船舶主机功率和转速
三、船舶操纵性能之船速解读

(3) 推力功率 (Thrust horse power) THP 推进器收到功率后,产生推船前进的功率称为推力功率. 它等于推进器发出的推力T和推进器与水相对速度VP的乘积。 即: THP = T·VP /1000 ( kW) 式中: 推力T的单位为 N; VP 单位为 m/s ; THP单位为 kW。
4、船速的测定
4、船速的测定
船速的测定条件
船舶操纵性能受水深、水域宽度、气象条件、水文条件等诸多 因素的影响,所以为了使实船试验结果具有普遍意义,需要对试验 条件做出规定。IMO安全委员会在MSC/Circ.644中作出了详细规 定。 1. 水深、水域宽度 应在深水、宽度不受限制、但遮蔽条件较好的水域进行标准操 纵性试验,其水深应大于4倍的船舶平均吃水。 2. 船舶载况和吃水差 船舶应在满载(达到夏季吃水)、平吃水(吃水差为0)的条件下进
水深波浪浪级涌浪的周期及浪级涌浪的周期及方向方向海流能见度以及其他气象水文情况海流能见度以及其他气象水文情况二观测与记录试验数据试验数据应对有关试验的数据进行观测并以每次不超过应对有关试验的数据进行观测并以每次不超过2020秒的间隔秒的间隔进行记录这些数据包括
项目三:船舶操纵性能
任务一:
船
速
一、船舶的阻力与推力 (一)船舶阻力(Resistance) 船舶阻力可分为基本阻力和附加阻力。 R R0 R 1、摩擦阻力Rf 大小与船体湿水面积成正比,与航速的1.825次 方成正比 2、兴波阻力Rw 大小约与航速的4~6次方成正比 3、涡流阻力Re 大小与航速的平方成正比
(4)经济船速(Harbour Speed)
(1)额定船速
(1)额定船速 新船验收后的主机,可供海上长期使用的最大功率称为额定功率NH, 与其相对应的转数称为额定转数nH,该条件下主机发出的转矩称为额定转
船舶主机转速 功率计算公式

船舶主机转速功率计算公式
船舶主机的转速和功率计算是船舶工程中的重要问题,它涉及
到船舶动力系统的设计和运行。
船舶主机的转速和功率之间的关系
可以通过以下公式来计算:
功率(kW)= 扭矩(N·m)× 转速(rpm)÷ 9.5488。
其中,功率以千瓦(kW)为单位,扭矩以牛顿·米(N·m)为
单位,转速以每分钟转数(rpm)为单位。
这个公式可以用来计算船
舶主机的输出功率,通常在船舶设计和性能评估中使用。
另外,船舶主机的功率还可以通过以下公式来计算:
功率(kW)= (扭矩(N·m)× 2π × 转速(rpm)) ÷ 60。
这个公式也是用来计算船舶主机的输出功率,其中2π是一个
常数,等于6.2832。
这个公式在工程实际中也经常被使用。
在实际应用中,船舶主机的转速和功率计算还需要考虑到一些
修正系数,比如效率、摩擦损失等因素,这些因素会对最终的功率
产生影响。
因此,在具体的工程计算中,需要综合考虑这些修正因素,以得到更精确的结果。
总之,船舶主机的转速和功率计算是船舶工程中的重要内容,
通过上述公式和修正系数的考虑,可以计算出船舶主机的输出功率,为船舶设计和运行提供重要的参考依据。
知识点2船舶在各种航行条件下推进装置工况配合特性(精)
为了适应船舶实际营运的需求,船舶经常要航行在各种工况下:如:不同的吃水、多种气象条件、窄航道或浅水区、船舶污底及拖曳航行等;多种机动航行状态下:如:起航加速状态、倒航状态和转向状态等。
轮机人员应很好地掌握船舶推进装置在各种航行条件下的运转情况,以便正确地进行操纵和实施管理。
以直接传动方式的推进装置为例进行讨论:.分析工况配合特性所采用的方法。
在同一坐标系里画出螺旋桨(也代表船)和主机各自的功率——转速(或扭矩——转速)特性线,主机的特性线代表推进装置的驱动特性,而螺旋桨特性线代表推进装置的负荷特性。
.两曲线的交点符合能量守恒定律,推进装置可在此点稳定工作。
可将船舶航行分成两个不同阶段:即船舶正常(定速)航行工况;船舶机动(过渡)航行工况。
商船95%以上的时间航行于正常航行工况,船舶的航行条件(船舶阻力和主机工况)相对稳定,船舶的机桨配合点不发生大的变化。
机动工况下航行条件一直处于变化中,船舶的机桨配合点也一直变化。
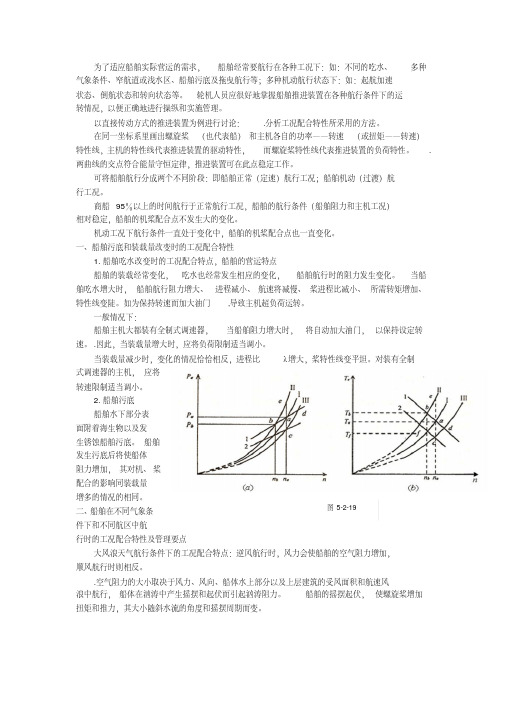
一、船舶污底和装载量改变时的工况配合特性1.船舶吃水改变时的工况配合特点,船舶的营运特点船舶的装载经常变化,吃水也经常发生相应的变化,船舶航行时的阻力发生变化。
当船舶吃水增大时,船舶航行阻力增大、进程减小、航速将减慢、桨进程比减小、所需转矩增加、特性线变陡。
如为保持转速而加大油门,导致主机超负荷运转。
一般情况下:船舶主机大都装有全制式调速器,当船舶阻力增大时,将自动加大油门,以保持设定转速。
.因此,当装载量增大时,应将负荷限制适当调小。
当装载量减少时,变化的情况恰恰相反,进程比λ增大,桨特性线变平坦。
对装有全制式调速器的主机,应将转速限制适当调小。
2.船舶污底船舶水下部分表面附着海生物以及发生锈蚀船舶污底。
船舶发生污底后将使船体阻力增加,其对机、桨配合的影响同装载量增多的情况的相同。
图5-2-19二、船舶在不同气象条件下和不同航区中航行时的工况配合特性及管理要点大风浪天气航行条件下的工况配合特点:逆风航行时,风力会使船舶的空气阻力增加,顺风航行时则相反。
船舶辅机的概述

定期对船舶辅机的螺栓、螺母等紧 固件进行检查和紧固,对需要润滑 的部位加注润滑油,保证设备正常 运转。
船舶辅机的定期检查与维修
定期检查
根据设备的使用情况和维修计划, 定期对船舶辅机进行检查,包括 对各部件的工作状态、磨损情况
等进行检查。
维修与更换
对于发现的问题和故障,及时进 行维修和更换,确保船舶辅机正
船舶辅机必须满足船舶航行的安全要求, 具备可靠的工作性能,能够保证船舶在各 种工况下的正常运转。
船舶辅机的设计应充分考虑经济效益,选 用具有良好性价比的设备和材料,降低船 舶的运营成本。
维护方便
环保节能
船舶辅机的设计应便于日常维护和保养, 尽量减少维修工作量和维修成本。
船舶辅机的设计应符合环保要求,采用节 能技术和材料,降低能耗和排放,减少对 环境的影响。
节能减排技术在船舶辅机中的应用
总结词
节能减排技术的应用将降低船舶辅机的能耗和排放,有 助于实现绿色可持续发展。
详细描述
随着环境保护意识的不断提高,越来越多的节能减排技术 被应用到船舶辅机领域。例如,高效燃烧技术和废气处理 技术的应用能够降低辅机的能耗和排放;新型能源如液化 天然气(LNG)的应用能够减少对传统燃油的依赖,降低 碳排放。这些节能减排技术的应用将有助于实现绿色可持 续发展,为环境保护做出贡献。
详细描述
船舶压载水处理系统通常包括压载水舱、过滤器、消毒器等设备。在压载水处理过程中, 通常采用紫外线消毒、电解消毒、臭氧消毒等方法对压载水进行处理,以消除或减少其
中的有害生物和物质。该系统的应用对于保护海洋环境和人类健康具有重要意义。
03
船舶辅机的设计与选型
船舶辅机设计的基本原则
安全可靠
船用主机轴带稳频发电机简介

船用主机轴带稳频发电机简介1.主机轴带稳频发电机的应用船舶在选用主柴油机时,要考虑海况,船况,柴油机安全等功率储备。
该储备须达到额定功率的10%~15%。
如果船舶航行于平静的海面,并且船舶出厂不久或坞修之后,这时海况及船况良好,主柴油机就有较大的功率储备没有得到充分利用,另外,主柴油机大都在部分负荷下运行,而在低于75%~85%额定功率的低负荷下运行时,其经济性将下降,如果利用轴带发电机,可以使主机长时间在较高负荷下运行,从而具有良好的经济性。
对于货船,一般来说其电站功率为主机额定功率的5%左右。
轴带发电机完全能满足船舶正常航行的电力需要。
主机轴带发电机因其良好的经济性而得到广泛应用。
2.采用主机轴带稳频发电机的优越性降低主机燃油消耗,提高综合经济性主机配备轴带发电机后,可以长期在较高负荷下运行,油耗率的依降低。
另外,主机效率一般比辅助柴油机要高,而且主柴油机一般燃用劣质燃油,从而进一步降低了燃料费用,提高了综合经济性。
利于能量综合利用主机配备轴带发电机,船舶正常航行时由轴带发电机供电,不必使用辅助柴油机,因此可以省去副机动力系统的功耗,而主机辅助系统功耗基本不变,目前,船舶副机的排烟余热一般没有得到利用,而四冲程的辅助柴油机较二冲程的主柴油机排烟温度高,因此浪费了大量排气余热。
如果设置主机轴带发电机,辅助柴油机因运行时间少,其排气余热浪费减少,而主机的排气余热可以得到更为有效的利用。
减少润滑油消耗及副机维修保养费用船舶正常航行时,由主机轴带发电机供电,于是辅助柴油机运行时间大大缩短,其滑油耗量减少,磨损减少,运行维护费用因此降低。
改善工作条件机舱噪声可以减轻,从而改善工作条件。
3.轴带稳频发电机特点WP-H系列船用稳频轴带发电机是本厂自主研发的新一代节能新产品,具有核心知识产权,国家专利。
是利用船舶航行主机动力附轴带动的轴带发电机,具有输出频率及电压稳定可靠的特点,其节能效果特别显著。
在船舶主机不稳定转速(从怠速至高速)的动力输入到稳频发电机上,给船舶提供各项性能可靠的优质电源。
船舶主要参数
1.船舶主要参数本船为双机、双桨、双舵,柴油动力,近海航区,为沿海相关海域及近海航区船舶提供相应服务及救助的供应船,其主要参数如下:船名:舟工6006;ZHOU GONG 6006;船舶类型:供应船;船舶登记号:070310000344;船舶识别号:CN20095041259;船级:中国船级社;船籍港:舟山;登记日期:2010年08月02日;船舶所有人:浙江蛟龙集团有限公司;安放龙骨日期:2009年05月11日;建造完工日期:2010年08月02日;建造地点及厂家:中国浙江舟山,岱山县晨业船舶制造有限公司;总长:67.80米;船长:61.70米;船宽:16.00米;型深:6.30米;设计吃水(夏季满载水线):5.200米;满载排水量:4196.700吨;空载吃水:2.633米;空载排水量:1850.190吨;参考载货量:1232吨;总吨:2138;净吨:1197;航区:近海;船体材质:钢质;主机型号:G8300ZC31B-1 功率:2206KW,转速:600r/min;G8300ZC31B-1 功率:2206KW,转速:600r/min;生产厂家:宁波中策动力机电集团有限公司;1#发电机组:1FC6404-4SA42-Z;功率:350.00KW;原动机:Z6170ZLD-10;功率:400.00KW;2#发电机组:1FC6404-4SA42-Z;功率:350.00KW;原动机:Z6170ZLD-10;功率:400.00KW;;应急发电机:MP-H-90-4;功率:90.00KW;原动机:6CTA8.3-GM155;功率:155.00KW;轴带发电机:1FC2561-4SB42;功率:1000.00KW;数量:2;配电屏型式:立式;数量:13应急配电屏型式:立式;数量:2本轮机舱主要设备清单及型号消防救生设备勘验4.电气设备勘验4.1主要电气设备清单及型号4.2通讯导航设备清单及型号。
船舶操纵性手册
船舶操纵性⼿册⼀.概述本船为钢质,前倾式⾸、⽅尾、双桨、双舵,柴油机驱动的内河⼀般货船。
本船航⾏于内河A、B级航区。
主要要素:总长Loa 86.00 m⽔线长Lwl 84.63 m垂线间长Lpp 82.80 m型宽B 14.60 m型深D 6.60 m设计吃⽔d 5.83 m排⽔量Δ6059.921 t主机型号8170ZCA-3额定功率Ps 601 kW*2额定转速N 1350 rpm设计航速Vs 9.50 kn⼆.满载出港情况下的静⽔航速在满载出港情况下,当主机输出功率为50%、75%、90%、100%时的静⽔航速,如下表:三.满载出港情况下的回转轨迹(⼀)旋回运动船舶在直航状态下,操⼀定值舵⾓,船便作纵移、横移和回转运动的复合运动,即旋回运动。
船舶旋回运动的三个阶段:1.机动阶段船舶⾃转舵时起到船⾸开始转动时⽌的时间间隔和航⾏距离,即为旋回运动的相对阶段。
此阶段的长短,主要取决于船舶排⽔量、船速和舵压⼒的⼤⼩。
排⽔量⼤、船速⾼、舵压⼒⼩,则机动阶段长,反之,则较短。
在这⼀阶段的运动特点是,船舶重⼼基本上沿原航向滑进并有向操舵相反⼀舷的⼩量横移,⽽出现明显的向操舵相反⼀舷横移;与船尾出现明显外移的同时,船舶还将因舵⼒位置较船舶重⼼位置低⽽出现少量的向操舵⼀舷横倾(内倾)。
2.变化阶段船舶从横移、回转运动时起⾄船舶作定常旋回运动时⽌的运动阶段,即为旋回运动的变化阶段。
操舵后,随着船舶横移速度与漂⾓的增⼤,船舶的运动速度⽮量将逐渐偏离⾸尾⾯⽽向外转动,越来越明显的斜航运动将使船舶的旋回运动进⼊加速旋回阶段。
该阶段的特征:(1)船舶加快向操舵⼀侧偏转。
(2)船舶重⼼由反向横移变为正向横移。
(3)船舶由内倾变为外倾。
3.稳定阶段船舶作匀速圆周运动时即进⼊定常旋回运动阶段。
随着旋回阻尼⼒矩的增⼤,当船舶所受的转船⼒矩、漂⾓⽔动⼒转船⼒矩和阻尼⼒矩相平衡时,船舶的旋回⾓加速度变为零,船舶的旋回⾓速度达到最⼤值并稳定与该值,船舶进⼊稳定旋回阶段。
船舶主机车令与转速对应关系探讨
一主机车令与转速间的关系1.主机车令系统主机车令系统是对主机进行各种操作的指令发送系统。
驾驶人员在驾驶室的控制站遥控推进装置上,对主机进行起动、调速和停车的遥控。
对可逆转低速柴油机还可实现换向遥控,对不可逆转柴油机则通过对齿轮箱进行啮合、脱开和倒车的遥控实现主推进系统正/倒车。
其中遥控操作手柄的推动方向应与船舶运动方向一致。
2.主机车令的实现主机车令实际上是通过内部指令传送系统实现。
如驾驶室发出改变航速控制指令,则主机机旁控制箱接收指令,并下达到机调速器,调速器再根据指令协调柴油机进行加速或减速,最后达到驾驶室车令所要求的转速位置,反映到船舶本身,则为船舶航速增加或递减。
如驾驶室发出改变船舶前进方向控制指令。
对于可逆转柴油机则直接换向即可实现;对于不可逆转柴油机则通过齿轮箱内的倒顺车离合器实现。
3.主机车令与转速主机车令与转速间有一定的对应关系。
这种对应关系主要根据不同主推进系统采取相应的设定原则,力求车令信号准确、主机响应迅速、控制过程主机工作平稳。
二主机车令挡位与转速设定的原则1.几种典型的柴油机推进装置遥控系统船舶的主推进系统由主机、减速齿轮箱、轴系、螺旋桨等组成。
为保证船舶能在各种复杂情况下航行,必须为柴油机设置起动、换向、调速和安全保护装置,也称主推进装置遥控系统。
按柴油机推进装置的传动方式及螺旋桨的形式,主要有以下几类遥控系统:1)可逆转柴油机与定距桨直接连接传动的遥控系统;2)可逆转柴油机与调距桨连接的遥控系统;3)不可逆转柴油机与调距桨经减速齿轮箱传动的遥控系统;4)不可逆转柴油机与定距桨经减速齿轮箱传动的遥控系统。
在上述4种遥控系统中,1)和4)是比较常见的主推进遥控系统方式,是本次车令与转速关系研究的重点。
而带调距桨的推进系统,还涉及螺距控制,一般由调距桨厂家打包整个遥控系统,因此本文不作赘述。
2.可逆转柴油机与定距桨直接连接传动的遥控系统此遥控系统是由主机车令操作手柄、逻辑程序控制电路和执行机构组成。
主机系泊试验(2)
船舶主柴油机的系泊试验系泊试验是在船厂码头进行,故又称码头试验。
试验时船舶处于静止状态(船速为零,即Vs=0),主机带动螺旋桨工作,产生最大的转矩和推力,即转矩为l00% Mh而转速仅为75%Nh-80%n H。
这是由于受码头堤岸坚固性和系泊状态的限制,主机和轴系推进装置不可能全负荷运转。
系泊试验是在验船师监督之下,为确保船舶具备航行条件对船舶动力装置进行的一次安装、修理质量和工作效用的试验。
系泊试验是为航行试验作准备,合格后方可进行航行试验。
如若系泊试验中发现不正常现象,则应在修复后重新试验。
船用主柴油机修理后的系泊试验包括:l)磨合试验(1)主柴油机更换活塞、活塞环、气缸套或轴瓦等零部件后,应按照柴油机说明书的规定进行磨合试验;或视部件更换种类和修理状况适当磨合,以便为主机负荷试验提供必要的安全保证;(2)不具备码头动车条件的,磨合试验可结合航行试验进行。
2)起动试验(1)主柴油机起动试验一般在冷态下进行。
有特殊规定的主柴油机,起动时的暖缸温度应按说明书规定。
(2)压力为额定值的空气瓶在中途不充气的情况下,可换向的主机应能连续起动不少于此次,试验时应正、倒车交替进行;不可换向的主机应能连续起动不少于6次。
每次起动均应顺利完成。
3)运转试验(1)主柴油机系泊试验时的最高转速n m<0.8 n H,n H为修理前主机航行中常用的最高转速;(2)运转试验工况与时间按表7-6进行;(3)在80% n H工况试验时应测取表7-7中各项参数,并初步调整各缸压缩压力和最大爆发压力、各缸排气温度。
运转试验时,应注意主柴油机运转的声音和有无振动、发热、漏泄等情况,各缸参数的不均匀度应符合规定要求。
系泊试验后,应按照说明书要求检查主轴承、连杆轴承、十字头轴承等处的温度,吊缸检查活塞、缸壁等情况。
4)换向试验(1)主柴油机换向试验应在热态下进行;(2)当主柴油机在最低稳定转速运转时,从换向操作开始至主机按反向运转为止,所需时间不应超过15s;(3)主机换向次数应不少于4次。
高速船用柴油机的功率标定与船舶动力的选型
(./!).) 次方关系 ! 在滑行阶段功率与转速 成大约 (.!!(.$ 次方关系 ! 见图 ( 中曲线 ) 和曲线 ’ & 此类用途的船舶大都在近海岸 %
( 排水型船舶 ) 半滑行型船舶 ’ 滑行型船舶 ! 水翼型船舶
港口以及 江 河 湖 泊 中 使 用 & 船 舶 动 力 的 负 荷率为 )"# !$"# ! 典型的年总运行时 间 不 超过 ’ """ && 此类用途的柴油机一般在使用时标定功率限制
油机的限制特性曲线和工作范围 " 图中黑线示出了 最大功率限制线 $ 它包括了最大燃烧压力限制 ! 涡 轮增压器的一些限制等 %! 最大烟度限制线 ! 最低 工作转速限制线 ! 最高工作转速限制线以及最低负 荷限制线等 " 限制线内 $黑线内 % 就是允许的工作 范围 # 图中的 !/ "/ #/ * 曲线是不同船舶的理论推 进特性曲线 " 船舶特性与船舶的型式 ! 种类 ! 结构参数以及 减速齿轮箱的速比 # 螺旋桨的结构参数等有关 " 一 般船舶螺旋桨特性线的功率与转速成约 # 次方的关 系# 而滑行型船舶在滑行状态功率与转速成约为
! 排水型船舶 " 半滑行型船舶 # 滑行型船舶 * 水翼型船舶
图"
高速船用柴油机的限制特性和工作范围
现代高速船用柴油机为了安全可靠地工作并达 到规定的使用寿命# 对柴油机的最大功率加以限 制 " 影响柴油机最大功率的限制因素有许多 # 主要 有柴油机气缸允许的最大燃烧压力 ! 涡轮增压器所 允许的极限转速 ! 柴油机极限排气温度 ! 涡轮增压 器的喘振 ! 柴油机的最高工作转速限制 ! 最低工作 转速限制 ! 最低工作负荷限制等 -"." 对不同的柴油 机 # 其限制因素不同 " 图 " 列出了 ! 台高速船用柴
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶推进装置的设计工况1.主机功率和转速1)主机的连续最大运转工况船舶柴油主机在额定转速下,在主机的规定正常维修周期内按标准环境条件连续运转的最大功率,为连续最大功率MCR ,或称连续功率或额定功率。
如采用ISO 3046/1标准环境条件,则称为ISO 连续功率或ISO 连续最大功率。
ISO 标准环境条件为气压100kPa ,气温27℃,冷却水温27℃,湿度60%。
实际装船运行时,主机功率将随环境条件而变,特别是对于配备中间冷却器的增压高速柴油机。
在主机的特性曲线图上,连续最大功率和额定转速的交点代表主机的连续最大运转工况MCR(Maximum Continuous Rating),通过这个点的推进特性曲线,为MCR 推进特性线。
通常应用MCR 作为确定推进器设计工况的基准点。
从推进主机实际运行条件及其性能特点出发,考虑燃料的经济性和与推进特性的配合,对一些船用柴油机常提供一个可以选择的低于标准MCR 的最大连续工况选择范围,由此选定的MCR ,称为减额最大连续工况DMCR 或指定(合同)MCR ,即SMCR (或CMCR ),并以此设计主机的运转限制(设定油泵和调速器)。
这种重新设定的减额MCR ,即为推进器设计时所用的MCR 。
2)主机的运转裕度和常用工况从动力装置设计的角度出发,考虑主机的经济性和维修保养,常对主机的功率扣除一个裕度,以便主机适应长期运转。
主机所扣除的这个裕度,称为运转裕度EM(Engine Margin),对于一般运输船舶,其范围为0~15%,习惯上常取10%的EM ,渔船和拖船等负载变动较大的船舶,则常取15%的EM 。
扣除EM 后的主机功率,为常用功率,在MCR 转速下的常用功率NO(Normal Output)或连续运转功率CSO (Continuous Service Output)运转的工况为连续运转工况CSR(Continuous Service Rating)或常用运转工况NOR(Normal Operating Rating)。
用汽轮机驱动时,由于汽轮机的低速高转矩特性,可以取用较小的EM 。
燃气轮机由于具有平坦的外特性,而且长期运转后功率无影响,可以采用在船用环境条件下的最大连续运转工况设计推进器。
3)主机的转速裕度在预期的使用年限以内,为了避免主机过载,避免在驱动固定螺旋桨时发生过转矩导致主机冒黑烟的现象,使船机桨在整个使用年限内均保持比较良好的配合,如果在设计螺旋桨时按试航状态的平静海面和深水时的航速以及额定功率设计,则应提高设计转速。
所提高的裕度称为螺旋桨转速裕度RRM (Right Running Margin )。
RRM 的数值的确定与主机的增压方式、冷却方式、排气系统的设计等有一定关系,可按照主机制造厂的推荐值确定,通常取3.0 %~ 7.0%,渔船主机因多具备高转矩性能,多取为1.5 %~ 3 %,汽轮机因具有低速高转矩性能,可取2%的RRM 。
螺旋桨设计时转速裕度的选取,见“推进器设计工况的确定”。
如果设计时不采用新船状态作为设计状态,即己考虑了主机的经年变化,则不采用转速裕度。
4)航海裕度在相同的航海速率下,考虑污底和风浪的影响所引起的船舶所需有效功率的增加和推进性能的下降,航行时所需主机功率的增加率通常用航海裕度(或称海上航行裕度、航海余裕)SM (Sea margin )表示,其定义式为(相同航海速率和排水量下) : SM=%)静深水中所需功率清洁船体和推进器、平实际航海状态所需功率(1001⨯-航海裕度通常按照船舶的航行区域或航线、船舶类型、主机型式,航速高低,由船东或设计者确定,通常在0 % ~25 %之间,国际航行的运输船舶有用15%的SM,定期班船或在北大西洋等气候条件较差海域航行者常取较大的SM;采用可控螺距螺旋桨时,可采用0%的SM。
在确定SM 时,还应考虑主机制造厂根据主机特性并考虑船机桨配合所提出的SM推荐值。
航海裕度还可以采用增加主机(推进轴)转速的百分数表示,由于推进特性曲线的功率和转速在低速运输船舶有近于三次幕函数的关系,而航速和转速之间有线性关系,故转速裕度与等效功率裕度之间的关系为:(1+转速裕度)3 =(1+功率裕度)注:螺旋桨定律:螺旋桨所需功率与其转速的三次方成正比2.主机功率的传递推进器的收到功率要从主机功率中扣除主机外带驱动的各种装置的功率损耗、减速装置的功率损耗以及推进轴系的功率损耗。
主机功率的传递过程如图:主机功率的传递过程柴油机的标称功率通常是制动功率P B,即其指示功率扣除主机内部机械损失,亦即由由制动测功器在主机输出端测得的功率。
制动功率扣除主机驱动的附连泵、发电机、空气压缩机和减速装置的消耗以后的功率,为轴功率P S。
船用汽轮机用P S表示其输出功率。
在尾轴尾端与推进器连接处测得的功率称为收到功率P D或推进器功率P P。
减速齿轮箱的功率损耗,用减速装置效率ηG表达,其一般数值见下表。
轴系的传送损耗由轴系传送效率ηs表达,ηs= P D/P B或P D/P S,其数值范围见下表。
减速装置效率轴系传送效率减速装置部件型式部件的ηG轴系部件型式部件的ηs单级齿轮减速双级齿轮减速液力销合器电磁离合器0.9750.950.9750.975中间轴承(每只)(往复式发动机)中间轴承(每只)(电动机及汽轮机)推力轴承(普通型)推力轴承(密契尔型)尾轴管0.997~0.99750.9980.9850.9950.990考虑整个轴系的转送损耗,还可以采用下列近似式计算P D:主机位于肿部:P D=P S/l.03 或P D = P B/1.05主机位于尾部:P D=P S/l.02 或P D=P B/l.033.推进效率船体有效功率P E或阻力功率P R与收到功率P D或推进器功率P P之比称为推进效率(或似是推进系数) ηD;ηD =P E / P D =P R/ P P。
推力功率P T(P T =TV A)与收到功率P D或推进器功率P P之比为船后推进器效率ηB;ηB=P T/P D=P T/P P。
船体有效功率P E或阻力功率P R与推力功率P T之比为船身效率ηH;ηH=P E/P T =P R/ P T = (l-t)/(l-w)。
船后推进器效率与敞水推进器效率之比为相对旋转效率ηR;ηR=ηB/ηO。
上述各项功率和效率的关系见下图。
在推进器设计时除了准确计算敞水效率ηO外,必须先行正确选定ηH和ηR的数值,以求正确反映推进系统的功率匹配和推进器在实船船后运行条件下的效能,必要时应在设计时采取提高ηH和ηR的措施,见“螺旋桨和船体间相互作用”和“螺旋桨的空化和激振力”。
4.推进器设计工况的确定1) 设计航速推进器设计时应满足在给定主机工况和航行条件下的航速要求,并且在满足各种负载条件下,通过权衡分析,以合适的设计航速来确定推进器的几何要素,主要是确定合适的直径和螺距的配合,以求在主机运转限制条件下使推进器的效能得以照顾到各种负载条件。
对于运输船舶,一般在建造合同中约定试航速率作为主要的性能指标之一,而在租船合同中则一般约定航海速率(平均航海速率),试航速率与航海速率的一般定义如下:试航速率——排水量按设计规格书规定(通常液货船按满载状态,干货船按约1/5载重量在状态)、主机按额定工况运转时,主机转速不高于最大转速(通常为MCR工况转速的101% ~105%,转速低的取较大值)时在平静海面深水中的测速结果(见“实船试航”)。
航海速率——100% 满载,主机按扣除运转裕度和航海裕度的工况运转,清洁船体和推进器、良好天气下的航速。
上述“良好天气”情况,视船舶大小而定,通常是指风力在蒲氏3级以下的海面状态,对于超级油船(VLCC) ,则在蒲氏6级风力下仍可视为“良好天气”,而小型船舶的“良好天气”条件,不超过风力在蒲氏2级的情况。
对于各种船舶的良好天气条件,应分别以海面风力等级指明,并据此建立试航速率与航海速率之间的换算关系。
航海速率一般均标为“大约”值,其允许误差范围一般为±5%或±0.5kn。
此外,航海速率应为无严重污底(在某些港口长时间停泊所造成),去掉水的流速影响的正常航行情况下的平均航速。
在设计固定螺距螺旋桨时,应该在要求的航海速率和在一定的主机功率配备下可能达到的航海速率之间,考虑试航速度和在其他航行条件下的性能,选择一个螺旋桨设计航速,可控螺距螺旋桨则通常先确定结构螺距比,然后校核航速。
2) 推进器设计的主机工况(1)确定主要要素时的主机工况。
如“主机功率和转速”所述,推进器设计时,特别是固定螺距螺旋桨设计时,应保证推进特性有足够的裕度,设计时应在规定的主机运转裕度和航海裕度的基础上,确定一个合理的推进器设计裕度,设计裕度的确定因素包括:①运转裕度和航海裕度:由于在设定运转裕度时包括了航海裕度所应考虑的因素,又或在设定航行裕度时包括了主机功率经年变化等运转裕度中所应考虑的因素,必要时可以不用简单叠加这两个裕度作为推进器的设计裕度。
②附加的转速裕度:某些情况下还采用另外附加转速裕度的方法,进一步加大设计裕度,以减少主机过载情况的发生。
这个附加的转速裕度,一般范围是0~l%。
③设计误差:由于设计计算方法和有效功率预报以及伴流分数预估的误差,应根据设计者的经验,适当调整裕度的数值。
(2) 确定盘面比和叶片厚度时的主机工况。
确定盘面比和叶片厚度时,应按主机的MCR 工况的功率和转速进行计算。
3)推进器设计的船体条件采用航海裕度时,船舶有效功率应与定义航海裕度的船体条件一致,即清洁船体、满载情况下的有效功率,计及空气阻力、附体阻力、操舵引起的阻力增加等,见“船模试验和实船换算”和“实船快速预报”。
不采用航海裕度时,应在上述有效功率上增加平均运转情况下的污底阻力增加(见“污底阻力”)和风浪中阻力增加(见“风浪中阻力增加及失速的估算”)。
如果在船舶设计的最后阶段,有效功率已通过船模试验或相似实船的试航结果得以比较准确地预报,建议增加3%左右的裕度。
在方案设计和初步设计阶段,则依设计者的经验增加一定的裕度。
4)各种裕度的综合计算确定设计工况时对各种裕度应按其定义进行计算,例如综合考虑EM和SM时,按功率裕度计算的驱动功率为MCR×(1-EM) /(1+SM),即当SM=15%,EM=10%时,运转功率为MCR的78.26 %。
此外,在讨论裕度时,应明确地把EM和SM分别计算。