机械系统创新设计-机械系统创新案例111共69页PPT资料
合集下载
机械系统创新设计-机械系统创新案例111

四杆机构和六杆机构。还可求出另两个同迹六杆机构, 如图7-4的下面两图。
图7-4
3.应用实例
图7-5是车轮六杆悬挂装置。
第三节 新型内燃机的开发
1.往复式内燃机的技术矛盾:
工作机构及气阀控制机构组成复杂,零件多。曲轴等 零件结构复杂、工艺性差。 机构运动惯性力大,因此增大轴承惯性载荷,使系统 不平衡产生振动,也限制了输出轴转速的提高。
Hale Waihona Puke 第二节 同轨迹连杆机构同轨迹四连杆机构是指自由度 F相同、输入构件 的运动规律相同、输出构件上的一点轨迹相同的一组 连杆机构,但这组连杆机构的运动学尺寸不同,所以 其受力状态、动态性能有巨大差异。因而,同轨迹连 杆机构的形成方法是机构创新设计的重要方法之一。 形成同轨迹连杆机构的罗伯特-契贝谢夫定理是 由美国数学家萨姆尔·罗伯特于1875年和俄国学者契 贝谢夫于1878年分别发现的,因此称为“罗伯特-契 贝谢夫定理”。该定理的内容是:由一个四杆铰链机 构发生的一条连杆曲线,还可以由另外两个四杆铰链 机构发生出来。或表述为同一连杆曲线,可以用三个 不同的机构来实现。
3.旋转式内燃发动机
(直接将燃料的动力转化为回转运动输出)
组成情况:椭圆形汽缸,三角形转子(转子的内孔上有齿),外齿轮,吸 气口,排气口,火花塞。 工作原理:吸气、压缩、燃爆、排气。随着这四个物理功能致使三角形转 子与椭圆汽缸之间的空腔体积发生变化,则转子进行转动。 性能特点:结构简单,零件数量比往复发动机少40%,体积减少50%, 重量下降1/2到2/3;但存在汽缸上产生振纹的问题。其原因是与密封片 的材料与形状有关。 运动设计:三角转子相当于行星内齿轮2,系杆H是发动机的输出轴,1为 中心轮,并且:z2/z1=1.5,则:nH/n2=3 。见下页图。
图7-4
3.应用实例
图7-5是车轮六杆悬挂装置。
第三节 新型内燃机的开发
1.往复式内燃机的技术矛盾:
工作机构及气阀控制机构组成复杂,零件多。曲轴等 零件结构复杂、工艺性差。 机构运动惯性力大,因此增大轴承惯性载荷,使系统 不平衡产生振动,也限制了输出轴转速的提高。
Hale Waihona Puke 第二节 同轨迹连杆机构同轨迹四连杆机构是指自由度 F相同、输入构件 的运动规律相同、输出构件上的一点轨迹相同的一组 连杆机构,但这组连杆机构的运动学尺寸不同,所以 其受力状态、动态性能有巨大差异。因而,同轨迹连 杆机构的形成方法是机构创新设计的重要方法之一。 形成同轨迹连杆机构的罗伯特-契贝谢夫定理是 由美国数学家萨姆尔·罗伯特于1875年和俄国学者契 贝谢夫于1878年分别发现的,因此称为“罗伯特-契 贝谢夫定理”。该定理的内容是:由一个四杆铰链机 构发生的一条连杆曲线,还可以由另外两个四杆铰链 机构发生出来。或表述为同一连杆曲线,可以用三个 不同的机构来实现。
3.旋转式内燃发动机
(直接将燃料的动力转化为回转运动输出)
组成情况:椭圆形汽缸,三角形转子(转子的内孔上有齿),外齿轮,吸 气口,排气口,火花塞。 工作原理:吸气、压缩、燃爆、排气。随着这四个物理功能致使三角形转 子与椭圆汽缸之间的空腔体积发生变化,则转子进行转动。 性能特点:结构简单,零件数量比往复发动机少40%,体积减少50%, 重量下降1/2到2/3;但存在汽缸上产生振纹的问题。其原因是与密封片 的材料与形状有关。 运动设计:三角转子相当于行星内齿轮2,系杆H是发动机的输出轴,1为 中心轮,并且:z2/z1=1.5,则:nH/n2=3 。见下页图。
机械创新设计实例分析课件PPT(共 36张)
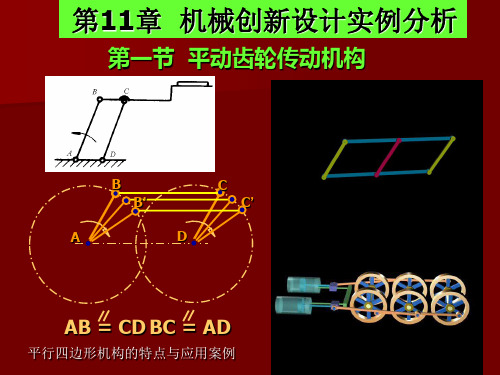
第一节 平动齿轮传动机构
1. 应用了平行四边形机构和齿轮机构的串 行连接;
平动齿轮创新设计方法总结: 2. 应用了三套机构的并行连接;
3. 应用了转动副的销钉扩大和尺寸变化等 演化与变异设计。
第一节 平动齿轮传动机构
二、平动齿轮传动的关键技术
使齿轮实现圆平动运动的机构称为圆平动机构。常用的圆平动机构有: 1.用平行四边形机构实现齿轮圆平动
第一节 平动齿轮传动机构
2.用正弦机构实现齿轮圆平动 3.用孔销机构实现齿轮圆平动
应用“机构同性异形变换原理”,还可以演化出多种圆平动机构。它 的性能决定了平动齿轮传动的性能,所以每综合出一种圆平动机构,就得 到一种新型平动齿轮传动。
第一节 平动齿轮传动机构
三、平动齿轮机构的演化
平动发生器是平动齿轮机构的关键技术。不同的平动发生器,会演化出 结构不同的平动齿轮机构,相同的平动发生器,结构不同,也会演化出性能 差异很大的平动齿轮传动装置。
•
13、要相信,这个世界上永远能够依靠的只有你自己。所以,管别人怎么看,坚持自己的坚持,直到坚持不下去为止。
•
14、也许你想要的未来在别人眼里不值一提,也许你已经很努力了可还是有人不满意,也许你的理想离你的距离从来没有拉近过......但请你继续向前走,因为别人看不到你的努力,你却始终看得见自己。
•
第二节 机构应用创新设计案例分析
三.Stewart机构的应用创新设计
Stewart平台机构
Stewart平台机构用于运动模拟器
第二节 机构应用创新设计案例分析
三.Stewart机构的应用创新设计
俄罗斯Lapic 公司的KNM-750
世界上第一台并联机床
第二节 机构应用创新设计案例分析
机械创新设计机械系统运动方案设计PPT教案
第13页/共65页
(2)工艺功能
工艺功能是以加工对象为目的,是对物体实施某种加工工艺,如刮 削器的刮削功能、机床的切削功能、挖掘机的挖掘功能、犁的翻地 功能。 这些功能由执行构件实现,如机床的刀具、挖掘机的挖斗、犁的 犁头等。
第14页/共65页
功能要求考虑不周,导致机械系统设计失败的案例
图3-2硬币清点机构
第12页/共65页
(1)动作功能
动作功能是以实现动作为目的,不对物体进行加工。 简单动作一般是一次性动作,如由链齿和拉头组成的拉链,只实
现闭合和开启的简单动作。 复杂动作功能不仅要实现连续的传动,而且还要实现复杂的运动
规律以及运动型式变换。实现这类功能的机构一般比较复杂,常 采用机构的组合方式实现。如机械手的抓取与送料复合运动功能。
(A)对于干粉压片机,其生产率为每分钟加工的片数; (B)对于书本打包机,其生产率为每小时能够包装书的本数。 理想生产能力:机械系统在理想状态下单位时间内加工出的产品
数量。 实际生产能力:机械系统在正常运行期间单位时间内平均生产合
格产品的实际数量。 实际生产能力一般小于理论生产能力。
第7页/共65页
第15页/共65页
2.功能原理设计
综合分析法:将机械系统的总功能分解成若干子功能元,然后 求解子功能元,再将其组合,得到满足总功能要求的多种解决方案, 以供评价与选择。
某自动包装机的功能是将物 料装入袋中包装。 可分解为如下分功能:自动 完成计量、填料、制袋、封 合、打印生产批号、切断、 输送等。
第8页/共65页
(3)工艺参数
工艺参数包括运动参数和动力参数。 ① 运动参数:执行构件的转速、移动速度及调速范围等。 如: 机床等机械设备的主轴最高和最低转速 工作台或刀架的移动速度 移动机械的行驶速度范围 连续作业机械的生产拍节等。 运动参数是由机械的工艺要求决定的,应包括: 运动形式(直线运动、回转运动、曲线运动) 运动特点(连续式、间歇式、往复式) 运动范围(极限尺寸、转角及位移) 运动速度(等速、不等速)
(2)工艺功能
工艺功能是以加工对象为目的,是对物体实施某种加工工艺,如刮 削器的刮削功能、机床的切削功能、挖掘机的挖掘功能、犁的翻地 功能。 这些功能由执行构件实现,如机床的刀具、挖掘机的挖斗、犁的 犁头等。
第14页/共65页
功能要求考虑不周,导致机械系统设计失败的案例
图3-2硬币清点机构
第12页/共65页
(1)动作功能
动作功能是以实现动作为目的,不对物体进行加工。 简单动作一般是一次性动作,如由链齿和拉头组成的拉链,只实
现闭合和开启的简单动作。 复杂动作功能不仅要实现连续的传动,而且还要实现复杂的运动
规律以及运动型式变换。实现这类功能的机构一般比较复杂,常 采用机构的组合方式实现。如机械手的抓取与送料复合运动功能。
(A)对于干粉压片机,其生产率为每分钟加工的片数; (B)对于书本打包机,其生产率为每小时能够包装书的本数。 理想生产能力:机械系统在理想状态下单位时间内加工出的产品
数量。 实际生产能力:机械系统在正常运行期间单位时间内平均生产合
格产品的实际数量。 实际生产能力一般小于理论生产能力。
第7页/共65页
第15页/共65页
2.功能原理设计
综合分析法:将机械系统的总功能分解成若干子功能元,然后 求解子功能元,再将其组合,得到满足总功能要求的多种解决方案, 以供评价与选择。
某自动包装机的功能是将物 料装入袋中包装。 可分解为如下分功能:自动 完成计量、填料、制袋、封 合、打印生产批号、切断、 输送等。
第8页/共65页
(3)工艺参数
工艺参数包括运动参数和动力参数。 ① 运动参数:执行构件的转速、移动速度及调速范围等。 如: 机床等机械设备的主轴最高和最低转速 工作台或刀架的移动速度 移动机械的行驶速度范围 连续作业机械的生产拍节等。 运动参数是由机械的工艺要求决定的,应包括: 运动形式(直线运动、回转运动、曲线运动) 运动特点(连续式、间歇式、往复式) 运动范围(极限尺寸、转角及位移) 运动速度(等速、不等速)
机械系统创新设计-89机械系统创新实例71页PPT
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起而 读书。 ——周 恩来
ቤተ መጻሕፍቲ ባይዱ
1、不要轻言放弃,否则对不起自己。
2、要冒一次险!整个生命就是一场冒险。走得最远的人,常是愿意 去做,并愿意去冒险的人。“稳妥”之船,从未能从岸边走远。-戴尔.卡耐基。
梦 境
3、人生就像一杯没有加糖的咖啡,喝起来是苦涩的,回味起来却有 久久不会退去的余香。
机械系统创新设计-89机械系统创新实例 4、守业的最好办法就是不断的发展。 5、当爱不能完美,我宁愿选择无悔,不管来生多么美丽,我不愿失 去今生对你的记忆,我不求天长地久的美景,我只要生生世世的轮 回里有你。
机械系统创新设计实例分析共32页文档

机械系统创新设计实例分析
6、法律的基础有两个,而且只有两个……公平和实用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
6、法律的基础有两个,而且只有两个……公平和实用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
获得两个同迹连杆机构尺寸的A·凯莱作图法:想象 7-3a中机架铰链A0、B0、C0没有结牢,随后拉动A0、B0、 C0互相脱开,直到各个连杆机构的曲柄、连杆和从动件 形成一条直线,便得到图7-3b,后者的机架距离不等于 前者,但两图中所有活动构件的长度是正确的,所有的 角度也是正确的。对于任一给定的带连杆点的铰链四杆 机构,都可以作出如图7-3b这样一个图形而获得它的另 外两个同迹连杆机构的尺寸。
第二节 同轨迹连杆机构
同轨迹四连杆机构是指自由度 F相同、输入构件 的运动规律相同、输出构件上的一点轨迹相同的一组 连杆机构,但这组连杆机构的运动学尺寸不同,所以 其受力状态、动态性能有巨大差异。因而,同轨迹连 杆机构的形成方法是机构创新设计的重要方法之一。
形成同轨迹连杆机构的罗伯特-契贝谢夫定理是 由美国数学家萨姆尔·罗伯特于1875年和俄国学者契 贝谢夫于1878年分别发现的,因此称为“罗伯特-契 贝谢夫定理”。该定理的内容是:由一个四杆铰链机 构发生的一条连杆曲线,还可以由另外两个四杆铰链 机构发生出来。或表述为同一连杆曲线,可以用三个 不同的机构来实现。
图7-3
图7-4的左上图就不能用A·凯莱作图法,因为 三个连杆机构压缩成一条直线。把O1ABO2作为一个原 始机构,为了找到连杆AB延长线上K点的同轨迹机构, 在机架O1O2 的延长线上作O3,使O1O2:O2O3=AB:BK, 然后,依次作三个平行四边形。于是得到了同迹四杆 机构 O2O3B2C2,C2B2延长线上点K与原始机构中的K点 轨迹相同。
第一个同迹连杆机构设计如图7 -2b所示,在原始机构上作平行四边 形导引机构BODK。曲柄C0CDO为所 示的第一个同迹连杆机构,K为连杆 CD延长线上的点。所示曲柄拉摇杆机 构的尺寸,如图中下面的公式。
第二个同迹连杆机构设计如图7 -2c所示,在原始机构上作平行四边 形导引机构A0AKE。双摇杆机构 A0EFCO为所求的第二个同迹连杆机 构。
1.连杆点K位于连杆两铰链连线上的同迹连杆机构
图形缩放原理如下图7-2a所示为一平行四边形机构, 由平行四边形OBKD与机架在O点铰接而成。A点为BK杆延长 线上的一点。连接AO得交点C。当A点沿任意给定轨迹运动 时,C点将给出与A点相似但缩小了的轨迹。⑴AO除以CO与 AB除以KB的值是相等的为常数m(射线定理)。⑵当此四边 形作为一刚体绕O转动一角度时,A点转到A',按射线定理 有AA'与CC'的比值与AO与CO的比例等于常数m。A点的一切 运动都是这两部分运动的合成。因此C点的运动是以缩小的 比例模拟A点的运动,反之亦然。
第三个同迹连杆机构设计如图7 -2d所示,CO是两具同迹连杆机构 中共同的新机架的固定铰链点,机架 的三个固定铰链点A0与O,A0与CO, O与CO。
2.任意连杆点 K的同迹连杆机构
在图7-3a中,四杆机构A0A1B1B0为A1B1上有附加连 杆点K的原始机构。由罗伯特-契贝谢夫定理决定的另两 个四杆机构为A0A2C2C0和B0B3C3C0。在这3个同迹连杆机 构中有四个相似三角形;有三个不同的平行四边形。
第八章 机构创新案例1
第一节 活齿减速带轮机构
1、概能不同:带传动结构简单、传 动平稳、造价低廉、不需润滑、能缓和冲击和过 载打滑、噪声小;行星传动结构紧凑、传动比大、 传动效率高、承载能力强。将带传动和行星传动 组合起来,在不增加带轮外廓尺寸的条件下,研 制出具有两种传动综合优良性能的行星减速带轮, 是开发高性能传动元件的重要课题。
3.旋转式内燃发动机
(直接将燃料的动力转化为回转运动输出)
组成情况:椭圆形汽缸,三角形转子(转子的内孔上有齿),外齿轮,吸 气口,排气口,火花塞。 工作原理:吸气、压缩、燃爆、排气。随着这四个物理功能致使三角形转 子与椭圆汽缸之间的空腔体积发生变化,则转子进行转动。 性能特点:结构简单,零件数量比往复发动机少40%,体积减少50%,重量 下降1/2到2/3;但存在汽缸上产生振纹的问题。其原因是与密封片的材料 与形状有关。 运动设计:三角转子相当于行星内齿轮2,系杆H是发动机的输出轴,1为 中心轮,并且:z2/z1=1.5,则:nH/n2=3 。见下页图。
2.无曲轴式活塞发动机
结构创新:利用机构等效代换原理。以反凸轮机构代还 原发动机的曲柄滑块机构。使零件减少,结构简单,成 本降低。 运动原理:活塞往复运动,由推杆端部的滑块在凸轮槽 中滑动致使凸轮转动,再经输出轴输出转矩。 性能特点:系统中不需要飞轮,转动平稳;通过改变凸 轮轮廓形状可以改变输出轴转速,达到减速增矩的目的。 应用:重型机械、船舶、建筑机械等。
图7-4的左上的a、b两图是描绘同一连杆曲线的 四杆机构和六杆机构。还可求出另两个同迹六杆机构, 如图7-4的下面两图。
图7-4
3.应用实例
图7-5是车轮六杆悬挂装置。
第三节 新型内燃机的开发
1.往复式内燃机的技术矛盾:
工作机构及气阀控制机构组成复杂,零件多。曲轴等 零件结构复杂、工艺性差。 机构运动惯性力大,因此增大轴承惯性载荷,使系统 不平衡产生振动,也限制了输出轴转速的提高。 曲轴回转两周才又一次动力输出,效率低。
3.活齿减速带轮的形成 由外激波摆动活齿传动与带传动机构的从动带轮合二为
一形成的行星减速带轮,是一种新型减速装置。它具有带传 动可靠性高、减振能力强等优点,又保持了摆动活齿传动无 W输出机构带来的一系列优点,并成功地克服了外激波摆动 活齿传动外激波器尺寸大带来的动平衡性能差的缺点。 ⑴带轮与外激波器的组合 ⑵带轮激波器使绕固定轴传动的带轮成为外激波器的一部分 ⑶卸荷带轮设计
图7-1外激波摆动活齿传动的结构模型和传动原理图
② 传动比计算。 ③ 外齿中心轮的齿形综合。 ④ 外激波摆动活齿传动的优缺点。
⑵带传动的选择 带传动由带轮、带和支承件组成。利用张紧在带轮上的
带和带轮间的摩擦力来传递运动和动力。带传动的优点是结 构简单、传动平稳、能缓和冲击和过载打滑,缺点是传动比 较小且不准确,且在结构上从动带轮占据的空间没有充分利 用。
第二节 同轨迹连杆机构
同轨迹四连杆机构是指自由度 F相同、输入构件 的运动规律相同、输出构件上的一点轨迹相同的一组 连杆机构,但这组连杆机构的运动学尺寸不同,所以 其受力状态、动态性能有巨大差异。因而,同轨迹连 杆机构的形成方法是机构创新设计的重要方法之一。
形成同轨迹连杆机构的罗伯特-契贝谢夫定理是 由美国数学家萨姆尔·罗伯特于1875年和俄国学者契 贝谢夫于1878年分别发现的,因此称为“罗伯特-契 贝谢夫定理”。该定理的内容是:由一个四杆铰链机 构发生的一条连杆曲线,还可以由另外两个四杆铰链 机构发生出来。或表述为同一连杆曲线,可以用三个 不同的机构来实现。
图7-3
图7-4的左上图就不能用A·凯莱作图法,因为 三个连杆机构压缩成一条直线。把O1ABO2作为一个原 始机构,为了找到连杆AB延长线上K点的同轨迹机构, 在机架O1O2 的延长线上作O3,使O1O2:O2O3=AB:BK, 然后,依次作三个平行四边形。于是得到了同迹四杆 机构 O2O3B2C2,C2B2延长线上点K与原始机构中的K点 轨迹相同。
第一个同迹连杆机构设计如图7 -2b所示,在原始机构上作平行四边 形导引机构BODK。曲柄C0CDO为所 示的第一个同迹连杆机构,K为连杆 CD延长线上的点。所示曲柄拉摇杆机 构的尺寸,如图中下面的公式。
第二个同迹连杆机构设计如图7 -2c所示,在原始机构上作平行四边 形导引机构A0AKE。双摇杆机构 A0EFCO为所求的第二个同迹连杆机 构。
1.连杆点K位于连杆两铰链连线上的同迹连杆机构
图形缩放原理如下图7-2a所示为一平行四边形机构, 由平行四边形OBKD与机架在O点铰接而成。A点为BK杆延长 线上的一点。连接AO得交点C。当A点沿任意给定轨迹运动 时,C点将给出与A点相似但缩小了的轨迹。⑴AO除以CO与 AB除以KB的值是相等的为常数m(射线定理)。⑵当此四边 形作为一刚体绕O转动一角度时,A点转到A',按射线定理 有AA'与CC'的比值与AO与CO的比例等于常数m。A点的一切 运动都是这两部分运动的合成。因此C点的运动是以缩小的 比例模拟A点的运动,反之亦然。
第三个同迹连杆机构设计如图7 -2d所示,CO是两具同迹连杆机构 中共同的新机架的固定铰链点,机架 的三个固定铰链点A0与O,A0与CO, O与CO。
2.任意连杆点 K的同迹连杆机构
在图7-3a中,四杆机构A0A1B1B0为A1B1上有附加连 杆点K的原始机构。由罗伯特-契贝谢夫定理决定的另两 个四杆机构为A0A2C2C0和B0B3C3C0。在这3个同迹连杆机 构中有四个相似三角形;有三个不同的平行四边形。
第八章 机构创新案例1
第一节 活齿减速带轮机构
1、概能不同:带传动结构简单、传 动平稳、造价低廉、不需润滑、能缓和冲击和过 载打滑、噪声小;行星传动结构紧凑、传动比大、 传动效率高、承载能力强。将带传动和行星传动 组合起来,在不增加带轮外廓尺寸的条件下,研 制出具有两种传动综合优良性能的行星减速带轮, 是开发高性能传动元件的重要课题。
3.旋转式内燃发动机
(直接将燃料的动力转化为回转运动输出)
组成情况:椭圆形汽缸,三角形转子(转子的内孔上有齿),外齿轮,吸 气口,排气口,火花塞。 工作原理:吸气、压缩、燃爆、排气。随着这四个物理功能致使三角形转 子与椭圆汽缸之间的空腔体积发生变化,则转子进行转动。 性能特点:结构简单,零件数量比往复发动机少40%,体积减少50%,重量 下降1/2到2/3;但存在汽缸上产生振纹的问题。其原因是与密封片的材料 与形状有关。 运动设计:三角转子相当于行星内齿轮2,系杆H是发动机的输出轴,1为 中心轮,并且:z2/z1=1.5,则:nH/n2=3 。见下页图。
2.无曲轴式活塞发动机
结构创新:利用机构等效代换原理。以反凸轮机构代还 原发动机的曲柄滑块机构。使零件减少,结构简单,成 本降低。 运动原理:活塞往复运动,由推杆端部的滑块在凸轮槽 中滑动致使凸轮转动,再经输出轴输出转矩。 性能特点:系统中不需要飞轮,转动平稳;通过改变凸 轮轮廓形状可以改变输出轴转速,达到减速增矩的目的。 应用:重型机械、船舶、建筑机械等。
图7-4的左上的a、b两图是描绘同一连杆曲线的 四杆机构和六杆机构。还可求出另两个同迹六杆机构, 如图7-4的下面两图。
图7-4
3.应用实例
图7-5是车轮六杆悬挂装置。
第三节 新型内燃机的开发
1.往复式内燃机的技术矛盾:
工作机构及气阀控制机构组成复杂,零件多。曲轴等 零件结构复杂、工艺性差。 机构运动惯性力大,因此增大轴承惯性载荷,使系统 不平衡产生振动,也限制了输出轴转速的提高。 曲轴回转两周才又一次动力输出,效率低。
3.活齿减速带轮的形成 由外激波摆动活齿传动与带传动机构的从动带轮合二为
一形成的行星减速带轮,是一种新型减速装置。它具有带传 动可靠性高、减振能力强等优点,又保持了摆动活齿传动无 W输出机构带来的一系列优点,并成功地克服了外激波摆动 活齿传动外激波器尺寸大带来的动平衡性能差的缺点。 ⑴带轮与外激波器的组合 ⑵带轮激波器使绕固定轴传动的带轮成为外激波器的一部分 ⑶卸荷带轮设计
图7-1外激波摆动活齿传动的结构模型和传动原理图
② 传动比计算。 ③ 外齿中心轮的齿形综合。 ④ 外激波摆动活齿传动的优缺点。
⑵带传动的选择 带传动由带轮、带和支承件组成。利用张紧在带轮上的
带和带轮间的摩擦力来传递运动和动力。带传动的优点是结 构简单、传动平稳、能缓和冲击和过载打滑,缺点是传动比 较小且不准确,且在结构上从动带轮占据的空间没有充分利 用。