堆垛机工作原理
堆垛机钢丝绳的绕法

堆垛机钢丝绳的绕法堆垛机是一种用于搬运物料的机械设备,其主要工作原理是通过利用钢丝绳的力量来提升和下降货物。
钢丝绳在堆垛机中起着非常重要的作用,它需要正确地绕在机架和鼓轮上,以确保堆垛机的正常运行和货物的安全。
下面将介绍一些关于堆垛机钢丝绳绕法的内容,以帮助大家更好地理解并正确操作。
一、钢丝绳的选择1. 强度要求:堆垛机钢丝绳需要具备足够的强度,以承受货物的重量和运行时的冲击力。
根据具体情况,可以选择不同强度等级的钢丝绳。
2. 耐磨性:由于堆垛机的工作环境较为恶劣,钢丝绳需要具备良好的耐磨性,以延长使用寿命并减少维修次数。
3. 抗腐蚀性:如果堆垛机作业环境中存在腐蚀性气体或液体,钢丝绳应具备一定的抗腐蚀性能,以防止锈蚀和断裂。
二、钢丝绳的绕法1. 检查机架和鼓轮:在绕钢丝绳之前,需要仔细检查堆垛机的机架和鼓轮,确保其表面平整、无明显的磨损或变形。
如果有异常情况,应及时修理或更换。
2. 钢丝绳的放线:将钢丝绳的一端通过机架上的绳槽或固定孔穿过,然后依次绕在鼓轮上。
绕绳时应注意保持绳线间的张力均匀,不可出现松紧不一的情况。
3. 绳绕的圈数:钢丝绳的绕法应根据堆垛机的额定载荷和设计要求来确定。
通常情况下,绕绳的圈数越多,绳线与鼓轮之间的接触面积越大,抗磨性能越好。
4. 绳绕的方向:钢丝绳的绕法方向应与鼓轮的旋转方向一致,确保绳线在施力时不会产生过大的摩擦力,从而降低绳线的磨损程度。
5. 钢丝绳的紧固:绕好钢丝绳后,需要用专用的绳夹或压绳环将钢丝绳的两端固定住,确保不会出现松动或脱落的情况。
同时,还要检查绳夹或压绳环的紧固程度,以防止松动。
三、钢丝绳的维护和保养1. 定期检查:定期检查钢丝绳的磨损程度和断裂情况,如有问题及时更换。
2. 去除杂质:堆垛机钢丝绳容易被灰尘、油污等杂质污染,应定期清洗和除尘,保持绳线的表面清洁。
3. 防止过弯:堆垛机钢丝绳在弯曲处容易产生应力集中,可能导致绳线断裂。
因此,在绕绳时应尽量避免过弯,确保绳线在机构中的运动平稳。
物流配送中心的有轨巷道式堆垛机

、 机 械 ,屉 随 体 仓 库的 m 现 而 发展 起 来的 专 用 起厦 l k 机 竹轨 巷遭堆 垛 机心 过运 行 机构 、 升机 卡 起 句和货 义的 嗣 r ,完 成 货物在 货架 范 周 内的纵 向 和横 向 移动 , 作
装 有导 向轮 它 的 I 安装滑 轮或 链轮 机构 、 l水平 导 24 载 货 台 部 : . 轮、 电缆拖 抟机 构或滑 触线 供电装 髓 中部 或下 部盛裟 起 载货 台 足堆 垛 机承 接 贷物 并进 行 升降 运动 的 部件 . 升机 掬 . + 内侧 安桂 州 峁导轨 . 使载 货台平 稳地 卜升及 魁 垂 直吊架 和水 斗结 构 州部分 牢 地 焊接 成 的结 构 £ F降 外 侧犍 有维修 爬梯便 维修 . 下部安 黻 毒莉及 被 动 乍轮 、 行 蛾 动牲 坦 及 F水平 导轮 、 冲 器等 部件 运 缓 件 , 【 有 货义 伸缩 机 构 绳过 载 干断 绳 安伞 装酋 装 松 n 升降动滑 轮 、1 ,降 向轮相I 导轮 删向 后 部和 侧曩 犍有 电 器拄删 机 I 1 F 终端 限位 开 25 货 又 及 降 7 . 关 和选J 认址板 等翻 件 5 货 艾魁堆垛 机 存取 货物 的执 行机构 ,犍 【 于载 货 台 5 } ;
安 全保 护装 置构 成
21 机 . 榘
起升 机构 用 以驱 动载 货 台 }升及下 降。起 升机 构 :
婴F电机 减速 器 、 h 驱动链 轮 动链 条 驱 升降链 轮 、 升降链
堆垛 机的机 架 足m 、桩 I 槊 、 ) . : 横 下横繁组 成 的 f方 条 、 ∈ 配重 块等组 成 升降链 条 虢货 台相 连接 . 升降链 与 形结 构框 架 . 垛 tt书器 取载 构件 为 r俺干 安城零 轮 F磺梁 的健轮披 裁货 台组成 封闭结 构 电机 减速机 足 t , ' J 件 和减 轻堆 垛机 露镀 .I、 横 粱 用榴 制制 作 , 杜 用 力 F 通 过冁动 链轮 带动 升降链 轮 旋转 .升降 链轮再 通 过7 降 1 通 制作 机架 沿 灭轨运 行 , 为防 J框架 倾倒 , I 梁 f I 在 : 横 链 条带动 城货 台 F运动
基于PLC的堆垛机控制系统设计
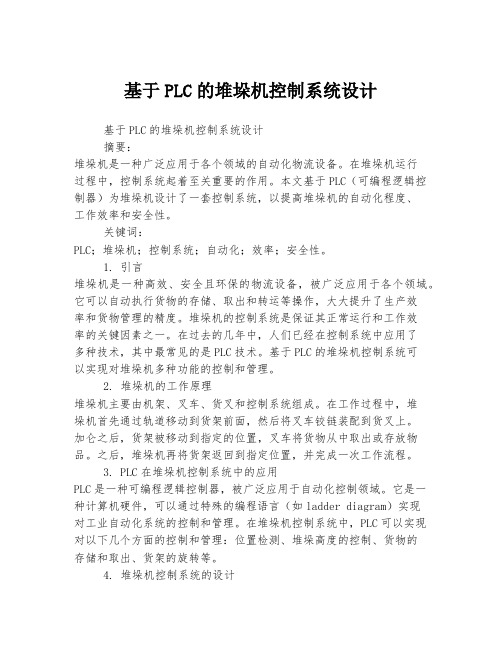
基于PLC的堆垛机控制系统设计基于PLC的堆垛机控制系统设计摘要:堆垛机是一种广泛应用于各个领域的自动化物流设备。
在堆垛机运行过程中,控制系统起着至关重要的作用。
本文基于PLC(可编程逻辑控制器)为堆垛机设计了一套控制系统,以提高堆垛机的自动化程度、工作效率和安全性。
关键词:PLC;堆垛机;控制系统;自动化;效率;安全性。
1. 引言堆垛机是一种高效、安全且环保的物流设备,被广泛应用于各个领域。
它可以自动执行货物的存储、取出和转运等操作,大大提升了生产效率和货物管理的精度。
堆垛机的控制系统是保证其正常运行和工作效率的关键因素之一。
在过去的几年中,人们已经在控制系统中应用了多种技术,其中最常见的是PLC技术。
基于PLC的堆垛机控制系统可以实现对堆垛机多种功能的控制和管理。
2. 堆垛机的工作原理堆垛机主要由机架、叉车、货叉和控制系统组成。
在工作过程中,堆垛机首先通过轨道移动到货架前面,然后将叉车铰链装配到货叉上。
加仑之后,货架被移动到指定的位置,叉车将货物从中取出或存放物品。
之后,堆垛机再将货架返回到指定位置,并完成一次工作流程。
3. PLC在堆垛机控制系统中的应用PLC是一种可编程逻辑控制器,被广泛应用于自动化控制领域。
它是一种计算机硬件,可以通过特殊的编程语言(如ladder diagram)实现对工业自动化系统的控制和管理。
在堆垛机控制系统中,PLC可以实现对以下几个方面的控制和管理:位置检测、堆垛高度的控制、货物的存储和取出、货架的旋转等。
4. 堆垛机控制系统的设计4.1系统硬件设计本文所设计的堆垛机控制系统由PLC、人机界面、伺服控制器、以及传感器等部分组成。
PLC通过人机界面与用户进行通信,同时获取传感器检测到的信号和工况数据,并将其转化为控制信号。
伺服控制器用来控制堆垛机电机的转速和扭矩。
最后,传感器是通过获取物体位置和变化等信息,向PLC发送控制信号。
4.2系统软件设计本文所设计的堆垛机控制系统使用了三层架构模式。
立体库操作使用手册1

自动化立体库使用手册(堆垛机)第一章立体仓库注意事项1、操作堆垛机前,请仔细阅读立体库操作使用手册或经过指导后再进行;2、堆垛机(上位机)开启之前,空压机一定要打开,直到保压,才允许操作堆垛机进行入库操作,否则货叉会叉坏托盘和线体;3、禁止手工存取立体仓货物;4、入出库作业时,禁止实训人员靠近或进入立体仓库和轨道巷道内;立体库周围请勿靠太近,至少保持0.5m距离;5、入出库作业时,禁止实训人员用手去遮挡入库、出口或分拣口顶升平移机的感应设备;6、堆垛机上有三个状态:手工状态、半自动状态、自动状态,前两个状态仅供调试或维护人员使用,若擅自使用,后果自负,实训时,确认为自动状态;7、堆垛机为自动状态,存取操作由堆垛机直接进行,遇紧急情况或故障时,按上位机界面上的急停按钮或输送线电控柜上的全线停止按钮,同样有急停的效果。
8、每半年对全线进行调整检修。
非专业人员请勿随便进行拆卸检修。
第二章立体仓库原理及说明第一节立体仓库组成1、自动化立体仓库主要由:多个立体仓库货位、上位机、入库及出库辊道、多个顶升平移机、自动分拣线及多个分拣口组成,入库及出库辊道分别安装于立体仓库的两侧。
2、入库辊道由电控柜面板上的旋钮直接控制启停,在入库辊道前端装有入库检测的光电开关,当托盘行走到端头时,堆垛机允许进行入库操作(详见堆垛机部分操作),在进行入库叉货前,入库辊道自动停止并将顶升动作后,货叉开始叉货,直到货物离开辊道后,继续转动;3、出库辊道由程序控制启停,当出库时,堆垛机前进到位后,将货叉到辊道上方后,出库处顶升动作接住托盘,等货叉完全离开辊道上方时,顶升下降,同时出库辊道运转,将托盘送到出库辊道前端的顶升处。
同时要满足出库顶升移行机不占位、出库位有托盘等条件才能运行。
第二节堆垛机系统堆垛机系统与地面输送线系统是个相对独立的。
该系统主要由搬送货物的堆垛机(上位机)和带有120个货位的双巷道立体库组成,其中堆垛机主要由巷道方向电机、升降方向电机及货叉电机部分组成,其中各电机带有变频及制动功能达到精确定位效果。
堆垛机国外发展现状及未来趋势分析

日本在堆垛机的设计、制造、技 术研发方面处于领先地位,拥有
许多著名的堆垛机品牌。
日本堆垛机的发展趋势是向着高 效、智能、环保方向发展,同时 注重人性化设计,提高操作人员
的舒适度和安全性。
其他发达国家堆垛机发展现状
其他发达国家如加拿大、澳大利亚等也拥有先 进的物流装备技术和完善的物流系统,堆垛机 在这些国家得到了广泛的应用。
德国和美国是欧美地区堆垛机的主要生产国家,两国在堆垛机技术研发和产品创新 方面处于领先地位。
欧美地区堆垛机的发展趋势是向着高效、智能、绿色方向发展,同时与物联网、人 工智能等技术深度融合,提升物流系统的智能化水平。
日本堆垛机发展现状
日本是一个物流装备技术发达的 国家,堆垛机在日本得到了广泛
的应用。
环保和可持续性成为堆垛机发展的重要趋势,采用节能机的安全性能得到越来越多的关注,通过采用安全防护装 置和预警系统等措施提高安全性。
对我国堆垛机产业发展的启示与建议
技术创新
加强技术创新和研发能力,推 动我国堆垛机产业向高端化、
智能化方向发展。
人才培养
加强堆垛机领域的人才培养和 引进,培养一批具备专业技能 和创新精神的人才。
国内外堆垛机市场的现状与差异分析
欧洲和北美市场
这些地区的工业自动化发展较早,堆垛机技术相对成熟, 设备性能稳定可靠,且拥有较高的市场占有率。
日本市场
日本作为工业机器人强国,堆垛机技术发展迅速,设备性 能和可靠性均处于世界领先水平,且拥有较为完善的产业 链。
中国市场
中国作为世界制造业大国,近年来堆垛机市场需求持续增 长,但整体技术水平与发达国家仍存在一定差距,且市场 主要集中在中低端领域。
拓展应用范围
借助人机协作,拓展堆垛 机的应用范围,适应更多 场景。
堆取料机工作原理
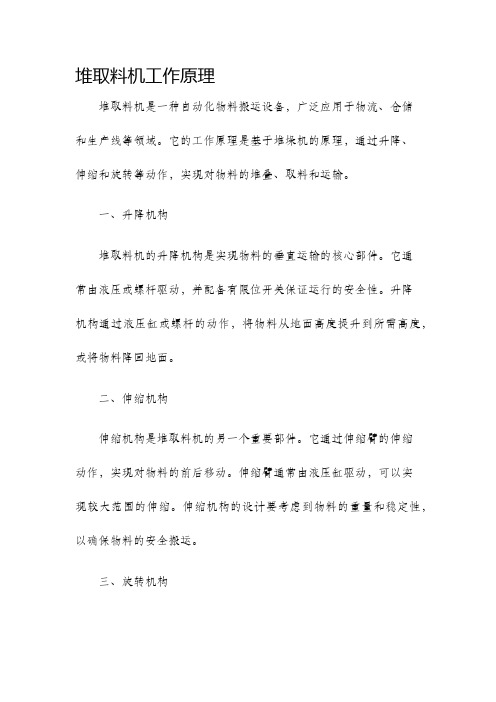
堆取料机工作原理堆取料机是一种自动化物料搬运设备,广泛应用于物流、仓储和生产线等领域。
它的工作原理是基于堆垛机的原理,通过升降、伸缩和旋转等动作,实现对物料的堆叠、取料和运输。
一、升降机构堆取料机的升降机构是实现物料的垂直运输的核心部件。
它通常由液压或螺杆驱动,并配备有限位开关保证运行的安全性。
升降机构通过液压缸或螺杆的动作,将物料从地面高度提升到所需高度,或将物料降回地面。
二、伸缩机构伸缩机构是堆取料机的另一个重要部件。
它通过伸缩臂的伸缩动作,实现对物料的前后移动。
伸缩臂通常由液压缸驱动,可以实现较大范围的伸缩。
伸缩机构的设计要考虑到物料的重量和稳定性,以确保物料的安全搬运。
三、旋转机构旋转机构用于实现堆取料机的旋转运动。
堆取料机可以通过旋转机构将物料从一个位置转移到另一个位置,以满足物料堆叠和取料的需求。
旋转机构通常由电动机、齿轮和传动机构组成,能够实现平稳的旋转运动。
四、控制系统堆取料机的控制系统负责对整个设备进行控制和监控。
它通常由PLC控制器和人机界面组成。
PLC控制器负责对各个机构的动作进行控制,实现自动化的物料搬运过程。
人机界面可以由操作员进行设定和监控,以确保设备的正常运行。
堆取料机的工作流程如下:首先,操作员通过人机界面设置好物料的堆叠和取料参数。
然后,堆取料机根据设定的参数,将升降、伸缩和旋转机构进行相应的动作。
接下来,堆取料机的升降机构将物料提升到设定的高度,伸缩机构将物料移动到目标位置,然后通过旋转机构将物料堆叠或取出。
最后,堆取料机将完成一次物料的堆叠或取料操作,可以根据需要进行循环操作,以满足连续的物料搬运需求。
堆取料机的工作原理和设计考虑了物料堆叠和取料的安全性和效率。
通过自动化的升降、伸缩和旋转动作,可以减少人工操作的介入,提高物料搬运的效率和准确性。
同时,设备配备有安全限位开关和防护装置,确保操作员和设备的安全。
总结堆取料机是一种自动化物料搬运设备,利用升降、伸缩和旋转机构,实现物料的堆叠、取料和运输。
堆垛机安全钳原理

堆垛机安全钳原理堆垛机安全钳是一种机械保护装置,广泛应用于物流仓库、自动化生产线和航空等领域。
它的作用是保护堆垛机在运行过程中不会碰撞运输车、货物或其他障碍物,从而降低意外事故的发生率,保障人员的安全。
本文将介绍堆垛机安全钳的原理、构造和工作原理。
1.1 堆垛机安全钳的作用堆垛机安全钳主要是用来控制堆垛机在运行中的安全距离和最大行程,它的作用可以概括为以下几个方面:(1) 保护运输车和货物堆垛机安全钳可以监控每个堆垛机的运行轨迹,一旦出现行驶路线有运输车、货物、围栏等障碍物时,安全钳就会自动刹车或关闭马达,从而避免碰撞。
(2) 保护人员安全堆垛机在运行时,由于速度较快且运动轨迹不稳定,容易造成人员走动时的误伤或伤害,但是安全钳的存在就可以有效地保护人员在堆垛机运行时的安全。
(3) 提高生产效率堆垛机安全钳的存在可以提高堆垛机的运行效率和稳定性,减少停机时间和费用,提高生产效率和效益。
堆垛机安全钳一般由控制系统、传感器、电子元件和钳爪等构成,下面分别介绍这些部分的内容:(1) 控制系统控制系统是堆垛机安全钳的核心部分,它可以侦测并监视堆垛机的轨迹和行驶路线,一旦出现异常情况,控制系统就会发送信号给其他元件,从而实现自动刹车机车的作用。
(2) 传感器传感器是堆垛机安全钳的重要组成部分,一般安装在堆垛机的驾驶仓和钳爪部位,可以实现对机车位置、行驶方向、轮轴和行程的监控。
(3) 电子元件电子元件是堆垛机安全钳的电力传输和自动化控制系统的关键部分,包括控制器、传感器、显示器、信号处理器等,以及预编程器和工业计算机等高级自动化设备。
(4) 钳爪钳爪是堆垛机安全钳的输出部分,一般用来控制机车运动和停止。
钳爪可以分为横向和纵向两种,用来刹车或制动堆垛机的动力,从而保证堆垛机在行驶过程中的安全。
堆垛机安全钳主要通过监控系统来实现对堆垛机的轨迹和行驶路线的监控。
每个堆垛机的硬件设备都包括不同种类的传感器和控制器。
这些设备可以追踪悬挂物与机车的距离,以及多种附加资料,如运动方向、速度和存储容量。
自动化立体仓库堆垛机的设计
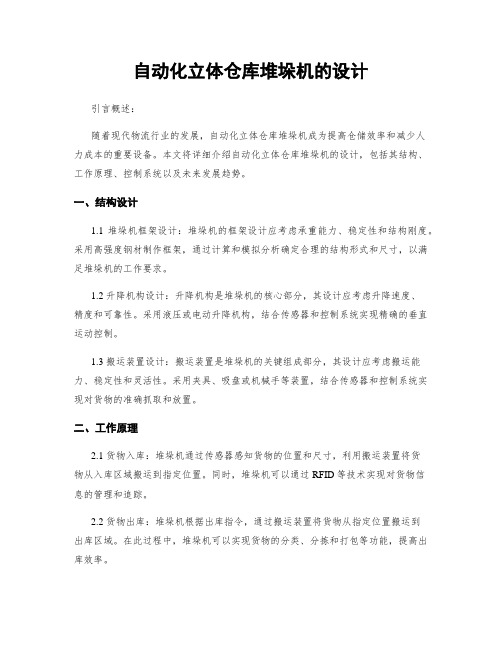
自动化立体仓库堆垛机的设计引言概述:随着现代物流行业的发展,自动化立体仓库堆垛机成为提高仓储效率和减少人力成本的重要设备。
本文将详细介绍自动化立体仓库堆垛机的设计,包括其结构、工作原理、控制系统以及未来发展趋势。
一、结构设计1.1 堆垛机框架设计:堆垛机的框架设计应考虑承重能力、稳定性和结构刚度。
采用高强度钢材制作框架,通过计算和模拟分析确定合理的结构形式和尺寸,以满足堆垛机的工作要求。
1.2 升降机构设计:升降机构是堆垛机的核心部分,其设计应考虑升降速度、精度和可靠性。
采用液压或电动升降机构,结合传感器和控制系统实现精确的垂直运动控制。
1.3 搬运装置设计:搬运装置是堆垛机的关键组成部分,其设计应考虑搬运能力、稳定性和灵活性。
采用夹具、吸盘或机械手等装置,结合传感器和控制系统实现对货物的准确抓取和放置。
二、工作原理2.1 货物入库:堆垛机通过传感器感知货物的位置和尺寸,利用搬运装置将货物从入库区域搬运到指定位置。
同时,堆垛机可以通过RFID等技术实现对货物信息的管理和追踪。
2.2 货物出库:堆垛机根据出库指令,通过搬运装置将货物从指定位置搬运到出库区域。
在此过程中,堆垛机可以实现货物的分类、分拣和打包等功能,提高出库效率。
2.3 堆垛操作:堆垛机可以根据货物的尺寸和重量,自动进行堆垛操作。
通过搬运装置的升降和伸缩,实现对货物的垂直和水平堆垛,最大限度地利用仓库空间。
三、控制系统3.1 传感器系统:堆垛机通过激光传感器、摄像头等设备实时感知货物的位置、尺寸和形状,为后续的搬运操作提供准确的数据支持。
3.2 控制算法:堆垛机的控制算法应考虑货物的优化堆垛路径、搬运速度和安全性。
采用智能控制算法,结合实时反馈信息,实现对堆垛机运动轨迹的精确控制。
3.3 通信系统:堆垛机通过与仓库管理系统的通信,实现对货物信息的交互和共享。
通过云平台和物联网技术,实现对堆垛机的远程监控和管理。
四、未来发展趋势4.1 智能化:未来的自动化立体仓库堆垛机将更加智能化,通过机器学习和人工智能技术,实现对货物的自动分类、分拣和打包。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
堆垛机工作原理
堆垛机是一种用于自动化货物垂直存储和取货的设备。
其工作原理如下:
1. 飞叉或伸缩臂:堆垛机的最关键部分是飞叉或伸缩臂,它们负责将货物从储存区域中取出或放入货架。
飞叉/伸缩臂通常由电动马达驱动,具有上下运动和伸缩功能。
2. 控制系统:堆垛机的控制系统是其核心,通过控制系统可以实现堆垛机的自动化操作。
控制系统通常由计算机和传感器组成,它可以监测货物的位置和状态,并根据预设的指令控制飞叉/伸缩臂的运动。
3. 轨道系统:堆垛机通常安装在固定的轨道上,轨道可以是水平的也可以是倾斜的,以便堆垛机能够在不同高度的货架之间移动。
轨道系统也可以配备定位装置,以确保堆垛机的准确定位。
4. 载货平台:堆垛机通常配备有载货平台,用于搬运货物。
载货平台通常由托盘、夹具或其他固定装置组成,以确保货物在垂直运输过程中的稳定性和安全性。
在实际操作中,堆垛机的工作流程如下:
1. 接受命令:堆垛机通过控制系统接收来自操作员或上层系统的指令,包括存储、取货、重新排列货物等。
2. 轨道移动:堆垛机根据指令控制轨道系统移动到指定的货架位置。
3. 上下定位:堆垛机通过控制飞叉/伸缩臂的上下运动,将货叉准确定位到待存储或待取货的货物上方。
4. 储存/取货:堆垛机通过控制飞叉/伸缩臂的伸缩功能,将货物从货架上取下或把货物放入货架。
储存和取货操作通常需要准确的位置和高度控制,以确保货物的安全和稳定。
5. 检测和安全控制:堆垛机通过传感器检测货物位置和状态,并根据需要进行安全控制。
例如,在储存操作中,传感器可以检测到货物是否准确放置在指定位置上。
通过以上的工作原理和流程,堆垛机实现了货物的高效自动化存储和取货,提高了物流效率,并减少了人工操作的需求。