动刚度阻尼加速度计算
结构动力学基础

m l/ 5
m l/ 5
m l/ 5
m l/ 5
0
1
2
3
4
5
l/5
0
l/5
1y = 1 1 φ1(x) 2
l/5
3
l/5
4
l/5
5
0
2 θ1 = 1 1 φ (x) 2
3
4
5
如图10-9a中,梁分为5个单元,取结点位移参数(挠度y 和转角θ)作为 广义坐标。在图10-9a中取中间四个结点的八个位移参数 y1、θ1,y2、θ2,y3、 θ3,y4、θ4 作广义坐标。
T
sin t
(10 3)
(10 4)
0 -y y T
t
y cos t
v v
y A
0
t
v
sin t
T t
0
A sin t
-A
3、结构的自振周期
由式
A
y (t ) A sin(t ) 及图,可见位移方程是一个周期函数。 2 y T 周 期: T
⑶ 是结构动力特性的重要数量标志。
泛美大厦,60层 钢结构,南北方向 的基本固有周期为 2.90秒,
大坝,400英尺高的混凝土重力坝的基 本固有周期由强迫振动试验测得在蓄水 为310英尺和345英尺十分别为0.288秒 和0.306秒,
金门大桥,金门大桥桥墩跨距1280.2米全桥总 长2737.4米的悬索桥,其横向振动的基本基本固 有周期为18.20秒,竖向振动的基本基本固有周期 为10.90秒,纵向振动的基本基本固有周期为3.81 秒,扭转振动的基本基本固有周期为4.43秒
ABAQUS+计算+动刚度+详细说明
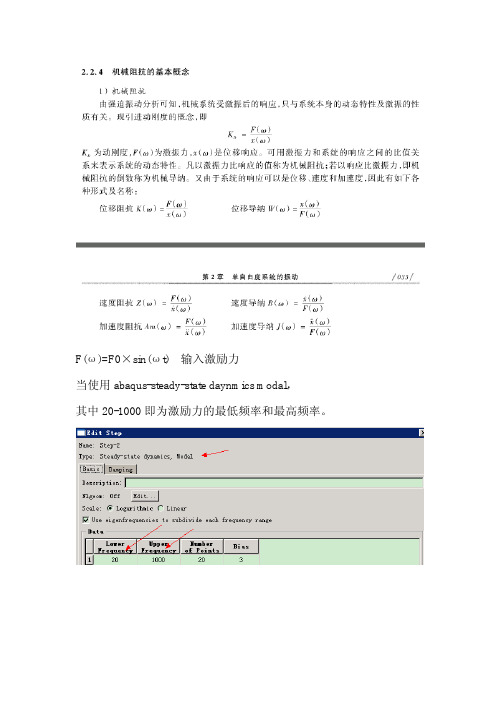
F(ω)=F0×sin(ωt) 输入激励力当使用abaqus-steady-state daynmics modal,其中20-1000即为激励力的最低频率和最高频率。
开始模态和结束模态要覆盖上图所示的激励力的最低频率和最高频率,选择直接阻尼,即每阶模态的临界阻尼比3%,(典型的取值范围在1%-10%)Ma+cv+kx= F0×sin(ωt)其中F0是固定的数值(简谐力的幅值),且频率由20Hz 变化到1000Hz 。
f ••=πω2位移阻抗(动刚度):()()()ωωωx F K =()()t F F ωωsin 0•= 为输入激励力,是一个谐波输入。
()()θωω+•=t x x sin 0 为输出稳态位移响应,根据振动理论,稳态位移响应的频率与输入激励力的频率相同,振幅 0x 和相位角θ均取决与系统本身的物理性质(质量,弹簧刚度,阻尼)和激振力的性质(频率与振幅),而与初始条件无关,初始条件仅影响系统的瞬态响应的振幅和初始相位角。
()ωK ,表示,在某频率下,产生单位位移振幅所需要的激振力幅值。
实际情况下,频率不同,刚度也不同。
假设()ωK =10N/m ,及动刚度在任意频率都是固定的,不随频率的变化而变化(理想情况),即在任意频率激振下,产生1m 单位位移振幅所需要的激振力幅值为10N 。
假设()ωF 的幅值为1 ,()ωK =10N/m()ωx 的幅值x=()()ωωK F =101特点:位移响应的幅值与频率没有关系,且是固定值。
由于在abaqus 中可方便的输出某个点的位移,速度,加速度。
所以通常以某个点的位移,速度,加速度来表征动刚度的大小。
速度阻抗:()()()ωωω•=x F Z 如何将速度阻抗:()()()ωωω•=x F Z 与位移阻抗(动刚度):()()()ωωωx F K =联系起来?用速度表示: ()ω•x = ()ωx 的导数=()θω+•t x sin 0的导数=()'sin 0θωω+••t x =()ωωx •(我们只要幅值,忽略相位角)响应速度与响应位移幅值相差ω,相位角不同,频率相同。
matlab油膜动态刚度和阻尼的程序代码

matlab油膜动态刚度和阻尼的程序代码文章标题:探索Matlab中油膜动态刚度和阻尼的程序代码一、引言在工程领域中,油膜动态刚度和阻尼是润滑系统中重要的参数之一。
它们是描述油膜在润滑油的作用下对载荷的支撑能力和阻尼效果的重要指标,对于机械设备的设计和性能分析有着重要的意义。
本文将以Matlab程序为工具,探索油膜动态刚度和阻尼的计算方法及其程序代码实现。
二、理论基础油膜动态刚度和阻尼的计算是基于流体力学和弹性力学理论的。
动态刚度是描述油膜对外力变化的敏感程度,而阻尼则是描述油膜对振动的消耗能力。
其计算涉及到流体动力学的压力分布计算和弹性体的变形分析。
在Matlab中,我们可以通过数值计算和模拟方法来实现其程序代码。
三、油膜动态刚度的程序代码实现1. 定义油膜几何参数和载荷条件我们需要定义油膜的几何参数,如厚度、长度和宽度,以及外载荷的大小和方向。
这些参数将作为程序计算的输入条件。
2. 计算油膜压力分布根据流体动力学的理论,油膜的压力分布是动态刚度计算的关键。
我们可以利用Matlab中的数值求解方法,如有限差分或有限元法,来计算油膜中的压力分布,并将其作为后续计算的基础数据。
3. 计算油膜动态刚度根据油膜压力分布和外载荷条件,利用弹性力学中的刚度计算公式,我们可以编写Matlab程序来求解油膜的动态刚度,并得到相应的计算结果。
四、油膜阻尼的程序代码实现1. 计算油膜振动频率油膜的阻尼特性与其振动频率密切相关。
在Matlab中,我们可以利用数值模拟方法来计算油膜的振动频率,包括油膜的自由振动频率和受迫振动频率,从而为阻尼的计算打下基础。
2. 计算油膜阻尼比根据振动频率和油膜的阻尼特性公式,我们可以编写Matlab程序来计算油膜的阻尼比,并得到相应的计算结果。
五、个人观点和理解通过对Matlab程序代码的探索和实现,我对油膜动态刚度和阻尼的计算方法有了更深入的理解。
Matlab作为强大的数值计算工具,为工程技术人员提供了便利和高效的计算手段,能够有效地简化复杂的工程计算过程,提高工作效率。
车身模态及接附点动刚度分析

后ꎬ共有 3 104 429 个单元、2 717 029 个节点ꎬ三角
形单元占比为 5 3% ꎮ
表 1 车身材料参数
Table 1 Body material parameters
材料
弹性模量 / MPa
泊松比
钢
2 1 × 10 5
the research objectꎬits finite element model is establishedꎬthe free mode of the vehicle body within
0 ~ 100 Hz and the dynamic stiffness of 16 attachment points is obtainedꎬthe left front and right
格比例较大ꎬ网格主要由四边形单元和少量三角
形单元混合而成ꎬ采用三角形单元是为了获得更
高质 量 的 整 体 网 格ꎬ 其 数 量 不 超 过 单 元 总 数 的
10% ꎮ 组件进行连接时ꎬ主要使用螺栓、点焊和粘
胶三种方式ꎬ车身相关材料参数如表 1 所示ꎮ 车
身厚度约 0 7 ~ 3 2 mmꎬ有限元模型中厚度设置
下的动刚度特性较差ꎬ此时进行模态分析ꎬ通过分
析车 身 模 态 频 率 与 振 型 来 判 断 产 生 峰 值 的 原
因 [13] ꎮ IPI 计算公式为
IPI =
- w2 x0 e jwt - w2
ẍ
- w2
=
=
=
jwt
F
Kd
F0 e
k ห้องสมุดไป่ตู้ w2 m + jwc
(9)
沈 阳 理 工 大 学 学 报
起重机的动刚度及其测试方法
3 起重机动刚度的测试方法
如前所述 ,起重机动刚度的测试 ,实际上就是测 试起重机在规定方向上的自振频率 。对于不同类型 的起重机 ,在不同方向上动刚度的大小 ,相应的标准
— 26 —
图 4 贴应变片法测试与分析框图 《起重运输机械》 1999 (4)
的动刚度 。这一方法的测试精度高于光线示波器 法 ;而采用动态数据采集分析系统则可直接对信号 进行采集和频谱或功率谱分析 ,实时地得到所测的 动刚度 ,具有速度快 、精度高的特点 。 3. 2 压电加速度计法
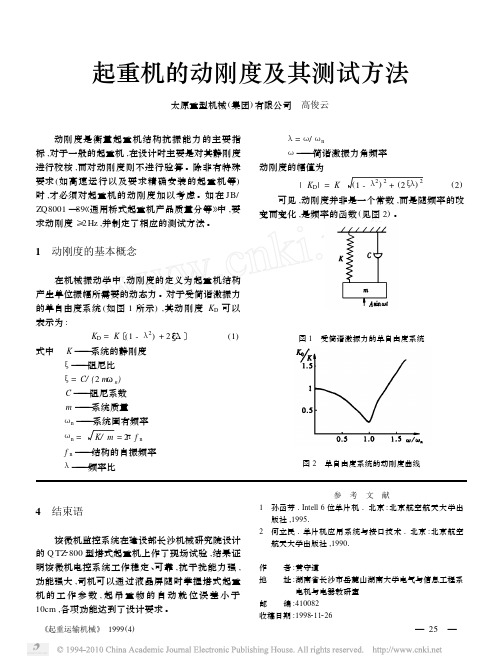
图 1 受简谐激振力的单自由度系统 图 2 单自由度系统的动刚度曲线
4 结束语
该微机监控系统在建设部长沙机械研究院设计 的 Q TZ2800 型塔式起重机上作了现场试验 ,结果证 明该微机电控系统工作稳定 、可靠 ,抗干扰能力强 , 功能强大 ,司机可以通过液晶屏随时掌握塔式起重 机的工作参数 ,起吊重物的自动就位误差小于 10cm ,各项功能达到了设计要求 。
λ= ω/ ωn ω ———简谐激振力角频率
动刚度的幅值为
| KD| = K (1 - λ2) 2 + (2ξλ) 2
(2)
可见 ,动刚度并非是一个常数 ,而是随频率的改
变而变化 ,是频率的函数 (见图 2) 。
1 动刚度的基本概念
在机械振动学中 ,动刚度的定义为起重机结构
产生单位振幅所需要的动态力 。对于受简谐激振力
的单自由度系统 (如图 1 所示) ,其动刚度 KD 可以 表示为 :
KD = K〔(1 - λ2) + 2 ξi λ〕
(1)
式中 K ———系统的静刚度
ξ———阻尼比
ξ= C/ (2 mωn) C ———阻尼系数
m ———系统质量 ωn ———系统固有频率 ωn = K/ m = 2πf n
原点动刚度
一、动刚度的概念对于线性系统,用施加在系统上的力除以位移,即得到了刚度。
刚度是系统固有的特征,与外界施加的力和响应没有关系,即“静止”状态就存在的,所以称之为静刚度。
在静止状态下,在系统上施加力并测量位移,就可以得到静刚度。
在外力的作用下,系统运动起来,其刚度特性随着输入的频率而发生变化。
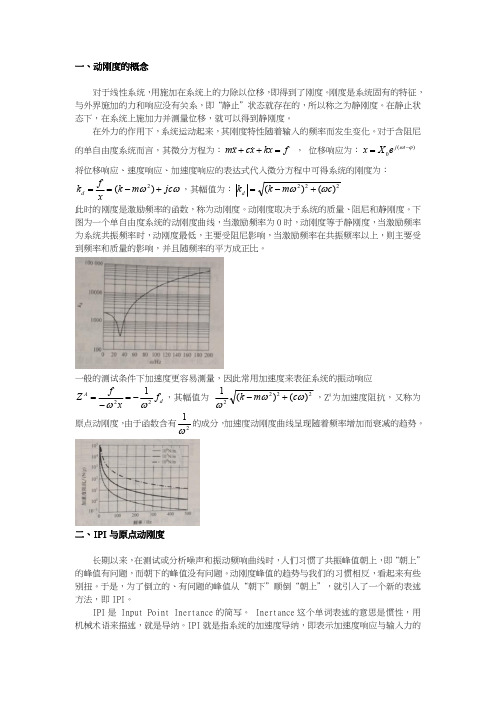
对于含阻尼的单自由度系统而言,其微分方程为:f kx x c xm =++ ,位移响应为:)(0ϕω-=t j e X x 将位移响应、速度响应、加速度响应的表达式代入微分方程中可得系统的刚度为:ωωjc m k xf k d +-==)(2,其幅值为:222)()(c m k k d ωω+-=此时的刚度是激励频率的函数,称为动刚度。
动刚度取决于系统的质量、阻尼和静刚度。
下图为一个单自由度系统的动刚度曲线,当激励频率为0时,动刚度等于静刚度,当激励频率为系统共振频率时,动刚度最低,主要受阻尼影响,当激励频率在共振频率以上,则主要受到频率和质量的影响,并且随频率的平方成正比。
一般的测试条件下加速度更容易测量,因此常用加速度来表征系统的振动响应d A f x fZ 221ωω-=-=,其幅值为2222)()(1ωωωc m k +-,Z A 为加速度阻抗,又称为原点动刚度,由于函数含有21ω的成分,加速度动刚度曲线呈现随着频率增加而衰减的趋势。
二、IPI 与原点动刚度长期以来,在测试或分析噪声和振动频响曲线时,人们习惯了共振峰值朝上,即“朝上”的峰值有问题,而朝下的峰值没有问题。
动刚度峰值的趋势与我们的习惯相反,看起来有些别扭。
于是,为了倒立的、有问题的峰值从“朝下”顺倒“朝上”,就引入了一个新的表述方法,即IPI。
IPI 是Input Point Inertance 的简写。
Inertance 这个单词表述的意思是惯性,用机械术语来描述,就是导纳。
IPI 就是指系统的加速度导纳,即表示加速度响应与输入力的传递函数。
动刚度
动刚度试验系统
在橡胶制品的动态特性中,其动刚度、损耗因子有着及其重要的地位,本文基于ANSYS提出了利用瞬态动力学分析方法来求解简谐载荷下的响应,进而获得橡胶制品的迟滞回线来计算橡胶制品的动刚度、损耗因子的方法。
通过利用该方法对某型橡胶金属环进行了动态特性分析,计算了其动刚度、损耗因子,从计算结果与试验结果对比表明,该方法是行之有效,可以用于橡胶制品的动态特性分析.
一、用途
动刚度试验系统,主要用于弹性体、橡胶弹性体、减振器等进行动静刚度、阻尼系数、阻尼角等参数的测试和耐疲劳性能试验。
本系统能在正弦波、三角波、方波、梯形波、斜波、用户自定义波形下进行多种试验。
二、设备主要技术指标
1、最大动态试验力:5kN;1kN;15kN
2、动态负荷值波动度:
平均负荷波动度:±0.5%,力传感器准确度: 0.5%
负荷振幅波动度: ±2%
3、位移测量范围:±0.01——50mm;分辨率:0.1%;准确度:0.001mm
4、试验频率:0.01—200Hz
5、作动器行程:±50mm
6、试验波形:正弦波、三角波、方波、斜波、锯齿波及各种组合波,外输入采集波等波形
7、试验软件:适应于WINDOWS98/2000/XP系统平台的试验控制软件,计算机实时显示试验过程中静态负荷、动态负荷、试验频率、疲劳次数。
8、具有智能型超载、断裂、位移保护等安全措施。
9、具有设定多个模块疲劳试验管理功能。
三、使用环境和使用范围
1、使用环境:
用于室内环境温度:室温—40℃
2、使用范围
依用户试样尺寸设计试验夹具,满足橡胶弹性体疲劳试验的要求。
阻尼器阻尼比计算公式
阻尼器阻尼比计算公式全文共四篇示例,供读者参考第一篇示例:阻尼器是一种用来减少系统振动幅度并使系统达到稳定状态的装置。
在工程领域中,阻尼器广泛应用于减振和减震系统中,起到了至关重要的作用。
在设计阻尼器时,阻尼比是一个非常重要的参数,它能够影响系统的振动特性和稳定性。
本文将介绍阻尼器阻尼比的计算公式,帮助读者更好地理解并设计阻尼器。
阻尼比通常用ζ来表示,它是一个无量纲的参数,反映了实际阻尼器的阻尼效果相对于临界阻尼效果的大小。
阻尼比越大,阻尼效果越强,系统的振动幅度会更快地减小,系统也会更快地达到稳定状态。
而阻尼比越小,系统的振动幅度会越大,系统达到稳定状态的时间也会更长。
对于线性阻尼器,阻尼比可以通过以下公式进行计算:ζ = c / (2 * √(mk))ζ表示阻尼比,c表示阻尼器的阻尼系数,m表示系统的质量,k 表示系统的刚度。
这个公式描述了阻尼比和阻尼器的特性、系统的质量和刚度之间的关系。
在实际设计中,需要根据实际工程需求和系统参数来确定阻尼比的大小,以确保系统具有良好的稳定性和减振效果。
值得注意的是,阻尼比并不是越大越好,也不是越小越好。
在设计阻尼器时,需要根据系统的振动特性和工作环境来确定合适的阻尼比。
过大的阻尼比可能导致系统反应迟钝,振动幅度较小,但系统稳定性差;而过小的阻尼比可能导致系统振动幅度过大,在系统达到稳定状态前会经历长时间的振荡。
在实际的工程设计中,经常需要通过试验和模拟来确定阻尼比的大小。
通过对系统进行振动分析和实验测试,可以获得系统的振动特性,从而确定合适的阻尼比。
工程师需要综合考虑系统的质量、刚度、工作环境等因素,来确定阻尼比的大小,以实现系统的稳定和减振效果。
阻尼器阻尼比的计算公式为ζ = c / (2 * √(mk)),其中阻尼比反映了阻尼器的阻尼效果相对于临界阻尼效果的大小。
在设计阻尼器时,需要根据系统的振动特性和工作环境来确定合适的阻尼比,以实现系统的稳定和减振效果。
阻尼器的阻尼和刚度计算
阻尼器的阻尼和刚度计算
阻尼器是一种用于减震和减振的装置,主要通过消耗振动能量来减小结构物的振幅和振动。
阻尼器的阻尼和刚度计算是设计阻尼器时需要考虑的重要问题。
一、阻尼计算
阻尼器的阻尼计算需要考虑结构物的质量、刚度和自然频率等因素。
一般来说,阻尼器的阻尼系数越大,阻尼效果越好。
阻尼系数的计算可以采用以下公式:
D = c * M
其中,D表示阻尼系数,c表示阻尼器的阻尼比,M表示结构物的质量。
阻尼比是指阻尼器的阻尼力与结构物动力学响应的比值,通常取值在0.1~0.5之间。
二、刚度计算
阻尼器的刚度计算需要考虑结构物的刚度和自然频率等因素。
一般来说,阻尼器的刚度越小,阻尼效果越好。
刚度的计算可以采用以下公式:
K = (2 * π* f)^2 * M
其中,K表示阻尼器的刚度,f表示结构物的自然频率,M表示结构物的质量。
自然频率是指结构物在没有外力作用下自由振动的频率,通常在设计时需要控制在一定范围内。
总之,阻尼器的阻尼和刚度计算需要综合考虑结构物的质量、刚度和自然频率等因素,以达到减震和减振的目的。
动力学分析中的阻尼(!需要更新一下,图片没有了!)
ANSYS结构动力学分析中的阻尼ANSYS动力学分析中提供了各种的阻尼形式,这些阻尼在分析中是如何计算,并对分析有什么影响呢?本文将就此做一些说明何介绍.一.首先要清楚,在完全方法和模态叠加法中定义的阻尼是不同。
因为前者使用节点坐标,而后者使用总体坐标.1.在完全的模态分析、谐相应分析和瞬态分析中,振动方程为:阻尼矩阵为下面的各阻尼形式之和:α为常值质量阻尼(α阻尼)(ALPHAD命令)β为常值刚度阻尼(β阻尼)(BETA命令)ξ为常值阻尼比,f为当前的频率(DMPRAT命令)βj为第j种材料的常值刚度矩阵系数(MP,DAMP命令)[C]为单元阻尼矩阵(支持该形式阻尼的单元)2.对模态叠加方法进行的谐相应分析、瞬态分析何谱分析,动力学求解方程为:每个模态产生有效阻尼比ξid而不是创建阻尼矩阵α为常值质量阻尼β为常值刚度阻尼ξ为常值阻尼比ξmi为第i个模态的常值阻尼比ξj为第j个材料的阻尼系数Ejs为第j个材料的应变能,ANSYS由{f}T[K]{f}计算得到。
二.对谱分析,阻尼仅仅包含在模态组合里,而在计算模态系数的时候并没有考虑。
当使用模态叠加法时,材料阻尼被添加到扩展的模态中,因此,用户必须在进行模态分析之前,就包括材料阻尼(MP,DAMP)并进行单元应力的计算(MXPAND命令)。
三.模态叠加法支持使用QR阻尼,但是用户必须知道尽管是模态组合方法,阻尼在模态分析中已包含了,所以应该使用上面的完全阻尼矩阵[C]来计算阻尼。
如果使用QR阻尼的的模态提取方法(MOPT,QRDAMP),并且在前处理或模态分析中指定了任何形式的阻尼,那么ANSYS将在进行模态叠加时忽略阻尼。
四.了解MP,DAMP在不同的情况下有不同的作用非常重要。
在完全分析中,材料阻尼代表了该材料的一个刚度矩阵乘子,与粘性阻尼(与频率成线性关系,但针对所有的材料)类似。
因此,在这种情况下,对单自由度结构,材料阻尼值等于ξ/πf或c/k。