两种外辐射源雷达跟踪算法性能分析
外辐射源雷达概述
1 研究背景与意义雷达面临的四大挑战:(1)隐身目标的威胁隐身飞机、隐身导弹和隐身舰艇和无人机的出现使得雷达散射截面积成百上千倍的减小,增加了雷达发现目标的难度。
(2)低空与超低空目标的威胁战术导弹和战略巡航导弹等低空、超低空目标的入侵也给雷达探测带来了重大挑战。
(3)反辐射摧毁的威胁反辐射导弹利用敌方雷达的电磁辐射进行制导并将其摧毁,是电子对抗中对雷达硬杀伤最有效的武器。
为应对日益恶化的外部电磁环境,雷达往往需要发射更大的功率以达到同样的探测性能,从而增加了被发现甚至被摧毁的风险。
(4)强电子干扰传统雷达一般采用收发共置的布站方式,其发射电磁波一旦被敌方发现和定位,就极容易被干扰,进而丧失整个武器战争系统的重要信息来源。
外辐射源(无源)雷达因能克服上述问题而引起人们的广泛关注。
外辐射源雷达分为两大类:第一类是基于目标的红外辐射或自身发射的电磁波来对其探测,目标发射的电磁波主要来源于雷达、应答机、通信电台、导航仪、有源干扰机等通讯电子设备;第二类是利用广播信号、电视信号、手机信号、卫星导航信号等非合作照射源来探测目标。
当目标静默(不发射电磁波)时,利用第一类外辐射源雷达通过电磁波来探测目标就无法实现。
对于第二类外辐射源雷达,即使目标静默,也能探测到目标,因此对此类外辐射源雷达的研究成为热点。
外辐射源雷达的优势:(1)反隐身特性隐身目标一般只大幅度减少鼻锥±30°范围之内后向散射的RCS,前向与侧向的散射还是很强。
外辐射源雷达是一种双基地雷达,它可以通过接收目标前向与侧向的散射回波信号来探测隐身目标。
其次,外辐射源信号多数工作在甚高频、超高频等波段,波长较长,隐身飞机表面的吸波材料对该波段电磁波的作用极差;再者,外辐射源雷达在形式上属双(多)基地雷达,可探测到隐身飞机前向和侧向的散射信号,具有空域上反隐身的特点。
因此,外辐射源雷达具有探测隐身目标的能力。
(2)探测低空与超低空目标外辐射源雷达利用各种民用或商用信号作为照射源,频率一般较低,波长较长,因此照射源能够通过衍射穿过低空障碍物探测到目标。
一种改进的外辐射源雷达直达波对消算法

一种改进的外辐射源雷达直达波对消算法李坤合; 芮义斌【期刊名称】《《电讯技术》》【年(卷),期】2019(059)011【总页数】6页(P1275-1280)【关键词】外辐射源雷达; 直达波对消; 步长调整; Sigmoid函数【作者】李坤合; 芮义斌【作者单位】南京理工大学电子工程与光电技术学院南京210094【正文语种】中文【中图分类】TN9551 引言直达波对消[1]是非合作双基地雷达系统中所面临的一个关键技术问题,直接影响到目标检测效果的好坏。
常用直达波抑制方式是自适应滤波法,如最小均方误差(Least Mean Square,LMS)算法[2]、递归最小二乘(Recursive Least Squares,RLS)算法[3]等,其中LMS算法以其计算复杂度低、结构简单易于实现的优势,得到广泛的应用。
为解决其定值步长导致的收敛速率慢的问题,诸多学者提出了一些LMS改进算法,如归一化的最小均方误差(Normalized Least Mean Square,NLMS)算法及其步长优化算法[4-6]、基于FFT的快速块最小均方(Frequency-domain Block LMS,FBLMS)算法[7]、基于Sigmoid函数变步长最小均方(Variable Step Size LMS based on Sigmoid function,SVSLMS)算法[8-9],以及基于抗干扰性能提出的改进算法[10-11]。
NLMS算法根据从参考信号的欧式平方进行步长调整,随着滤波器趋于稳定,步长也趋于稳定,与理想步长存在一定的差距。
在实际情况中,监测通道接收到的数据中除了直达波之外,还包括少量的多径干扰与目标回波,SVSLMS算法以及FBLMS算法只根据对消后的误差最小化原则进行自适应步长的调整,而误差中包含的多径与目标回波信号并不能直观地体现直达波对消情况,并非最优的步长因子的选择。
本文在研究SVSLMS算法的基础上利用对消信号与直达波的相关性代替误差来实现步长的自适应调整。
雷达信号处理中的目标跟踪方法

雷达信号处理中的目标跟踪方法目标跟踪是雷达信号处理的重要任务之一,它是通过分析雷达接收到的信号,实时追踪并确定目标的位置、速度和轨迹等信息。
目标跟踪在军事、航空航天、交通监控、环境监测等领域都具有广泛的应用。
本文将介绍雷达信号处理中常用的目标跟踪方法。
1. 卡尔曼滤波方法卡尔曼滤波方法是一种基于状态空间模型的目标跟踪方法。
该方法根据目标的运动模型和观测模型,通过预测目标的状态和测量目标的状态残差来估计目标的运动状态。
在雷达信号处理中,卡尔曼滤波方法通常用于目标的线性运动模型,对于目标速度较稳定的情况更为适用。
2. 粒子滤波方法粒子滤波方法是一种基于蒙特卡洛采样的目标跟踪方法。
该方法通过在状态空间中随机采样一组粒子,并基于测量信息对粒子进行重采样和权重更新,从而逼近目标的后验概率密度函数。
粒子滤波方法适用于非线性运动模型,并且在多目标跟踪问题中具有较好的性能。
3. 光流方法光流方法是一种基于图像序列的目标跟踪方法。
该方法通过分析连续图像帧中目标的移动来估计目标的运动状态。
在雷达信号处理中,光流方法可以通过分析雷达接收到的连续信号帧中目标的频率变化来实现目标跟踪。
光流方法适用于目标速度较慢、目标轨迹较短的情况。
4. 关联滤波方法关联滤波方法是一种基于关联度量的目标跟踪方法。
该方法通过计算目标与候选目标之间的相似度来实现目标的跟踪。
在雷达信号处理中,关联滤波方法可以通过计算目标与周围雷达回波之间的相似度来确定目标的位置和速度。
关联滤波方法适用于目标数量较少、目标与背景之间的差异明显的情况。
5. 神经网络方法神经网络方法是一种基于人工神经网络的目标跟踪方法。
该方法通过训练神经网络来学习目标的运动模式和特征,从而实现目标的跟踪和分类。
在雷达信号处理中,神经网络方法可以通过分析雷达接收到的信号特征来实现目标的跟踪和分类。
神经网络方法具有良好的自适应性和鲁棒性。
综上所述,雷达信号处理中的目标跟踪方法包括卡尔曼滤波方法、粒子滤波方法、光流方法、关联滤波方法和神经网络方法等。
基于外辐射源雷达系统的目标定位算法
sr o ain a d t c ig o e tr e s g t e sg a f h x e a mi e s i a go a h t rb e ie lc t n a k n f h g t i h in o e e tr l e t r s lb o o lm.A n w g r h frp s e o r t a u n l t n t l p e a o t m a i l i o s v
王超 锋 , 尹锦 荣
( 南京 电子技 术研 究所 , 南京 2 0 1 ) 10 3
【 摘要 】 基 于外 辐射 源的单站无源定位系统 实际相当于收发分 置的双基雷达 , 具有反侦察 、 干扰 、 抗 反隐身和 防反 辐
射导 弹等潜在优势 , 因此 利用外辐射源信号对 目标进 行无源定位和跟踪 是 目前国际上 比较 热门 的一个 研究课题 。提 出了
中 图 分 类 号 :N 5 T 98 文献标识码 : A
Art e i o r e c to fM o o t tc Pa sv ihm tc f r Ta g tLo a in o n sa i s i e Sy tm s d o tr lEm it r se Ba e n Ex e na te s
s c s a t ei t ee t nc c u trc u tr a u e。 ee t n o tat a g t a d c u t ra t・ d ai n mis e p e n y p s u h a ni l 。 lc r i o ne — o n eme r d tci fse h t r es n o n e n i a it s i 。 r s t 。 a ・ — n o s o l r o l e l
基于外辐射源信号的时差定位系统定位精度分析
关 键 词 : 辐 射 源 信 号 ;无 源 定 位 ;精 度 分 析 外 中图分类 号 : 7 TN 9 1 文 献 标 志码 :A D I 1 . 9 9 is . 【 15 6 2 1 . . 1 O : 0 3 6 /.s n 1) - 0 X. 0 0 ¨ 0 0
基于IEKF的目标、外辐射源联合跟踪滤波
u n k n o w n e x t e na r l e mi t t e r , o b j e c t s c a n b e d e t e c t e d .Me a n w h i l e ,t h e u n k n o w n e x t e na r l e m i t t e r c a n b e l o c a t e d a n d t r a c k e d .I t i s s h o w n t h a t t h i s a l g o r i t h m i s b e t t e r t o t r a c k o b j e c t s a n d e x t e na r l e m i t t e r .M o r e o v e r , t h i s lg a o r i t h m c o n v e r g e s f a s t e r t h a n E K F .
第3 5卷
第 2期
现 代 雷 达
Mo d e r n Ra d a r
V o 1 . 3 5 No . 2 F e b .2 01 3
2 0 1 3年 2月
・
信 号/ 数据处 理 ・
中 图 分 类 号: T N 9 5 7
文 献 标 志 码: A
文 章 编 号: 1 0 0 4 — 7 8 5 9 ( 2 0 1 3 } 0 2 — 0 0 3 1 — 0 4
隐身飞机等 ) 进行定位 、 跟踪 , 完成对空警戒 。外辐射
源雷 达采 用 测量 目标 的距 离 和 、 方 位 角 及 多 普 勒进 行
目标定位 。雷达在对 目标 的定位过程中, 用已知辐射 源的位置信息作为先验消息 , 对目 标进行定位解算 、 跟 踪等 。已知外辐射源信息通过常规手段可以获取 。 外辐射源雷达也可以探测雷达周围的外辐射源频 率, 以及外辐射源 的方位信息。在探测到的外辐射源 中, 有 未 知 的外辐 射 源 。未 知 外 辐 射 源 包 括 一 些 敌方
外辐射源雷达信号处理与目标跟踪方法研究
外辐射源雷达信号处理与目标跟踪方法研究外辐射源雷达信号处理与目标跟踪方法研究随着科技的不断发展,雷达技术在军事、民用等领域中扮演着重要的角色。
在一些特殊场景下,如对外辐射源进行监测和跟踪时,常规的雷达信号处理和目标跟踪方法难以满足需求,因此对其进行研究和改进具有重要意义。
外辐射源泛指那些以辐射能量形式直接向外界辐射的设备或物体。
这类辐射源的特点是其信号与背景噪声相似,且具有较高的复杂度。
因此,需通过对雷达信号的处理和分析,提取目标的特征信息,实现对外辐射源的跟踪和监测。
目前常用的外辐射源雷达信号处理方法主要包括滤波、特征提取和目标跟踪三个方面。
滤波是信号处理的基础,可以通过消除噪声和杂散信号,提高信号质量。
特征提取则是对信号进行分析,提取其中的关键特征,例如频率、幅度等信息。
目标跟踪是利用特征信息对目标进行跟踪,使用了多种算法如Kalman滤波器、粒子滤波等。
在滤波方面,为了消除噪声和杂散信号,可以采用数字滤波器对信号进行处理。
常用的数字滤波器包括低通滤波器、高通滤波器和带通滤波器等。
通过对信号进行滤波可以减少背景噪声的干扰,提高目标信号的信噪比。
特征提取是外辐射源雷达信号处理中的重要环节。
在特征提取过程中,首先需要对信号进行预处理,如信号的归一化、降噪等。
然后可以通过信号处理算法对信号进行分析,提取其中的关键特征。
这些特征可以包括频率、振幅、相位等信息。
特征提取的目的是为了辅助目标跟踪算法对目标进行准确的跟踪。
目标跟踪是外辐射源雷达信号处理的核心任务之一。
传统的目标跟踪算法如卡尔曼滤波器、最小二乘法等方法可以实现对目标的估计和预测。
然而,这些方法在复杂的信号背景下可能会出现跟踪不准确的情况。
因此,近年来研究人员提出了一些新的目标跟踪算法,如粒子滤波、神经网络等。
这些算法通过引入非线性因素,提高了目标跟踪的准确性和鲁棒性。
总结起来,外辐射源雷达信号处理与目标跟踪方法的研究是一项具有重要实际意义的工作。
外辐射源雷达
外辐射源雷达
外辐射源雷达是一种用于探测和监测来自外部辐射源的雷达系统。
外部辐射源包括无线电信号,如广播电台、手机信号、卫星通信等。
外辐射源雷达可以探测并定位这些信号的源头,用于情报收集、无线电监测、频谱管理等领域。
外辐射源雷达的工作原理类似于常规雷达,通过发射无线电波并接收反射回来的信号来探测目标。
不同之处在于,外辐射源雷达是专门设计用于分析和识别无线电信号的特性和参数。
它能够根据信号的频率、功率、调制方式等特征来识别不同的信号源,并通过测量信号到达时间和方向等参数来定位信号源的位置。
外辐射源雷达通常由多个接收天线组成,可以实现对多个方向的信号进行同步测量。
通过分析多个接收天线接收到的信号,可以确定信号源的角度和距离。
另外,外辐射源雷达还可以通过多普勒频移来判断信号源的运动状态和速度。
外辐射源雷达在军事和民用领域中有广泛的应用。
它可以用于监测无线电干扰、窃听和侦查行为,用于频谱监测和频率规划,也可以用于对敌方无线电通信和雷达系统进行情报收集和干扰。
雷达导航系统中的目标跟踪算法研究
雷达导航系统中的目标跟踪算法研究随着雷达技术的快速发展,雷达导航系统在军事、民用以及交通领域等方面的应用越来越广泛。
目标跟踪算法作为雷达导航系统中的核心环节,对系统的性能和可靠性起着至关重要的作用。
本文将对雷达导航系统中的目标跟踪算法进行研究,旨在提出一种高效准确的目标跟踪算法,以满足系统在复杂环境中的要求。
目标跟踪在雷达导航系统中的作用非常重要,主要用于实时检测目标物体的位置、速度和运动轨迹,从而及时进行安全预警和避障控制。
在常见的雷达导航系统中,目标跟踪算法主要包括单目标和多目标两种情况。
针对单目标情况,常用的目标跟踪算法包括卡尔曼滤波算法、扩展卡尔曼滤波算法以及粒子滤波算法。
针对多目标情况,常用的目标跟踪算法包括多普勒跟踪算法、多假设跟踪算法和级联跟踪算法。
在单目标目标跟踪算法中,卡尔曼滤波算法是最为经典的方法之一。
它基于随机变量的贝叶斯滤波理论,通过对目标物体的状态进行预测和修正,并利用系统的观测信息进行更新,实现对目标位置和速度的准确估计。
扩展卡尔曼滤波算法在卡尔曼滤波算法的基础上考虑了非线性问题,其鲁棒性和准确性更高,但计算复杂度也更高。
粒子滤波算法则借助一系列离散的粒子来表示目标的状态空间,通过重采样和权重更新等操作,实现对目标轨迹的估计。
这些算法在目标跟踪中都有着很好的效果,但也存在着一定的局限性,如对目标速度突变和噪声扰动的敏感性较高。
在多目标跟踪算法中,多普勒跟踪算法是非常常用的方法之一。
它通过测量目标物体的多普勒频移来实现对目标速度的估计,进而实现目标位置和轨迹的估计。
多假设跟踪算法则通过对多个可能的目标位置进行假设,并根据观测信息的置信度对假设进行验证和更新,从而实现对多目标的跟踪。
级联跟踪算法将多目标跟踪问题分解为多个单目标跟踪问题,通过级联关系的建立和更新,实现对多目标的跟踪和估计。
这些算法对于复杂背景下的多目标跟踪具有很好的效果,但也存在着对目标数目和目标运动模型的限制。
一种基于外辐射源唯多普勒量测的目标跟踪算法
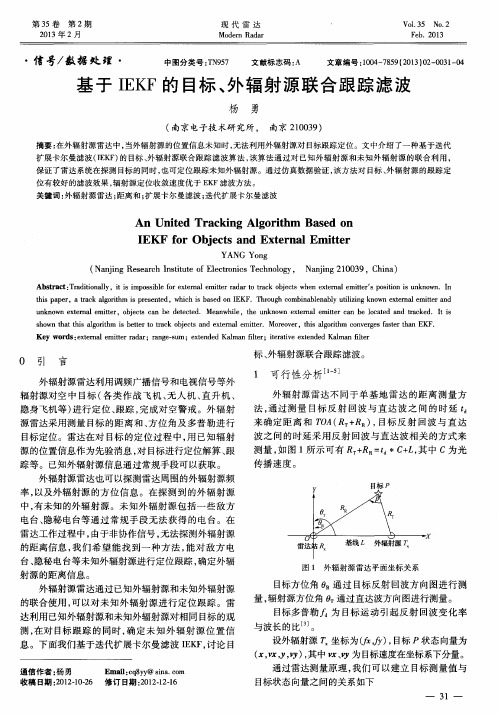
噪声 ; ∈R 为 系 统状 态 向量 , 目标 跟 踪 问 题 在
概率密度函数只依赖于 和 ~ , l即只需保存粒
子 当前 的状态 。而粒 子状态 的历史 路径 X:和 O k 观测 的历 史 值 g:都 不 需 保 存 。 由此 , 法 可 大 l k 算
中它由目标位置和速度等信息组成 ; ∈R 为系 n 统观测 向量 。 ( ) ・为状态转移 函数, ・为系 h()
强度 以及 展开 点 的选择 。在 满 足 系 统 为线 性 , 噪
A( k , + x -)
一 ・
+
声、 后验 概 率 为 高斯 的件 下, 算 法是 最 优算 该 法 j 。利 用测 多普勒 频率 信息 的运动 目标无 源 定
位 跟踪 是 一个 典 型 的强 非 线性 问题 , 述条 件 通 上 常很 难 满 足 。而 粒 子 滤 波 方 法 ( aieft , pnc lr l i e
( K F ,t r oe grh o s e e et a o ef ac n xii o byl s o E P ) h po sda oi m s w tr sm t npr r n eadehbtnt l e n— e p l t h b t i i o m s a sc
p tt n lc s ta KP g r h . u ai a o thn E F a o t m o l i
Ke wo d :p ril le ; xe d d Kama l r Do pe r q e y i u n tro p o u iy y r s atce f tr e tn e l n f t ; p lrfe u nc ;l mi ao fo p r nt i i e l t
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
近年 来 , 源 雷达 由于其 良好 的“ 无 四抗 ” 能力而成 为各 国争 相研究 的 重点l . _ 无源 雷达 又称 为外辐 射 源雷 1 ] 达, 是指 本身不 发射 电磁 波信号 , 是利用 第 三方照 射源 发射 或 目标 自身 辐射 的 电磁波信 号来 对 目标进行 探 而 测 和跟踪 的雷 达. 者研 究 的外 辐 射源雷 达【。 用调频 广播 电台作为 照射 源 , 于前 者. 笔 利 属 主要对 外辐 射源 雷 达 跟踪 算 法 的性 能 进 行 研 究 , 据 T ) T meOfAria) 位 原 理 , 别 结 合 E F( tn e l n 依 (A( i r 1定 v 分 K Exe d d Kama Fl r 和 P ( at l Fl r 算法 对 目标进行 跟 踪. KF算法 是 一 种经 典 的非 线性 滤 波算 法 , 过对 非 线 ie) t F P ri e i e) c t E 通 性方 程线 性化来 进行 非线 性滤 波 ;P F是基 于递 归蒙 特卡 洛方 法的非 线性 非 高斯滤 波算 法 , 由于 能够解 决 非 线性非 高斯 问题 而成 为近年 研究 的热 点. 者对 两种算 法在 高斯 噪声 、 笔 闪烁 噪声 环境 下 以及 在 电 台不 同布 站 形式下 的跟 踪性 能进行 了分 析 , 对 两者 的计算 时间进 行 了 比较 . 并
ag rt m sa d t i ac lto t e a e s u id, a a t s t a afc t r c n e ii n ldig gl t lo ih n her c lua in i r t de m nd fcor h t fe t he ta kig prcson icu n i n n ie a d st- e ly n r s ic s d.S mult e u t n e l a as ow h tt ePF smor da tv o o s n ie d po i g aealo ds use i a i r s lsa d r a t h on d t a h i ea p iet g itn iee i n e .Ne e t ee s t e EKF a aif e ltme pr c s ig.M o e v r e s na e st- ln o s nvr m nt o v rh ls , h c n s ts y y a i o e sn r o e ,a r a o bl ie
可进 一 步 提 高 无源 跟踪 精度 .
关 键 词 : 外辐 射源 雷达 ; 展 卡 尔 曼 滤 波 ; 子 滤 波 ; 扩 粒 跟踪 性 能 中 图分 类 号 : TN9 8 9 5.7 文献 标 识 码 : A 文 章 编 号 : o 12 0 ( 0 0 0 —0 8 0 1 o — 4 0 2 1 ) 61 4 —5
( to a La .o d rS g a Pr c s i g Na in l b fRa a i n l o e sn ,Xi in Un v ,Xi n 7 0 7 ,Ch n ) da i . ’ 10 1 a ia Ab ta t Sn e t e p s ie r d r b s d o h M a i t t n h s a lw r c ig p e iin t i p p r sr c : i c h a s a a a e n t e F v r do sa i a o ta k n r c o , hs a e o s p o o e h tt e t f r v l T(AJ Ic t n meh d b o i e t h t n e l n F l r E r p s s t a h i o r a( ) o ai t o e c mbn d wi t e Ex e d d Kama i e ( KF me a i o h t )
21 0 0年 1 2月 第 3 7卷 第 6期
西 安 电子 科 技 大 学 学 报 ( 自然 科 学 版 )
t
De . O 0 c2 1
J OUR NAL OF XI AN UNI DI VERSI TY
Vo | 7 No 6 l3 .
两 种 外 辐 射源 雷 达 跟 踪 算 法性 能 分 析
Pe f r a c na y i f t s i e r d r t a ki g a g r t r o m n e a l ss o wo pa s v a a r c n l o ihms
LIH o g we . WAN G Y n. U u c u n i u LI Y —h n
a d P r i e F l r F e p cie y t mp o ep s ieta kn e f r n e rc ig p ro ma c ft e t n a t l i e & )r s e t l i r v a sv r c ig p r ma c .T a k n e fr n eo h WO c t v O o
李 红 伟 , 王 俊 , 刘 玉 春
( 安 电子 科 技 大 学 雷 达 信 号 处 理 国 家重 点 实 验 室 , 西 西安 7 0 7 ) 西 陕 播 电 台为 辐 射 源 的 无 源 雷 达 跟 踪 精 度 较 低 的 问 题 , 到 达 时 间 定 位 方 法 分 别 与 扩 将
展 卡 尔 曼 滤 波 和 粒 子 滤 波 算 法 结 合 来 提 高 跟 踪 精度 . 析 了高 斯 噪 声 环 境 、 烁 噪 声 环 境 及 雷达 布 站 方 分 闪 式 对 两 种 算 法 跟 踪 精度 的 影 响 , 比较 了 两种 算 法 的运 算 时 间. 真 和 实 测 数 据 表 明 : 子 滤 波 算 法 更 并 仿 粒 适合于闪烁噪声环境下的跟踪, 而扩 展 卡 尔曼 滤 波 能 满 足 实 时处 理 的 要 求. 外 , 理 的 雷达 布 站 方 式 另 合
d po ig s h me wi u t e r vd e t rta k n r cs n e l yn c e l f rh rp o iea b te rc ig p e i o l i
Ke 0 ds: p s i e r da :ex e e a m a it r;p tc e fle yW r a sv a r t nd d K l n fle aril i r;t a k n r o m a c t r c i g pe f r n e