实验四步进电机控制接口实验
《单片机原理及接口技术》课程实验大纲

《单片机原理及接口技术》课程实验大纲课程名称:《单片机原理及接口技术》实验英文名称:《MCU principles and interface technologies》experiment课程性质:专业选修课程课程编号:0510085所属系部:机电工程学院总学时:14学时预备知识:电路、数字电子技术课程在教学计划中的地位作用:本课程是机械电子工程专业的一门重要专业选修课程。
目前单片机技术开发和应用水平已成为一个国家工业化发展水平的标志之一。
单片机原理及其应用已成为从事电子技术的工程技术人员必须掌握的基础理论和基本技能之一。
通过本课程的学习使学生实践上掌握单片计算机的基本组成、工作原理及常用接口技术,建立单片机系统整体概念,使学生具备单片机应用系统软、硬件开发的初步能力。
教学方式:理论与实践相结合教学的目的与要求:通过本课程的学习,使学生掌握单片机的硬件结构、MCS-51的指令系统、MCS-51汇编语言程序设计、MCS-51的中断系统、MCS-51的定时器/计数器、MCS-51的串行口、MCS-51单片机扩展存储器的设计、MCS-51扩展I/O接口的设计、MCS-51 与键盘、显示器的接口设计、MCS-51单片机与D/A转换器和A/D转换器的接口、MCS-51的功率接口、MCS-51的串行通信技术及其扩展接口。
进一步理解MCS-51单片机的开发装置、工作原理、编程方法,学会使用开发机进行程序。
课程教材:《单片机原理及接口技术》蔡美琴主编高等教育出版社参考书目:1.《单片机程序设计基础》周航慈主编北京航天航空大学出版社2. 《单片机原理及其接口技术》胡汉才主编清华大学出版社编写日期:2012年6月制定课程内容及学时分配:发光二极管显示各相状态。
要求:掌握步进电机控制系统的硬件设计方法;熟悉步进电机驱动程序的设计与调试,提高单片机应用系统设计和调试的能力。
正确连接电路,编写程序,调试运行。
实验一P1口亮灯实验一、实验目的1.学习P1口的使用方法;2.学习延时子程序的编写。
机电传动控制实验报告

机电传动控制实验报告
本次实验主要学习了机电传动控制的基础知识和控制方法,通过实际的硬件实验,进一步加深了对于机电传动控制的了解。
实验一:单向行程控制系统
通过本次实验,我们学习了单向行程控制系统的构成和工作原理。
通过按下按钮控制气缸的伸缩,实现了单向行程的控制。
实验二:双向行程控制系统
通过本次实验,我们学习了双向行程控制系统的构成和工作原理。
通过按下按钮控制气缸的伸缩,实现了双向行程的控制。
实验三:速度控制系统
通过本次实验,我们学习了速度控制系统的构成和工作原理。
通过按下按钮控制电机的正反转,结合调节电位器实现了电机的速度控制。
实验四:位置控制系统
通过本次实验,我们学习了位置控制系统的构成和工作原理。
通过按下按钮控制步进电机的转动步数,实现了位置控制。
实验五:机械机构控制系统
通过本次实验,我们学习了机械机构控制系统的构成和工作原
理。
通过按下按钮控制三个气缸的伸缩和机械瓣的运动,实现了机械机构的控制。
实验总结:
通过本次实验,我们掌握了机电传动控制的基础知识和控制方法,了解了不同类型控制系统的工作原理和实现方式,同时也加深了对于控制硬件的认识。
在实验过程中,我们不仅解决了各种控制问题,还加强了团队协作和沟通能力,为我们未来的研究和实践打下了坚实的基础。
两相四线步进电机
两相四线励磁式步进电机工作原理本章将介绍在嵌入式平台UP-NETARM2410-S中步进电机的实现;步进电机在各个领域诸如机器人、智能控制、工业控制等方面都有着广泛的应用空间,本章着重介绍步进电机的工作原理及编程实现步进电机驱动的方法,主要内容如下:l 步进电机的概述l 步进电机的工作原理l 和微处理器的总线连接方式l 驱动程序的编程l Linux 下用软件的方法实现步进电机的脉冲分配,用软件的方法代替硬件的脉冲分配器1.步进电机概述步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机;单相步进电动机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动;多相步进电动机有多相方波脉冲驱动,用途很广;使用多相步进电动机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电动机各相绕组;每输入一个脉冲到脉冲分配器,电动机各相的通电状态就发生变化,转子会转过一定的角度称为步距角;正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响;由于步进电动机能直接接收数字量的输入,所以特别适合于微机控制;步进电机的特性步进电机转动使用的是脉冲信号,而脉冲是数字信号,这恰是计算机所擅长处理的数据类型;从20世纪80年代开始开发出了专用的IC驱动电路,今天,在打印机、磁盘器等的OA装置的位置控制中,步进电机都是不可缺少的组成部分之一;总体上说,步进电机有如下优点:1.不需要反馈,控制简单;2.与微机的连接、速度控制启动、停止和反转及驱动电路的设计比较简单; 3.没有角累积误差;4.停止时也可保持转距;5.没有转向器等机械部分,不需要保养,故造价较低;6.即使没有传感器,也能精确定位;7.根椐给定的脉冲周期,能够以任意速度转__________动;但是,这种电机也有自身的缺点;8.难以获得较大的转矩9、不宜用作高速转动10.在体积重量方面没有优势,能源利用率低;11.超过负载时会破坏同步,速工作时会发出振动和噪声;步进电机的种类目前常用的步进电机有三类:1、反应式步进电动机VR;采用高导磁材料构成齿状转子和定子,其结构简单,生产成本低,步距角可以做的相当小,但动态性能相对较差;2、永磁式步进电动机PM;转子采用多磁极的圆筒形的永磁铁,在其外侧配置齿状定子;用转子和定子之间的吸引和排斥力产生转动,转动步的角度一般是;它的出力大,动态性能好;但步距角一般比较大;3、混合步进电动机HB;这是PM 和VR的复合产品,其转子采用齿状的稀土永磁材料,定子则为齿状的突起结构;此类电机综合了反应式和永磁式两者的优点,步距角小, 出力大,动态性能好,是性能较好的一类步进电动机,在计算机相关的设备中多用此类电机;2、步进电机的工作原理现以反应式三相步进电机为例说明其工作原理;三相步进电机的定子铁心上有六个形状相同的大齿,相邻两个大齿之间的夹角为60 度;每个大齿上都套有一个线圈,径向相对的两个线圈串联起来成为一相绕组;各个大齿的内表面上又有若干个均匀分布的小齿;转子是一个圆柱形铁心,外表面上圆周方向均匀的布满了小齿;转子小齿的齿距是和定子相同的;设计时应使转子齿数能被二整除;但某一相绕组通电,而转子可自由旋转时,该相两个大齿下的各个小齿将吸引相近的转子小齿,使电动机转动到转子小齿与该相定子小齿对齐的位置,而其它两相的各个大齿下的小齿必定和转子的小齿分别错开正负1/3 的齿距,形成“齿错位”,从而形成电磁引力使电动机连续的____苔K_转动下去;和反应式步进电动机不同,永磁式步进电动机的绕组电流要求正,反向流动,故驱动电路一般要做成双极性驱动;混合式步进电动机的绕组电流也要求正,反向流动,故驱动电路通常也要做成双极性;、步进电机的励磁方式步进电机有2相、4相和5相电机;在4相电机中有4组线圈,若电流按顺序通过线圈则使电机产生转动;2相电机中有2 组线圈;从图可以发现,在各线圈中引出中间端子,因此若以中间端子为基准即可实现4相,称这4为A、B、C、D 的励磁相;本实验使用的就是这种方式的4相电机,而励磁方式中有1 相单向励磁、2 相双向励磁和1-2 相单-双向励磁方式;此外,如果转动的方向不正确,可以交替1、2端子或3、4号端子1. 1相励磁方式按ABCD的顺序总是仅有一个励磁相有电流通过,因此,对应1个脉冲信号电机只会转动一步,这使电机只能产生很小的转矩并会产生振动,故很少使用;A B C DT1 1 0 0 0T2 0 1 0 0T3 0 0 1 0T4 0 0 0 1图-T4表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有2. 2相励磁方式按AB、BC、CD、DA的方式总是只有2相励磁,通过的电流是1相励磁时通过电流的2倍,转矩也是1相励磁的2 倍;此时电机的振动较小且应答频率升高,目前仍广泛使用此种方式;A B C DT1 1 1 0 0T2 0 1 1 0T3 0 0 1 1T4 1 0 0 1图-T4表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有脉冲3. 1-2相励磁方式即实验中所有的励磁方式,它按A、AB、B、BC、C、CD、D、DA的顺序交替进行线圈的励磁;与前述的2个线圈励磁方式相比,电机的转速是原来的1/2,应答频率范围变为原来的2倍;转子以滑动的方式转动;A B C DT1 1 0 0 0T2 1 1 0 0T3 0 1 0 0T4 0 1 1 0T5 0 0 1 0T6 0 0 1 1T7 0 0 0 1T8 1 0 0 1图-T8表示脉冲周期;ABCD表示电机的各相,1表示此时有一个脉冲,0表示没有脉冲3.与微处理器的连接方式步进电机并不是直接与CPU相连的;由于开发板上外部设备很多,各功能模块与微处理器的连接方式有专用线路,局部总线与扩展总线;局部总线与扩展总线局部总线与微处理器直接相连,扩展总线通过一个总线控制器74LVCH6245与局部总线相连;从CPU 出来的数据、地址、读写控制等信号构成局部总线;NAND FLASH、SDRAM和网卡芯片AX88796 直接挂在局部总线上的;局部总线经过四片74LVCH16245 驱动后作为扩展总线引到其他外设以及168Pin 扩展槽;由于数据线是双向的,所以16245芯片必须有方向控制信号,这里采用经过隔离后的写控制信号OE 作为数据线所在16245 芯片的方向控制线;当OE 有效时16245 芯片把扩展总线上的数据传输到局部总线上;当OE无效时反之;另外,必须注意,当系统对局部总线上的芯片读数据时OE 一样会起作用,这样就必须对局部总线和扩展总线进行总线仲裁,这里是外设所具有的四个片选信号nGCS1、3、4、5 用74HC21 相与后作为数据线所在的16245 芯片的输出使能控制线,只有当系统对扩展总线读操作,也就是上述四个片选之一有效时,16245 才能对局部总线输出数据,否则无论OE 如何都呈现高阻态;如下图:注:LDATA表示局部总线的数据线;DATA表示扩展总线的数据线;74LVCH16425芯片共有四块,限于篇幅仅举一片为例,其它三片芯片,一片用于数据线的低位连接,两片用于地址线的连接;注:由于片选线使用的负逻辑电平有效,所有此处用的是与门芯片74HC573扩展总线连接在芯片74HC573上,扩展总线的DATA0-DATA7分别接在74HC573的八个数据输入端上;74HC573芯片是由8个三态门组成的寄存器,它起到暂时保存信息和隔离总线的作用;芯片的输出I\O0—I\O3用于D\A数模转换,I\O4—I\O7用于步进电机的控制;描述:这个芯片采用的是八进位的D触发器,它可以驱动电容式或电阻式的负载;因此它特别适合应用于缓冲寄存器、IO端口、双向的总线控制器、和操作寄存器;当寄存器的使能端LE为高电平时,Q输出端和________D输入端一一对应;当LE为低电平时,输出端管脚Q输出的是寄存器中已被设定的值;当一个能开启缓冲功能的负逻辑管脚OE为0时,无论是在正常逻辑状态还是在高阻抗状态下,都能放置八位的输出数据;在高阻抗状态下;输出并没有负载或者进行控制总线;高阻态和改进的总线驱动可以在不拉起元件的情况下控制总线传输;OE端并不影响寄存器内部的操作;当输出端呈高阻状态时旧的数据可以被保存或者新的数据进行输入;步进电机模块的驱动电路74HC573芯片的输出I\O4—I\O7用于用来驱动步进电机的转动;数据线要首先接在步进电机模块的一个接口上;接口对信号进行放大,使之能够驱动步进电机;放大后的信号就可以直接的来使步进电路进行工作了;、开发板中的步进电机本开发板中使用的步进电机为四相步进电机;转子小齿数为64;系统中采用四路I/O 进行并行控制,ARM 控制器直接发出多相脉冲信号,在通过功率放大后,进入步进电机的各相绕组;这样就不再需要脉冲分配器;脉冲分配器的功能可以由纯软件的方法实现如上图所示;四相步距电机的控制方法有四相单四拍,四相单、双八拍和四相双四拍三种控制方式;步距角的计算公式为:θb=3600/mC k其中:m 为相数,控制方法是四相单四拍和四相双四拍时C 为1,控制方法是四相单、双八拍时C 为2,Z k 为转子小齿数;本系统中采用的是四相单、双八拍控制方法,所以步距角为360°/512;但步进电机经过一个1/8 的减速器引出,实际的步距角应为360°/512/8;开发平台中使用EXI/O 的高四位控制四相步进电机的四个相;按照四相单、双八拍控制方法,电机正转时的控制顺序为A→AB→B→BC→C→CD→D →DA;EXI/O 的高四位的值参见下表:十六进制二进制通电状态1H 0001 A3H 0011 AB2H 0010 B6H 0110 BC4H 0100 CCH 1100 CD8H 1000 D9H 1001 DA表5. 电机正转时,EXIO的高四位的值反转时,只要将控制信号按相反的顺序给出即可;可以通过宏SETEXIOBITMASKbit,mask来设置扩展I/O 口,其中mask 参数为0xf0;本实验使作的是1-2相励磁方式,还可以使用1相励磁方式和2相励磁方式;1相励磁方式的顺序是ABCD,因此只要设置数组char stepdata={0x10,0x20,0x40,0x80} 即可2相励磁方式的顺序是AB,BC,CD,DA, 因此只要设置数组char stepdata={0x30,0x60,0xc0,0x90} 即可要实现电机的反转,只需将上面数组的值按相反的顺序排列即可4、驱动程序的编程驱动程序采用C语言进行编程,下面是驱动程序中几个重要的函数;static int do_stepmotor_runchar phase //通过调用这个函数使步进电机转起来{unsigned int bak; //变量bak用于存放从寄存器中读出的值bak = readws3c2410_exio_base; //调用内核函数将基地址为s3c2410_exio_base寄存//器的值读出并放在bak中DPRINTK_STEP"s3c2410_exio_base content is %x\n", bak; //调试输出语句tiny_delay5; //延时函数,有延时功能bitops_mask_bitphase, 0xf0, &bak;//清除4-8位然后再设置phase传进来的位也是4-8位DPRINTK_STEP"s3c2410_exio_base content is%x\n", bak; //调试输出语句tiny_delay5;writewbak, s3c2410_exio_base; //调用内核函数将bak的值写入相应的寄存器中bak = readws3c2410_exio_base; //再次将寄存器的值读出DPRINTK_STEP"s3c2410_exio_base content is %x\n", bak;//利用调试语句再次将修改后的寄存器中的值输出,以验证其正确性tiny_delay5;DPRINTK_STEP"\n";return 0;}驱动程序主要通过上面这个函数来使步进电机转动;控制电机的是一个寄存器地址是s3c2410_exio_base=0x08000100,只要给它适当的值电机就可以运动起来;这个函数通过传递变量phase从应用程序获得数据;然后使用函数readw把寄存器的值就读出并送给bak;通过函数bitops_mask_bit修改bak的值;最后由writew写回到寄存器中;5、应用程序的编程1、步进电机模块步进电机模块和DA 模块是使用Bank1 地址空间扩展出来的IO口;共同使用驱动;在驱动程序中,与步进电机相关的主要在函数s3c2410_exio_ioctl:2、对应的应用源程序include <>include <>include <>include <sys/>define STEPMOTOR_IOCTRL_PHASE 0x13static int step_fd = -1;char STEP_DEV="/dev/exio/0raw"; //定义一个指针指向步进电机的驱动程序/ A, AB, B, BC, C CD, D, DA /char stepdata={0x10,0x30,0x20,0x60,0x40,0xc0,0x80,0x90};//各个相位对应的值void Delayint t //延时函数{int i;for;t>0;t--fori=0;i<400;i++;}//int mainint argc, char argv{int i = 0;ifstep_fd=openSTEP_DEV, O_WRONLY<0{printf"Error opening /dev/exio/0raw device\n";return 1;}/打开设备的驱动程序,由于LINUX把所有的设备都模拟成文件;step_fd=openSTEP_DEV,0_WRONLY实际调用的函数为:static int s3c2410_exio_openstruct inode inode, struct file filp //驱动程序中的设备打开程序/for ;; {for i=0; i<sizeofstepdata/sizeofstepdata0; i++ {ioctlstep_fd, STEPMOTOR_IOCTRL_PHASE,stepdatai;}/程序进入一个死循环,这样可以使电机在没有人为停止的状况下,一直的转动下去;第二层for语句循环一次即电机转动一周;函数ioctl对应函数s3c2410_exio_ioctl而这个函数最终将调用函数do_stepmotor_runchararg;使步进电机转动起来;/printf"Delay100\n";Delay100;}closestep_fd; //程序结束时关闭设备printf"Step motor start running\n";return 0;}__。
步进电机转速与脉冲频率的关系
步进电机转速与脉冲频率的关系一、引言步进电机是一种被广泛应用的电机,其电信号输入方式为脉冲信号。
脉冲的频率决定了步进电机的转速。
本文将探讨步进电机转速与脉冲频率的关系,阐述其原理及重要性。
二、原理步进电机是通过每次输入一个脉冲信号使其转动一步的电机。
脉冲信号的频率越高,电机转动的速度越快。
电机的转速与每秒钟输入的脉冲数成正比关系,即:转速=每秒钟输入的脉冲数*步距角/60。
步进电机被广泛应用于自动控制、数码打印、造纸机械、织布机械、印刷机械、数控机床、绕线机、制药机械、纺织机械、包装机械、医药包装、舞台灯光及影视器材等领域。
三、实验为了更直观地展示步进电机转速与脉冲频率的关系,我们进行了以下实验。
实验器材:1. 步进电机 M42SP-52. 步进电机驱动器 DM5423. 电源4. 信号发生器 GSG-5000实验步骤:1. 将步进电机连接到步进电机驱动器上,并连接电源。
2. 在信号发生器上设置脉冲频率为1000Hz。
3. 将信号发生器连接到步进电机驱动器的脉冲输入口上。
4. 点击步进电机驱动器的“运行”按钮,观察步进电机的转速。
5. 重复以上步骤,将脉冲频率分别设置为500Hz、200Hz、100Hz、50Hz。
观察步进电机的转速变化。
实验结果:当脉冲频率分别为1000Hz、500Hz、200Hz、100Hz、50Hz时,步进电机的转速分别为 150rpm、75rpm、30rpm、15rpm 和 7.5rpm。
四、结果分析通过实验可以看出,步进电机的转速与脉冲频率成正比关系。
脉冲的频率越高,每秒钟输入的脉冲数越多,步进电机转动的速度越快。
因此,在实际应用中,我们需要根据需要调整脉冲的频率,以实现需要的转速。
五、结论步进电机是一种重要的电机,在自动控制、机械制造等行业中有着广泛的应用。
步进电机转速与脉冲频率成正比关系,因此,我们需要根据需要调整脉冲的频率,以达到需要的转速。
此外,步进电机电路复杂,需要注意电气安全等问题。
实验五 步进电机单轴定位控制实验
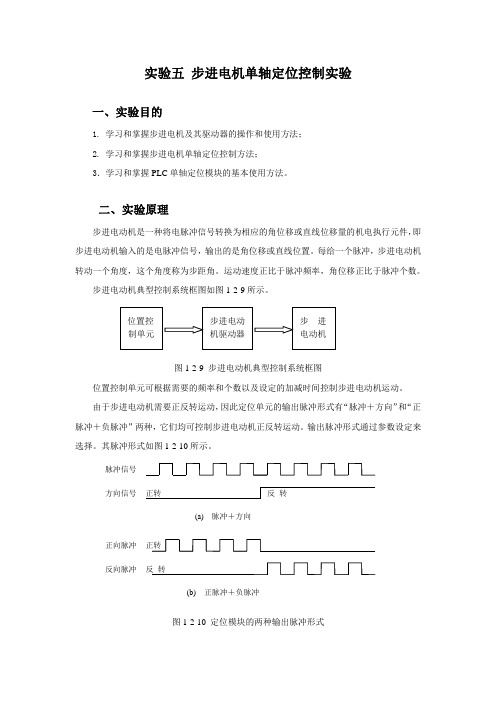
方向信号 (a) 脉冲+方向 (b) 正脉冲+负脉冲 实验五 步进电机单轴定位控制实验一、实验目的1. 学习和掌握步进电机及其驱动器的操作和使用方法;2. 学习和掌握步进电机单轴定位控制方法;3.学习和掌握PLC 单轴定位模块的基本使用方法。
二、实验原理步进电动机是一种将电脉冲信号转换为相应的角位移或直线位移量的机电执行元件,即步进电动机输入的是电脉冲信号,输出的是角位移或直线位置。
每给一个脉冲,步进电动机转动一个角度,这个角度称为步距角。
运动速度正比于脉冲频率,角位移正比于脉冲个数。
步进电动机典型控制系统框图如图1-2-9所示。
图1-2-9 步进电动机典型控制系统框图位置控制单元可根据需要的频率和个数以及设定的加减时间控制步进电动机运动。
由于步进电动机需要正反转运动,因此定位单元的输出脉冲形式有“脉冲+方向”和“正脉冲+负脉冲”两种,它们均可控制步进电动机正反转运动。
输出脉冲形式通过参数设定来选择。
其脉冲形式如图1-2-10所示。
图1-2-10 定位模块的两种输出脉冲形式频 率 (HZ ) 脉冲数(PLS ) f 1S 2 S 3S 1由于步进电动机的电磁惯性和所驱动负载的机械惯性,速度不能突变,因此定位模块要控制升降频过程。
步进电机升、降频过程如图1-2-11。
一般情况下,S 2=S 3。
图 1-2-11 步进电机升、降频示意图其中:f 1——设定的运行频率,应小于步进电动机的最高频率;S 1——设定的总脉冲个数;S 2——升频过程中脉冲个数,由加速时间和运行频率确定;S 3——降频过程中脉冲个数,由减速时间和运行频率确定。
步进电动机驱动器将位置定位模块的输出脉冲信号进行分配并放大后驱动步进电动机的各相绕组,依次通电而旋转。
驱动器也可接受两种不同形式的脉冲信号,通过开关来选择,定位模块和驱动器的脉冲形式要相同。
另外,为了提高步进电动机的低频性能,驱动器一般具有细分功能,多个脉冲步进电动机转动一步,细分系数一般为1、2、4、8、16、32等几种,通过拨码开关来设定。
电机深度解析实验报告(3篇)

第1篇一、实验目的通过对不同类型电机的原理、结构、性能和应用进行深度解析,了解电机的工作原理、技术特点以及在实际应用中的优缺点,为电机选型和应用提供理论依据。
二、实验内容1. 直流电机(1)原理:直流电机利用电磁感应原理,将电能转换为机械能。
当电流通过线圈时,在磁场中产生力矩,使线圈转动。
(2)结构:直流电机主要由定子、转子、电刷、换向器和端盖等组成。
(3)性能:直流电机具有调速范围宽、启动转矩大、响应速度快等优点。
(4)应用:广泛应用于汽车、船舶、家用电器、工业生产等领域。
2. 交流异步电机(1)原理:交流异步电机利用电磁感应原理,将电能转换为机械能。
定子产生旋转磁场,转子在磁场中受到力矩作用而转动。
(2)结构:交流异步电机主要由定子、转子、轴承、端盖等组成。
(3)性能:交流异步电机具有结构简单、成本低、运行可靠、维护方便等优点。
(4)应用:广泛应用于工业生产、家用电器、农业机械等领域。
3. 交流同步电机(1)原理:交流同步电机利用电磁感应原理,将电能转换为机械能。
定子产生旋转磁场,转子在磁场中受到力矩作用而转动,转速与电源频率同步。
(2)结构:交流同步电机主要由定子、转子、轴承、端盖等组成。
(3)性能:交流同步电机具有精度高、稳定性好、功率因数高、效率高、调速范围宽等优点。
(4)应用:广泛应用于发电、输电、大型机械、精密仪器等领域。
4. 步进电机(1)原理:步进电机将脉冲信号转换为机械运动,每输入一个脉冲信号,电机转动一个步距角。
(2)结构:步进电机主要由定子、转子、线圈、磁体等组成。
(3)性能:步进电机具有定位精度高、响应速度快、控制简单等优点。
(4)应用:广泛应用于数控机床、自动化设备、机器人、精密仪器等领域。
5. 扁线电机(1)原理:扁线电机采用扁线绕制技术,提高槽满率,减小集肤效应,降低损耗。
(2)结构:扁线电机主要由定子、转子、绕组、冷却系统等组成。
(3)性能:扁线电机具有高效、节能、低噪音等优点。
PLC控制直流电机实验
实验四直流电机PLC控制实验一、实验目的1.掌握PLC的基本工作原理2.掌握PID控制原理3.掌握PLC控制直流电机方法4.掌握直流电机的调速方法二、实验器材1.计算机控制技术实验装置一台2.CP1H编程电缆一条3.PC机一台三、实验内容根据输入,实现PLC对直流电机的调速PID控制。
1、输入功能(1)功能操作,按钮11.1、按钮1按下一次,显示SV(设定点值)。
1.2、按钮1按下两次,显示速度设定值。
1.3、按钮1按下三次,设定P值,显示。
1.4、按钮1按下四次,显示P值。
1.5、按钮1按下五次,设定I值,显示。
1.6、按钮1按下六次,显示I值。
1.7、按钮1按下七次,设定D值,显示。
1.8、按钮1按下八次,显示D值。
1.9、按钮1按下九次,显示At(PID 自调整增益)1.10、按钮1按下十次,自整定显示1.11、按钮1按下十一次,复位(2)增加按钮2,数值增加(3)减小按钮3,数值减小(4)确定按钮4,操作确定2、PWM脉冲输出,接输出101.00。
3、直流电机测速,光耦,接高速脉冲输入。
4、LED显示,根据按钮输入,显示设定值/测量值/加减量。
四、实验原理1.直流无刷电机PWM调速原理PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压。
PWM的占空比决定输出到直流电机的平均电压,所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节。
在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:(1)使用PWM信号,控制三极管的导通时间,导通的时间越长,那么做功的时间越长,电机的转速就越高。
步进电机细分控制代码_解释说明_
步进电机细分控制代码解释说明1. 引言1.1 概述步进电机是一种常用的电动机类型,它通过对定角度进行分步操控来实现精准的位置控制。
细分控制是指通过改变驱动脉冲信号的频率和相位,使步进电机可以实现更高的转动精度和速度。
在传统情况下,步进电机通常采用全步进驱动模式,即每接收到一个脉冲信号就前进一个整步(通常为1.8°或0.9°)。
然而,在一些特定应用场景中,需要更高精度和更平滑的运动来满足要求。
因此,细分控制技术应运而生。
本文将详细介绍步进电机细分控制代码的原理和实现方法,并讨论其在工业领域中的优势和应用范围。
通过实验验证和案例分析,我们将验证并展示细分控制对步进电机性能提升的效果。
1.2 文章结构本文共分为以下几个部分:引言、正文、优势和应用范围、实验验证与案例分析以及结论与展望。
在引言部分,我们将首先概述步进电机工作原理,并介绍细分控制的概念与原理。
然后,我们将详细讨论细分控制代码的实现方法。
1.3 目的本文旨在向读者介绍步进电机细分控制代码的背景和原理,并提供实际应用方面的案例分析。
通过深入了解步进电机细分控制技术,读者将能够更好地理解其优势以及在工业领域中的应用范围。
同时,本文也旨在激发读者对于步进电机细分控制技术未来发展方向和挑战的思考。
2. 正文:2.1 步进电机工作原理步进电机是一种将电脉冲信号转化为机械转动的电动执行器。
其工作原理基于电磁学和力学原理,通过定向的磁场引起旋转运动。
步进电机通常由定子和转子组成,其中定子由多个绕组构成,而转子则包含一个或多个磁节(也称为极对)。
在正常工作情况下,步进电机引入一系列脉冲信号来驱动定子绕组产生磁场。
这些脉冲信号使得定子的磁场按特定顺序不断变化,从而吸引或排斥磁节,推动转子沿着预定方向旋转。
每当一个脉冲信号输入时,步进电机会以固定的角度(步距角)进行旋转。
2.2 细分控制概念与原理细分控制是指通过改变每个脉冲信号的时间长度、幅值或次数,使得步进电机能够实现更精确的旋转运动。
步进电机测速实验报告
步进电机测速实验报告步进电机是一种特殊的电动机,它的转动步进角度是固定的。
步进电机广泛应用于各种领域,例如打印机、机床和机器人等。
因为步进电机的步进角度与控制信号的脉冲数是线性相关的,因此步进电机的速度控制通常是通过控制脉冲数来实现的。
本实验旨在通过实际测速来验证步进电机速度与脉冲数之间的关系。
二、实验原理步进电机的角速度与脉冲频率之间存在一定的对应关系,通常可以使用脉冲频率来控制步进电机的转动速度。
步进电机的转速可以通过计算单位时间内的脉冲数来间接得到。
实验设备:步进电机、恒流驱动器、信号发生器、数显频率计、示波器等。
步进电机的测速实验流程如下:1. 连接步进电机与恒流驱动器,保证电机正常工作。
2. 设置信号发生器的频率、占空比以及信号发生模式,保证输出脉冲信号的稳定性和精确性。
3. 将信号发生器的输出信号连接到恒流驱动器的脉冲输入端,通过改变脉冲频率来控制步进电机的转速。
4. 使用示波器观察步进电机的转动状态,确定电机的运动是否正常。
5. 连接数显频率计到电机驱动器的输出端,设置合适的测量范围和触发模式,测量电机的转速。
6. 记录测量数据,通过分析数据得出步进电机转速与脉冲频率的对应关系。
三、实验过程1. 搭建实验电路,并接通电源,保证电机和仪器处于正常工作状态。
2. 设置信号发生器的频率和占空比,将输出信号接入恒流驱动器的脉冲输入端。
3. 观察步进电机的转动状态,调整信号发生器的频率,使电机转动稳定。
4. 连接数显频率计到电机驱动器的输出端,设置适当的量程和触发模式。
5. 测量步进电机的转速,在不同的频率下进行多次测量,得到数据。
6. 统计测量数据,分析步进电机转速与脉冲频率之间的关系。
四、实验结果根据实验测量数据,将步进电机的转速与信号发生器的频率进行对比,得到如下关系:脉冲频率(f) 转速(转/分钟)100 300200 600300 900400 1200500 1500五、实验分析通过实验数据的分析可以得到步进电机转速与信号发生器脉冲频率之间存在线性关系。
(完整版)步进电机驱动原理
步进电动机基本原理实验(一)实验目的1. 了解步进电动机的基本结构和工作原理;2. 掌握步进电机驱动程序的设计方法;3. 掌握步进电动机速度调节、方向控制技术;4. 了解步进电动机的各项基本参数对电机运行的影响;5. 熟悉DRLab实验室的操作方法(二)实验仪器设备1. DRVI/DRLink 可重组虚拟仪器和计算机控制平台2. 电机运动控制系统3. 计算机4. 打印机(三)实验原理•当某一相绕阻通电时,对应的磁极产生磁场,并与转子形成磁路,这时,如果定子和转子的小齿没有对齐,在磁场的作用下,由于磁通具有力图走磁阻最小路径的特点,转子将转动一定的角度,使转子与定子的齿相互对齐,由此可见,错齿是促使电机旋转的原因。
•步进电动机又称为脉冲电机,它能将电脉冲转换为相应的角位直线位移。
步进电动机定子绕组的通电状态每改变一次,转子转一个确定的角度,为步进电动机的步距角a。
它与定子绕组的相数m转子的齿数Z、通电方式k 有关,可用下式表示:a- 360^/mkz•从图1所示,进步电机以四相单四拍方式正转时,按2B—C-D次序通电。
步进电动机定子绕组通电状态的改变速度越快,其转子旋转的速度越快,即通电状态的变化频率越高,转子的转速越高图1进步电机四相单四拍式绕组通电方式•四相步进电动机以四相单四拍(a)、四相双四拍(b)、四相八拍(c)方式工作时的脉冲分配表a 四相单四柏脈沖分配走b 四相很四柏肚沖分配St22的23 33*?1“2 3 0“N 也 如1*3加N+3*1如22a 卢N41 2 JCM2 zN4 5』3卜2I P附222N+ 7.2Ck1#N+iQ-'¥B 貴丽1.、O»'N+1*U1N 乜i*5aL P0/2上2的型号为42BYGH10,为4相电机。
如图2所示:(四)实验内容及步骤A. 步进电机运行速度调节实验:运行方式选择“连续驱动”,驱动类型选择“四相单四拍”方式,脉冲间隔选择范围3〜15ms (由于步进电机的设计原因,当脉冲间隔为2ms时,四相单四拍方式不能正常工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
湖北科技学院计算机科学与技术学院
《微机接口技术》实验报告
学号: 124221031 姓名: 李亮亮
实验题目: 步进电机控制接口实验报告
指导老师: 范建军
实验日期: 2014.12.12
一、实验目的
通过步进电机控制实验,学习并行接口电路及其控制程序的设计原理与方法。
二、实验内容
基本实验 四相步进电机,以双八拍方式运行。按开关SW1启动;按开关SW2,停止。
三、实验要求
利用MFID实验平台和步进电机驱动模块板进行硬件连接,利用MFIDE-6集成开发环境
进行步进电机软件控制程序的设计、调试,直到使步进电机正常运行。
四、实验原理
1.步进电机驱动模块板电路原理如图2.1.2所示。模块板上包括接口的对象永磁式四
相步进电机和驱动电路达林顿管TIP,保护电路74LS373,相序指示灯以及开关SW1和SW
2
等。
2.步进电机接口设计原理与方法的详细阐述,参考《微型计算机接口技术及应用》教
材第7.3节(P146~151)。
图2.1.2 步进电机驱动模块电路原理框图
五、实验资源配置
1.电源:机内供电,将平台的电源开关拔到“内”的位置上,并将模块电源中并口电源
接通
2.电缆线:采用单线/20芯扁平线
3.开关:T区的SW1、SW2和SW3可以配置为用来控制步进电机的运行方向、速度和
启动/停止
4.本实验所涉及的模块:F(8255模块),P(步进电机),T(按键开关),L(跳线)
四个模块
5.I/O端口地址:8255的4个端口地址为300H~303H。其中A口=300H,B口=301H,
C口=302H,命令口=303H
6.软件资源:MFID-6集成开发环境软件提供了丰富的汇编语言和C/C++语言程序开发
工具
六、实验的硬件连接与软件编程
1. 硬件连线:
F区 P区
PA0
A相
PA2
B相
PA4
C相
PA6
D相
PC4
OE#74LS373开关
2.步进电机接口控制参考程序
①流程图 如图2.1.3所示。
实验上位机界面如下图:
图2.1.3 步进电机程序流程图
8255初始化
关74LS373
查SW1按下?
相序表指针→SI
循环次数→CX
查SW2按下?
相序代码→PA 开74LS373 延时 相序表指针SI+1` 循环次数CX-1 关74LS373
已到8次?
N
N
Y
Y
N
Y
开始
结束
实验代码:
;*------------------------------------------------------*
;* StepM.asm(步进电机控制接口实验) *
;* 步进电机控制程序 Source File *
;* Copyright (c) 2001 by HUST *
;* Modify Date 2005.4.10 *
;*------------------------------------------------------*
code segment
assume cs:code,ds:code
org 100h
start:jmp begin
psta db 05h,15h,14h,54h,50h,51h,41h,45h ;相序表
message db 'Press sw2 to start !' ;系统提示
db 0dh,0ah
db 'If you want to quit,press sw1!'
db 0dh,0ah,'$'
begin: mov ax,cs
mov ds,ax
mov ah,09h ;显示提示信息
mov dx,seg message
mov ds,dx
mov dx,offset message
int 21h
mov dx,303h ;初始化8255A
mov al,81h
out dx,al
mov al,09h ;置PC4=1关闭74LS373
out dx,al
L: mov dx,302h ;查SW2按下?(PC1=0 )
in al,dx
and al,02h ;未按下,等待
jnz L
mov dx,303h ;置PC4=0,打开74LS37
mov al,08h
out dx,al
reload: mov si,offset psta ;设相序表指针
mov cx,8 ;设8拍循环次数
lop: mov dx,302h ;查SW1按下?(PC0=0 ?)
in al,dx
and al,01h
jz quit ;已按下,退出
mov al,[si] ;未按下,送相序代码到PA口
mov dx,300h
out dx,al
mov di,0afh
mov bx,0ffffh ;延时
delay: dec bx
jnz delay
dec di
jnz delay
inc si ;相序表指针+1
dec cx ;循环次数-1
jnz lop ;未到8次,继续
jmp reload ;已到8次,重新赋值
quit: mov dx,303h ;置PC4=1,关闭74LS373
mov al,09
out dx,al
mov ah,4ch ;程序退出
int 21h
code ends
end start