桂林理工大学2020年《876自动控制原理》考研专业课真题试卷
桂林理工大学876自动控制原理2020年考研真题
考试科目代码:876 考试科目名称:自动控制原理
(总分 150 分,三小时答完) 考生注意:1.请将答题写在答卷纸上,写在试卷上视为无效。
2.考试需带 三角板,科学计算器 用具
一 、填空题(每空 2 分,共 20 分)
(1) 一阶惯性系统的时间常数越大,其响应速度
H3
+C
2. (15 分)某单位反馈系统结构如下图所示,已知 xi(t)=t,d(t)=-0.5。试计算该系统的稳态误差。 D(s)
Xi(s)
4
0.5
X0(s)
0.2s 1
s(3s 1)
3. (10 分)根据以下锅炉液位控制系统示意图画出其方块图,指出输入量、输出量及被控对象。
4. (15 分)系统结构如图所示。 (1)试绘制 Ta=0 时的闭环极点; (2)确定使系统为过阻尼状态时的 Ta 值范围; (3)确定阻尼比§ =0.5 时的 Ta 值,确定相应的闭环极点位置,并计算此时输入 r(t)=t 时系统的稳态误 差 ess
1 Sa
时间函数 f(t)
(t)
1(t)
t
1 t2 2 eat
2020 年 《自动控制原理》 第 5 页 共 5 页
8.(11 分)离散系统差分方程如下,求该系统的脉冲传递函数。 c(k ) 3c(k 1) 2c(k 2) 3u(k 1) u(k 2)
2020 年 《自动控制原理》 第 4 页 共 5 页
注意:附录
序号 1 2 3 4 5
常用函数拉斯变换表
拉斯变换 F(S) 1
1 S 1 S2 1 S3
C.1/(±2lπ)
D.1/(±lπ)
(各备选项中 l=0,1,2……)
桂林理工大学2020年《888西方经济学》考研专业课真题试卷
桂林理工大学2020年硕士研究生入学考试试题
考试科目代码:888
考试科目名称:西方经济学
(总分150分,三小时答完)
考生注意:1.请将答题写在答卷纸上,写在试卷上视为无效。
2.考试需带不具存储功能的计算器用具
一、名词解释(每小题5分,共40分)
1.经济人2.边际替代率递减规律
3.限制价格4.市场失灵
5.GDP 6.奥肯定律
7.凯恩斯陷阱8.基尼系数
二、简答题(每小题10分,共60分)
1.什么是需求价格弹性?其影响因素包括哪些?
2.什么是等产量线?它有什么特点?
3.简述完全垄断市场的主要特征。
4.总供给曲线被区分为哪三种类型并解释原因。
5.何为通货膨胀?其主要原因是什么?
6.何为经济周期?其主要特征是什么?
三、计算题(每小题10分,共20分)
1.已知某消费者每年用于商品1和商品2的收入为540元,两商品的价格分别为P1=20元和P2=30元,该消费者的效用函数为U=3X1X22,该消费者每年购买这两种商品的数量应各是多少才可以获得最大效用?每年从中获得的总效用是多少?
2.假定某社会消费为C=100+0.8Y,投资I=150–6r,货币供给M=150(价格水平为1),货币需求L=0.2Y –4r。
求(1)IS曲线和LM曲线;(2)产品市场和货币市场同时达到均衡时的利率与收入。
四、论述题(每小题15分,30分)
1.结合图形说明厂商在既定成本条件下的产量最大化情形。
2.如何认识西方宏观经济政策主张的局限性。
2020年《西方经济学》第1页共1页。
2020年广西桂林理工大学综合英语考研真题附答案

2020年广西桂林理工大学综合英语考研真题Part I Structure and Expression (30分,每题1分)Directions: In this section there are 30 sentences followed by four multiple choices. Choose one to complete the sentences. Mark your answers on the Answer Sheet.1. A child with healthy appetite rarely dislikes food _____ it is badly cooked.A. unlessB. untilC. ifD. in that2.No one can be _____ hasty in making the decision as it is such a critical case.A. veryB. soC. tooD. that3._____ students have certain “gift” in common, they should be grouped together.A. WhileB. WhereC. WhenD. As4. his graduation, he found a job with a decent income.A. AtB. DuringC. WithD. Upon5.If these human initiatives are aided by special quality-control instruments,machines, and scientific sampling procedures, _______.A. so much the betterB. the much betterC. so it’ll be betterD.be it the better6. writers, like Flaubert, will spend days trying to get one or two sentencesexactly right.A. CarefulB. CautiousC. ScrupulousD. Prudent7.And the polluted water does not merely the life of the sea but threatensthe people who inhabit and visit its shores.A. stiffB. strifeC. stifleD. strive8.Such diseases as typhoid, paratyphoid, dysentery, polio, viral hepatitis andfood poisoning are _______ in the area, and there are periodic outbreaks of cholera.A. epidemicB. endemicC. rifeD. rampant9.An even greater risk in the ageing underground gas-pipes.A. larksB. luresC. lurchesD. lurks10.Anti-materialists tent to the importance of things.A. deriveB. derideC. depriveD. driveter school start time’s contribution to teenagers’ academic performance isnot an one.A. suspiciousB. vagueC. equivocalD. equivalent12.The undeveloped technology of the period the construction of moredelicate walls.A. secludedB. precludedC. concludedD. deluded13.Human beings feature their creative ability to trivial impulses intomomentous consequences.A. transformB. translateC. transmuteD. transmit14.Hypocrisy is the that vice pays to virtue.A. contributeB. attributeC. distributeD. tribute15.Most of his study time is _____ by computer games.A. absorbedB. ingestedC. digestedD. devoured16.Mary is very as she is constantly changing her mind.A. suspiciousB. capriciousC. deliciousD. precarious17.The rich ___ themselves from contact with the poor.A. residedB. retreatedC. secludedD. groped18.He found it hard to choose furniture that was ____ with the modern style of thehouse.A. constantB. consistentC. consequentD. constituent19.One’s _____ remark at the wrong moment could ruin the whole plan.A. indiscreetB. improperC. inappropriateD. impossible20.The average Chinese people will _____ themselves for years to buy a house.A. stingB. stinkC. stintD. stir21.Our progress was _____ by the extreme weather.A. hamperedB. forbiddenC. stoppedD. suspended22.The negotiation had reached a(n)_____, with both parties refusing to makecompromise.A. dilemmaB. difficultyC. embarrassmentD. impasse23.This new laser printer is _____ with all leading software.A. comparableB. competitiveC. compatibleD. cooperative24.Problems have been _____ by long neglect.A. evacuatedB. agitatedC. decapitatedD. aggravated25.A visitor must _____ to the customs of the country where he lives.A. informB. conformC. confirmD. affirm26.It is far too difficult for the young adult to _____ between truth and falsehood.A. discernB. discardC. disperseD. disregard27.In the _____ light I could hardly make out the way home.A. frailB. failingC. failedD. fail28.Drinking water before your meal will take the _____ off your hunger.A. edgeB. edictC. edibleD. eddy29.Those who are _____ of profits will not always be happy.A. insatiableB. fondC. insaneD. critical30.It _____ on me that Johnson had been making us nobody but a fool all along.A. dweltB. dawnedC. restedD. layPart II Figure of Speech (10分,每题1分)Directions: Identify the figure of speech in each of the following sentences. Choose the best answer from the box and write the corresponding letters of your answers on the Answer Sheet.1. I wandered lonely as a cloud that floats over valleys and hills.2. The mother is undergoing the joyful pain, and the painful joy of childbirth.3. Money is a bottomless sea, in which honor, conscience, and truth may be drowned.4. A thousand mustaches can live together, but not four breasts.5. A lie can travel half way around the world while the truth is putting on itsshoes.6. He was both out of pocket and out of spirits by that catastrophe, failed in hishealth and prophesied the speedy ruin of the empire.7. Technological progress has merely provided us with more efficient means for goingbackwards.8. The American society saw a gnawing poverty during the tears of the GreatDepression.9. Studies serve for delight, for ornament, and for ability.10. Nest to health, heart, home, happiness for mobile Americans depends upon theautomobile.Part III Blank Filling (20分,每题1分)Directions: Choose a proper word from the box to fill in each blank in the following passage. Each word can be used only once. Write the corresponding letters of your answers on the Answer Sheet.Most worthwhile careers require some kind of specialized training. Ideally, therefore, the choice of an 1 should be made even before choice of a curriculum in high school. Actually, 2 , most people make several job choices during their working lives, 3 because of economic and industrial changes and partly to improve 4 position. The “one perfect job” does not exist. Young people should 5 enter into a broad flexible training program that will 6 them for a field of work rather than for a single 7 .Unfortunately many young people have to make career plans 8 benefit of help from a competent vocational counselor or psychologist. Knowing 9 about the occupational world, or themselves for that matter, they choose their lifework on a hit-or-miss 10 . Some drift from job to job. Others 11 to work in which they are unhappy and for which they are not fitted. One common mistake is choosing an occupation for 12 real or imagined prestige. Too many high-school students -- or their parents for them -- choose the professional field, 13 both the relatively small proportion of workers in the professions and the extremely high educational and personal 14 . The imagined or real prestige of a profession or a “White-collar” job is 15 good reason for choosing it as life’s work. 16 , these occupations are not always well paid. Since a large proportion of jobs are in mechanical and manual work, the 17 of young people should give serious 18 to these fields.Before making an occupational choice, a person should have a general idea of what he wants 19 life and how hard he is willing to work to get it. Some people desire social prestige, others intellectual satisfaction. Some want security;others are willing to take 20 for financial gain. Each occupational choice has its demands as well as its rewards.Part IV Paraphrase (20分,每题2分)Directions: Explain the following sentences in your own words and write your answers on the Answer Sheet.1. A word that is more or less right, a loose phrase, an ambiguous expression, a vague adjective, will not satisfy a writer who aims at clean English.2. This knack for going instinctively to the heart of a matter was the secret of his major scientific discoveries.3. Much of human existence consists of efforts aimed at making sure that things don’t go wrong, fall apart, break down, or stop running until a decent interval has elapsed after manufacture.4. The idea of using a product once or for a brief period and then replacing it, runs counter to the grain of societies or individuals steeped in a heritage of poverty.5. The seeds must be carefully chosen; they must fall on good ground; they must be sedulously tended, if the vivifying fruits are to be at hand when needed.6. Finally, with both of us combining our linguistic and imaginative resources, finally, after what seems another hour, we decode it.7. Associating beauty with women has put beauty even further on the defensive, morally.8. So, for me, one of the keenest pleasures of appetite remains in the wanting, not the satisfaction.9. Economy is one powerful motive for camping, since the initial outlay upon equipment or through hiring it, the total expense can be far less than the cost of hotels.10. For all the trouble procrastination may incur, delay can often inspire and revivea creative soul.Part V Word Formation (10分,每题1分)Directions: Write out the full form of the following words and write your answers on the Answer Sheet.1. ASEAN2. APEC3. CIIE4. BRICS5. NBC6. e-cigar7. radar8. Brexit9. motel 10. ecotourismPart VI General Knowledge (10分,每题1分)Directions: Choose the best answer to each of the 10 multiple-choice questions. Mark your answers on the Answer Sheet.1. _____is the capital of Canada.A.VancouverB. OttawaC. MontrealD.York2. U.S. presidents normally serve a (n) _____ term.A. two-yearB. four-yearC. six-yearD. eight-year3. Which of the following cities is NOT located in the Northeast, U.S.?A. Huston.B. Boston.C. Baltimore.D. Philadelphia.4. _____is the state church in England.A. The Roman Catholic ChurchB. The Baptist ChurchC. The Protestant ChurchD. The Church of England5. The novel Emma is written by_____.A. Mary ShelleyB. Charlotte BrontëC. Elizabeth C. GaskellD. JaneAusten6. Which of the following is NOT a romantic poet?A. William Wordsworth.B. George Elliot.C. George C. Byron.D. Percy B. Shelley.7. William Sidney Porter, known as O. Henry, is most famous for _____.A. his poemsB. his playsC. his short storiesD. his novels8. Syntax is the study of _____.A. language functionsB. sentence structuresC. textual organizationD. word formation9. Which of the following is NOT a distinctive feature of human language?A. Arbitrariness.B. Productivity.C. Cultural transmission.D. Finiteness.10. The speech act theory was first put forward by _____.A. John SearleB. John AustinC. Noam ChomskyD. M.A.K. HallidayPart VII Proof Reading and Error Correction (10分,每题1分)Directions: The following passage contains 10 errors. Each line contains a maximum of one error. In each case only one word is involved. You should proofread the passage and correct it in the following way. Write your answers on the Answer Sheet.For a wrong word, underline the wrong word and write the correct one in the blank provided at the end of the line.For a missing word, mark the position of the missing word with a “ ^ ” and write the word you believe to be missing in the blank provided at the end of the line.Part VIII Reading Comprehension (40分,每题2分)Directions: In this section there are five reading passages followed by a total of twenty multiple-choice questions. Read the passages and mark your answers on the Answer Sheet.TEXT AStratford-on-Avon, as we all know, has only one industry -- William Shakespeare -- but there are two distinctly separate and increasingly hostile branches. There is the Royal Shakespeare Company (RSC), which presents superb productions of the plays at the Shakespeare Memorial Theatre on the Avon. And there are the townsfolk who largely live off the tourists who come, not to see the plays, but to look at Anne Hathaway’s Cottage, Shakespeare’s birthplace and the other sights.The worthy residents of Stratford doubt that the theatre adds a penny to their revenue. They frankly dislike the RSC’s actors, them with their long hair and beards and sandals and noisiness. It’s all deliciously ironic when you consider that Shakespeare, who earns their living, was himself an actor (with a beard) and did his share of noise-making.The tourist streams are not entirely separate. The sightseers who come by bus -- and often take in Warwick Castle and Blenheim Palace on the side -- don’t usually see the plays, and some of them are even surprised to find a theatre in Stratford. However, the playgoers do manage a little sight-seeing along with their playgoing. It is the playgoers, the RSC contends, who bring in much of the town’s revenue because they spend the night (some of them four or five nights) pouring cash into the hotels and restaurants. The sightseers can take in everything and get out of town by nightfall.The townsfolk don’t see it this way and local council does not contribute directly to the subsidy of the Royal Shakespeare Company. Stratford cries poor traditionally. Nevertheless every hotel in town seems to be adding a new wing or cocktail lounge. Hilton is building its own hotel there, which you may be sure will be decorated with Hamlet Hamburger Bars, the Lear Lounge, the Banquo Banqueting Room, and so forth, and will be very expensive.Anyway, the townsfolk can’t understand why the Royal Shakespeare Company needs a subsidy. (The theatre has broken attendance records for three years in a row. Last year its 1,431 seats were 94 percent occupied all year long and this year they’ll do better.) The reason, of course, is that costs have rocketed and ticket priceshave stayed low.It would be a shame to raise prices too much because it would drive away the young people who are Stratford’s most attractive clientele. They come entirely for the plays, not the sights. They all seem to look alike (though they come from all over) -- lean, pointed, dedicated faces, wearing jeans and sandals, eating their buns and bedding down for the night on the flagstones outside the theatre to buy the 20 seats and 80 standing-room tickets held for the sleepers and sold to them when the box office opens at 10:30 a.m.1. From the first two paragraphs, we learn that ________.A. the townsfolk deny the RSC’s contribution to the town’s revenueB. the actors of the RSC imitate Shakespeare on and off stageC. the two branches of the RSC are not on good termsD. the townsfolk earn little from tourism2. It can be inferred from Paragraph 3 that ________.A. the sightseers cannot visit the Castle and the Palace separatelyB. the playgoers spend more money than the sightseersC. the sightseers do more shopping than the playgoersD. the playgoers go to no other places in town than the theater3. By saying “Stratford cries poor traditionally” (Line 2, Paragraph 4), theauthor implies that ________.A. Stratford cannot afford the expansion projectsB. Stratford has long been in financial difficultiesC. the town is not really short of moneyD. the townsfolk used to be poorly paid4. According to the townsfolk, the RSC deserves no subsidy because ________.A. ticket prices can be raised to cover the spendingB. the company is financially ill-managedC. the behavior of the actors is not socially acceptableD. the theatre attendance is on the rise5. From the text we can conclude that the author ________.A. is supportive of both sidesB. favors the townsfolk’s viewC. takes a detached attitudeD. is sympathetic to the RSCTEXT BMany things make people think artists are weird. But the weirdest may be this: artists’ only job is to explore emotions, and yet they choose to focus on the ones that feel bad.This wasn’t always so. The earliest forms of art, like painting and music, are those best suited for expressing joy. But somewhere from the 19th century onward, more artists began seeing happiness as meaningless, phony or, worst of all, boring, as we went from Wordsworth’s daffodils to Baudelaire’s flowers of evil.You could argue that art became more skeptical of happiness because modern times have seen so much misery. But it’s not as if earlier times didn’t know perpetual war, disaster and the massacre of innocents. The reason, in fact, may be just the opposite: there is too much damn happiness in the world today.After all, what is the one modern form of expression almost completely dedicated to depicting happiness? Advertising. The rise of anti-happy art almost exactly tracks the emergence of mass media, and with it, a commercial culture in which happiness is not just an ideal but an ideology.People in earlier eras were surrounded by reminders of misery. They worked until exhausted, lived with few protections and died young. In the West, before mass communication and literacy, the most powerful mass medium was the church, which reminded worshippers that their souls were in danger and that they would someday be meat for worms. Given all this, they did not exactly need their art to be a bummer too.Today the messages the average Westerner is surrounded with are not religious but commercial, and forever happy. Fast-food eaters, news anchors, text messengers, all smiling, smiling, smiling. Our magazines feature beaming celebrities and happy families in perfect homes. And since these messages have an agenda -- to lure us to open our wallets -- they make the very idea of happiness seem unreliable. “Celebrate!” commanded the ads for the arthritis drug Celebrex, before we found out it could increase the risk of heart attacks.But what we forget -- what our economy depends on us forgetting -- is that happiness is more than pleasure without pain. The things that bring the greatest joy carry the greatest potential for loss and disappointment. Today, surrounded by promises of easy happiness, we need art to tell us, as religion once did, Memento mori: remember that you will die, that everything ends, and that happiness comes not in denying this but in living with it. It’s a message even more bitter thana clove cigarette, yet, somehow, a breath of fresh air.6. By citing the examples of poets Wordsworth and Baudelaire, the author intendsto show that ________.A. poetry is not as expressive of joy as painting or musicB. art grows out of both positive and negative feelingsC. poets today are less skeptical of happinessD. artists have changed their focus of interest7. The word “bummer” (Line 5, paragraph 5) most probably means something ________.A. religiousB. unpleasantC. entertainingD. commercial8. In the author’s opinion, advertising ________.A. emerges in the wake of the anti-happy artB. is a cause of disappointment for the general publicC. replaces the church as a major source of informationD. creates an illusion of happiness rather than happiness itself9. We can learn from the last paragraph that the author believes ________.A. happiness more often than not ends in sadnessB. the anti-happy art is distasteful but refreshingC. misery should be enjoyed rather than deniedD. the anti-happy art flourishes when economy booms10. Which of the following is true of the text?A. Religion once functioned as a reminder of misery.B. Art provides a balance between expectation and reality.C. People feel disappointed at the realities of modern society.D. Mass media are inclined to cover disasters and deaths.TEXT CNot long after the telephone was invented, I assume, a call was placed. The caller was a parent saying, “your child is bullying my child, and I want it stopped!”The bully’s parent replied, “you must have the wrong number. My child is a little angel.”A trillion phone calls later, the conversation is the same. When children are teased or tyrannized, the parental impulse is to grab the phone and rant. But these days, as studies in the U.S. show that bullying on the rise and parental supervision on the decline, researchers who study bullying say that calling moms and dads is more futile than ever. Such calls often lead to playground recriminations and don’t really teach our kids any lessons about how to navigate the world and resolve conflicts.When you call parents, you want them to “extract the cruelty” from their bullying children, says Laura Kavesh, a child psychologist in Evanston, Illinois. “But many parents are blown away by the idea of their child being cruel. They won’t believe it.” In a recent police department survey in Oak Harbor, Washington, 89% of local high school students said they had engaged in bullying behavior. Yet only 18% of parents thought their children would act as bullies.In a new U.S.PTA survey, 5% of parents support contacting other parents to deal with bullying. But many educators warn that those conversations can be misinterpreted, causing tempers to flare. Instead, they say, parents should get objective outsiders, like principals, to mediate.Meanwhile, if you get a call from a parent who is angry about your child's bullying, listen without getting defensive. That’s what Laura McHugh of Castro Valley, California, did when a caller told her that her then 13-year-old son had spit in another boy’s food. Her son had confessed, but the victim’s mom “wanted to make sure my son hadn’t given her son a nasty disease,” says McHugh, who apologized and promised to get her son tested for AIDS and other diseases. She knew the chance of contracting any disease this way was remote, but her promise calmed the mother and showed McHugh’s son that his bad behavior was being taken seriously. McHugh, founder of Parents Coach Kids, a group that teaches parenting skills, sent the mom the test results. All were negative.Remember: once you make a call, you might not like what you hear. If you have an itchy dialing finger, resist temptation. Put it in your pocket.11. The word “bullying” probably means______.A. frightening and hurtingB. teasingC. behaving like a tyrantD. laughing at12. Calling to a bully’s parent ______.A. has long existed but changed its contentB. is often done with careful thinkingC. often leads to blaming and misunderstandingD. is used to warn the child not to do it again13. According to the surveys in the U.S., _______.A. bullying among adults is also risingB. parents are not supervising their children wellC. parents seldom believe bulliesD. most parents resort to calling to deal with bullying14. When bullying occurs, parents should_______.A. help the bulling child get rid of crueltyB. resort to the mediatorC. avoid getting too protectiveD. resist the temptation of calling15. Laura McHugh promised to get the bullied boy tested for diseases because________.A. her son confessed to being wrongB.she was afraid to annoy the boy’s parentC.he was likely to be affected by these diseasesD.she wanted to teach her own son a lessonTEXT DFor thousands of Canadians, bad service is neither make-believe nor amusing. It is an aggravating and worsening real-life phenomenon that encompasses behavior ranging from indifference and rudeness to naked hostility and even physical violence. Across the country, better business bureaus report a lengthening litany of complaints about contractors, car dealers, and repair shops, moving companies, airlines and department stores. There is almost an adversarial feeling between businesses and consumers.Experts say there are several explanations for ill feeling in the marketplace. One is that customer service was an early and inevitable casualty when retailers responded to brutal competition by replacing employees with technology such as 1~800 numbers and voice mail. Another factor is that business generally has begun placing more emphasis on getting customers than on keeping them. Still another is that strident, frustrated and impatient shoppers vex shop owners and make them even less hospitable -- especially at busier times of the year like Christmas. On both sides, simple courtesy has gone by the board. And for a multitude of consumers, service went with it.The Better Business Bureau at Vancouver gets 250 complaints a week, twice as many as five years ago. The bureau then had one complaints counselor and now has four. People complain about being insulted, having their intelligence and integrity questioned, and being threatened. One will hear about people being hauled almost bodily out the door by somebody saying things like “I don’t have to serve you!”or “This is private property, get out and don’t come back! ” What can customers do? If the bureau’s arbitration process fails to settle a dispute, a customer’s only recourse is to sue in claims court. But because of the costs and time it takes, relatively few ever do.There is a lot of support for the notion that service has, in part, fallen victimto generational change. Many young people regard retailing as just a bead-end job that you're just going to do temporarily on your way to a real job. Young clerks often lack both knowledge and civility. Employers have to train young people in simple manners because that is not being done at home. Salespeople today, especially the younger ones, have grown up in a television-computer society where they’ve interacted largely with machines. One of the biggest complaints from businesses about graduates is the lack of inter-personal skills.What customers really want is access. They want to get through when they call, they don’t want busy signals, they don’t want interactive systems telling them to push one for this and two for that -- they don’t want voice mail. And if customers do not get what they want, they defect. Some people go back to local small businesses: the Asian greengrocer, a Greek baker and a Greek fishmonger. They don’t wear name tags, but one gets to know them, all by name.16.At a business place of bad service, the worst one can get is________.A.indifference and rudenessB.naked hostility and physical violenceC.having intelligence and integrity questionedD.being insulted and threatened17.One of the reasons for such ill feeling in the marketplace is that________.A.shoppers are usually strident, frustrated and impatientB.shoppers often take businesses to courtC.businesses use new technology instead of employeesD.businesses try every means to get customers18.What changes have taken place at Vancouver Better Service Bureau in the past five years?A.More effective.B. Less bureaucracy.B.More business. D. Better staff.19.Young clerks often lack interpersonal skills chiefly because they______.A.are skilled in dealing with machines, not peopleB.are not trained in simple manners at homeC.fall victims to generational changeD.take retailing to be a temporary job20.The author’s attitude towards businesses and bad service is________.A.attackingB. understandingC. regrettingD. warning。
2020年广西桂林理工大学化工原理考研真题A卷
2020年广西桂林理工大学化工原理考研真题A卷一、单项选择题(每题1分,共30题,总共30分)1.当离心泵输送液体密度增加时,离心泵的也增大。
A. 流量B.轴功率C. 扬程D. 效率2.热量传递的基本方式是____ ____。
A. 恒温传热和稳态变温传热B. 导热给热和热交换C. 气化、冷凝与冷却D. 传导传热、对流传热与辐射传热3.一不饱和的空气其________温度最低。
A.干球温度B.绝热饱和温度C.露点温度D. 湿球温度4.一转子流量计,当流量为50m3/h时,测定流量计转子上下压差为250Pa,现流量变为150m3/h,则流量计转子上下压差为 Pa。
A. 250B. 500C. 750D. 1505.流体在管道内作连续流动,在不同截面上,保持不变的物理量是________。
A. 温度B. 动能C. 机械能D.质量流量6.某塔高30m,进行水压试验时,离塔底l0m高处的压力表的读数为500kPa,(塔外大气压强为100kPa)。
那么塔顶处水的压强应为________。
A. 403.8kPaB. 698.1kPaC. 600kPaD.无法确定7.单级单吸式离心清水泵,系列代号为________。
A. ISB. DC. ShD. S8.孔板流量计是。
A. 变压差流量计,垂直安装B. 变截面流量计,垂直安装C. 变压差流量计,水平安装D. 变截面流量计,水平安装9.下列属于离心泵的不正常操作。
A. 改变离心泵转速B.改变离心泵叶轮的弯度C. 未灌满待输送液体运转D.关闭离心泵出口阀10.当热导率为常数时,单层平壁内的温度分布是分布的。
A.直线B.曲线C.折线D.不确定11.精馏过程是一个过程。
A.传热过程B. 传热和传质同时进行的化学过程B.传质过程 D. 传热和传质同时进行的物理过程12.下列进料不影响理论塔板数。
A.位置B.进料状态C. 组成D.总量13.精馏塔生产中,若操作回流比小于 R min,则。
桂林理工大学2020年硕士研究生入学考试初试主要范围

《量子力学教程》第二版,周世勋,高等教育出版社,2009 《民族经济学》,李忠斌主编,当代中国出版社,2011年;《中国民族概论》,宋蜀华、陈克进主编,中央民族大 学出版社,2001年 《高分子化学》,潘祖仁编,第五版,化学工业出版社,2011年 ①《马克思主义基本原理概论》高等教育出版社;②《毛泽东思想和中国特色社会主义理论体系概论》高等教 育 ①出 《版 综社 合③ 教《 程中 》国 (近 1-现4代)史,纲何要兆》熊,主高编等,教上育海出外版语社教育出版社;②《新编英语教程》(5-7),李观仪主编, 上 ①海 《外 城语 市教 规育 划出 原版 理社 》(第四版),吴志强,李德华著,中国建筑工业出版社,2010年。②外国城市建设史,沈 玉 ①麟 《, 社中 会国 学建 教筑 程工 》业 (出 第版 四社 版, )1,9王89思年斌。主③编中,国北城京市大建学设出史版,社董2鉴01泓6,年中版国;建②筑社工会业研出究版方社法,(2第0五04版年),风笑天 著,中国人民大学出版社2018年版。 统计学(第七版),贾俊平,何晓群,金勇进编著。中国人民大学出版社,2018年1月
《管理学——原理与方法》(第六版),周三多、陈传明等,复旦大学出版社,2018年6月 ①《管理学》(第六版),周三多等编著,复旦大学出版社2014年版;②《政府经济学》(第四版),郭小聪 主编,中国人民大学出版社2015年版
《高分子物理》金日光主编,第三版,化学工业出版社,2015年
桂林理工大学2020年《889管理学》考研专业课真题试卷
桂林理工大学2020年硕士研究生入学考试试题(A卷)考试科目代码:889考试科目名称:管理学(总分150分,三小时答完)考生注意:1.请将答题写在答卷纸上,写在试卷上视为无效。
2.考试需带╳╳╳用具。
一、名词解释(每小题5分,共30分)1.概念技能2.决策3.网络计划技术4.矩阵式组织5.负强化6.非正式沟通二、简答题(每小题10分,共40分)1.什么是管理的社会属性?2.法约尔提出的有关企业经营的六大职能是什么?3.决策包括哪些步骤?4.组织中人员配备的原则是什么?三、论述题(每小题16分,共48分)1.管理者通常需要扮演哪些角色?每种角色有什么特征?2.什么是企业社会责任?它主要体现在哪些方面?3.请阐述管理方格理论的基本观点。
四、案例分析题(32分)1.案例1(16分)在《西游记》中,唐僧师徒四人受唐太宗委托,到西天取经,历尽了九九八十一难才终成正果。
在这个过程中,孙悟空的本事最大,一路上的妖魔鬼怪都由他来解决。
而取经团的团长唐僧却是弱不禁风的角色,吃饭要靠徒弟化斋,睡觉要靠徒弟找地方,赶妖除魔更是全要仰仗三个徒弟,时不时还会受妖精迷惑给徒弟添乱,完全是个被保护的角色。
问题:谁是取经团的领导者?为什么?2.案例2(16分)李强已40岁,回首二十几年的奋斗历程,很为自己早年艰苦而又自强不惜的日子感叹不已。
想当初自己没有稳定的工作就结了婚,妻子是位孤女,有父母留下的一栋虽然面积不小但很破旧的平房;妻子在待业当中,两人常为生计发愁;后来,李强在某企业找到了一份稳定工作,并很快地被提拔为工段长,接着又成为车间主任,进而升为生产部长。
他记得那段日子对他个人和公司来说都是极为重要的转折。
他没日没夜的为公司工作,很为自己是其中的一份子感到自豪。
他的付出也给他带来了丰厚的回报。
他的工资收入已经相当可观了,更重要的是,他在不断地提拔升级中得到了妻子很为他感到自豪的权力和地位。
有段时间,他也沾沾自喜过,可现在想来,觉得自己并没成就什么,心里老是空空的。
2020年广西桂林理工大学量子力学考研真题

2020年广西桂林理工大学量子力学考研真题一 、简答题(每小题10分,共50分)1.波长为λ的光,求其光子的能量。
2.波函数),(t rψ的统计意义。
3.证明:]ˆ,ˆ[1ˆˆH F i t F dt Fd+∂∂=。
4. 在坐标xˆ表象中,求态⎪⎭⎫ ⎝⎛=x a a πψ3sin 2的表示。
5.证明:0ˆˆˆˆ=+z y y z σσσσ,其中y σˆ和z σˆ是Pauli 算符。
二、计算题(每小题20分,共100分)1.质量为m 的粒子在一维无限深势阱中运动,势能⎩⎨⎧><∞<<=a x x a x x U 或0,0,0)(试求: (1)能级与归一化波函数;(2)坐标算符xˆ在能量表象中的矩阵元。
2.设氢原子处于态⎪⎪⎭⎫ ⎝⎛=-),()(),()(),,(22321121ϕθϕθϕθψY r CR Y r R r nlm ,其中C 是常数,试求: (1)C ;(2)磁矩S me L m e M ˆˆ2ˆ --=的z 分量的期望值z M ˆ。
3. 对一维线性谐振子,设)ˆˆ(21ˆp i x aβα+=和)ˆˆ(21ˆp i x a βα-=+,其中 ωαm =和ωβm 1=,求: (1)]ˆ,ˆ[+a a;(2)设 ,2,1,0,)21(ˆ=+==n n E n E n H nn ω,求n a a ˆˆ+、n a ˆ和n a +ˆ。
4. 一转动惯量为I 、电偶极矩为D 的空间转子,设沿z 方向加上电场E ,即微扰θcos ˆEDr H -=',已知πϕθ41),(00=Y 和θπϕθcos 43),(10=Y ,试求其基态能量的: (1)一级修正;(2)二级修正。
5. 由2个全同粒子组成的系统,假设粒子间无相互作用,而且只有3个单粒子态α、β和γ(均已归一化),就以下二种情况,求体系可能的归一化态函数: (1)玻色子;(2)费米子。
2020年广西桂林理工大学普通物理考研真题
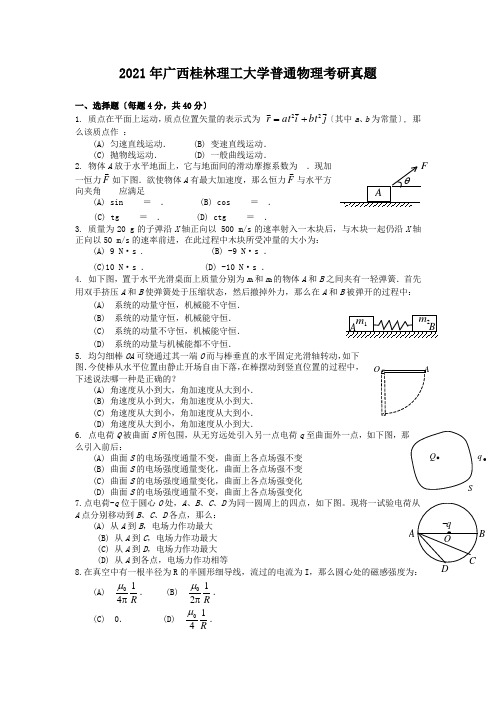
A B CO-qQ Sq 2021年广西桂林理工大学普通物理考研真题一、选择题〔每题4分,共40分〕1. 质点在平面上运动,质点位置矢量的表示式为 j bt i at r 22+=〔其中a 、b 为常量〕, 那么该质点作 : (A) 匀速直线运动. (B) 变速直线运动.(C) 抛物线运动. (D) 一般曲线运动.2. 物体A 放于水平地面上,它与地面间的滑动摩擦系数为.现加一恒力F 如下图.欲使物体A 有最大加速度,那么恒力F与水平方向夹角应满足 (A) sin =. (B) cos=.(C) tg =. (D) ctg =.3. 质量为20 g 的子弹沿X 轴正向以 500 m/s 的速率射入一木块后,与木块一起仍沿X 轴正向以50 m/s 的速率前进,在此过程中木块所受冲量的大小为: (A) 9 N ·s . (B) -9 N ·s .(C)10 N ·s . (D) -10 N ·s .4. 如下图,置于水平光滑桌面上质量分别为m 1和m 2的物体A 和B 之间夹有一轻弹簧.首先用双手挤压A 和B 使弹簧处于压缩状态,然后撤掉外力,那么在A 和B 被弹开的过程中: (A) 系统的动量守恒,机械能不守恒. (B) 系统的动量守恒,机械能守恒. (C) 系统的动量不守恒,机械能守恒.(D) 系统的动量与机械能都不守恒.5. 均匀细棒OA 可绕通过其一端O 而与棒垂直的水平固定光滑轴转动,如下图.今使棒从水平位置由静止开场自由下落,在棒摆动到竖直位置的过程中,下述说法哪一种是正确的? (A) 角速度从小到大,角加速度从大到小. (B) 角速度从小到大,角加速度从小到大.(C) 角速度从大到小,角加速度从大到小.(D) 角速度从大到小,角加速度从小到大.6. 点电荷Q 被曲面S 所包围,从无穷远处引入另一点电荷q 至曲面外一点,如下图,那么引入前后:(A) 曲面S 的电场强度通量不变,曲面上各点场强不变(B) 曲面S 的电场强度通量变化,曲面上各点场强不变 (C) 曲面S 的电场强度通量变化,曲面上各点场强变化(D) 曲面S 的电场强度通量不变,曲面上各点场强变化7.点电荷-q 位于圆心O 处,A 、B 、C 、D 为同一圆周上的四点,如下图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考试科目代码:876 考试科目名称:自动控制原理
(总分 150 分,三小时答完) 考生注意:1.请将答题写在答卷纸上,写在试卷上视为无效。
2.考试需带 三角板,科学计算器 用具
一 、填空题(每空 2 分,共 20 分)
(1) 一阶惯性系统的时间常数越大,其响应速度
2. (15 分)某单位反馈系统结构如下图所示,已知 xi(t)=t,d(t)=-0.5。试计算该系统的稳态误差。 D(s)
Xi(s)
4
0.5
X0(s)
0.2s + 1
s(3s +1)
3. (10 分)根据以下锅炉液位控制系统示意图画出其方块图,指出输入量、输出量及被控对象。
4. (15 分)系统结构如图所示。 (1)试绘制 Ta=0 时的闭环极点; (2)确定使系统为过阻尼状态时的 Ta 值范围; (3)确定阻尼比§ =0.5 时的 Ta 值,确定相应的闭环极点位置,并计算此时输入 r(t)=t 时系统的稳态误 差 ess
型以上系统。
(7)常用的串联校正方法有
校正、
校正和串联滞后-超前校正。
(8)某典型环节的传递函数是 G(s) = 1 ,则系统的时间常数是
。
s+2
(9) 线性自动控制系统的稳定性由系统的
决定。
二、选择题(每小题 2 分,共 30 分)
1.对于一阶、二阶系统来说,系统特征方程的系数都是正数是系统稳定的( )
2020 年 《自动控制原理》 第3页 共5页
R(s) E(s)
1 s
1
C(s)
s
Ta
5. 最小相位系统的对数幅频特性如图所示。试求开环传递函数和相位裕量γ。(10 分)
L(DB) -20db/dec
10
0 12
20
W(rad/s)
-40
-20
6. (9 分)已知控制系统开环频率特性曲线如图示。P 为开环右极点个数。г为积分环节个数。判别系统闭 环后的稳定性。(要求简单写出判别依据)。
1 S+a
时间函数 f(t)
(t)
1(t)
t
1 t2 2 e−at
2020 年 《自动控制原理》 第5页 共5页
A.充分条件
B.必要条件
C.充分必要条件
D.以上都不是
2.开环传递函数为G(S)H (S)
=
S
3
K (S +
4)
则实轴上的根轨迹为(
)
A.[-4,∞]
B.[-4,0]
C.(-∞,-4)
D. [0,∞]
3.比例环节的频率特性相位移 θ(ω)=( )
A.90°
B.-90°
C.0°
D.-180°
4. 控制系统的上升时间 tr、调整时间 tS 等反映出系统的(
7.
(15 分)已知单位负反馈系统的开环传递函数为
G(s) =
K
s(s +1)(0.5s +1)
(1) 试绘制 K 由 0→+∞变化的闭环根轨迹图;
(2) 用根轨迹法确定使系统的阶跃响应不出现超调的 K 值范围;
(3) 为使系统的根轨迹通过-1±j1 两点,拟加入串联微分校正装置(τs+1),试确定τ的取值。
C.不稳定
D.无法判断
11.已知系统前向通道和反馈通道的传递函数分别为
G(s)=
10 s(s −
1)
,
H(s)
=
1
+
K
h
s
,当闭环临界稳定时,
Kh 值应为(
)
A.-1
B.-0.1
C.0.1
D.1
12.闭环系统特征方程为 G(s)H(s)=-1,其中 G(s)H(s)的矢量表示为(
)
A.1/(2l+1)π
。
(2) 闭环系统稳定的充要条件是
。
(3) 设系统开环传递函数为
,则静态速度误差系数
。
(4) 要求对一个具有有限频谱的连续信号采样后得到的离散信号能够无失真地恢复到原来的连满足
。
(5)自动控制系统的基本控制方式有开环控制系统、
和复合控制系统。
(6)一系统对斜坡输入的稳态误差为零,则该系统是
)
A.相对稳定性
B.绝对稳定性
C.快速性
D.平稳性
5.Ⅱ 型系统对数幅频特性的低频段渐近线斜率为( )
A.-60(dB/dec)
B.-40(dB/dec)
2020 年 《自动控制原理》 第1页 共5页
C.-20(dB/dec)
D.0(dB/dec)
6.下列频域性能指标中,反映闭环频域性能指标的是( )
A.谐振峰值 Mr
B.相位裕量 γ
C.增益裕量 Kg
D.剪切频率 ωc
7.时域分析中最常用的典型输入信号是( )
A.脉冲函数
B.斜坡函数
C.阶跃函数
D.正弦函数
8. 开环不稳定,且当开环系统有 1 个虚轴右半平面的极点时,则系统闭环稳定的充要条件是 ( ) (w 由-∞
到+∞变化) 。
A. 奈奎斯特曲线不包围
8.(11 分)离散系统差分方程如下,求该系统的脉冲传递函数。 c(k) = 3c(k − 1) − 2c(k − 2) + 3u(k − 1) − u(k − 2)
2020 年 《自动控制原理》 第4页 共5页
注意:附录
序号 1 2 3 4 5
常用函数拉斯变换表
拉斯变换 F(S) 1
1 S 1 S2 1 S3
A.- 4
B.- 6
C. 6
D. 4
15. 传递函数的概念适用于( )系统。
A .线性、非线性
B. 线性非时变
C .非线性定常
D. 线性定常
2020 年 《自动控制原理》 第2页 共5页
三、计算题(共 100 分) 1. (15 分)试求下图的传递函数。
R
--
G1
H1
G3
G2 +
H2
H3
+C
B. 奈奎斯特曲线顺时针包围
1圈
C. 奈奎斯特曲线逆时针包围
1圈
D. 奈奎斯特曲线逆时针包围
2圈
9.下列系统中属于开环控制的为:( ) A.自动跟踪雷达 B.数控加工中心 C.普通车床
D.家用空调器
10. 已知系统的特征方程为(s+1)(s+2)(s+3)=s+4,则此系统的稳定性为( )
A.稳定
B.临界稳定
B.1/±(2l+1)π
C.1/(±2lπ)
D.1/(±lπ)
(各备选项中 l=0,1,2……)
13. 已知单位反馈控制系统在速度函数作用下,稳态误差 ess 为常数,则此系统为( )
A.0 型系统
B.I 型系统
C.Ⅱ型系统
D.Ⅲ型系统
14.设某环节的传递函数为 G(s)= 1 ,当ω=0.5rad/s 时,其频率特性相位移θ(0.5)=( ) 2s + 1