数字通信 王兴亮 第6章 修订
数字通信 王兴亮 第4章 修订
第 4 章 模拟信号的数字传输
(a)
Xδ (ω)
0 Xδ (ω )
ω
(b)
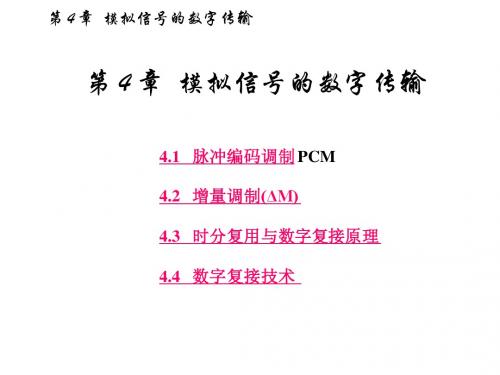
f s= 2 f x
0 Xδ (ω )
ω
(c) f s> 2 f x
0 Xδ (ω )
ω
(d)
图 4-4 Xδ(ω)频谱
f s< 2 f x
0
ω
第 4 章 模拟信号的数字传输 3. 实际抽样 (1) 自然抽样。 自然抽样信号xs(t)是x(t)和抽样脉冲序列s(t)的乘积:
2
(dB)
(4-17)
第 4 章 模拟信号的数字传输 当Am=V时,得到正弦测试信号量化信噪比为
Sq Nq
6 k 1 . 7 ( dB ) max
(4-18)
由式(4-17)、(4-18)可知,每增加一位编码,量化信噪比就提 高6dB。
第 4 章 模拟信号的数字传输 例 4-2 实际语音信号的概率密度函数可用拉普拉斯分布来 表示,即
1Δ
xq
- 3 Δ - 2 Δ -Δ
2Δ 3Δ
x
- Δ
2 3 - Δ 2 5
- Δ-
5 2
3 Δ- Δ 2 2
Δ -Δ - 2Δ - 3Δ
2
3 5 Δ Δ 2 2
x
- Δ
2
(b)
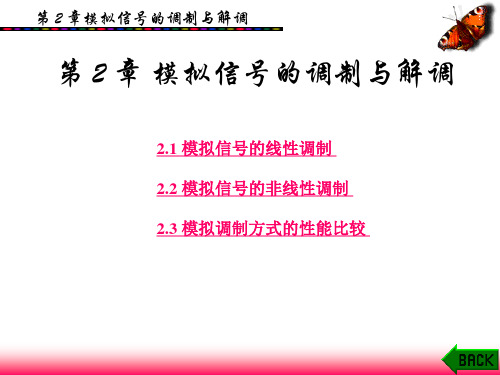
图 4-12 两种常用的均匀量化特性( c )
第 4 章 模拟信号的数字传输 (3) 量化信噪比。量化信噪比是衡量量化性能好坏的指标, 其中式(4-14)给出量化噪声功率,按照上面给出的条件,可得
就得到由8段直线组成的折线。由于y轴是均匀分为8段的,每
段长度为1/8,而x轴是不均匀分成8段的,每段长度不同,因
王兴亮数字通信原理
第 2 章模拟信号的调制与解调
单边带信号的带宽 BSSB=fm
单边带信号的解调和双边带一样,不能采用简单的包络 检波,因为它的包络不能直接反映调制信号的变化,所以仍 然需要采用相干解调。
第 2 章模拟信号的调制与解调
2.1.4 残留边带调幅(VSB)
当调制信号x(t)的频谱具有丰富的低频分量时,如电视和 电报信号,已调信号频谱中的上、下边带就很难分离,这时用 单边带就不能很好地解决问题。那么,残留边带就是解决这种 问题一个折衷的办法。
图2-13中,sc(t)为已调信号,n(t)为信道叠加的高斯白噪声,经 过带通滤波器后到达解调器输入端的有用信号为si(t),噪声为 ni(t),解调器输出的有用信号为so(t),噪声为no(t)。
若白噪声的双边功率谱密度为n0/2, 带通滤波器是高度为1、 带宽为B的理想矩形函数,则解调器的输入噪声功率为
(4) 要使已调波不失真,必须在时域和频域满足以下条 件:在时域范围内, 对于所有t,必须
| x(t) |max A0
(2 - 3)
已调波的包络和x(t)的形状完全相同,用包络检波的方法很容易恢复出原
始的调制信号。 否则将会出现过调幅现象而产生包络失真。
在频域范围内, 载波频率应远大于x(t)的最高频谱分量,即
sAM
()
A0[
(
c
)
(
c
)]
1 2
[
X
(
c
)
X
(
c
)]
第 2 章模拟信号的调制与解调
图2 - 2 AM (a) 调制信号; (b) 叠加直流的调制信号; (c) 载波信号; (d) 已调波信号
第 2 章模拟信号的调制与解调
现代通信系统-数字基带传输系统

现代通信系统Simon Haykin 《通信系统》(第四版)电子工业出版社教材和参考文献◆Simon Haykin ,《通信系统》(第四版),电子工业出版社,2003◆樊昌信等,《通信原理》,第6版,国防工业出版社,北京,2006◆曹志刚、钱亚生,《现代通信原理》,清华大学出版社,北京,1992年◆王文博,郑侃, 宽带无线通信OFDM 技术. 北京: 人民邮电出版社, 2003◆P.W. Wolniansky, G.J. Foschini,ect. V-BLAST: An Architecture for Realizing Very High Data Rates Over the Rich-Scattering Wireless Channel, Bell Laboratories, Lucent Technologies.S M Alamouti ◆S.M.Alamouti,Simple Transmit Diversity Technique for Wireless Communications,IEEE Journal On Select Areas in Communications,Vol.16,No.8,Oct.1998◆与之有关的paper 、书籍和网页第六章数字基带传输系统第节高斯信道的最佳接收第一节高斯信道下的最佳接收一传输模型、传输模型t=t 0y(t 0)()(),()()g t G f b t B f ⇔⇔第六章数字基带传输系统第一节第节高斯信道下的最佳接收二、最佳接收滤波器的设计[0,],()()(),[0,]x t t w t t T y t g t n t t T =+∈=+∈0022000()()(),[,[,()()()()()()()()s s j ft j ftg g t g t b t B f G f edf g t B f G f e dfN ππ+∞+∞-∞-∞+∞=*=⇒=⎰⎰其中,20()()n out P B f df =⎰第六章数字基带传输系统第一节第节高斯信道下的最佳接收三、t 0的确定t 0=T s:已知矩形脉冲,[0,]()0[0s a t T g t ∈⎧=⎨例10,[0,]s t T ∉⎩1.求其匹配滤波器的冲激响应2求匹配滤波器输出的有用信号表达式及最佳抽样时刻信号幅值2.求匹配滤波器输出的有用信号表达式及最佳抽样时刻信号幅值3.计算输出噪声功率4.画出最佳接收机框图第六章数字基带传输系统第一节第节高斯信道下的最佳接收1()()s b t kg T t =-、sT +∞'''--=+-002()()()()()()()(),[0,2],1s s s t s T t t g t g t b t kg T g t d kg g t T d g d t T ka k ττττττττ-∞-+=*=⎧∈=⎪⎰⎰⎰、其中()1tka g d ττ⎪=⇔⎨⎰第节高斯信道下的最佳接收第一节4、第六章数字基带传输系统第一节第节高斯信道下的最佳接收例2:画出双极性非归零矩形脉冲基带传输系统的最佳滤波器结构111()()s b t k g T t =-第六章数字基带传输系统第二节第节传输中的码间干扰一、传输模型()w t t ')na ()x na ()s t (y t ()g t ()c t ()b t第六章数字基带传输系统第二节第节传输中的码间干扰一、传输模型+∞'∑()()()()()()nsn nss t a t nT s t s t g t a g t nT δ=-∞+∞=-'=*=-∑原始信号:成型滤波后的基带信号:n =-∞第六章数字基带传输系统第二节第节传输中的码间干扰二、无码间干扰条件——奈奎斯特第一准则(一)时域条件1(0)()、时域条件1,()0,(0,)s m h mT m m Z =⎧=⎨≠∈⎩(二)、频域条件()()()(),()()s sssm h t h mT t mT H f h t H f R d T T d δ+∞=-∞+∞+∞+∞+∞=-⇔⇔∑令,2222()()()()()(0)(0)1j ftj ft s ss ss s n m j ftj ft H f R H f nR h t e dt h mT t mT e dth mT t mT edt h t e dt h ππππδδδ---∞-∞=-∞=-∞+∞+∞+∞--=-==-=-===∑∑⎰⎰则()()()()()()s s m s sH f R -∞-∞=-∞=∑⎰⎰即()1sn H f nR +∞=-∞-=∑,()1(),[/2,/2]ssssssR H f nR H f nR T f R R +∞+∞-=⇒-=∈-∑∑因此最后得:第六章数字基带传输系统第二节第节传输中的码间干扰三、满足奈奎斯特第一准则的滤波器(一)理想低通滤波器()、理想低通滤波器()H f sT sin(/)()(/)s s t T h t sa t T ππ==第六章数字基带传输系统第二节第节传输中的码间干扰三、满足奈奎斯特第一准则的滤波器(二)升余弦滤波器h(t)(二)、升余弦滤波器H(f)1+ff1 f1f2第六章数字基带传输系统第二节第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则()w t ()s t 'nb tc t na '()s t sT na ()y t ()g ()()b t ()()(),[/2]sin(/s v t h t h t T R R =+-→∈-部分响应系统()[/2]cos[/s H f R T T π=∉-2[)][4(/s T 2]H +第节传输中的码间干扰第二节四、部分响应系统——奈奎斯特第二准则第六章数字基带传输系统第二节第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则1,/2/sc s c R B R B baud Hzη===、特点:2第六章数字基带传输系统第二节第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则()实际部分响应系统(一)、实际部分响应系统nb c 'nc na na '()y t BNRZ第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则()特点(二)、特点1、没有误码传播2、多于两个的电平直流和低频分量仍然较大3、直流和低频分量仍然较大第六章数字基带传输系统第二节第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则(三)常见的部分响应系统(三)、常见的部分响应系统= 121(1)(mod )n n n N n N n a R b R b R b L L a ---+++ 预编码:其中为输入符号的电平数121(1)n n n N n N c R b R b R b ---=+++相关编码:第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则(三)、常见的部分响应系统(三)常见的部分响应系统第IV类部分响应系统第节传输中的码间干扰四、部分响应系统——奈奎斯特第二准则(四)部分响应系统的特点(四)、部分响应系统的特点1、同时满足高频带利用率和旁瓣衰减快的要求同时满足高频带利用率和旁瓣衰减快的要求2、相同的发送功率,系统的误码率将增加第六章数字基带传输系统第三节第节数字基带传输系统的误码率一、传输模型和假设1、加性高斯白噪声:/2N 高斯声02、双极性非归零矩形脉冲,“0”—>-a ,p(0);“1”—>+a ,p(1)3、讨论最佳判决门限以及系统的最小误码率第六章数字基带传输系统第三节数字基带传输系统的误码率二、误码率的计算(以双极性非归零矩形脉冲系统为例)2(),("1")s s ka T n kT ⎧+⎪= 222()2()(),("0")1n s s s y A y y kT ka T n kT σ--⎨-+⎪⎩⎧==122()2f y s a e N k a T πσ⎪⎪第六章数字基带传输系统第三节数字基带传输系统的误码率二、误码率的计算(以双极性非归零矩形脉冲系统)0110(0)(0)0,e e e e p p p p p dp →→=+=因此,系统误码率为令d λ第六章数字基带传输系统第四节系统均衡一、迫零均衡()w t ()s t 'na ()x t n a '()s t ()y t ()g t ()c t ()b t ()(g tc Q f *()()()B f g t t ⇔*⇔⎧1,(1,()0,(0,()m m m Z =⎧→⎨⎨≠⎩⎩迫零不全等于第六章数字基带传输系统第四节系统均衡二、基于最小均方误差准则(MMSE)的均衡方法()()()()()()()k s q t g t c t Q f x t a q t kT w t +∞*⇔=-+∑ ()()()()()()()k k s k y t b x t d b a q t kT d b w t d τττττττττ=-∞+∞+∞+∞+∞-∞-∞-∞=-∞=-=--+-∑⎰⎰⎰()()()()()s k s s s k y iT a q iT kT b d b w iT d ττττττ+∞+∞+∞-∞-∞=-∞⇒=--+-∑⎰⎰i in ξ+第六章数字基带传输系统第四节系统均衡三、最小基于最小均方误差准则(MMSE)的均衡方法2()-=+-=0()(),1[()()]()()2()()2s i i s i i i i i q y iT a e y iT a n a J E e N J R t t b t b dtd b t q t dt ξτδτττ+∞+∞+∞-∞-∞-∞+∞+∞==+-+---⎰⎰⎰考虑与的之间的差值:并计算均方误差:2()()()()()R q kT q kT S f R Q f kR ττ=-⇔=+∑∑其中,第六章数字基带传输系统第四节系统均衡三、基于MMSE准则的均衡器结构201()(),(b t B f N R kR +∞''⇔++ 若)2s s k Q f =-∞∑第六章数字基带传输系统第四节系统均衡三、基于MMSE准则的均衡器结构有限长MMSE准则的均衡器结构峰值畸变:+∞四、基于MMSE准则的自适应均衡器结构第六章数字基带传输系统小结一、基于匹配滤波器的最佳接收二、码间干扰和部分响应系统三、数字基带传输系统的抗噪声性能数字基带传输系统的抗噪声性能四、系统均衡。
通信系统原理教程(第二版)(王兴亮)第1-3章章 (2)
(1) 卷积运算是无序的,即x1(t)*x2(t)= x2(t)* x1(t) ; 而 相关函数的积分运算是有序的,即R12(τ)≠R21(τ)。
(2) 对于同一个时间位移值,相关函数的积分运算与卷积运算 中位移函数的移动方向是相反的。
设xT(t)为x(t)在一个周期内的截断信号,
x(t)
xT (t)
0
T 2t T 2
其他
(2-15)
第2章 信号、信道及噪声
那么
XT () F[xT (t)]
xT
(t
)e
jt
dt
从而推出
X
()
2π T
XT
()
n
(
n0 )
0 XT (n0 ) ( n0 ) n
比较式(2-14)与式(2-16)可得
Vn
1 T
X T (n0 )
(2-16) (2-17)
第2章 信号、信道及噪声 2.1.4 信号的能量谱密度和功率谱密度
1. 能量信号的能量谱密度函数(帕塞瓦尔定理) 能量信号x(t)是指在时域内有始有终, 能量有限的非周期 信号。 对能量信号x(t),可用其频谱密度函数X(ω)及信号的能量 谱密度函数G(ω)来描述。 设能量信号x(t)频谱密度函数为X(ω), 信号的能量为
1. 互相关函数
设x1(t)和x2(t)为两个周期功率信号, 则它们之间的互相 关程度用互相关函数R12(τ)表示,且被定义为
R12
(
)def
1 T0
T0
2 T0
x1(t)x2 (t
(完整版)王兴亮数字通信原理
第1章 绪 论
通信从本质上讲就是实现信息传递功能的一门科学技 术,它要将大量有用的信息无失真、高效率地进行传输, 同时还要在传输过程中将无用信息和有害信息抑制掉。当 今的通信不仅要有效地传递信息,而且还有存储、处理、 采集及显示等功能,通信已成为信息科学技术的一个重要 组成部分。
第1章 绪 论
凡信号的某一参量可以取无限多个 数值,且直接与消息相对应的,称 2.按信道为中模所拟传信信号号。的模不拟同信分号有时也称连 信道是传续输信信号号的通路。
模拟通信:信道中传送的信号为模拟信号; 数字通信:信道中传送的信号为数字信号。
凡信号的某一参量只能取有限个 数值,并且常常不直接与消息相 对应的,称为数字信号。数字信
我国自20世纪70年代起,开始将卫星通信用于国际通 信,从1985年起开始发展国内卫星通信。至今,我国已发 射5颗同步通信卫星,。
第1章 绪 论
卫星通信中目前大量使用的是模拟调制及频分多路和频 分多址技术。如同其他通信方式一样,其发展方向也是数字 调制、时分多路和时分多址。
第1章 绪 论
5. 移动通信 移动通信是现代通信中发展最为迅速的一种通信手段, 它是随着汽车、飞机、轮船、火车等交通工具的发展而同 步发展起来的。近年来,在微电子技术和计算机技术的推 动下,移动通信从过去简单的无线对讲或广播方式发展成 为一个把有线、无线融为一体,固定、移动相互连通的全 球范围的通信系统。 目前广泛应用的是第二代移动通信系统,采用窄带时 分多址(TDMA)和窄带码分多址(CDMA)数字接入技术,已 形成的国家和地区标准有欧洲的GSM系统、美国的IS-95 系统、日本的PDC系统。我国主要采用欧洲的GSM系统。
数字通信原理与技术(王兴亮)第 6 章 同 步 系 统

第6章同步系统 插入导频法也可以分为两种:一种是在频域插入,即在发 送信息的频谱中或频带外插入相关的导频;另一种是在时域插 入, 即在一定的时段上传送载波信息。 对载波同步的要求是:发送载波同步信息所占的功率尽 量小,频带尽量窄。载波同步的具体实现方案与采用的数字调 制方式有着一定的关系。也就是说,具体采用哪一种载波同步
u d K d sin M
可以看出,M次方环的非线性处理方式是在中频上进行 的。通过M次倍频后,键控信号的调制信息被消除,产生了 M倍载频分量;然后用普通锁相环对M倍载频分量进行跟踪, 由此得到了参考载波。M次方环的鉴相特性为正弦型,它具 有M重相位模糊。
第6章同步系统
6.2.2 特殊锁相环法
则鉴相器输出为 u K u u d m 1 2
取基波
1 8
K m U m 1U m 2 sin 4 ( 2 1 )
4
K d sin 4
第6章同步系统
图 6-4 四次方环鉴相特性
第6章同步系统 同样原理,对MPSK信号就可以采用M次方环,其原理方 框图与图 6 - 3 相似。M次方环的鉴相特性为
图 6-12 插入导频的VSB信号的载波提取
第6章同步系统 3. 时域插入导频法
位 同 步 t0 t1 帧 同 步 t2 载 波 同 步 t3 第一 帧 (a) 接收 信号 带通 解调 信息 位 同 步 t4 第二 帧 帧 同 步 载 波 同 步 信息
线性 门 门控 信号 锁相 环 鉴相 器 环 路 压 控
经过低通滤波器后分别得
v x ( t ) cos 5 2 1 v x ( t ) cos 6 2 v5, v6经过乘法器后得 1 2 1 2 v7 v5 v6 x ( t ) sin cos x ( t ) sin 2 4 8
数字通信原理(第二版)PDH与SDH

二、 PCM复用和数字复接
扩大数字通信容量,形成二次群以上 的高次群的方法通常有两种:PCM复用和 数字复接。
1. PCM复用
所谓PCM复用就是直接将多路信号编 码复用。
2. 数字复接
数字复接是将几个低次群在时间的空 隙上迭加合成高次群。
图5.2 数字复接的原理示意图
三、 数字复接的实现
图5.9 正码速调整电路和码速恢复电路
图5.10 脉冲插入方式码速调整示意图
2. 异步复接二次群帧结构
ITU-T G.742推荐的正码速调整异 步复接二次群帧结构如图5.11(b)所示。 异步复接二次群的帧周期为 100.38μs, 帧长为848bit。其中有4×205 =820bit(最少)为信息码(这里的信息 码指的是四个一次群码速变换之前的码 元,即不包括插入的码元),有28bit的 插入码(最多)。
图 5 7 二 次 群 同 步 复 接 、 分 接 方 框 图
.
3. 同步复接二次群帧结构
图5.8 二次群同步复接的帧结构
二、 异步复接
1. 码速调整与恢复
码速调整是利用插入一些码元将各 一次群的速率由2048kbit/s左右统一调 整成2112kbit/s。接收端进行码速恢复, 通过去掉插入的码元,将各一次群的速 率由2112kbit/s还原成2048kbit/s左右。 码速调整技术可分为正码速调整、 正/负码速调整和正/零/负码速调整三种。
这样的复接系列具有如下优点: (1)易于构成通信网,便于分支与 插入,并具有较高的传输效率。复用倍 数适中,多在3~5倍之间。 (2)可视电话、电视信号以及频分制 群信号能与某个高次群相适应。 (3)与传输媒介,如对称电缆、同 轴电缆、微波、波导、光纤等传输容量 相匹配。
王兴亮数字通信原理(1)
王兴亮数字通信原理(1)
4. AM
AM信号可采用相干解调和包络检波两种方式。 AM 调制系统的性能分析与前面几个的分析方法相同, 在此无 需赘述。这里,仅就常用的简单的包络检波解调性能作一分析, 其分析模型如图2-14所示。
(2- 21)
或者
(2– 22)
王兴亮数字通信原理(1)
其中
V(t)的一维概率密度为瑞利分布,θ(t)的一维概率密度函数是平 均分布。ni(t)、nI(t)和nQ(t)的均值均为零,但平均功率不为零且 具有相同值,
(2- 23)
王兴亮数字通信原理(1)
当然,也有对应的输入信噪比, 其定义为
王兴亮数字通信原理(1)
为了便于衡量同类调制系统采用不同解调器时输入信噪 比的影响,还可用输出信噪比和输入信噪比的比值G来度量解 调器的抗噪声信能, 比值G称为调制制度增益, 定义为
(2- 25) 显然,调制制度增益越大,表明解调器的抗噪声性能越好。
王兴亮数字通信原理(1)
2.DSB调制系统的性能 DSB调制系统中的解调器是相干解调器,由乘法器和低通 滤波器组成。输入信号与噪声分别为
比较低。
王兴亮数字通信原理(1)
调制效率 定义为边带功率与总平均功率之比, 即
对于调制信号为单频余弦信号的情况 x(t)=Amcos(ωmt+θm),x2(t) =A2m/2,
(2 - 7)
“满调制”ma=1 时, 调制效率达到最大值, ηAM=1/3。
王兴亮数字通信原理(1)
2.1.2 抑制载波双边带调幅(DSB-SC) 将直流分量A0取掉,得到抑制载波的双边带信号,简称
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2π
i
1
( 2 i 1) Tb ( 2 i 1 ) Tb
π
π
H ( )e
j kT b
d
第 6 章 数字信号的基带传输
H ( )
3π Tb
π Tb
0
π Tb
2π Tb
(c)
单 极 性 (R Z)
t t
(d )
双 极 性 (R Z)
(e)
差分
t
( f)
AM I
t
图 6 – 1 数字基带信号码型 (a) 单极性(NRZ)码 ;(b) 双极性(NRZ)码;(c) 单极性(RZ)码; (d) 双极性(RZ)码; (e) 差分码;(f) 交替极性码(AMI); (g) 三阶高密度双极性码(HDB3);(h) 分相码; (i) 信号反转码(CMI)
y (t )
k
a
k
h ( t kT b ) n R ( t )
(6-11)
式中h(t)是H(ω)的傅氏反变换,是系统的冲击响应,可表示为
1 2
h (t )
H ( )e
j t
d
(6-12)
nR(t)是加性噪声n(t)通过接收滤波器后所产生的输出噪声。
第 6 章 数字信号的基带传输
2 2B
3 2B
t
图6 – 14 理想基带传输系统的H(ω)和h(t)
第 6 章 数字信号的基带传输
6.3.2 无码间串扰的等效特性 因为
h ( kT b )
2π
1
H ( )e
j kT b
d
把上式的积分区间用角频率间隔2π /Tb分割,如图 6 - 15所示, 则可得
h ( kT b )
“1”,则经推导可得随机脉冲的双边功率谱Px(ω )为
Px ( )
m
| f b [ pG 1 ( mf b ) (1 p ) G 2 ( mf b )] | ( f mf b )
2 2
f b p (1 p ) | G 1 ( f ) G 2 ( f ) |
时实际抽样判决值是本码元的值与几个邻近脉冲拖尾及加性噪 声的叠加。这种脉冲拖尾的重叠,并在接收端造成判决困难的 现象叫码间串扰(或码间干扰),下面先对数字基带系统进行数 学分析, 然后再讨论怎样的基带传输特性才会无码间串扰。
[d ] 第 6 章 数字信号的基带传输
k
1 (a ) O d ( t) (b ) O g T ( t) (c) O
(1) 码型中低频、 高频分量尽量少; (2) 码型中应包含定时信息, 以便定时提取; (3) 码型变换设备要简单可靠;
(4) 码型具有一定检错能力,若传输码型有一定的规律性,
则就可根据这一规律性来检测传输质量,以便做到自动监测
第 6 章 数字信号的基带传输
二 进 制代 码 (a ) (b ) 单极性 (NRZ) 双极性 (NRZ) 0 1 0 0 0 0 1 1 0 0 0 0 0 1 0 1 0 t t
非常准确,如果像图6-13(b) 这样的h(t)尾巴拖得太长,当定时
不准时,任一个码元都要对后面好几个码元产生串扰,或者 说后面任一个码元都要受到前面几个码元的串扰。因此,除了
要求h[(j-k)Tb+t0 ]=0以外,还要求h(t)适当衰减快一些,即尾
巴不要拖得太长。
第 6 章 数字信号的基带传输
性的码间串扰和噪声存在,使抽样判决电路在判决时, 可能判
对, 也可能判错。
第 6 章 数字信号的基带传输
4.2.3 码间串扰的消除
要消除码间串扰,从数学表示式(6 - 13)看,只要
a
k j
k
h [( j k ) T b t 0 ] 0
(6-14)
即可消除码间串扰,但ak是随机变化的,要想通过各项互相抵消
变换表的写入与修改方便,一般是采用EPROM(可改写的只读存
储器)来存放变换表。
第 6 章 数字信号的基带传输
2. 布线逻辑法 布线逻辑法又称组合逻辑法,它根据数字逻辑部件的要
求,按组合逻辑设计的方法来实现码型变换。图6 - 4是它的
原理方框图, 在某些情况下也可看成是用组合逻辑代替码表 存储法中的PROM。对于1B2B、2B3B等码,用此种方法比用码 表存储法简单。 图6 - 5给出了用布线逻辑法实现的CMI编/ 译码器及各点波形。
0
0
1
1
0
t
图 6 – 10 基 带 传 输 系 统 各 点 的 波 形
t
t
y ( t) (d ) O CP (e) O
[d k ]
t
t 1 0 0 0 1 0
( f) O t
第 6 章 数字信号的基带传输
Ts 1
Ts 0
Ts 1
Ts 1
抽样 点
t 符 号 间串 扰
图6 – 11 码间串扰示意图
x (t )
n
x n (t )
(6 - 1)
第 6 章 数字信号的基带传输
其中
g 1 ( t nT b ) x n (t ) g 2 ( t nT b )
以概率p出现 以概率(1-p)出现
(6 - 2)
Tb为随机脉冲周期,g1(t)、g2(t)分别表示二进制码“0”和
(6 – 3)
其中,G1(f)、G2(f)分别为g1(t)、g2(t)的傅氏变换,fb=1/Tb。
第 6 章 数字信号的基带传输
4.1.3 码型变换的基本方法
1. 码表存储法 码表存储法的方框图如图6 - 3所示。该方法是将二进制 码与所需线路码型的变换表(对应关系表)写入可编程只读存储 器(PROM)中,将待转变的码字作为地址码, 在数据线上即 可得到变换后的码。对于译码器,在地址线上输入编码码字, 则在数据线上输入还原了的二进制原码。实际应用时,考虑到
第 6 章 数字信号的基带传输
(g )
HDB
3
t
(h )
双相
t
( i)
M iller
t
( j)
CM I
t
(k)
DM I
t
图 6 – 1 数字基带信号码型 (a) 单极性(NRZ)码 ;(b) 双极性(NRZ)码;(c) 单极性(RZ)码; (d) 双极性(RZ)码; (e) 差分码;(f) 交替极性码(AMI); (g) 三阶高密度双极性码(HDB3);(h) 分相码; (i) 信号反转码(CMI)
第 6 章 数字信号的基带传输
第 6 章 数字信号的基带传输
6.1 数字基带信号
6.2 数字基带传输系统
6.3 无码间串扰的基带传输系统
6.4 眼图
6.5 时域均衡原理
6.6 部分响应技术
第 6 章 数字信号的基带传输
6.1 数字基带信号
4.1.1 数字基带信号的常用码型
传输码型的选择,主要考虑以下几点:
k
k
a j h (t 0 )
a
kk
k
h( j k ) T b t 0 ] n R ( jT b t 0 ) [
(6 - 13)
第 6 章 数字信号的基带传输
其中,第一项ajh(t0)是输出基带信号的第j个码元在抽样瞬间
jk
t=jTb+t0所取得的值,它是aj的依据;第二项 a k h [( j k )T b t 0 ]
第 6 章 数字信号的基带传输
6.2 数字基带传输系统
6.2.1 数字基带系统的基本组成
数字基带传输系统的基本框图如图6 - 9所示,它通常由脉 冲形成器、发送滤波器、信道、接收滤波器、抽样判决器与码 元再生器组成。
G T( ω ) 输入 脉冲 形成 器 d ( t) 发送 滤波 器 g T ( t) CP 定时 脉冲 噪 声 n ( t) 同步 提 取电 路 C(ω) 信道 GR( ω ) 接收 滤波 器 y ( t) 抽样 判决 码元 再生 输出
h ( t)
h ( t)
O
t0 (a )
t0 + T b
t
O
t0
t0 + T b (b )
t 0 + 2T b
t
图 6 – 13 理想的传输波形
第 6 章 数字信号的基带传输
6.3 无码间串扰的基带传输系统
(1) 基带信号经过传输后在抽样点上无码间串扰, 也即瞬 时抽样值应满足:
1( 或其它常数 h [( j k ) T b t 0 ] 0 ) j k
d (t )
k
a
k
( t kT b )
第 6 章 数字信号的基带传输
基带 信号 H(ω) d ( t) y( t) 抽样 判决
输出
图 6 – 12 基带传输系统简化图
第 6 章 数字信号的基带传输
其中ak 是第k个码元,对于二进制数字信号,ak 的取值为0、 1(单极性信号)或-1、+1(双极性信号)。由图6 - 12可以得到
(6 - 15)
j k
令k′=j-k, 并考虑到k′也为整数,可用k表示,
1 h ( kT b t 0 ) 0
k 0
(6 - 16)
k 0
第 6 章 数字信号的基带传输
(2) h(t)尾部衰减快。
从理论上讲,以上两条可以通过合理地选择信号的波形
和信道的特性达到。下面从研究理想基带传输系统出发,得
h (t ) 1 2
2B
H ( )e e