单只数码管循环显示0-9
数码管的显示的实验报告
数码管的显示的实验报告数码管的显示的实验报告引言:数码管是一种常见的数字显示装置,广泛应用于各种电子设备中。
本实验旨在通过实际操作,了解数码管的原理和工作方式,并通过一系列实验验证其显示效果和功能。
实验一:数码管的基本原理数码管是由多个发光二极管(LED)组成的,每个发光二极管代表一个数字或符号。
通过对不同的发光二极管进行点亮或熄灭,可以显示出不同的数字或符号。
本实验使用的是共阳数码管,即共阳极连接在一起,而阴极分别连接到控制芯片的输出引脚。
实验二:数码管的驱动电路为了控制数码管的显示,需要使用驱动电路。
常见的驱动电路有共阴极驱动和共阳极驱动两种。
本实验使用的是共阳极驱动电路。
驱动电路由控制芯片、电阻和电容组成。
控制芯片通过控制输出引脚的高低电平来控制数码管的点亮和熄灭。
实验三:数码管的显示效果通过控制芯片的输出引脚,可以实现数码管的显示效果。
本实验使用的是四位数码管,可以显示0-9的数字。
通过改变控制芯片输出引脚的电平,可以控制数码管显示不同的数字。
实验中通过编写程序,使数码管显示从0到9的数字循环显示,并通过按键控制数字的增加和减少。
实验四:数码管的多位显示除了显示单个数字外,数码管还可以实现多位显示。
通过控制不同位数的数码管,可以显示更多的数字或符号。
本实验使用的是四位数码管,可以同时显示四个数字。
通过编写程序,可以实现四位数码管的多位显示,例如显示当前时间、温度等信息。
实验五:数码管的亮度调节数码管的亮度可以通过改变驱动电路中的电阻值来实现。
本实验通过改变电阻值,调节数码管的亮度。
实验中通过编写程序,通过按键控制数码管的亮度增加和减少,从而实现亮度的调节。
结论:通过本次实验,我们深入了解了数码管的原理和工作方式。
数码管可以通过驱动电路的控制,实现数字和符号的显示。
同时,数码管还可以实现多位显示和亮度调节。
数码管作为一种常见的数字显示装置,具有广泛的应用前景,可以应用于各种电子设备中。
通过进一步的研究和实践,我们可以更好地利用数码管的功能,满足不同应用场景的需求。
(整理)单片机C语言程序设计实训100例
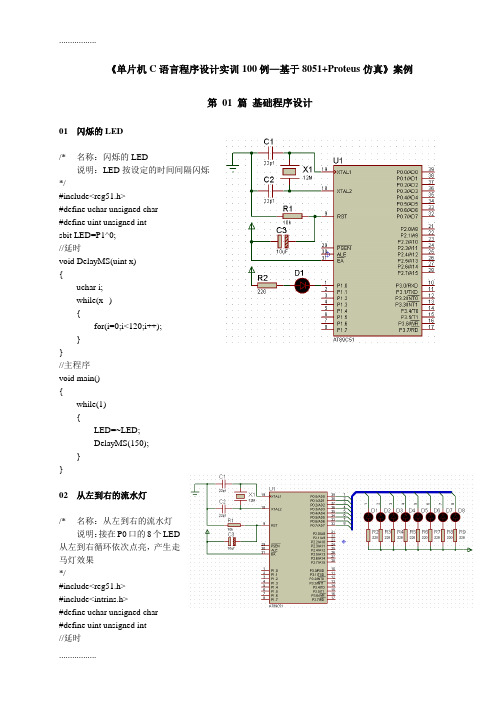
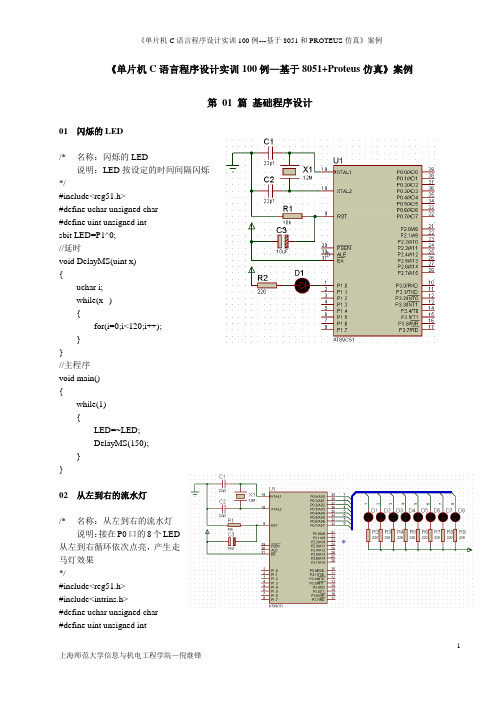
《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intvoid DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++)P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
《单片机C语言程序设计实训100例—基于8051+Proteus仿真
《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计01 闪烁的LED/* 名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P1^0;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02 从左到右的流水灯/* 名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}03 8只LED左右来回点亮/* 名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++){P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04 花样流水灯/* 名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05 LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
单只数码管循环显示0~9
单只数码管循环显示0-9报告设计题目:单只数码管循环显示0~9设计要求:单片机控制1只数码管,循环显示0~9需求分析:本设计要求单只数码管循环显示0~9,这里采用的是共阴极数码管。
让数码管显示数字的步骤为:1)使数码管的公共端接地(共阴极)上。
2)将显示码送到单片机的P0口,向数码管的各个段输出不同的电平,使单个数码管循环显示0-9这10个数字。
复位电路:在上电或复位过程中,控制CPU的复位状态:这段时间让CPU保持复位状态,而不是一上电或刚复位完毕就工作,防止CPU发出错误的指令、执行错误操作,也可以提高电磁兼容性能。
无论用户使用哪种类型的单片机,总要涉及到单片机复位电路的设计。
而单片机复位电路设计的好坏,直接影响到整个系统工作的可靠性。
许多用户在设计完单片机系统,并在实验室调试成功后,在现场却出现了“死机”、“程序走飞”等现象,这主要是单片机的复位电路设计不可靠引起的。
基本的复位方式单片机在启动时都需要复位,以使CPU及系统各部件处于确定的初始状态,并从初态开始工作。
89系列单片机的复位信号是从RST引脚输入到芯片的施密特触发器中的。
当系统处于正常工作状态时,且振荡器稳定后,如果RST引脚上有一个高电平并维持2个机器周期(24个振荡周期)以上,则CPU就可以响应并将系统复位。
设计原理:一、数码管显示原理我们最常用的是七段式和八段式LED数码管,八段比七段多了一个小数点,其他的基本相同。
所谓的八段就是指数码管里有八个小LED发光二极管,通过控制不同的LED的亮灭来显示出不同的字形。
数码管又分为共阴极和共阳极两种类型,其实共阴极就是将八个LED的阴极连在一起,让其接地,这样给任何一个LED的另一端高电平,它便能点亮。
而共阳极就是将八个LED的阳极连在一起。
其原理图如下。
其中引脚图的两个COM端连在一起,是公共端,共阴数码管要将其接地,共阳数码管将其接正5伏电源。
一个八段数码管称为一位,多个数码管并列在一起可构成多位数码管,它们的段选线(即a,b,c,d,e,f,g,dp)连在一起,而各自的公共端称为位选线。
单片机C语言程序设计实训100例——基于8051+Proteus仿真(前25题)

单片机C语言程序设计实训100例——基于8051+ Proteus仿真01 闪烁的LED/*名称:闪烁的LED说明:LED按设定的时间间隔闪烁*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intsbit LED=P10;//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){while(1){LED=~LED;DelayMS(150);}}02从左到右的流水灯/*名称:从左到右的流水灯说明:接在P0口的8个LED从左到右循环依次点亮,产生走马灯效果*/#include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){P0=0xfe;while(1){P0=_crol_(P0,1); //P0的值向左循环移动DelayMS(150);}}038只LED左右来回点亮/*名称:8只LED左右来回点亮说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/ #include<reg51.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned int//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;P2=0x01;while(1){for(i=0;i<7;i++){P2=_crol_(P2,1); //P2的值向左循环移动DelayMS(150);}for(i=0;i<7;i++){P2=_cror_(P2,1); //P2的值向右循环移动DelayMS(150);}}}04花样流水灯/*名称:花样流水灯说明:16只LED分两组按预设的多种花样变换显示*/#include<reg51.h>#define uchar unsigned char#define uint unsigned intuchar code Pattern_P0[]={0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00, 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe, 0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};uchar code Pattern_P2[]={0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf9,0xf3,0xe7,0xcf,0x9f,0x3f,0xff,0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff,0xe7,0xc3,0x81,0x00,0x81,0xc3,0xe7,0xff, 0xaa,0x55,0x18,0xff,0xf0,0x0f,0x00,0xff,0xf8,0xf1,0xe3,0xc7,0x8f,0x1f,0x3f,0x7f,0x7f,0x3f,0x1f,0x8f,0xc7,0xe3,0xf1,0xf8,0xff,0x00,0x00,0xff,0xff,0x0f,0xf0,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f,0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfc,0xf8,0xf0,0xe0,0xc0,0x80,0x00,0x00,0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00,0xff};//延时void DelayMS(uint x){uchar i;while(x--){for(i=0;i<120;i++);}}//主程序void main(){uchar i;while(1){ //从数组中读取数据送至P0和P2口显示for(i=0;i<136;i++){P0=Pattern_P0[i];P2=Pattern_P2[i];DelayMS(100);}}}05LED模拟交通灯/* 名称:LED模拟交通灯说明:东西向绿灯亮若干秒,黄灯闪烁5次后红灯亮,红灯亮后,南北向由红灯变为绿灯,若干秒后南北向黄灯闪烁5此后变红灯,东西向变绿灯,如此重复。
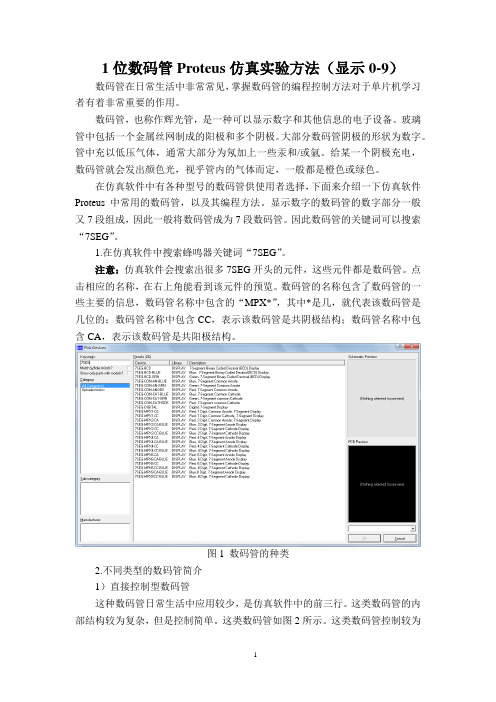
1位数码管Proteus仿真实验方法
MAIN: MOV R0,#0 MOV DPTR,#TABLE MAIN1: MOV A,R0 MOVC A,@A+DPTR MOV P2,A CALL DELAY INC R0 CJNE R0,#10,MAIN1 MOV R0,#0 JMP MAIN
DELAY: MOV R2,#20 X2:MOV R3,#40 X1:MOV R4,#250 DJNZ R4,$ DJNZ R3,X1 DJNZ R2,X2 RET
TABLE: DB 0C0H, 0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H END 通过对比上述两个程序,可以发现,其实第二个程序没有第一个程序短太多, 但是第二个程序的拓展性比第一个程序好,只要修改程序中的几个参数,程序行 没有增加,就可以将显示内容修改为 0-9、A-F。而程序 1 如果想实现相同的功 能,只能继续增加程序行。因此在进行编程的时候,一定要根据程序的特点,选 择不同的编程形式,选择了恰当的编程形式,能够很大程度上的简化程序。 也可以使用 C 语言进行编程,其编程思路与汇编语言类似,这里不再赘述。 参考程序如下: #include <reg52.h> #define uchar unsigned char
DELAY: MOV R2,#20 X2:MOV R3,#40 X1:MOV R4,#250 DJNZ R4,$ DJNZ R3,X1 DJNZ R2,X2 RET
END 这种编程方法的优点是,程序简单,适合新手使用。程序修改容易,可以直 接进行任意修改以及增加。其缺点是程序冗长,显示内容较多时,程序书写工作 量大。 另外一种编程方法是查表发,将需要显示的内容预先写入单片机片内 ROM 中,当需要哪个段码直接从 ROM 中读取,并送至 I/O 口进行显示。这种方法编 写的程序较上述程序要简单很多。参考程序如下: ORG 0H JMP MAIN ORG 30H
单只数码管循环显示0~9
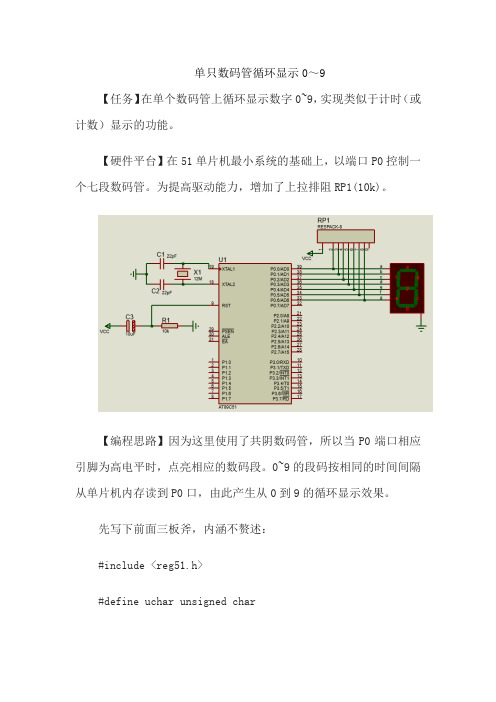
单只数码管循环显示0~9【任务】在单个数码管上循环显示数字0~9,实现类似于计时(或计数)显示的功能。
【硬件平台】在51单片机最小系统的基础上,以端口P0控制一个七段数码管。
为提高驱动能力,增加了上拉排阻RP1(10k)。
【编程思路】因为这里使用了共阴数码管,所以当P0端口相应引脚为高电平时,点亮相应的数码段。
0~9的段码按相同的时间间隔从单片机内存读到P0口,由此产生从0到9的循环显示效果。
先写下前面三板斧,内涵不赘述:#include <reg51.h>#define uchar unsigned char#define uint unsigned int因为0~9的段码是固定的,不妨将其保存为code类型的数组。
注意是共阴接法,比如要显示“0”,那么P0端口的各引脚电平为:a=b=c=d=e=f=1,g=0,闲置的P0.7=0(按字节给端口赋值,所以闲置位也赋值),表示为二进制是P0.7gfedcba=00111111,对应的十六进制为0x3F。
其余段码可类似分析:uchar code display_code[ ]={0x3F,0x06,0x5B,0x4F,0x66,0x66,0x6D,0x7D,0x7F,0x6F,0x00 }; //0x00表示段码全灭显示不同的数字之间要有时间间隔,须定义一个延时函数以便主函数调用实现间隔延时:最后编写主函数:【代码展示】#include <reg51.h>#define uchar unsigned char#define uint unsigned intuchar codedisplay_code[ ]={0x3F,0x06,0x5B,0x4F,0x66,0x66,0x6D,0x7D,0x 7F,0x6F,0x00};void delay(uint x){uchar i;while(x--) for(i=0;i<100;i++);}void main(){uchar i=0; //定义数组下标变量,用以遍历数组P0=0x00; //数码管初始不亮while(1){P0=display_code[i]; //0~9对应的段码送给P0口,显示9后段码熄灭(0x00)i=(i+1)%10;//从0循环到9,超过10后又回到0,%为取余数算符}}。
1位数码管的静态动态显示代码
1位数码管的静态动态显示代码1. 什么是1位数码管?1位数码管,也称为单位数码管,是一种用于显示数字的电子元件。
它由七段数码组成,七段分别代表数字的不同部分,通过对不同的段点亮或熄灭,可以显示任意数字。
2. 1位数码管的静态显示静态显示是指将数码管显示为固定的数字,不发生变化。
实现静态显示的最简单方法是使用开关电路和逻辑门电路。
以下是一种常见的静态显示电路:1.使用开关电路控制:将数码管的七个段分别连接到对应的开关上,通过打开或关闭开关,来控制每个段的点亮或熄灭状态。
2.使用逻辑门电路控制:将数码管的七个段分别连接到逻辑门电路的输入端,通过逻辑门的组合及输入信号的控制,来控制每个段的点亮或熄灭状态。
通过上述电路的控制,可以将数码管的显示固定为特定数字,实现静态显示的效果。
3. 1位数码管的动态显示动态显示是指将数码管显示为一组数字的连续变化,通常用于显示时间、计数等功能。
要实现动态显示,需要通过定时器或计数器等设备来控制信号的变化。
以下是一种常见的动态显示电路:1.使用定时器控制:将数码管的七个段分别连接到定时器的输出端,通过设定定时器的周期和频率,可以控制数码管的显示更新速率。
2.使用计数器控制:将数码管的七个段分别连接到计数器的输出端,通过计数器的计数功能,可以控制数码管显示的数字。
通过对定时器或计数器的设置,可以实现数码管的动态显示,数字可以按照一定的顺序进行变化,从而实现不同的功能。
4. 1位数码管的控制代码下面是一个示例的Arduino控制代码,用于实现1位数码管的静态和动态显示:// 定义数码管的七个段引脚int segA = 2;int segB = 3;int segC = 4;int segD = 5;int segE = 6;int segF = 7;int segG = 8;// 定义数码管的四个位引脚int digit1 = 9;int digit2 = 10;int digit3 = 11;int digit4 = 12;// 定义数码管显示的数字int num = 0;// 数码管数字的对应状态int numbers[10][7] = {{1, 1, 1, 1, 1, 1, 0}, // 数字0{0, 1, 1, 0, 0, 0, 0}, // 数字1{1, 1, 0, 1, 1, 0, 1}, // 数字2{1, 1, 1, 1, 0, 0, 1}, // 数字3{0, 1, 1, 0, 0, 1, 1}, // 数字4{1, 0, 1, 1, 0, 1, 1}, // 数字5{1, 0, 1, 1, 1, 1, 1}, // 数字6{1, 1, 1, 0, 0, 0, 0}, // 数字7{1, 1, 1, 1, 1, 1, 1}, // 数字8{1, 1, 1, 0, 0, 1, 1} // 数字9};void setup() {// 配置数码管引脚为输出模式pinMode(segA, OUTPUT);pinMode(segB, OUTPUT);pinMode(segC, OUTPUT);pinMode(segD, OUTPUT);pinMode(segE, OUTPUT);pinMode(segF, OUTPUT);pinMode(segG, OUTPUT);pinMode(digit1, OUTPUT);pinMode(digit2, OUTPUT);pinMode(digit3, OUTPUT);pinMode(digit4, OUTPUT);}void loop() {// 数码管静态显示digitalWrite(segA, numbers[num][0]);digitalWrite(segB, numbers[num][1]);digitalWrite(segC, numbers[num][2]);digitalWrite(segD, numbers[num][3]);digitalWrite(segE, numbers[num][4]);digitalWrite(segF, numbers[num][5]);digitalWrite(segG, numbers[num][6]);digitalWrite(digit1, HIGH);digitalWrite(digit2, LOW);digitalWrite(digit3, LOW);digitalWrite(digit4, LOW);delay(1000); // 延时1秒// 数码管动态显示for (int i = 0; i < 10; i++) {digitalWrite(segA, numbers[i][0]);digitalWrite(segB, numbers[i][1]);digitalWrite(segC, numbers[i][2]);digitalWrite(segD, numbers[i][3]);digitalWrite(segE, numbers[i][4]);digitalWrite(segF, numbers[i][5]);digitalWrite(segG, numbers[i][6]);digitalWrite(digit1, LOW);digitalWrite(digit2, HIGH);digitalWrite(digit3, LOW);digitalWrite(digit4, LOW);delay(500); // 延时0.5秒}}上述代码首先定义了数码管的引脚和显示的数字,然后在setup()函数中配置引脚为输出模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单只数码管循环显示0-9
报告
设计题目:单只数码管循环显示0~9
设计要求:单片机控制1只数码管,循环显示0~9
需求分析:本设计要求单只数码管循环显示0~9,这里采用的是共阴极数码管。
让数码管显示数字的步骤为:
1〕使数码管的公共端接地(共阴极〕上。
2〕将显示码送到单片机的P0口,向数码管的各个段输出不同的电平,使单个数码管循环显示0-9这10个数字。
复位电路:
在上电或复位过程中,控制
CPU的复位状态:这段时间内
让CPU保持复位状态,而不是
一上电或刚复位完毕就工作,
防止CPU发出错误的指令、执
行错误操作,也可以提高电磁
兼容性能。
无论用户使用哪种类型的单片
机,总要涉及到单片机复位电
路的设计。
而单片机复位电路
设计的好坏,直接影响到整个
系统工作的可靠性。
许多用户
在设计完单片机系统,并在实
验室调试成功后,在现场却出
现了“死机〞、“程序走飞〞等
现象,这主要是单片机的复位
电路设计不可靠引起的。
基本的复位方式
单片机在启动时都需要复位,以使CPU及系统各部件处于确定的初始状态,并从初态开始工作。
89系列单片机的复位信号是从RST引脚输入到芯片内的施密特触发器中的。
当系统处于正常工作状态时,且振荡器稳定后,如果RST引脚上有一个高电平并维持2个机器周期(24个振荡周期)以上,那么CPU就可以响应并将系统复位。
设计原理:
一、数码管显示原理
我们最常用的是七段式和八段式LED数码管,八段比七段多了一个小数点,其他的基本相同。
所谓的八段就是指数码管里有八个小LED发光二极管,通过控制不同的LED的亮灭来显示出不同的字形。
数码管又分为共阴极和共阳极两种类型,其实共阴极就是将八个LED的阴极连在一起,让其接地,这样给任何一个LED的另一端高电平,它便能点亮。
而共阳极就是将八个LED的阳极连在一起。
其原理图如下。
其中引脚图的两个COM端连在一起,是公共端,共阴数码管要将其接地,共阳数码管将其接正5伏电源。
一个八段数码管称为一位,多个数码管并列在一起可构成多位数码管,它们的段选线〔即a,b,c,d,e,f,g,dp〕连在一起,而各自的公共端称为位选线。
显示时,都从段选线送入字符编码,而选中哪个位选线,那个数码管便会被点亮。
数码管的8段,对应一个字节的8位,a对应最低位,dp对应最高位。
所以如果想让数码管显示数字0,那么共阴数码管的字符编码为00111111,即0x3f;共阳数码管的字符编码为11000000,即0xc0。
可以看出两个编码的各位正好相反。
共阳极的数码管0~f的段编码是这样的:
unsigned char code table[]={ //共阳极0~f数码管编码
0xc0,0xf9,0xa4,0xb0,//0~3
0x99,0x92,0x82,0xf8,//4~7
0x80,0x90,0x88,0x83,//8~b
0xc6,0xa1,0x86,0x8e //c~f
};
共阴极的数码管0~f的段编码是这样的:
unsigned char code table[]={//共阴极0~f数码管编码
0x3f,0x06,0x5b,0x4f, //0~3
0x66,0x6d,0x7d,0x07, //4~7
0x7f,0x6f,0x77,0x7c, //8~b
0x39,0x5e,0x79,0x71 //c~f
};
二、驱动方式
静态显示驱动:
静态驱动也称直流驱动。
静态驱动是指每个数码管的每一个段码都由一个单片机的I/O 脚进行驱动,或者使用如BCD码二-十进位*器*进行驱动。
静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O脚多,如驱动5个数码管静态显示那么需要5×8=40根I/O脚来驱动,故实际应用时必须增加*驱动器进行驱动,增加了硬体电路的复杂性。
、由于单片机的IO口的驱动能力有限,而数码管点亮时需要较大的电流,所以在用单片机构成数码管显示系统时,需要增加驱动电路来输出较大的电流,驱动电路如下列图
设计原理图:
程序流程图:
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,
0x6d,0x7d,0x07,0x7f,0x6f}; //0-9的字符码void delay(uint z) //延时函数,以毫秒为单位。
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void main()
{
while(1)
{
uint i;
for(i=0;i<10;i++)//循环显示0-9
{
P0=table[i]; //依次送入0-9的字符码
delay(500); //延时500毫秒,调用延时函数。
}
}
}
结论与心得
本次设计要求比拟简单,做起来较容易一些。
但在实际过程中也遇到了一些问题,首先是仿真时的连线,看似简单,却很容易连错,致使数码管某一段不能发光。
再有就是KEIL与PROTEUS7.5的联合使用,调试程序时一定要生成HEX文件。
通过单片机课程设计,我不仅加深了对单片机理论的理解,将理论很好地应用到实际当中去,而且还学会了了两种有用的软件。
我做的这个设计主要是用AT89C51这个芯片来实现,这个芯片具有很多优点,程序简单易读,结构清楚,最重要的是本钱低。
很适合我们学生用来学生。
在做这个设计的过程中,我也了解到了自己的缺乏,在日后的学习中,我还需加倍努力学习。