4U-1A型马铃薯收获机数字样机建模与仿真
基于SolidWorks的小型马铃薯收获机改进设计与研究

基于SolidWorks的小型马铃薯收获机改进设计与研究作者:朱景林卢腾来源:《农业开发与装备》 2016年第1期朱景林1,卢腾2*(1.楚雄州农业机械推广站,云南楚雄 675000;2.运城职业技术学院,山西运城044000)摘要:利用SolidWorks三维设计软件,结合云南马铃薯种植区的特点对小型马铃薯收获机进行改进创新,对动力输入与离合器装置、传动装置、振动筛、挖掘铲、机架等零部件进行了三维设计与建模。
通过制造样机再进行田间试验测试其性能指标并对薄弱环节加以改进。
因地制宜研发小型马铃薯收获机,对云南的马铃薯生产具有一定意义。
关键词:云南;马铃薯;小型收获机;SolidWorks0 引言马铃薯是全球继小麦、水稻、玉米之后的第四大粮食作物,不但营养齐全而且价格合理。
云南是马铃薯种植大省,其种植面积仅此于水稻和玉米,但马铃薯机械化水平还很低,机收面积不足1%。
云南省山区面积占全省土地面积的94%,马铃薯主产区又相对集中在土壤贫瘠、缺乏灌溉的丘陵和冷凉的山区和半山区。
云南省的土壤呈粘性,随着土壤含水率的不同,表现出不同的特性[1]。
以上的种种限制,使外省的马铃薯收获机械难以满足云南省当地的需求。
因此加快研制适合云南地区使用的小型马铃薯收获机械显得尤其重要和紧迫,对促进马铃薯产业的发展和农民的增收都具有十分重要的意义。
1 小型马铃薯收获机的结构与原理在本设计中,应用SolidWorks三维设计软件进行辅助设计。
前期进行了相关文献收集,对云南省楚雄、大理、红河等马铃薯种植区进行统计分析和实地调研等,提出设计一种可以依次完成马铃薯的挖掘、土薯分离的小型马铃薯收获机,配套动力为13.24kW的手扶拖拉机。
通过国内同类产品的研究对比和查阅相关的文献资料,小型马铃薯收获机的结构如图1所示,主要由:动力输入装置、传动装置、振动筛、挖掘铲、机架五大部分组成(见图1)。
2 挖掘铲的设计与计算结合云南农村配套动力、土壤特性及马铃薯种植农艺特点等对其进行相应改进。
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是我国重要的农作物之一,其种植面积和产量均位居世界前列。
传统的人工收获劳动强度大、效率低的问题已经成为制约马铃薯产业发展的瓶颈之一。
研究马铃薯联合收获机控制系统设计具有重要的现实意义和实际价值。
针对当前马铃薯产业的现状和需求,本研究旨在设计一套可靠、高效的马铃薯联合收获机控制系统,通过对系统硬件和软件的设计优化,实现对马铃薯联合收获机的智能化控制和全面监测,提高作业效率和准确性,推动马铃薯产业向着智能化、现代化的方向发展。
1.2 研究目的马铃薯联合收获机控制系统的研究目的是为了提高马铃薯收获的效率和质量,降低劳动力成本,并减少人为操作误差所带来的损失。
通过设计一个高效可靠的控制系统,可以实现对收获机的精确控制,使其在不同地形和环境条件下能够稳定运行,实现更加高效的收获作业。
研究马铃薯联合收获机控制系统也有助于推动农业机械化水平的提升,促进农业生产方式的转变,提高农业生产效益,为农业现代化发展做出贡献。
从长远来看,研究马铃薯联合收获机控制系统的目的是为了推动农业科技的进步,提高农业生产的智能化、信息化水平,推动农业现代化建设,促进农业可持续发展。
1.3 研究意义马铃薯是我国重要的粮食作物之一,其产量不断增加,但是传统的人工收获方式效率低下,费时费力。
研究马铃薯联合收获机控制系统设计具有重要意义。
将现代化技术引入到马铃薯收获中,可以提高收获效率,降低劳动强度,节约人力成本。
通过控制系统实现对收获机械设备的智能化操作,可以提高马铃薯的质量和产量,保障粮食安全。
马铃薯联合收获机控制系统设计的研究对于推动农业机械化、智能化发展具有重要意义,有利于提高农业生产效率,推动农业现代化进程。
研究马铃薯联合收获机控制系统设计具有重要的理论和实践意义,对于推动农业生产方式转变,促进现代农业发展具有重要意义。
2. 正文2.1 控制系统设计方案控制系统设计方案是马铃薯联合收获机控制系统的核心部分,其设计的合理与否直接影响到整个系统的性能与稳定性。
4U-1A型马铃薯收获机数字样机建模与仿真

4U-1A型马铃薯收获机数字样机建模与仿真赵运生1,2,杨欣1,李建平1,冯晓静1,刘洪杰1,刘俊峰1(1.河北农业大学机电工程学院,河北保定071001;2.广东工业大学机电工程学院,广州510006)摘要:应用Inventor软件对4U-1A型马铃薯收获机各部件进行参数化建模,构建了整机数字样机,并进行了干涉检查和装配仿真,采用工具模块Dynamic Designer对摆动筛进行运动仿真,分析了筛筐质心点运动速度和加速度。
结果表明:振幅在设计要求30mm范围内时,筛筐质心的速度小于300mm/s,加速度小于400mm/s2,同时确定了关键零件的参数。
关键词:马铃薯收获机;数字样机建模;仿真中图分类号:S225.7+1文献标识码:A文章编号:1003-188X(2010)11-0122-040引言为了缩短设计周期,提高设计效率,避免设计错误,数字化设计与仿真技术已在马铃薯收获机研发中得到应用[1-5],并显示出突出的技术优势。
4U-1A 型马铃薯收获机是一种单行马铃薯收获机,本次设计采用Inventor软件进行参数化建模,以获得其整机数字样机,然后利用MSC.Dynamic Designer分析工具进行筛分运动仿真,获得其运动学参数,以期对振动筛以及相关部件进行优化,得到较好的作业性能。
1整机结构组成和设计要求1.1结构组成与工作原理4U-1A型马铃薯收获机由主机架、挖掘铲、传动装置、纵向输送装置及横向振动筛等组成。
其机构简图如图1所示。
机组作业时,挖掘铲将薯垄挖起;带薯土垡沿铲面向后滑移,下层疏松土壤在铲的指状延伸段开始下漏;输送链边后送边抖动,筛落大部分土壤;薯块、剩余土壤被送到横向振动筛,进一步筛分薯块和泥土;薯块成条被铺放于机器左侧。
1.2设计要求通过分析其它机型马铃薯收获机作业状况和原收稿日期:2010-01-22基金项目:河北省教育厅科技支撑计划项目(09220918);河北农业大学第六批重点教研项目(08-A8);河北农业大学非生命学科与新兴学科科研发展基金项目(Fs20091403)作者简介:赵运生(1983-),男,河北邢台人,硕士研究生,(E-mail)zhaoyun0402@126.com。
基于ADAMS的4UX—550型马铃薯收获机仿真研究的开题报告
基于ADAMS的4UX—550型马铃薯收获机仿真研究的开题报告1. 研究背景随着农业机械化水平不断提高,马铃薯收获机在农业生产中的应用越来越广泛。
在现有的马铃薯收获机中,4UX-550型马铃薯收获机是一款较为先进的设备,其具有收率高、效率高、耐用等特点,受到了广泛的认可和欢迎。
然而,该型收获机的设计和改进需要依托于大量的试验和测试工作,这些工作既费时又费力,成本也很高。
因此,基于仿真技术开展4UX-550型马铃薯收获机的仿真研究,能够明显提高该型马铃薯收获机设计和改进的效率和准确性,具有很大的研究价值。
2. 研究目的本研究旨在基于ADAMS仿真技术,建立4UX-550型马铃薯收获机的仿真模型,并通过仿真模拟其工作过程,以评估其性能、分析其工作流程,并对收获机进行优化设计和改进,以提高其性能和效率。
3. 研究内容(1)4UX-550型马铃薯收获机的结构和工作原理研究;(2)基于ADAMS建立4UX-550型马铃薯收获机的仿真模型;(3)对4UX-550型马铃薯收获机进行仿真分析,评估其性能,分析其工作流程;(4)基于仿真结果对收获机进行优化设计和改进;(5)对优化后的收获机进行仿真分析,评估其性能。
4. 研究方法本文将采用ADAMS软件建立4UX-550型马铃薯收获机的仿真模型,利用ADAMS的仿真分析功能,对收获机的工作过程进行仿真模拟,并对仿真结果进行分析和评估。
同时,结合实际的收获机设计和使用情况,对收获机进行优化设计和改进,并对优化后的收获机进行仿真分析,以进一步评估其性能。
5. 预期成果本研究预计能够建立4UX-550型马铃薯收获机的仿真模型,分析其工作过程、评估其性能,并通过优化设计和改进提高其性能和效率。
研究结果将为4UX-550型马铃薯收获机的设计和改进提供技术支持,也为农业机械化水平的提高做出贡献。
基于CATIA的马铃薯收获机挖掘部件有限元分析
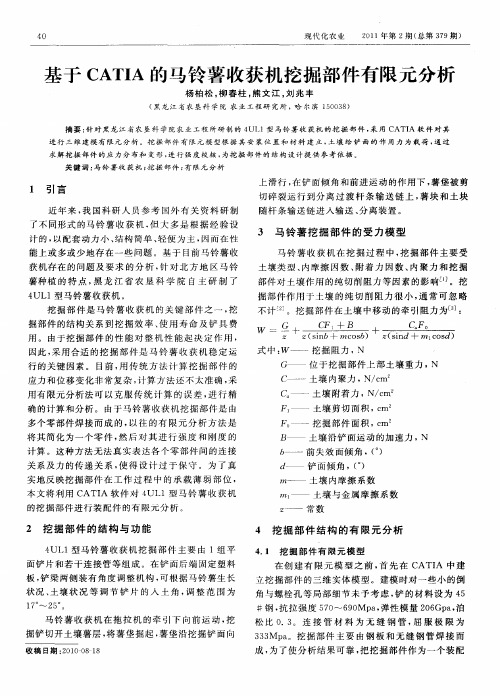
图 3 作 业 时 变 形 五 图
5 结果 分 析 与讨 论
a 从 挖 掘 部 件 的 总 体 应 力 分 布 来 看 , 力 主 要 . 应
分 布在挖 掘铲 与横 梁 之 问的 连接 管 上 , 且 与横 梁 并
越 近 的部 位 应 力 越 大 。 挖 掘 部 件 其 它 部 分 应 力 都 比 较 小且分 布较 为均 匀 。
为使 分 析 能 够 反 映仿 形 挖 掘 部 件 真 实 工 作 状
态 , 要 依 靠 约 束 来 限 制 模 型 的 某 些 自 由度 , 就 以模 拟 真 实 环 境 进 行 分 析 。对 横 梁 所 连 接 的侧 板 的 4个 螺
管 满 足 条 件 。 为 了 降 低 成 本 , 减 轻 部 件 重 量 , 取 并 选 壁 厚为 6 mm 的 钢 管 , 一 步 分 析 其 变 形 情 况 。 进 图 3为 钢 管 壁 厚 6 m 的 挖 掘 部 件 作 业 时 的 变 a r 形 云 图 , 大 位 移 在 铲 尖 处 , 4 3 rm。 最 小 变 形 最 为 .9 a
具 有较 高 的要求 , 挖 掘 部件 在 工 作 时受 到 的作 用 且
力 与 土 壤 状 况 有 很 大 关 系 , 了 安 全 起 见 , 材 料 的 为 将
屈 服 极 限取 为 33 p , 安 全 系数 为 3 3M a 取 。经 分 析 , 壁 厚为 4 mm 钢 管 不 满 足 条 件 , 厚 为 6、 rm 的 钢 壁 8 a
3 马 铃薯 挖 掘 部 件 的 受力 模 型
马铃薯 收 获机 在挖 掘 过程 中 , 掘部 件 主要 受 挖
土壤类 型 、 内摩 擦 因 数 、 着 力 因 数 、 聚 力 和 挖 掘 附 内
基于UG的马铃薯分级装置的设计和仿真

出图纸 的过程 , 过 数 据 转换 直 接 驱 动 加 工 中心 等 通
设备 完成 生产 加工 过程 [ 自从 1 9 . 9 0年 UG软 件进
真分 析从而 实现 优 化设 计 等 的优 点 , 而达 到 了 缩 从
人 中 国市 场 以来 , 以其 先 进 的 理 论 、 大 的工 程 背 强 景 、 善 的功 能 和专 业 的技 术 服务 赢得 了广 大 的用 完
( l g fEn n e ig, n uAg iut rlUnv riy Col eo gie rn Ga s r l a ie st ,La z o 3 0 0 Chn ) e c u n h u 7 0 7 , ia
Ab t a t By u i g Un g a h c o t r ,t r e d me so a o e ft e p t t r d n e ie we e s r c : sn i r p i s s fwa e h e - i n i n lm d l o h o a o g a i g d v c r
关键 词 : 建模 ; 动仿 真 ; UG; 运 马铃薯 ; 分级装 置
中 图分 类 号 : TH1 2 2
1、 ● ● 1
文 献标 识码 : A
● ● 1 ●
文 章 编 号 :10 —3 52 1) 105 —5 0 34 1 (0 0 0—1 60
, ■ ・ t ‘
短农机产品设计周期、 降低开发成本和提高产品质
摘要: 传统 的农业机械设计方法开发周期长 、 成本高 , 采用 虚拟设计 技术可 以达 到有 效控制成 本 , 短生产周 缩
期, 提高农机生产企业市场竞争力 的 目的. 为此 , 本文介 绍 了基 于 U 的农 业机 械产 品虚 拟设计 的方法 , 以马铃 G 并
4U-1000型马铃薯挖掘机的设计与试验
进行 了设计研 究 , 确定 了其结构参数. 结果表 明: 4 U- l O 0 0型马铃薯 挖掘机挖掘 、 输运 流畅 , 分离效果 明显 ; 平均伤薯 率为 3 . 8 3 , 平均损失率为 3 . 5 8 , 平均 明薯率为 9 6 . 8 , 能够满足马铃薯挖掘 的农艺要求.
关键 词 : 马铃薯挖掘机 ; 挖掘铲 ; 分 离机 构 ; 支撑行走轮
t e r s we r e d e t e r mi n e d . Th e r e s u l t s s h o we d t h a t t h e h a r v e s t e r p e r f o r me d s mo o t h l y i n d i g g i n g, t r a n s p o r t i n g
b i l i t y a n d h i g h e r d a ma g e r a t e o f p o t a t o t u b e r s h a r v e s t e r , a p o t a t o t u b e r h a r v e s t e r n a me d 4 U- l O 0 0 wa s d e — s i g n e d . Th e k e y p a r t s o f ma c h i n e , d i g g i n g c o mp o n e n t s , d e t a c h i n g me c h a n i s m, s u p p o r t i n g wa l k i n g wh e e l s r e g u l a t i n g me c h a n i s m a n d c h a i n t r a n s mi s s i o n s y s t e m we r e d e v e l o p e d a n d s t u d i e d, a n d t h e s t r u c t u r e p a r a me —
基于UG与MatLab马铃薯挖掘机分离筛仿真与优化

化方 案 。首 先 ,采 用 理 论 分 析 与 虚 拟 仿 真 技 术 结 合 的 方 式 对 分 离 筛 的 摆 杆 与 筛 条 的 长 度 进 行 研 究 ,根 据 研 究 结
果 对 摆 杆 与 筛 条 长 度 做 出 修 改 ; 其 次 ,采 用 优 化 设 计 的 方 法 寻 找 目 标 函 数 ,确 定 影 响 目 标 的 边 界 条 件 ,从 中 寻 找
薯挖掘机仍存在着薯土分离效果不佳和马铃薯破损
摆动分离筛作为马铃薯挖掘机实现筛分功能的核
率高的缺陷。目前,市场上使用较广的中小型马铃薯 心部件,分离筛的结构示意图如图 1 所示。设筛面倾
挖掘机主要有升运链式和升 运 链—分 离 筛 式 两 种 机 角为 ε,摆动方向角为 α,摆杆倾角为 β。机构的运动
19) ; 内 蒙 古 自 治 区 高 等 学 校 学 科 科 学 研 究 项 目 ( NJZY16059) 作者简介: 李 建( 1991 - ) ,男,山东莱阳人,硕士研究生,( E - mail) 1903642302@ qq. com。 通讯作者: 王春光( 1959 - ) ,男,内蒙 古鄂尔 多斯 人,教 授,博士 生 导 师,( E - mail) jdwcg@ imau. edu. cn。
2019 年 11 月
农机化研究
第 11 期
基 于 UG 与 MatLab 马 铃 薯 挖 掘 机 分 离 筛 仿 真 与 优 化
李 建,王春光,谢胜仕,邓伟刚
( 内 蒙 古 农 业 大 学 机 电 工 程 学 院 ,呼 和 浩 特 010018 )
摘 要: 针 对 升 运 链 — 分 离 筛 式 马 铃 薯 挖 掘 机 工 作 时 薯 土 筛 分 不 彻 底 及 马 铃 薯 破 损 率 高 的 缺 陷 ,提 出 了 一 种 优
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 传动装置 .
4 纵向输送装置 .
5 挖 掘铲组件 .
图 1 马铃薯收获机结构简图
Fi. T e sr cu e o h oa o l t r g1 h tu t r ft e p t t i e f
机组 作 业 时 , 掘 铲 将 薯 垄 挖 起 ; 薯 土 垡 沿 铲 挖 带 面 向后 滑移 , 层疏 松 土壤 在 铲 的 指 状延 伸 段 开 始 下 下
确 定 了关 键 零件 的参 数 。 关 键 词 :马 铃 薯 收 获 机 ;数 字 样 机 建 模 ;仿 真
中 图分 类 号 :S 2 . 1 2 57 文 献标 识码 :A
文 章 编 号 :1 0 0 3—1 8 2 1 ) 1一 1 2一 4 8 X( 0 0 1 O 2 O
1 整 机 结 构 组 成 和 设 计 要 求
1 1 结构 组成与 工作 原理 .
4 U一1 A型 马铃 薯 收获 机 由主 机架 、 掘铲 、 动 挖 传 装置 、 向输送 装置 及 横 向振 动 筛 等 组 成 。其 机 构 简 纵
图如图 1 示。 所
1横 向振动筛 .
2 机架 .
支 持功 能 , 构 建 机 械 数 字 样 机 的 理 想 平 台。 采 用 是
・
基 金 项 目 :河 北 省 教 育 厅 科 技 支 撑 计 划 项 目 ( 9 2 9 8) 河 北 农 业 大 020 1 ;
学第 六批重点教研项 目( 8一A ) 河北农 业大学非生命 学 0 8;
科 与 新 兴 学 科 科 研 发 展 基 金 项 目 ( s0 9 4 3) F2 0 10 作 者 简 介 : 赵运 生 (9 3一) 男 , 北 邢 台 人 , 士 研 究 生 , E—ma ) 18 , 河 硕 ( i l
0 引 言
为 了缩短 设 计 周 期 , 高 设 计 效 率 , 免 设 计 错 提 避 误 , 字化 设 计 与仿 真 技 术 已在 马铃 薯 收 获 机 研 发 中 数 得 到 应 用 并 显 示 出 突 的 技 术 优 势 。4 一1 U A
样 机 田间试 验 情 况 。J本 次设 计 主 要是 对 整 机 结 构 , 参 数 和输 送筛 分 装置 进 行 调 整 和 优 化 , 括 以下 3方 包
面 : 在保 证 挖净 的前 提下 , 免 机 前 壅 土 , ① 避 减小 筛 分 部 件 负荷 ; 为减 小 二 次 筛 分 蹭 破 马 铃 薯 块 表 皮 , ② 控
制振幅为 3 r 0 m左右工作 ; 保持 整机结构 紧凑 , a ③ 操
作简单 , 动力 消 耗低 。
型 马铃薯 收 获机 是一 种 单 行 马 铃 薯 收 获 机 , 次 设计 本
1 2 设计 要求 .
数 字样 机技 术 是 以 C X F , A /D X 技术 为基 础 , 以机 械 系统 运动 学 、 力 学 和 控 制 理 论 为 核 心 , 合 虚 拟 动 融
现 实和 计算 机 仿真 技 术 , 分 散 的产 品设 计 和工 程 分 把 析 过程 集成 在 一 起 , 产 品 的设 计 者 、 造 者 和 使 用 使 制 者 在产 品 开发 初 期 直 观 形 象 地 对 数 字 化 的 虚 拟 产 品
采用 Ivno 软 件 进 行 参 数 化 建 模 , 获 得其 整 机 数 net r 以
字样 机 , 然后 利 用 MS . y a i D s n r 析 工 具 进 C D n m c ei e 分 g
行 筛 分运 动 仿 真 , 获得 其 运 动学 参 数 , 期 对 振 动筛 以 以及 相关 部 件进 行优 化 , 到较 好 的作 业性 能 。 得
2 马铃 薯 收 获 机 数 字 样 机 建 模
2 1 数字 样机 技术 和 Iv no 简 介 . n e tr
漏; 输送 链 边 后 送 边 抖 动 , 落 大 部 分 土 壤 ; 块 、 筛 薯 剩
余 土壤 被送 到 横 向 振 动 筛 , 一 步 筛 分 薯 块 和 泥 土 ; 进 薯 块成 条被 铺 放 于机 器左 侧 。
21 0 0年 1 1月
农 机 化 研 究
第 1 1期
4U 一1 型 马 铃 薯 收 获 机 数 字 样 机 建 模 与 仿 真 A
赵运 生 ,杨 欣 ,李 建 平 ,冯 晓静 ,刘 洪杰 ,刘 俊 峰
( . 北 农 业 大 学 机 电 工 程 学 院 ,河 北 保 定 1河 0 1 0 ;2 广 东 工 业 大 学 机 电 工 程 学 院 , 广 州 5 0 0 ) 70 1 . 1 0 6
通 过分 析 其 它 机 型 马 铃 薯 收 获 机 作 业 状 况 和 原
收 稿 日期 :2 1 0 2 0 0— 1— 2
原型进行设计优化 、 性能测试 、 制造仿 真和使用仿 真 ,
为 产 品 的研 发 提供 全 新 的数 字化 设计 方 法 。 Ivno 是 基 于特 征 的 三 维参 数 化建 模 与仿 真 软 net r 件 , 集 成 了零 件 造 型 、 件 装 配 、 达 视 图 、 程 图 它 部 表 工 纸 、 程分 析 ( 动仿 真 与有 限元 分 析 ) 工 运 和信 息 管理 等
摘
要 : 应 用 Ivno 软 件对 4 ne t r U一1 型 马铃 薯 收获 机各 部 件 进 行参 数 化 建 模 , A 构建 了整 机 数 字 样 机 , 进 行 了 并
干 涉 检查 和 装 配仿 真 , 用 工具 模 块 D nmi D s nr对 摆 动 筛进 行 运 动 仿 真 , 析 了筛 筐 质 心 点 运 动 速 度 和 加 采 y a c ei e g 分 速 度 。结 果 表 明 : 幅在 设计 要 求 3 r 范 围 内时 , 筐 质 心 的速 度小 于 3 0 m/ , 速 度 小 于 4 0 m/ 同时 振 0 m a 筛 0 m s加 0 m s,