,因此空中交通管制中管制员管制技术的研究愈发重要,如何建设和培养一支高素质合格的管制员队伍已成为民航实现飞行安全的基本保障。
因此我们提出了一种基于空中交通态势的飞行冲突探测技术,以减轻管制员的工作负荷,保障飞行安全,提高航空公司的运行效益。
1 管制员对空中交通态势的认知空中交通态势是指在一定时间、空间范围内的空中交通现状及其发展趋势。
管制员对空中交通态势的认知就是指管制员在特定的时段和特定的情景中对影响飞行活动和空管安全的各个因素,各个条件的准确知觉,以及对未来情况的正确预期。
管制员在发现问题,分析问题和解决问题这一连续过程中,能否及时的发现问题是解决问题的基础和前提,而警觉性的高低将直接影响到发现问题的早晚和快慢。
对交通态势的认知程度决定了警觉水平的程度。
如果管制员在管制过程中失去了当前所有的交通态势信息,就等于失去了作出管制决策的重要依据。
管制员进行空中交通管制活动,其实就是管制员根据自己掌握的交通态势信息,不断的对整个空中交通态势做出判断并且进行管制决策的过程,因此在空中交通管制中,管制员对整个交通态势认知水平的高低,以及对未来交通发展趋势的预测能力将直接影响到空中交通的安全。
空中交通管制员对空中交通态势的认知,是通过感官从显示器、通讯设备和对环境情况的观察,获得各有关要素后形成的。
对态势的认知可以分为三个层次:第一层次,对环境中各要素的感知,涉及有关要素的状态、情况、特征性质和动态特性等。
比如要准确的把握空中交通管制区域的每一架飞机的相关特征(如机号、空速、位置、航路、航向、高度等)、气象情况、有无请求、紧急情况和其他的相关要素。
基于低空救援航空器航迹预测与冲突解脱研究

基于低空救援航空器航迹预测与冲突解脱研究发布时间:2021-07-20T17:15:34.777Z 来源:《工程管理前沿》2021年3月第8期作者:骆晓非[导读] 航空救援是主要以小型低速航空器为运载工具骆晓非中国商飞民用飞机试飞中心摘要:航空救援是主要以小型低速航空器为运载工具,其主要优势是速度快、效率高、地理因素影响小等。
航空救援对于重大自然灾害的救援有着不可替代的作用。
我国颁布了《低空空域管理使用规定》,从政策上对低空实行了开放,促使人们越来越关注低空航空器运行安全。
本文针对通用航空器在低空救援重大灾害的飞行过程中的安全问题,从预测飞行航迹入手,探测飞行冲突。
关键词:低空救援航空器;航迹预测;冲突解脱航空救援具有速度快、效率高、地理因素影响小等突出优势,成为处理抗震救灾等突发事件最有效的救援手段。
现阶段我国航空救援的效果并不能让人满意,和其他发达国家相比,差距很大。
航空应急救援的本质是使用航空技术手段和装备处理重大自然灾害和突发公共安全事件的一种应急救援行为,在本质上和其他救援手段并无差别,但是具有独特的救援技术手段和装备以及组织体系。
航空救援是以小型低速航空器为主,我国现阶段低空空域还没有覆盖地面通信、导航和监视系统,同时空中交通管制部门也不能提供雷达监视低空空域服务,飞行安全只能靠飞行员负责。
另外,航空器在低空环境下运行,会受到多种因素的干扰,存在着安全风险大、施救效率低和实施不合理等诸多的问题。
一、对低空救援航空器航迹预测的有效方法(一)利用混合估计算法预测低空救援航空器的飞行航迹混合估计算法是确定当前时刻航空器的飞行模式,并把其作为一个预测航迹的输入参数。
当航空器改变运动状态的时候,一个数学模型不能把发生的变化很好的描述出来,这个时候需要使用多模型算法,最常使用的多模型算法是综合式伪贝叶斯算法和交互式多模型算法。
交互式多模型算法是针对航空器的所有的运动状态都建立一种对应的模型,能够在任意时刻把航空器的运动状态用特定的模型表示出来,而航空器的运动变化也就是数字模型之间的转换可以利用齐次马尔可夫链完成[1]。
民航飞行计划冲突检测技术研究

科技创新TECHNICAL INNOVATION43作者简介:郭培胜(1983-),男,工程师,硕士,研究方向:应用软件设计。
限制飞行区域是指依据空域管理需要预先划设空间区域,包括禁飞区、限制区、交战区等。
一般情况下,空中航空器不应飞越该类区域,以避免不必要的误伤。
限制飞行区域是一个立体三维空间区域,在某个高度层上为多边形或圆。
拟制民航飞行计划时,将预先规定航班的机型、起飞时间、起飞机场、降落时间、降落机场、沿途航路等内容。
对民航飞行计划进行冲突检测后,将形成冲突检测结论。
对于存在冲突的飞行计划,将进行冲突告警提示。
经人工核对后,管制员可进一步协调与优化航路,以消除计划冲突。
1 冲突检测处理框架当系统收到飞行计划时,将对民航飞行计划进行冲突检测,检测该飞行计划是否与区域、飞行计划存在飞行冲突。
冲突检测处理具体步骤(图1)如下:①区域冲突检测,检测飞行计划是否穿越限制飞行区域。
②当存在区域冲突时,告警提示操作员:“XXX 计划与XXXX 区域的冲突”,退出。
③飞行计划间冲突检测,检测该民航飞行计划与其他计划是否存在位置和时间冲突。
④当存在计划间冲突时,告警提示操作员:“X X X 计划在XX 航路段冲突”,退出。
⑤设置飞行计划状态,退出。
图 1 民航飞行计划冲突处理流程2 区域冲突检测区域冲突检测主要检测民航飞行计划的航路是否穿越限制飞行区域。
为了减少计算量,区域冲突检测分为两个步骤:区域冲突检测预处理和区域冲突精细化检测。
通过区域冲突检测预处理,排除大量无关的限制飞行区域,输出疑似冲突区域;区域冲突精细化检测则是对疑似冲突的限制飞行区域,进一步精细化检测,精准形成区域冲突结论[1]。
2.1 区域冲突检测预处理区域冲突检测预处理是依据飞行计划航路信息,采用解析方法计算与评估民航飞行计划是否穿越限制飞行区域情况。
当飞行航路与限制飞行区域相交,可以民航飞行计划冲突检测技术研究郭培胜中国电子科技集团第二十八研究所,江苏 南京 210007摘要:根据飞行计划管理软件研制需要,笔者展开了对民航飞行计划冲突检测的技术研究,主要研究了飞行计划穿越限制飞行区域检测方法及飞行计划间冲突检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Absr t Ba e n t e so h si n u n e o ih e il n f —c rig nsr me t e 0 n tac : s d o h t c a tc if e c ff g tv h ce a d o l l ara e i tu n nl o r t e wa h y,t e p p rp o o e h o fitdee t n mo e fc nsa tv lc t de .Th a e o u e n h a e r p s st e c n c tc i d lo o t n eo i mo 1 l o y e p p rfc s so t e st ain o wo fiht e il s l i g co e a d p o o e u i g h iu to f t g v h ce f n ls n r p s s sn Kama f tr t e r t r d c h l y l n i e h o y o p e it t e l r ltv r c b t e h t iht e ils T e eai e ta k ewe n t e wo f g v h ce . h n,a c r n o he r l t e r c i c l ua e t e l c odig t t ea i ta k, t ac lts h v d sa c ewe n h t f g t e i ls Fi ly, a c r i g o t e o di o o o fit i si ts itn e b t e t e wo i h v h ce . nal c o d n t c n t ns f c n c , t t h i l e mae wh t e hee i o fi t T t o o n y h sg a a te h i h d lco e o t e f g tv h ee ̄ e h r t r sc n c . he me d n to l a u r n e d t e f g tmo e l s rt h ih e i l l h l l r a i h o di o , as t c mp tr i l t n r s l i d c t s t t t i me o a ar n h e lf g tc n t ns lo he o u e smu a i e ut n i ae ha s i o h h t d c n c ry o te
F i h n l tDe e t n b s d o l h t e it n l tCo fc t c i a e n F i tPa h Pr d c i g i o g o
LIBi W U e — z e n. Zh n hn
( eat etfA tm tn W hnU i rt o Tcnl y W h n4 0 7 , h a D p r n o uo ai , u a nv syf e oo , u a 30 0 C i ) m o e i h g n
c n itdee to f ci ey o f c tc in ef tv l . l e
Ke r s: n tn eo iy mo e ; n itd tc in; l n fle ; l t e ta k y wo d Co sa tv l ct d l Co c e e t l f o Kama tr Rea i r c i v
D I O 编码 :0 3 6 /.s . 0 2—2 7 .0 .2 0 1 1 .9 9 ji n 10 s 2 9 2 1 0 .2 1
中图分 类号 :P 0 T26
文献标 识码 : A
文章编 号 :0 2— 2 9 2 1 ) 2— 0 3— 3 10 2 7 ( 0 1 0 0 7 0
第 2期 2 1 年 4月 01
微
处
理
机
No 2 . Ap . 2 1 r , 01
MI OPROCE S S CR S OR
基 于 航 迹 预测 的飞行 冲 突探 测
李 彬, 吴珍珍
( 汉理 工大 学 自动 化学院 , 汉 4 0 7 ) 武 武 300
摘 要 : 于 飞行器 飞行 途 中的 随机 影 响及观测 仪器 的误 差影 响 , 出 了常速模 型 的冲 突探 测 基 给 模 型。重 点讨论 2架飞行 器 靠近 飞行 的情况 , 采用 卡尔 曼 滤 波理 论 , 预测 2架 飞行 器 的相 对航 迹。
然后依据相对航迹, 计算 2架飞行器在各 时刻 的距 离。最后根据冲突条件判断冲突是否存在。该 方法不仅 从模 型上保 证 了更接 近 飞行器 的实 际飞行 情 况 , 而且计 算 机 仿真 结 果 表 明该 方 法能 有效
地进 行冲 突探 测。
关键词 : 常速 模 型 ; 突探 测 ; 尔曼滤 波 ; 冲 卡 相对航 迹