堆垛机控制方案
基于PLC的堆垛机控制系统设计
基于PLC的堆垛机控制系统设计摘要在现代的物流仓储系统中,自动化立体仓库应用日益广泛。
而堆垛机是立体仓库的关键组成部分,堆垛机性能的优劣对整个立体仓库的运行起到至关重要的作用,所以设计与开发自动化程度较高的堆垛机控制系统成为当前立体仓库的发展趋势,开展与此有关的研究具有重要的理论和应用价值。
本文基于现代物流技术的应用和发展要求,介绍自动化立体仓库的应用及其功能和作用,结合现代科技的发展,着重研究自动化立体仓库堆垛机控制系统的控制技术。
本文详细阐述了本控制系统的设计思想,以及整个系统的硬件实现和软件设计。
论文依据立体仓库的有关设计参数,对堆垛机电气控制的硬件系统进行了设计,为了提高堆垛机的性能,本文采用了转速、位置反馈的双闭环控制,以满足系统的调速要求。
系统的水平认址采用激光测距传感器定位,垂直认址采用光电开关和认址片组合定位。
变频调速系统由S7-200PLC及其扩展模块EM235通过变频器MM440控制交流电动机,采用光电编码器反馈转速信号,实现转速闭环控制。
货叉伸叉系统由S7-200PLC通过步进电动机驱动器SH-20403控制二相混合式步进电动机。
根据系统的控制要求进行了PLC、变频器、电机和电机驱动器的选型,并给出了系统的硬件接线图,然后利用西门子的编程软件step7设计了堆垛机控制程序。
关键词自动化立体仓库,堆垛机,PLCStacker control system design based on PLCAbstractIn modern logistics warehousing systems, automated storage is increasingly widespread. And stackers are the key equipments, performance of the stacker plays an important role. This paper introduces application and performance of automated High-rise Warehouse basing on application and development requirement of modern logistics techniques. And puts emphasis on the researching of control techniques in automated High-rise Warehouse stacker combining modern science and techniques. This paper elaborated on the design of the system of control, as well as the implementation of the system's hardware and the design of the software.Based on the parameter related to the automated storage, this paper presented the hardware system of stacker electrical control. Speed of the stacker was the basic. In order to improve the performance of the stacker, the system adopts the speed, position, double feedback control. The horizontal recognize addresses of system using laser rangefinder sensor positioning, and vertical recognition using photoelectric switches and address piece combination addressing. Speed-adjusted system by S7-200PLC and its extension module EM235 through transducer MM440 control ac motor. Goods fork system is by S7-200PLC binary system through stepping motor driver SH - 20403 control two-phase hybrid stepping motor. According to the requirements of the control system, this paper completed the selection of PLC,frequency converter, the motor and its controller. And presents the system hardware hookup. Then use the software of Siemens step7 designs the stacker control procedures.Key Words: Automated Storage and Retrieval System,Stacker,PLC目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 本课题设计的背景和意义 (1)1.2本课题设计的研究现状概述 (1)1.3本课题设计完成的主要内容 (3)第2章系统控制方案的确定 (4)2.1 自动化立体仓库的概述 (4)2.1.1 自动化立体仓库的组成 (4)2.1.2 自动化立体仓库的优点 (5)2.1.3 自动化立体仓库的发展 (6)2.2 堆垛机概述 (6)2.2.1 堆垛机的发展 (7)2.2.2 堆垛机技术的研究现状 (7)第3章堆垛机控制系统的硬件设计 (9)3.1 控制技术要求和系统总体设计 (9)3.2 堆垛机位置控制 (11)3.2.1 定位控制 (12)3.2.2 认址检测方式 (12)3.2.3 认址方式确认 (14)3.2.4 堆垛机速度曲线分析 (15)3.3 PLC及资源配置 (16)3.3.1 S7-200系列PLC概述 (16)3.3.2 CPU型号选择 (17)3.3.3 PLC模块选型 (19)3.4 堆垛机变频调速系统设计 (20)3.4.1 变频器的选型 (20)3.4.2 水平方向变频调速系统设计 (22)3.4.3 垂直方向变频调速系统设计 (24)3.5 堆垛机货叉控制系统设计 (26)3.6 安全检测传感器的应用 (27)3.7 元器件的选型 (28)3.8 通信方案的确定 (29)3.9 输入输出点分配 (30)3.10 本章小节 (32)第4章堆垛机控制程序设计 (33)4.1 堆垛机自检和复位/归位程序 (35)4.1.1 堆垛机自检程序 (35)4.1.2 堆垛机复位/归位程序 (35)4.2 自动方式下的堆垛机运行控制 (36)4.2.1 列向运行PLC程序实现 (37)4.2.2 行向运行PLC程序实现 (40)4.2.3 货叉伸缩控制PLC程序实现 (41)4.3 手动方式下的堆垛机运行控制 (44)4.4 本章小节 (46)总结 (47)参考文献 (48)致谢 (50)第1章绪论1.1 本课题设计的背景和意义自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出物流的系统。
堆垛机系统的方案设计

1绪论自动化立体仓库是物料搬运、仓储科学的一门综合科学技术工程。
它以高层立体货架为主要标志,以成套先进的搬运设备为基础,以先进的计算机控制技术为主要手段,是实现搬运、存取机械化、自动化,储存管理现代化的新型仓库。
它具有占地面积小、储存量大、周转快的优点,是集信息、存储、管理于一体的高技术密集型机电一体化产品。
将自动化立体仓库应用在立体库中,利用它自身的优势,可以实现货物的自动存取。
1.1设计的背景及国内外设计现状1.1.1 设计背景立体仓库的产生和发展是现代物流体系发展的要求和信息技术进步的结果。
随着立体仓库的越来越多,立体仓储技术已成为一门新兴的学科。
堆垛机是自动化仓库的主要作业机械,担负着出库,入库等任务,是立体仓库的核心部件。
自动化仓库的发展就是以堆垛机的发展为主要标志的,目前巷道式堆垛机为主要发展方向。
1.1.2 堆垛机系统在国内外的设计现状目前,堆垛机产品己经走入系列化,运行噪声低,备有各种安全保护装置,调速性能好,一般都具有完善的货物位置检测和货物尺寸检测等功能。
国外立体仓库普遍采用抗干扰能力强、工作可靠的可编程控制器来控制巷道堆垛机以及出入库系统,并且用计算机进行货位管理和库存管理,仓库管理计算机与上级管理机联网并能与控制系统相接,实现在线控制。
而在堆垛机方面,不断推出具有新的物理外形和更高性能的设备。
最新的开发包括提高电子和控制技术,在使堆垛机具有更高定位精度的同时,提高搜索能力和运行速度,以期获得更短的操作周期和更大的生产能力。
目前,巷道式堆垛机的起升速度己经可以达到90m/min,运行速度达到240m/min,货叉伸缩速度达到30m/min。
在有的高度较大的立体仓库中,已采用上、下两层分别用巷道堆垛机进行搬运作业的方法提高出入库的能力。
我国是从20世纪70年代初期开始研究采用巷道式堆垛机的立体仓库。
1980年,由北京机械工业自动化研究所等单位研制建成了我国第一座自动化立体仓库,并在北京汽车制造厂投产。
巷道式堆垛机控制系统的设计
团固四固团口 8 i
仿一 , 毽■ I A C MI E C P C DI A CA I AP
巷道式堆垛机 控制系统的 设计
姚 松 丽
( 海工 程 技 术 大 学 机 械 工程 学院 , 海 2 1 2 上 上 0 6 0)
Th n r l y t m sg o n t c e e Co t o s e De i n f r La e S a k r S
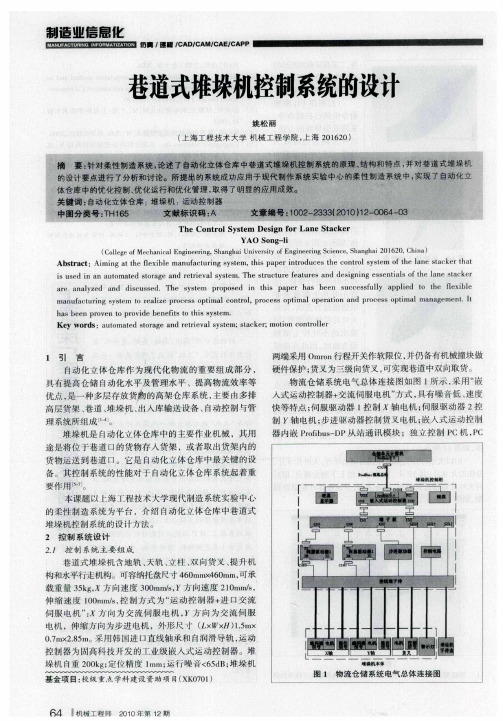
堆垛机是 自动化立体仓库 中的主要作业机械 ,其用 器 内嵌 Po b s DP从 站通 讯 模块 ;独立 控 制 P rf u — i C机 , C P
途是 将位 于巷道 口的货 物存 入货 架 ,或 者取 出货 架 内 的 货 物 运送 到巷 道 口。它是 自动化 立体 仓 库 中最关 键 的设 备 。其控 制 系统 的性 能对 于 自动 化立 体仓 库 系统 起着 重
基于PLC的堆垛机控制系统设计
基于PLC的堆垛机控制系统设计基于PLC的堆垛机控制系统设计摘要:堆垛机是一种广泛应用于各个领域的自动化物流设备。
在堆垛机运行过程中,控制系统起着至关重要的作用。
本文基于PLC(可编程逻辑控制器)为堆垛机设计了一套控制系统,以提高堆垛机的自动化程度、工作效率和安全性。
关键词:PLC;堆垛机;控制系统;自动化;效率;安全性。
1. 引言堆垛机是一种高效、安全且环保的物流设备,被广泛应用于各个领域。
它可以自动执行货物的存储、取出和转运等操作,大大提升了生产效率和货物管理的精度。
堆垛机的控制系统是保证其正常运行和工作效率的关键因素之一。
在过去的几年中,人们已经在控制系统中应用了多种技术,其中最常见的是PLC技术。
基于PLC的堆垛机控制系统可以实现对堆垛机多种功能的控制和管理。
2. 堆垛机的工作原理堆垛机主要由机架、叉车、货叉和控制系统组成。
在工作过程中,堆垛机首先通过轨道移动到货架前面,然后将叉车铰链装配到货叉上。
加仑之后,货架被移动到指定的位置,叉车将货物从中取出或存放物品。
之后,堆垛机再将货架返回到指定位置,并完成一次工作流程。
3. PLC在堆垛机控制系统中的应用PLC是一种可编程逻辑控制器,被广泛应用于自动化控制领域。
它是一种计算机硬件,可以通过特殊的编程语言(如ladder diagram)实现对工业自动化系统的控制和管理。
在堆垛机控制系统中,PLC可以实现对以下几个方面的控制和管理:位置检测、堆垛高度的控制、货物的存储和取出、货架的旋转等。
4. 堆垛机控制系统的设计4.1系统硬件设计本文所设计的堆垛机控制系统由PLC、人机界面、伺服控制器、以及传感器等部分组成。
PLC通过人机界面与用户进行通信,同时获取传感器检测到的信号和工况数据,并将其转化为控制信号。
伺服控制器用来控制堆垛机电机的转速和扭矩。
最后,传感器是通过获取物体位置和变化等信息,向PLC发送控制信号。
4.2系统软件设计本文所设计的堆垛机控制系统使用了三层架构模式。
立体仓库堆垛机控制系统安全操作规程

立体仓库堆垛机控制系统安全操作规程一、总则立体仓库堆垛机是一种用于取货、存储和堆垛的自动化设备。
为了保证操作人员的安全,减少事故发生,制定本规程。
二、操作人员要求1.操作人员必须具备本公司提供的相关岗位培训,并持有相应的操作证书。
2.操作人员要熟悉立体仓库堆垛机的工作原理和操作规程,了解关键部位的维护和保养方法。
3.严禁操作人员在疲劳或饮酒后进行操作,确保操作人员身心状态良好。
4.操作人员必须穿戴劳动防护用品,包括安全帽、防护眼镜、耳塞等,特别是要注意手部防护,戴上安全手套。
三、操作规程1.开机前检查(1)操作人员在开机前应进行安全检查,确保立体仓库堆垛机及相关设备运行正常。
(2)检查电源、电缆、线路等是否正常,确保电气设备无异常。
(3)检查机器是否存在明显的故障或损坏,如有发现,应停止使用,并及时报告维修人员处理。
2.装载货物(1)操作人员在装载货物时必须按照规定的操作流程进行操作,确保操作安全。
(2)货物应放置在堆垛机允许的最大载重范围内,严禁超载。
(3)在装载和卸载期间,操作人员应与堆垛机保持安全距离,严禁站在货物或机器的下方。
3.运行操作(1)运行操作前,操作人员应确认周围无人,并使用遥控器或控制仪对堆垛机进行操作。
(2)操作人员应遵守安全操作规程,如不能正确判断情况或发生异常情况时,应立即停止操作,并及时报告维修人员。
(3)严禁操作人员随意变更设备的参数设置或擅自对设备进行维修、改装等行为。
四、事故应急处理1.操作人员发现堆垛机出现异常情况时,应立即停止操作,并立即报告维修人员。
2.发生事故时,操作人员要根据现场情况采取安全措施,如疏散周围人员、切断电源等,并及时报告上级。
3.严禁擅自移动、拆卸或修复发生事故的设备,必须由专业人士进行处理。
五、操作记录和培训1.操作人员应按要求做好操作记录,包括每次操作的时间、内容和异常情况等。
2.公司要定期对操作人员进行安全培训,了解最新的安全操作规程,并检查操作人员的合格证情况。
立体仓库堆垛机控制系统操作安全规程

立体仓库堆垛机控制系统安全操作规程1 目的本规程用于指导操作者正确操作和使用设备。
2 适用范围本规程适用于指导本公司立体仓库堆垛机控制系统的操作与安全操作。
3 管理内容3.1 操作规程3.1.1 手动将方式选择旋钮旋至手动位置,可在手动操作面板上控制堆垛机前进、后退与起升、下降,货叉左伸、右伸。
手动工作模式为点动式工作方式。
在对堆垛机进行手动操作的时候,货叉必须在中位,才能进行前进、后退与高速起升、高速下降动作。
有起升、运行、货叉三个部件六个自由度的运行。
每个部件的运行都有高速与低速两种工作状态。
3.1.1.1 低速前进、低速后退:堆垛机以7.8M/Min的速度运行,作用范围前进限位~后退限位。
3.1.1.2 高速前进:堆垛机以100M/Min的速度运行,作用范围后退限位~33列,以20M/Min的速度运行,作用范围33~前进减速,以7.8M/Min的速度运行,作用范围前进减速~前进限位。
3.1.1.3 高速后退:堆垛机以100M/Min的速度运行,作用范围前进限位~3列,以20M/Min的速度运行,作用范围3列~后退减速, 以7.8M/Min的速度运行,作用范围后退减速~后退限位。
3.1.1.4 低速起升、低速下降:堆垛机以4.8M/Min的速度运行,作用范围上升限位~下降限位。
3.1.1.5 高速上升:堆垛机以30M/Min的速度运行,作用范围下降限位~上升减速,以4.8M/Min的速度运行,作用范围上升减速~上升限位。
3.1.1.6 高速下降:堆垛机以30M/Min的速度运行,作用范围上升限位~下降减速, 以4.8M/Min的速度运行,作用范围下降减速~下降限位。
3.1.1.7 低速左伸、低速右伸:货叉以4M/Min的速度运行,作用范围左限位~右限位。
3.1.1.8 高速左伸、高速右伸:货叉以20M/Min的速度运行,作用范围左限位~右限位。
在操作堆垛机时,不要高速冲击作用范围的边沿,例如:不要高速把货叉伸到左限位,而应该提前换为低速,让系统自动停止伸叉。
垂直玻璃堆垛机控制方案

P L C
输入 S 5 输出
垂 直堆垛 :堆 垛 周期 短 ,玻 璃不 容 易划 伤 ,但
动作 复杂 ,控 制要 求高 。适 用 于采集 中小 板 和对 质
量 要求较 高 的场 合 。
机械 手堆垛 :堆垛 周期 短 ,堆垛 精度 高 ,但成
统 可 提高 玻璃 生 产 自动 化水 平 ,减 少人 工或 水 平堆 垛造 成 的玻 璃划 伤 ,较 大地 提 高玻璃 生 产 的质量 水平 ,进 而提 高公 司 的
生 产效 益 。 关键词 P L C 变频 器 绝 对 值编 码 器
中 图分 类 号 :T Q1 7 1 文献 标 识 码 :A 文 章 编 号 :1 0 0 3 —1 9 8 7( 2 0 1 3) 0 7— 0 0 1 1 一 O 4
开关 、行程 开关等 )。
全 国性建材科技期刊—— 《 玻璃 》 2 0 1 3 年 第7 期 总第2 6 2 期
图
水
平描边对
互) _ _ o 横边对齐区段
^
齐 挡板 对
回 ± 程 回
齐
一 稳 肥
图
当玻 璃 前 边挡 到B1 1 时 ,玻 璃横 边 对 齐挡 板 升
图 1 垂 直堆 垛 机 控 制 系统 结 构 示 意 图
本很 高 ,适 用于采集小板和对质量要求较高 的场合 。
3 垂直 玻璃堆 垛 系统
3 . 1系 统 原 理
1 控 制 系统 主 要 硬 件
控制 系统 主要 硬 件包 括 :西 门子P L C s 5 ,绝对 值 编码 器 C E 6 5 一 M,安川 变频 器G 7 ,执行机 构 ( 变
堆垛机系统的方案设计
堆垛机系统的方案设计在堆垛机系统的方案设计中,有许多重要的因素需要考虑。
堆垛机系统是一种自动化的货物存储和取货系统,广泛应用于仓储和物流行业。
本文将从系统性能、技术选型、结构设计和安全性等方面,探讨堆垛机系统的方案设计。
一、系统性能设计堆垛机系统的性能设计是确保系统正常运行的基础。
性能设计应包括以下几个方面:1.1 提升速度和载重能力堆垛机系统的提升速度和载重能力对于提高货物存取效率至关重要。
设计时需充分考虑货物种类、尺寸和重量,确定堆垛机的最大提升速度和最大载重能力,以满足实际工作需求。
1.2 定位精度和稳定性堆垛机系统的定位精度和稳定性直接影响到货物的存取准确性和安全性。
设计时应结合自动控制系统,采用精准的定位传感器和稳定的运动控制算法,确保堆垛机的定位准确、稳定、可靠。
二、技术选型设计堆垛机系统的技术选型设计是选择合适的设备和技术方案,以满足系统需求。
技术选型设计应包括以下几个方面:2.1 传动方式和控制系统根据实际情况选择合适的传动方式,如液压传动、电动传动或混合传动等;同时,选择合适的控制系统,如PLC控制系统或计算机控制系统等,以实现自动化控制和监控。
2.2 使用的传感器和执行机构根据系统的具体工作要求和环境条件,选择合适的传感器和执行机构,如位置传感器、力传感器、激光传感器等,以及液压缸、电动机等,以实现系统的自动化操作和控制。
三、结构设计堆垛机系统的结构设计是确保系统稳定性和运行效率的重要因素。
结构设计应包括以下几个方面:3.1 跨距和高度根据仓库或物流中心的实际情况和存储需求,确定堆垛机系统的跨距和高度。
跨距和高度的设计需要考虑仓库的空间布局、货物存储密度和系统的提升能力。
3.2 支撑结构和导向装置设计合理的支撑结构和导向装置,以确保堆垛机运行的稳定性和安全性。
支撑结构应能够承受系统的重量和提升力,并具有足够的刚度和稳定性。
四、安全性设计堆垛机系统的安全性设计是保障人员和货物安全的关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
堆垛机控制方案
引言
堆垛机是一种用于自动化货物存储和检索的设备。
在现代物流行业中,堆垛机
被广泛应用于仓库和物流中心,能够提高作业效率和减少人力资源的浪费。
堆垛机控制方案是实现堆垛机自动化操作的关键,本文将介绍一种常见的堆垛机控制方案。
堆垛机控制方案概述
堆垛机控制方案通常包括硬件部分和软件部分。
硬件部分主要包括堆垛机本身
的物理组件,例如传感器、电动机、控制器等。
软件部分则是指控制堆垛机运行的软件程序,包括堆垛机的操作界面、运动控制算法、故障处理逻辑等。
硬件设计
传感器
传感器在堆垛机系统中起着重要作用。
常见的传感器包括激光传感器、红外传
感器、编码器等。
激光传感器可以用于测量物体的距离和位置,红外传感器可以用于检测物体的存在与否,编码器可以用于测量电动机的转速和位置。
这些传感器可以为堆垛机提供准确的物体位置信息,从而实现精确的堆垛和取货操作。
电动机
堆垛机通常采用电动机驱动,以实现物体的运动。
电动机的选择应根据堆垛机
的负载和速度要求来确定。
常用的电动机包括直流电机和步进电机。
直流电机可以提供较大的驱动力和速度范围,适用于较大的堆垛机;步进电机精度较高,适用于对位置要求较高的堆垛机。
控制器
堆垛机的控制器是控制堆垛机运动和操作的核心组件。
控制器通常由一个或多
个微处理器组成,可以实现对电动机的驱动、传感器的读取和信号处理等功能。
控制器还应具备通信接口,使其能够与上位机或其他设备进行数据交换。
常见的堆垛机控制器包括PLC(可编程逻辑控制器)和单片机。
软件设计
操作界面
堆垛机的操作界面应具有良好的人机交互性,以方便操作人员进行堆垛机的控
制和监控。
操作界面通常采用触摸屏方式,提供直观的图形界面和操作界面。
操作
界面应具备以下功能: - 显示堆垛机的实时状态信息,如当前位置、运动状态等;- 提供堆垛机的操作命令,如堆垛、取货等; - 显示堆垛机的故障报警信息。
运动控制算法
堆垛机的运动控制算法是实现堆垛机自动化运行的核心。
运动控制算法应根据
堆垛机的结构和运动特点,精确控制电动机的转动和物体的移动。
常见的运动控制算法包括PID控制、位置闭环控制等。
故障处理逻辑
堆垛机在运行过程中可能发生各种故障,例如传感器故障、电动机堵转等。
堆
垛机的控制方案应具备相应的故障处理逻辑,能够监测和检测故障,并采取相应的措施进行处理。
例如,当传感器故障时,控制程序应能够切换到备用传感器进行测量;当电动机堵转时,控制程序应能够及时停止电动机的运行,以避免进一步损坏。
结论
本文介绍了一种常见的堆垛机控制方案。
该控制方案包括硬件设计和软件设计
两部分。
硬件设计主要包括传感器、电动机和控制器;软件设计主要包括操作界面、运动控制算法和故障处理逻辑。
通过合理设计和实现,这种堆垛机控制方案能够实现自动化的货物堆垛和取货操作,提高物流效率和降低人力成本。