机械手总体方案设计.docx
机械手的设计设计word资料22页

天津机电职业技术学院毕业综合实践报告专业电气自动化班级电气自动化三班目录1 机械手的基本介绍 (1)1.1 机械手的基本结构组成 (1)1.1.1 气动手爪 (1)1.1.2 伸缩气缸 (1)1.1.3 回转气缸及垫板 (1)1.1.4 提升气缸 (1)1.2 直线运动传动组件 (1)1.3 气动控制回路 (2)2 传感器部分 (3)2.1 传感器简介 (3)2.2 磁性开关 (3)2.3 光电传感器和光纤传感器 (3)3 伺服电机应用 (4)3.1 伺服系统 (4)3.2 交流伺服系统的位置控制模式 (4)3.3 接线 (5)3.4 伺服驱动器的参数设置与调整 (6)3.4.1 参数设置方式操作说明 (6)3.4.2 面板操作说明: (6)3.4.3 部分参数说明 (7)3.5 最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED) (7)3.6 移动包络 (8)4 PLC程序编写 (10)4.1 PLC的选型和I/O接线 (10)4.2 伺服电机驱动器参数设置 (10)4.3 编写和调试PLC控制程序 (11)4.4 初态检查复位子程序和回原点子程序 (11)4.5 急停处理子程序 (12)个人收获 (13)参考文献 (14)附录 (15)致谢 (17)1 机械手的基本介绍1.1 机械手的基本结构组成1.1.1 气动手爪用于在各个工作站物料台上抓取/放下工件。
由一个二位五通双向电控阀控制。
见图 1-1图 1-1 气动手爪1.1.2 伸缩气缸用于驱动手臂伸出缩回。
由一个二位五通单向电控阀控制。
见图 1-2图 1-2 伸缩气缸1.1.3 回转气缸及垫板用于驱动手臂正反向90度旋转,由一个二位五通单向电控阀控制。
见图 1-3,图1-4图 1-3 气动摆台图 1-4 垫板1.1.4 提升气缸用于驱动整个机械手提升与下降。
由一个二位五通单向电控阀控制。
见图 1-5图 1-5 提升机构1.2 直线运动传动组件直线运动传动组件用以拖动抓取机械手装置作往复直线运动,完成精确定位的功能。
机械手课程设计.doc

《机电系统》课程设计说明书课程设计任务书姓名班级学号设计题目简易型机械手的设计设计任务:(1)方案论证;在其基础上进行机械手的总体设计,并绘制总体布局图。
(2)驱动系统设计:根据机械手的特点,选用舍党的驱动方式,根据总体设计要求进行电机选型。
进行电机选型相关计算。
进行驱动系统零部件的选型和设计。
绘制驱动系统布局图。
(3)控制系统设计:确定机械手的控制方式并进行控制系统的控制与编程。
绘制控制系统布局图。
(4)传感与测试系统设计:进行控制与驱动系统的传感与测试系统的设计。
(5)机械本体设计:进行机械本体零部件设计,绘制总体和零件图。
设计工作量:(1)设计说明书一份(2)CAD图纸5张(3)文档整理排版指导教师设计时间2011年1月3日~2011年1月21日目录第1章绪论 (1)1.1机械手概述 (1)1.2机械手的设计目的 (3)1.3机械手的设计内容 (4)1.4机械手的分类及其在生产中的应用 (5)1.5机械手的应用意义 (8)1.6机械手的技术发展方向 (9)第2章设计方案的论证 (10)2.1机械手的总体设计 (10)2.2机械手腰座结构的设计 (12)2.3机械手手臂结构的设计 (14)2.4工业机器人腕部的结构 (16)2.5机械手末端执行器(手爪)的结构设计 (18)2.6机械手的机械传动机构的设计 (21)2.7机械手驱动系统的设计 (26)2.8机器人手臂的平衡机构设计 (33)第3章理论分析和设计计算 (34)3.1液压传动系统设计计算 (34)3.2电机选型有关参数计算 (43)第4章控制系统的设计 (47)4.1可编程控制器PLC (47)4.2 PLC的选型 (51)4.3机械手的工艺流程 (53)4.4 机械手的PLC控制系统程序 (57)第5章机械手本体设计 (59)5.1 机械手零部件设计 (59)5.2 机械手总成和零件图................................................ . (61)致谢 (62)参考文献 (63)第1章绪论1.1机械手的概述机械手主要由手部、运动机构和控制系统三大部分组成。
夹持式机械手方案设计

夹持式机械手方案设计一、需求背景夹持式机械手在工业自动化领域中发挥着重要的作用。
为满足客户对于夹持式机械手的需求,本文将设计一种夹持式机械手的方案,旨在提高生产效率、降低劳动成本,并同时满足安全可靠的要求。
二、方案设计1. 机械结构设计夹持式机械手的机械结构设计是关键的一环。
我们将采用三段式结构设计,分别为底座、臂和夹具。
底座用于提供机械手的稳定性和支撑力,臂用于实现机械手的柔性运动,夹具用于夹持工件。
机械结构的设计应充分考虑负载能力、运动轨迹和工作范围等因素,以提高机械手的工作效率和稳定性。
2. 控制系统设计控制系统设计是实现夹持式机械手自动化的关键。
我们将采用PLC (可编程逻辑控制器)作为控制核心,通过输入输出模块和传感器实现对机械手的控制与监测。
控制系统设计需要考虑机械手的运动控制、夹持力控制和安全保护等功能,以确保机械手的正常操作和工作安全。
3. 电气系统设计电气系统设计是机械手运行的动力保障。
我们将采用三相交流电作为机械手的供电方式,通过电气控制柜实现对电气元件的控制和保护。
电气系统设计应考虑机械手的供电要求、电源稳定性和电气安全等因素,以确保机械手的稳定运行和安全使用。
4. 软件系统设计软件系统设计是实现机械手智能化的核心。
我们将采用基于编程的方法,编写适应夹持式机械手功能的软件程序,实现机械手的自动化控制和操作。
软件系统设计应充分考虑机械手的运动规划、路径控制和异常处理等功能,以提高机械手的灵活性和智能化水平。
三、方案实施在方案实施过程中,我们将按照以下步骤进行:1. 机械结构的制造和组装:根据设计方案,制造并组装机械手的底座、臂和夹具等组成部分,在此过程中,要确保机械结构的质量和精度,以确保机械手的正常运行。
2. 控制系统的搭建和调试:根据设计方案,搭建PLC控制系统,并通过输入输出模块和传感器与机械手进行连接。
在此过程中,需要进行各个功能模块的调试与联调,确保控制系统的正常工作。
机械手设计方案
机械手设计方案机械手设计方案引言:机械手是一种能模拟人手动作、完成复杂而重复的工作的机械装置。
本方案旨在设计一种功能全面、结构合理、操作简便的机械手。
一、功能设计:该机械手主要用于工业生产中的自动化操作。
设计中考虑到以下几个方面的功能需求:1.抓取能力:机械手需要具备稳定的抓取能力,能够根据需要抓取各种形状的物体。
2.运动自由度:机械手需要具备足够多的运动自由度,能够在空间中灵活操作。
3.力度控制:机械手需要根据不同任务的要求,能够对抓取力度进行精确控制。
4.操作平稳性:机械手的运动应平稳、精确,以实现高效的生产操作。
5.可编程性:机械手应具备可编程功能,可以根据不同任务需求进行多样化的操作。
二、结构设计:机械手主要分为下列几个部分:1.机械臂:机械臂是机械手的核心部分,应具备足够多的关节,以实现多自由度的运动。
同时,机械臂需要采用轻量化设计,以减小自身质量,提高运动效率。
2.末端执行器:末端执行器是机械手抓取物体的部分,应设计可自由伸缩的抓取夹具,以适应不同尺寸的物体。
3.传动系统:传动系统是机械手的动力系统,应选择高效可靠的传动装置,如电机和减速器组合,以保证机械手运动的精确性和稳定性。
4.控制系统:控制系统是机械手的智能核心,应具备高速、高精度、可编程的控制器,以实现机械手的自动化操作。
同时,控制系统应提供友好的人机界面,方便操作者使用。
三、操作流程:机械手的操作流程可分为如下几个步骤:1.输入任务指令:操作者通过控制系统输入任务指令,包括抓取位置、力度等参数。
2.开机准备:机械手启动后,进行预热和校准动作,以确保机械手处于正常工作状态。
3.感应物体:机械手的传感器感应物体位置和大小,确定抓取位置和姿态。
4.抓取物体:机械手根据输入的指令和感应到的物体信息,进行相应的运动和力度控制,将物体抓取起来。
5.完成任务:机械手将抓取的物体移动到指定位置,完成任务,并将完成情况通过控制系统反馈给操作者。
机械手总体方案毕业设计

机械手总体方案毕业设计引言:机械手是一种能够模拟人手动作的自动化装置,广泛应用于工业生产、医疗领域、科研实验等。
本总体方案旨在设计一台能够实现多自由度运动、具备灵活性和精确性的机械手。
一、设计目标:1.实现多自由度运动:机械手设计应具备足够的关节自由度,能够在不同方向和角度进行运动,适应不同工作场景的需求。
2.提高操作灵活性:机械手应具备灵活的手指和手腕,能够适应各种尺寸和形状的物体抓取,而不会因为形变而导致抓取失败。
3.实现精确控制:机械手的运动应具备高精度,并能够实现准确定位和精确操控。
4.提高安全性:机械手设计应考虑安全性,具备防护装置和自动停机等功能,确保操作人员的安全。
二、机械结构设计:1.关节设计:机械手应由多个关节组成,每个关节由电动机驱动,实现灵活的运动。
关节设计应具备足够的承载能力和稳定性,以确保机械手长时间运行的可靠性。
2.手指设计:机械手手指应具备可调节的灵活性,能够适应不同尺寸和形状的物体抓取。
手指可以采用弹性材料或具有可伸缩性的结构,以增加抓取的稳定性。
3.手腕设计:机械手腕部分应具备多自由度运动,既能够实现水平方向的旋转,又能够实现垂直方向的上下移动,以适应不同工作场景的需求。
4.传动系统设计:机械手的传动系统应选择合适的传动方式,如齿轮传动、链条传动等,以确保精确的位置控制和运动控制。
三、控制系统设计:1.电路设计:机械手的控制系统应包括电源、电机驱动器和数据传输装置。
电路设计应考虑供电稳定性、电磁干扰等因素,以确保机械手的正常运行。
2.传感器设计:机械手应搭载合适的传感器,用于感知物体的位置、形状和力度等参数,以实现对物体的准确抓取和操控。
3.控制算法设计:机械手的控制算法应具备实时性和精确性,能够根据传感器信息实现对机械手的准确控制。
常见的控制算法包括PID控制、模糊控制等。
4.用户界面设计:机械手的控制系统应提供友好的用户界面,使操作人员能够方便地操作机械手,并获取相关信息。
机械手总体设计
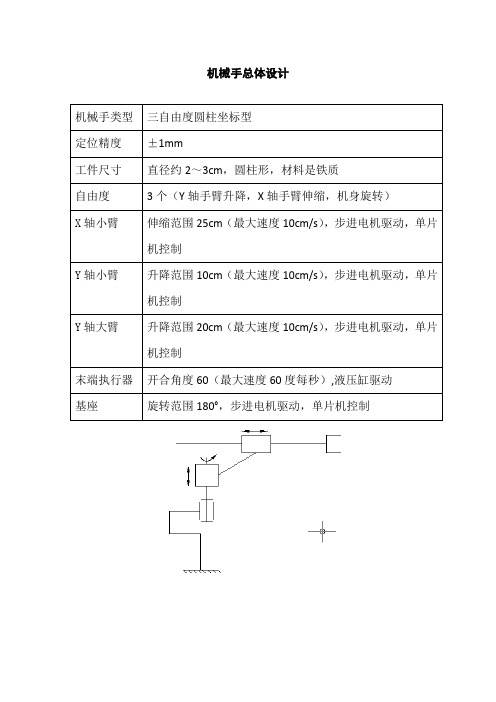
机械手总体设计机械手类型三自由度圆柱坐标型定位精度±1mm工件尺寸直径约2~3cm,圆柱形,材料是铁质自由度3个(Y轴手臂升降,X轴手臂伸缩,机身旋转)X轴小臂伸缩范围25cm(最大速度10cm/s),步进电机驱动,单片机控制Y轴小臂升降范围10cm(最大速度10cm/s),步进电机驱动,单片机控制Y轴大臂升降范围20cm(最大速度10cm/s),步进电机驱动,单片机控制末端执行器开合角度60(最大速度60度每秒),液压缸驱动基座旋转范围180°,步进电机驱动,单片机控制机构简图机械手机械部分设计1执行机构设计机械手的手部,一般称为末端执行器,主要分为,夹钳式取料手、吸附式取料手以及专用操作器和转换器等。
在本次的设计中采用的手部结构为夹钳式取料手,手部由手指和驱动机构、传动机构及连接与支承元件组成。
其中,传动机构有多种,常见的几种分别是斜楔杠杆式、滑槽式杠杆回转型、齿条齿轮杠杆式、四连杆机构平移型等。
在本课题中采用齿条齿轮杠杆式,其机构图所示:齿条齿轮杠杆式手抓2手部结构设计及计算机械手的手爪采用小型气压缸驱动手爪的驱动力计算如下:图:手爪V 形手指的角度,摩擦系数10.0=f根据工业机器人设计,可得工件的加紧力计算公式为:式中 ——安全系数,通常取1.2~2.0,此次设计中取; ——工作情况系数,主要考虑惯性力的影响。
可近似估算为ga 21 K += (4-3)式中 a---运载工件时重力方向的最大上升加速度; g---重力加速度,g ≈2取a=g 时,因此k 2=1+1=2;K 3---方位系数,根据手指与工件形状以及手指与工件位置不同选取在此设计中手爪为水平放置,夹取垂直放置的物体根据工业机器人设计表2-2,即所以,取根据工业机器人设计手册表2-1,齿轮齿条手爪的驱动力与加紧力满足下式:变换可得驱动力即考虑到机械手的实际工作情况,选取手爪的机械效率则气缸内径即活塞杆直径由《液压传动与气压传动》表4-2取气缸工作压力气压负载常用的工作压力在本次的设计要求中,由于并未对末端执行器抓取工件的速度做出明确的要求,同时也是出于降低末端执行器重量及设计难度的考虑,选用单作用气缸。
机械手整体设计方案

关键词:机械手;手部设计;结构设计;
Abstract
动作成
机械手的 运行原理 框图见下图。
图2工作原理框图
(一)执行机构
主要由手掌,手臂,手腕以及立柱和增设行走机构等组成。
1、手部
即与物件接触的部件。因为抓取工件时的姿态不同,大致有夹持式和吸附式两种,此次设计采用夹持式手部结构。夹持式结构简单,主要包括手指和传动部件。
动作五:手臂扭转 动作六:小臂伸出
动作七:机座移动(棒料送入卡盘) 动作八:手部松开
动作九:小臂收缩 动作十:手腕回转
动作十一:机座移回 动作十二:手臂回转
This issue is related to the design of the feeding robot is widely used in industrial processing machinery. It is a kind of tool for grasping or moving the work piece according to the requirements of the industry. The birth of the manipulator, the change of the industrial production of all aspects of the side. And the other two movements of the robot stretch and lift, using bolt and nut adjustment may need to change the robot arm height, length and replacement sucker according to production. Rotation angle: 60 degrees; mode Feeding frequency: 50-60 times / min.
机械手总体方案设计范文
机械手总体方案设计一、背景与目的机械手作为一种智能化、精准高效的装配工具,在工业制造领域中应用较为广泛。
本文的设计目的是为制造业企业提供一种可靠性高、精度高、成本低的机械手总体方案,以提高装配速度、减少劳动成本,提升生产效率,促进企业发展。
二、机械手总体设计方案机械手总体设计需要考虑到机器人的工作环境、工作物体、工作任务、控制要求等多方面因素,我们总结出以下机械手设计方案:1.工作环境基于机器人企业实际应用中资金和场地的限制,我们决定采用基于三轴方案的机械手设计,即机械手的运动空间仅包括X、Y、Z三个轴,安装在固定的平台上进行工作。
2.工作物体本方案的机械手设计主要针对小型零部件装配和物品搬运,静载荷在5KG以内。
根据零部件的尺寸大小、重量等参数,考虑采用柔性指夹爪作为机械手的主夹具,以适应不同形状、大小的零部件抓取和移动。
3.工作任务机械手的主要工作任务是零部件的装配和移动,具体包括:完成零部件间的组装,完成零部件的放置和摆放,根据工艺要求完成零部件的切割、粘接等工作。
4.控制要求机械手控制需要达到以下要求:•精度高:机械手要求定位精度小于0.1mm,重复定位精度小于0.05mm,以确保零部件的精准装配。
•运动快:机械手的最大末端速度要求大于1000mm/s,以保证零部件的高效装配。
•可编程行:机械手的行动需要可以灵活编程,在不同的工艺生产场合中进行。
•安全性高:机械手要求在危险区域、电气扰动等不安全情况下能够及时停止运动。
三、机械手硬件设计1.机械手机构设计机械手机构设计以柔性指夹爪为主夹具,同时根据零部件的特点设计不同的补偿机构,以适应各类工作任务。
2.机械手控制系统设计机械手控制系统包括传感器、控制芯片、控制软件等多个部分,通过这些设备完成机械手的姿态控制、位置控制等功能。
其中,机械手的控制软件需要具备编程灵活、参数调节方便等特点。
3.机械手电气系统设计机械手的电气系统包括各种传感器、控制器、电机及相关电路。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章机械手的总体方案设计
2.1机械手基本形式的选择
常见的工业机械手根据手臂的动作形态,按坐标形式大致可以分为以下4种:
(1) 直角坐标型机械手;(2)圆柱坐标型机械手;(3)球坐标(极坐标)型机械手; (4)多关节型机机械手。
其中圆柱坐标型机械手结构简单紧凑 ,定位精度较高,占 地面积小,因此本设计采用圆柱坐标 型11
1。
图2.1是机械手搬运物品示意图。
图 中机械手的任务是将传送带B 上的物品搬运到传送带AO
2.2、方案设计
(1)、黑箱结构如图2.1所示
图2.2设计方案 (2) 、机械手动作分析及运动分析如图2.3所示,工件首先被机械手夹持,然 后再随之一起运动。
其周期运动可以表现为(按动作顺序):大臂下降一夹紧工 件一手腕上翻一大臂上升一大臂回转一手臂延伸一放松工件一手臂收回一手腕 传
送
带 A 工件 驱动能
信息 自动机械手 —■
工件位置改变 夹持
图2.1机械手基本形式示意
下翻一大臂回转一大臂下降
图2.3机械手运动图(3)、功能原理如图2.3所示
图2.4机械手功能原理图
(4)、方案设计
①传动系统如果机械手采用机械传动,则自由度少,难于实现特别复杂的运动。
而对于组合机床自动上下料的机械手,其工件的运动需要多个自由度才能完成,故不宜采用机械传动方案。
如果机械手采取气压传动,由于气控信号比光、电信号慢得多,且由于空气的可压缩性,工作时容易产生抖动和爬行,造成执行机构运动速度和定位精度不可靠,效率也较低。
电气传动必须有减速装置和将电机回转运动变成直线运动的装置,结构庞大,速度不易控制。
气液联合控制和电液联合控制则使系统和结构上很复杂。
综上所述,我们选择液压传动方式。
②控制系统本机械手是专用自动机械手,选择智能控制方式中的PL(程序控制方式,这样可以使机械手的结构更加紧凑和完美。
③执行系统分析本机械手的执行系统是手部机构。
手部机构形式多样,但综
合其总体构型,可分为:气吸式、电磁式和钳爪式3种。
根据本组合机床加工工件的特征(导卫轮、精密铸钢件),选择钳爪式手部结构。
④常见的工业机械手根据手臂的动作形态,按坐标形式大致可以分为以下4
种:(1)直角坐标型机械手;(2)圆柱坐标型机械手;(3)球坐标(极坐标)型机械手;
(4)多关节型机机械手。
其中圆柱坐标型机械手结构简单紧凑,定位精度较高, 占地面积小,且根据本机械手坐标形式分析分析本机械手臂的运动形式及其组合情况,采用圆柱坐标形式。
因此方案确定机械手采用液压传动方式,PLC空制,钳爪式手部结构,圆柱坐标形式。
2.3、机械手的运动分析
机械手的动作循环(工件平放):大臂下降300m—夹紧工件一手腕回转90°—大臂上升300m—大臂回转90°—手臂延伸500mmτ放松工件一手臂收缩500mr—手腕反转90°—大臂回转90°—大臂下降300mm
本机械手的工作频率是5次∕min ,即12s∕次,也就是说,要在10s时间内完成上述工作循环图中的一次循环。
若采用分步运动的话,那么上述平均每一个动作必须在1.25s内完成,这样必定增加动作的难度和结构的复杂性。
因此,我们在整个运动过程中都将采用协调运动,这样可缓减每个动作的紧迫性。
如图2.5所示,从t=0s时开始,机械手大臂下降,用时2s,大臂下降速度:150 mm/s;t=2s时,机械手做夹紧工件运动;在t=2.5s时开始的还有手腕回转90° ,用时1.5s ;与此同时大臂开始以150 mm/s故上升运动,用时2s。
在t=4.5s 时,大臂开始做回转运动,回转90°,用时1.5s ;在t=6s时,手臂开始做向外延伸500m的运动,运动速度为250mm∕s用时2s;在t=8s时,机械手手指开始做放松工件运动,用时0.5s ;在t=8.5s时,手腕开始做下翻90°的运动,用时1.5s ;与此同时手臂开始收缩,收缩距离500mm平均速度250mm∕s用时2s;在t=10.5s 时,手臂做90°回转运动,用时1.5s。
上诉运动为一个整周期运动,完成上述运
动共用时12s。
运动简图见图2.6所示
图2.6机械手运动简图
2.4、本章小结
本章对机械手的整体部分进行了总体设计,选择了机械手的基本形式以及自由度,确定了本设计采用液压驱动,给出了设计中机械手的一些技术参数。
下面的设计计算将以次进行。