极坐标方程
极坐标常用方程

极坐标常用方程极坐标是一种二维坐标系统,与我们常见的直角坐标系有所不同。
在极坐标系统中,一个点的位置由它的极径和极角确定,而不是由它的x坐标和y坐标确定。
极坐标常用方程是一种描述极坐标系中曲线的数学表达式,本文将介绍一些常见的极坐标常用方程。
矩形方程与极坐标方程转换要将直角坐标系中的一个方程转换为极坐标系中的方程,需要使用以下公式:•x = r * cos(θ)•y = r * sin(θ)其中,(x, y)是直角坐标系中的点,(r, θ)是极坐标系中的点。
举例来说,我们有一个方程 x^2 + y^2 = 4,要将它转换为极坐标系中的方程。
首先,我们可以使用换元法将直角坐标系中的x和y表示为极坐标系中的r和θ:* x = r * cos(θ) * y = r * sin(θ)将上述方程代入原方程,得到:* r^2 * cos^2(θ) + r^2 * sin^2(θ) = 4再进行化简,可以得到:* r^2 * (cos^2(θ) + sin^2(θ)) = 4 * r^2 = 4因此,极坐标系中的方程为 r = 2。
这个方程描述了以极径为2的圆。
常见的极坐标常用方程1.极坐标方程 r = a这是一个描述以极径为常数a的圆的方程。
圆心位于原点,半径为a。
2.极坐标方程r = a * cos(θ)这是一个描述以极径可变的半径为a * cos(θ)的螺线的方程。
3.极坐标方程r = a * sin(θ)这是一个描述以极径可变的半径为a * sin(θ)的螺线的方程。
4.极坐标方程r = a / cos(θ)这是一个描述以极径可变的半径为a / cos(θ)的双曲线的方程。
5.极坐标方程r = a / sin(θ)这是一个描述以极径可变的半径为a / sin(θ)的双曲线的方程。
6.极坐标方程r = a * e^(bθ)这是一个描述以极径可变的曲线的方程,其中a和b是常数,e是自然对数的底。
这个方程可以描述出多种不同的曲线,如指数增长曲线。
极坐标参数方程公式大全
极坐标参数方程公式大全极坐标是一种描述平面上点的坐标系,它以原点为中心,以极径和极角两个参数来确定点在平面上的位置。
极坐标参数方程是用极坐标来表示的函数方程,它可以描述一条曲线在极坐标系下的形状。
下面是一些常见的极坐标参数方程公式。
1. 圆的极坐标参数方程圆是一种特殊的曲线,它的每个点到原点的距离都相等。
圆的极坐标参数方程可以表示为:r=a其中,a表示圆的半径。
2. 阿基米德螺线的极坐标参数方程阿基米德螺线是一种由数学家阿基米德创建的曲线,其极坐标参数方程可以表示为:$r=a+b\\theta$其中,a表示螺线的起始半径,b表示每转一圈半径增加的量,$\\theta$表示极角。
3. 双纽线的极坐标参数方程双纽线是一种具有两个回环的曲线,其极坐标参数方程可以表示为:$r^2=a^2\\cos(2\\theta)$其中,a表示双纽线的参数。
4. 渐开线的极坐标参数方程渐开线是一种非常具有特点的曲线,其极坐标参数方程可以表示为:$r=a\\theta$其中,a表示渐开线的参数。
5. 摆线的极坐标参数方程摆线是一种由在铅笔一端水平移动而形成的曲线,其极坐标参数方程可以表示为:$r=a(\\theta-\\sin\\theta)$其中,a表示摆线的参数。
6. 旋轮线的极坐标参数方程旋轮线是一种由相对运动的两个圆形组成的曲线,其极坐标参数方程可以表示为:$x=(r_1-r_2)\\cos\\theta+r_2\\cos(\\frac{r_1-r_2}{r_2}\\theta)$$y=(r_1-r_2)\\sin\\theta-r_2\\sin(\\frac{r_1-r_2}{r_2}\\theta)$其中,r1和r2分别表示两个圆的半径。
以上是一些常见的极坐标参数方程公式。
通过使用这些参数方程,我们可以在极坐标系下描述和绘制出各种曲线的形状。
极坐标系在数学、物理、工程等领域中有广泛的应用,对于研究曲线和解决问题非常有帮助。
数学极坐标方程与参数方程总结

数学极坐标方程与参数方程总结
数学中有两种表示平面上点的方式:极坐标和参数方程。
这两种方式都可以描述点的位置,但使用的方法不同。
1. 极坐标方程
极坐标方程是一种表示平面上点的方式,它使用极坐标系来描述点的位置。
极坐标系中,每个点用一个半径和一个角度来表示,其中半径是点到极点的距离,角度是点到极轴的角度。
极坐标方程就是用半径和角度的函数来表示点的位置。
例如,一个点的极坐标为(r,θ),那么它的极坐标方程可以表示为:
r = f(θ)
其中,f(θ)是一个关于θ的函数,描述了点在极坐标系中的位置。
极坐标方程可以用来表示各种曲线,如圆、椭圆、双曲线等。
2. 参数方程
参数方程是另一种表示平面上点的方式,它使用参数来描述点的位置。
参数方程中,每个坐标用一个参数t来表示,其中x和y是t 的函数。
参数方程可以表示各种曲线,如直线、圆、椭圆、双曲线等。
例如,一个点的坐标为(x,y),那么它的参数方程可以表示为:
x = f(t)
y = g(t)
其中,f(t)和g(t)是关于t的函数,描述了点在平面上的位置。
参数方程可以用来描述各种复杂的曲线,如螺旋线、心形线等。
总结:
极坐标方程和参数方程都是表示平面上点的方式,它们使用不同的方法来描述点的位置。
极坐标方程使用极坐标系,用半径和角度的函数来表示点的位置;参数方程使用参数,用x和y的函数来表示点的位置。
两种方式都可以用来描述各种曲线,但有时一个曲线的极坐标方程和参数方程并不相同,需要根据具体情况选择合适的表示方式。
极坐标参数方程知识点总结

极坐标参数方程知识点总结一、概述极坐标参数方程是描述曲线的一种方式,它使用极角和极径来表示点的位置。
在这种表示法中,极径表示点到原点的距离,而极角表示从 x 轴正半轴开始逆时针旋转到该点所需的角度。
二、基本形式极坐标参数方程通常采用下面的形式:r = f(θ)其中 r 和θ 分别是曲线上某一点的极径和极角,f(θ) 是一个关于θ 的函数。
三、常见曲线1. 圆形:r = a圆形是最简单的曲线之一,它由所有到原点距离相等的点组成。
在极坐标系中,圆形可以表示为 r = a,其中 a 是圆的半径。
2. 点阵图案:r = a + b sin(nθ)这种曲线由多个同心圆组成,并且每个圆上都有 n 个等距离的“尖刺”。
这种图案通常被称为“螺旋状”。
3. 椭圆:r = a b / sqrt(b^2 cos^2(θ) + a^2 sin^2(θ))椭圆是一个具有两个焦点的曲线。
在极坐标系中,它可以用上面的方程来表示。
4. 双曲线:r = a sec(θ)双曲线是另一种具有两个焦点的曲线。
在极坐标系中,它可以用上面的方程来表示。
5. 渐开线:r = a / cos(θ)渐开线是一种无限延伸的曲线,它与圆形非常相似。
在极坐标系中,它可以用上面的方程来表示。
四、性质1. 对称性极坐标参数方程通常具有某些对称性。
例如,如果 f(-θ) = f(θ),则曲线关于 y 轴对称;如果f(π-θ) = f(θ),则曲线关于 x 轴对称;如果f(π/2-θ) = f(π/2+θ),则曲线关于直线 y=x 对称。
2. 切线和法线与直角坐标系中类似,极坐标参数方程也可以用来计算切线和法线。
切线的斜率可以通过求导 r 和θ 来得到:dy/dx = (dy/dθ)/(dx/dθ) = (dr/dθ sin θ + r cos θ)/(-dr/dθ cos θ + r sin θ)法线的斜率是切线斜率的负倒数:dy/dx = -1/(dy/dx)3. 弧长和面积极坐标参数方程也可以用来计算曲线的弧长和面积。
参数方程与极坐标方程
参数方程与极坐标方程参数方程和极坐标方程是数学中常用的两种表示函数关系的方式。
它们在解决一些复杂问题时具有独特的优势。
本文将对参数方程和极坐标方程进行详细介绍,并对它们的应用进行探讨。
一、参数方程参数方程是指通过引入一个或多个参数,用参数的变化来刻画函数中的变化规律。
一般形式为:x = f(t)y = g(t)其中,x和y是关于参数t的函数,f和g是实函数。
参数方程常用于描述一些特殊曲线,如椭圆、抛物线等。
通过引入参数,我们可以更加灵活地描绘出曲线的形状和特性。
以椭圆为例,其参数方程为:x = a * cos(t)y = b * sin(t)其中,a和b是椭圆的长半轴和短半轴。
通过调节参数t的取值范围和步长,我们可以绘制出椭圆的各个部分,从而更好地理解椭圆的形状。
参数方程还常用于描述曲线的运动轨迹。
例如,在物理学中,我们可以通过给出一个粒子在直角坐标系下每个分量的函数关系,来描述粒子的轨迹。
这种表示方式使得我们能够更加清晰地理解曲线的形态变化。
二、极坐标方程极坐标方程是指用极径和极角来表示平面上点的坐标。
一般形式为:r = f(θ)其中,r是点到原点的距离(极径),θ是该点相对于极轴的角度(极角),f是实函数。
极坐标方程常用于描述曲线在极坐标系下的特性。
例如,圆的极坐标方程为:r = a其中,a是圆的半径。
通过改变极角θ的取值范围和步长,我们可以绘制出圆的不同部分,更好地了解圆的特性。
极坐标方程还常用于描述对称图形,如螺旋线、心形线等。
通过调整参数f(θ)的形式,我们可以绘制出各种精美的曲线图案,从而丰富了数学的表现形式。
三、参数方程与极坐标方程的应用参数方程和极坐标方程在解决一些几何问题和物理问题时具有独特的优势。
在几何问题中,参数方程和极坐标方程常用于描述曲线的特性、求解曲线的方程以及计算曲线的长度、面积等几何量。
在物理问题中,参数方程和极坐标方程常用于描述物体的运动轨迹、场的分布以及力的变化规律等。
极坐标方程公式大全
极坐标方程公式大全极坐标是一种由半径和角度两个参数来描述点的坐标系统。
极坐标系常用于描述圆形、螺线等曲线,对于研究具有旋转对称性的问题非常有用。
在数学和物理学中,极坐标方程提供了描述极坐标系中各种曲线和图形的公式。
本文将介绍一些常见的极坐标方程公式。
圆的极坐标方程圆可以用极坐标方程表示为:r=a其中,a是圆的半径。
该公式表示了以原点为中心的圆,半径为a。
简单螺线的极坐标方程螺线是在极坐标系中以常数速率展开的曲线。
最常见的螺线是阿基米德螺线,其极坐标方程可以表示为:$r = a + b \\theta$其中,a和b是常数,$\\theta$ 是极角。
该公式描述了螺线的形状,a表示了螺线的起始半径,b表示了螺线的展开速率。
雪花曲线的极坐标方程雪花曲线是一种具有对称性的曲线,它由多个相互重叠的圆组成。
它的极坐标方程可以表示为:$r = a \\cdot \\sin(n \\theta)$其中,a和n是常数,$\\theta$ 是极角。
该公式描述了雪花曲线的形状,a控制着雪花曲线的大小,n控制着雪花曲线的复杂程度。
心形线的极坐标方程心形线是以两个相互重叠的圆为基础构成的曲线。
它的极坐标方程可以表示为:$r = a(1 - \\sin \\theta)$其中,a是常数,$\\theta$ 是极角。
该公式描述了心形线的形状,a控制着心形线的大小。
摆线的极坐标方程摆线是由一个悬挂的线上的一点在重力作用下运动形成的曲线。
摆线的极坐标方程可以表示为:$r = a - b \\cdot \\cos \\theta$其中,a和b是常数,$\\theta$ 是极角。
该公式描述了摆线的形状,a控制摆线的振幅,b控制摆线的周期。
总结极坐标方程提供了描述极坐标系中各种曲线和图形的公式。
本文介绍了圆、螺线、雪花曲线、心形线和摆线的极坐标方程。
每个公式都可以通过调整常数参数来控制图形的形状和大小。
极坐标方程的使用可以简化对特定曲线和图形的描述和分析,为研究具有旋转对称性的问题提供了便利。
极坐标直线方程

极坐标直线方程
直线的极坐标方程是:对于不经过极点的直线y=kx+b,代入x=ρcosθ,y=ρsinθ,化简即可。
极坐标系(polar coordinates)是指在平面内由极点、极轴和极径组成的坐标系。
在平面上取定一点O,称为极点。
从O出发引一条射线Ox,称为极轴。
再取定一个单位长度,通常规定角度取逆时针方向为正。
这样,平面上任一点P 的位置就可以用线段OP的长度ρ以及从Ox到OP的角度θ来确定,有序数对(ρ,θ)就称为P点的极坐标,记为P(ρ,θ);ρ称为P点的极径,θ称为P点的极角。
在数学中,极坐标系是一个二维坐标系统。
该坐标系统中任意位置可由一个夹角和一段相对原点—极点的距离来表示。
极坐标系的应用领域十分广泛,包括数学、物理、工程、航海、航空以及机器人领域。
在两点间的关系用夹角和距离很容易表示时,极坐标系便显得尤为有用;而在平面直角坐标系中,这样的关系就只能使用三角函数来表示。
对于很多类型的曲线,极坐标方程是最简单的表达形式,甚至对于某些曲线来说,只有极坐标方程能够表示。
θ=常数在极坐标中表示以极点为始点,与极轴的正向的夹角为θ的射线,所以在极坐标系中直线的方程是θ=k与θ=π-k,k为直线的倾。
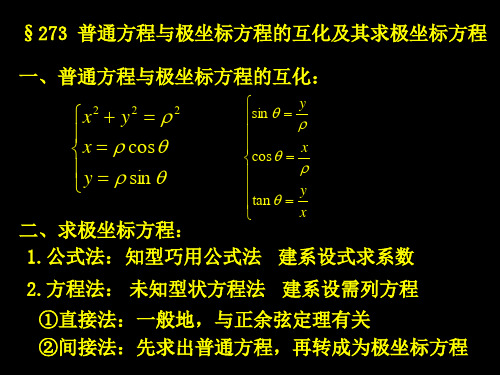
普通方程与极坐标方程的互化及其求极坐标方程
4.判(3)断判极断极坐坐标标方程程 4 sin 2 5表表示示的曲曲线线.
2
由4另由解s4in:s2i由n22题2意5得5,,4411 c2ocs2os5 5
即:2 2 cos 5 5
化直整整角理理坐得得标::由241
s2in 2
xco2 s
2y
2
5, 4
2x
1
5
cos纯属 运5 气
解:如图,易得直线 l 的普通方程为 x=a
故其极坐标方程为:
O
cos a
x
A (a,0) l
作业:
1.《固学案》P:7 2.《固学案》P:7 3.《导学案》P:8
Ex3 Ex5 案例 问题3
预习:
直线的参数方程
③ 0 和
0
cos a
cos a
sin a
sin a
特殊圆的极坐标方程
图
(r, )
2
O
x
(r,0)
(r, ) O
像
O
xO
x
x
O
x
(r, 3 )
2
方
r
程
2r cos 2r cos 2r sin 2r sin
§273 普通方程与极坐标方程的互化及其求极坐标方程
②柱坐标系是平面极坐标系的立体化
将平面极坐标系沿z轴上下平移的结果
①球坐标系又称空间极坐标系, ②球坐标系是平面极坐标系的立体化
是线段OP绕极点O旋转的结果
θ
特殊直线的极坐标方程
图
l
θ0
O
x
像
l
(a,0)
Ox
l
(a, )
Ox
l
(a, )