飞思卡尔单片机问题总结
飞思卡尔单片机各种问题汇结

飞思卡尔问题汇结一、flash/EEPROM的操作Tips:a、HC08系列MCU中,很多Monitor ROM中固化了对flash操作的函数,用户只需调用即可,参考AN2874等应用笔记b、HCS08系列和HCS12系列MCU对flash的操作十分类似,可以参考 AN21401、FLASH操作函数 (HCS08系列)/dispbbs.asp?boardID=3&RootID=111907&ID= 1119072、如何将flash中的程序copy至ram中/dispbbs.asp?boardID=3&RootID=104074&ID= 1040743、S12内部寄存器的映射/dispbbs.asp?boardID=3&RootID=103261&ID= 1032614、S12EEPROM的使用、 INITRG,INITRM,INITEE寄存器的说明/dispbbs.asp?boardID=3&RootID=102260&ID= 1022605.INITRM寄存器的使用/dispbbs.asp?boardID=3&RootID=103214&ID= 103214二、编程技巧Tips:a、一般Codewarrior用引导生成工程的话,器件的头文件中都定义好了各个位,C语言编程只需找到对应的位进行操作即可b、用户自定义变量进行位操作,可以参考Codewarrior的格式1、CW位操作定义结构/dispbbs.asp?boardID=3&RootID=87784&ID=8 77842、HCS08系列单片机软件复位/dispbbs.asp?boardID=3&RootID=112903&ID= 112903三、Codewarrior 的使用Tips:a、尽量采用最新版本的CW进行编译开发b、尽量采用引导创建工程1、C语言和汇编语言之间共用常量/dispbbs.asp?boardID=3&RootID=101651&ID= 1016512、编译出现L1923 no DWARF debug info警告信息/dispbbs.asp?boardid=3&rootid=108124&id= 108124&star=四、ZigbeeTips:a、/zigbee 该网站中有freescale在zigbee方面的资料五、芯片各个模块的使用ADC1、序列通道AD转换/dispbbs.asp?boardID=3&RootID=80853&ID=8 08532、AD左右对齐/dispbbs.asp?boardID=3&RootID=83010&ID=8 3010PWM1、MON08调试PWM的注意事项/dispbbs.asp?boardID=3&RootID=33087&ID=3 30872、关于PWM的一篇好文章(网友推荐)/dispbbs.asp?boardID=3&RootID=43413&ID=4 34133、DSP56F8346的PWM程序/dispbbs.asp?boardID=3&RootID=59802&ID=5 98024、S12DG128B的PWM程序/dispbbs.asp?boardID=3&RootID=76420&ID=7 6420CAN1.9S08DZ CANdemo程序/dispbbs.asp?boardID=3&RootID=113744&ID= 113744RTI1.stop模式下,唤醒MCU(S12XDP512)/dispbbs.asp?boardID=3&RootID=115287&ID= 115287六调试工具Tips:a. HC08系列MCU的调试接口为MON08,用MON08 Multilinkb. HCS08、RS08和HCS12系列内置BDM模块,用BDM Multilinkc. 上述调试工具都是P&E公司提供的,另外该公司的Cyclone Pro 支持HC08/HCS08/HCS12系列MCU的调试。
2011飞思卡尔问题官方回答汇总(1)

所属赛区: 华南赛区 提问时间: 2010年11月16日 18:22:33问题标题:A 车模问题问题内容:如老师所言,A 车模在承轴等一些小方面做了改动,那以前买的A 车模能不能用于参加第六届的比赛? 回 答:可以。
秘书处队伍名称:风之子所属赛区: 华北赛区 提问时间: 2010年11月24日 20:38:55问题标题:去年车模 问题内容: 请问去年的B 型车模能参赛吗?能的话,能参加哪个组别的? 回 答:去年B 型车模由于质量不稳定,今年已经取消该车莫,所以今年不能参加比赛了。
而规定使用新型的B 型车模。
队伍名称:光电一队所属赛区: 华东赛区提问时间: 2010年12月03日 16:56:39问题标题: 禁止使用D C -D C 升压电路直接为驱动电机以及舵机提供动力 问题内容:规则的这句话是什么意思,舵机可不可以用开关稳压芯片供电?谢谢。
回 答: 规定禁止使用D C -D C 升压电路为点电机和舵机供电指的是电机和舵机的供电电压不得高于电池的电压(7.2V )。
舵机可以使用开关降压稳压电路供电。
队伍名称:追风队所属赛区: 西部赛区 提问时间: 2010年12月03日 22:21:53问题标题:C 车模问题内容:请问C 车模的电机的电压,电流等参数是多少啊?我们好准备。
谢谢! 回 答: C 型车模的电机(马达)参数如下:额定工作电压:7.2V ,最大工作电压 9.6V 最大效率点: 电流:0.679A ,转速:13050p r m最大功率点: 电流1.537A ,转速:8044堵转电流:2.916A C 型车模马达到后轮的传动比为7.46所属赛区: 华北赛区 提问时间: 2010年11月25日 11:27:45问题标题:关于第六届“飞思卡尔”智能车竞赛单片机选用问题问题内容:请问这届竞赛中16位单片机M C 9S 12X S 128单片机,光电组、摄像头组、电磁组在M C 9S 12X S 128 芯片封装选择使用上面有没有什么具体要求?摄像头组可以使用M C 9S 12X S 128 112脚封装芯片么? 回 答:今年第六届比赛使用X S 128单片机,对于组别没有任何限制。
飞思卡尔单片机中断

中断嵌套与中断返回
中断嵌套处理
在中断处理过程中,如果再次触发其他中断,需要进行嵌套处理,确保每个中断都能得到及时响应。
中断返回
中断处理完成后,需要返回被中断的程序,继续执行后续操作。在返回过程中,需要注意恢复被中断 程序的现场状态。
04
中断应用实例
定时器中断
定时器中断概述
定时器中断的配置
定时器中断是由单片机内部的定时器产生 的中断,用于在设定的时间间隔内执行特 定的任务。
中断使能与中断屏蔽
中断使能
通过设置中断使能位,可以启用或禁用某个中断源的中断处理功能。
中断屏蔽
通过设置中断屏蔽位,可以禁止某些不希望处理的中断源产生中断。
03
中断处理程序
中断处理程序的编写
初始化中断向量表
根据需要,在程序中初始化中断向量表,以确定不同 中断源对应的处理函数。
编写中断处理函数
根据中断源的不同,编写相应的中断处理函数,实现 中断响应和处理。
硬件结构
01
02
03
中断控制器
中断控制器是单片机中断 系统的核心部件,负责管 理中断的响应、优先级和 向量。
中断源
中断源是指能够触发中断 的信号源,如定时器溢出 、串行通信接收到数据等 。
中断优先级和向量
中断优先级决定了中断的 优先级,而向量则是指中 断处理程序的入口地址。
中断源
定时器溢出
当定时器计数达到最大值时,会触发一个中断,用于定时器 溢出处理。
THANKS。
解决方法
解决中断丢失问题需要从以下几个方面入手:首先,检查中断优先级设置,确保优先级 正确且没有重叠;其次,优化ISR的编写,避免在ISR中执行耗时的操作,确保ISR简洁 高效;最后,如果问题依然存在,可以尝试在外部硬件上加装抗干扰措施,如滤波电容
飞思卡尔单片机:“Target

飞思卡尔单⽚机:“Target ...
Q1:“Target self-reset detected”
最近在调试MC9S12xep100单⽚机时,发现⽤TBMDL调试总是出现“Target self-reset detected”。
软件仔细检查也⽆法解决问题。
后来仔细检查硬件发现:Reset脚和单⽚机的⼀个IO⼝短接,是由于板上的⼀个芯⽚损坏导致他们短接在⼀起,⽽程序初始化时,对此引脚执⾏了拉低操作,从⽽导致Target self-reset detected故障。
换芯⽚后,恢复正常。
总结经验:出现“Target self-reset detected”错误时,可以⽤万⽤表将reset脚和其余IO⼝拖拉测试,观测有⽆短接现象。
Q2:“ illegal_BP”
程序调试过程中还会出现 illegal_BP错误, illegal_BP即⾮法的中断点。
可能是程序中断设置错误之类故障。
这个可以通过对初始化单元进⾏逐⼀检查,判断是哪个初始化单元出问题。
最终的结果是有2个IO⼝短接到⼀起,⽽且同时被调⽤,导致出错。
因此单⽚机IO⼝之间的短路会引起以上⼀系列的⽆法预计的故障,要⼩⼼再⼩⼼!。
飞思卡尔智能车总结标准(2篇)

飞思卡尔智能车总结标准脚踏实地艰苦风斗我有幸能够参加____年全国点学生飞思____智能车竞赛,在这次竞赛中我们学到了很多,有专业方面的知识,比如单片机,各类传感器,不同芯片间的通信等等,也学会了一些书本上没有的东西,比如团队合作,如何网上购买到好的元器件,如何布局pcb板上各个元器件的位置等。
为了这次比赛,学校提前好久就开始准备了。
只是我们的课程比较多,平时去实验室的机会不是很多,为此我们也很伤脑筋。
终于等到寒假了,我们几个全身心的投入到这次比赛的准备中。
每天早上起来买点早餐就直奔实验室,白天动手做下硬件,晚上回到宿舍在就看下理论,联系编程。
这样的日子我们一点都没有感觉到累,每天都希望自己会学到更懂得东西,好似饿了许久的动物,得到了食物一般。
每天感觉都那么充实,想想大学里前两年学到的东西还没有那个寒假学到的东西多。
寒假里我们把历届的技术报告都看了看,这期间学到不少东西,尤其是对各类元器件的认识及使用。
真是受益匪浅。
接下来就是一些以前失败的经验,希望能有所参考。
比赛前在不注重实际赛道和自己练习赛道的区别,赛道一变,以前调试的结果都将无效。
所以,谨记一点,一定要吧硬件做好,比赛前一定好好利用好试车时间,多注意自己的赛道和比赛的赛道的区别,注意摩擦程度,光线的亮暗,空气的潮湿程度等。
其次是传感器的____,这次我们选用的是激光做传感器。
这个传感器相比其它传感器有很多优点,比光电的射的远,而且稳定性高,但是激光的很贵,所以提前一定要看好电路图,____一定要够稳固,不然后期传感器坏起来就头疼了。
我们以前有好多关键时刻传感器出问题失败的例子,不胜枚举,经验惨痛。
如果____不好,系统不够稳定,导致在比赛失败,而且平时调试浪费了好多宝贵的调试时间。
这一点,谨记,硬件固定一定要牢固。
其次是装配,各个模块间的连接线固定不牢靠。
使得导线接触不良,导致小车参赛时好几次冲出跑道(其中一个传感器的输入信号接触不良造成的)。
飞思卡尔智能车总结范文(2篇)
飞思卡尔智能车总结范文先静下心来看几篇技术报告,可以是几个人一起看,边看边讨论,大致了解智能车制作的过程及所要完成的任务。
看完报告之后,对智能车也有了大概的了解,其实总结起来,要完成的任务也很简单,即输入模块-控制-输出。
(1)输入模块。
各种传感器(光电,电磁,摄像头),原理不同,但功能都一样,都是用来采集赛道的信息。
这里面就包含各种传感器的原理,选用,传感器电路的连接,还有传感器的____、传感器的抗干扰等等需要大家去解决的问题。
(2)控制模块。
传感器得到了我们想要的信息,进行相应的ad转换后,就把它输入到单片机中,单片机负责对信息的处理,如除噪,筛选合适的点等等,然后对不同的赛道信息做出相应的控制,这也是智能车制作过程中最为艰难的过程,要想出一个可行而又高效的算法,确实不是一件容易的事。
这里面就涉及到单片机的知识、c语言知识和一定的控制算法,有时为了更直观地动态控制,还得加入串口发送和接收程序等等。
(3)输出模块。
好的算法,只有通过实验证明才能算是真正的好算法。
经过分析控制,单片机做出了相应的判断,就得把控制信号输出给电机(控制速度)和舵机(控制方向),所以就得对电机和舵机模块进行学习和掌握,还有实现精确有效地控制,又得加入闭环控制,pid算法。
明确了任务后,也有了较为清晰的控制思路,接下来就着手弄懂每一个模块。
虽然看似简单,但实现起来非常得不容易,这里面要求掌握电路的知识,基本的机械硬件结构知识和单片机、编程等计算机知识。
最最困难的是,在做的过程中会遇到很多想得到以及想不到的事情发生,一定得细心地发现问题,并想办法解决这些问题。
兴趣是首要的,除此之外,一定要花充足的时间和精力在上面,毕竟,有付出就会有收获,最后要明确分工和规划好进度。
飞思卡尔智能车总结范文(二)飞思卡尔智能车是一种基于飞思卡尔开发的智能车模型,它通过搭载了各种传感器和处理器,可以实现自主感知、决策和行动的能力。
在设计和制造过程中,我们充分发挥了团队的协作能力和创新思维,取得了令人满意的成果。
第十一届飞思卡尔常见问题解答
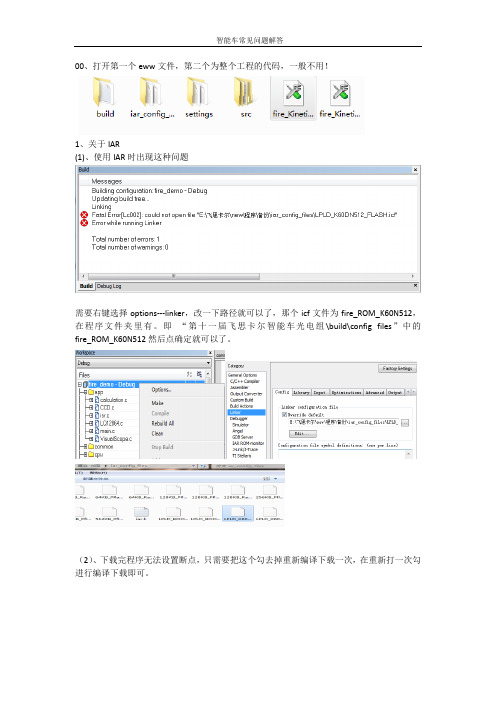
00、打开第一个eww文件,第二个为整个工程的代码,一般不用!
1、关于IAR
(1)、使用IAR时出现这种问题
需要右键选择options---linker,改一下路径就可以了,那个icf文件为fire_ROM_K60N512,在程序文件夹里有。
即“第十一届飞思卡尔智能车光电组\build\config files”中的fire_ROM_K60N512然后点确定就可以了。
(2)、下载完程序无法设置断点,只需要把这个勾去掉重新编译下载一次,在重新打一次勾进行编译下载即可。
(3)、有时出现这种问题,缺少ADC的文件夹
原因是路径中没有找到,需要添加该文件所在的文件夹路径,解决办法:添加$PROJ_DIR$\..\..\src\drivers\adc同理,缺少其他文件也是这么解决
(4)、一些常用设置
(5)、使用IAR编译效率快,在IAR中一定要注意各种变量的定义,unsigned char与unsigned short int的使用界限,如果超过了255,就不要用unsigned char了,尤其是在图像采集存到数组中时。
正交解码功能用s16型变量,即typedef short ints16;直接读取即可,就能测出正反转。
2、在直道上小车靠一边跑,多半是安装不正,靠右跑把摄像头靠右掰。
3、加权值的选择,这个其实只要是近小远大就可以了,跑的过于切弯或是其他问题,多是中线没提取好或是有效行判断错误或是P大了。
4、如出现这种现象(白赛道变黑了),是摄像头数据口的排线断了。
第八届飞思卡尔简单总结

关于传感器前瞻的问题,前瞻过远不是好事,可能因为看到对面的赛道而误判,根据官方赛道数据找到合适的前瞻距离。
入弯减速出弯加速方案可行性较低,不仅增加程序的复杂程度,而且速度提升并不明显,正常入弯的摩擦力足够了是不需要减速的(需要好好调节参数)。
明确自己车子能够稳定跑下来的最快速度,作为保底速度。
3、越复杂越容易出bug,尽量寻找一种简单有效的途径。
4、首先追求稳定性,其次追求速度。
赛前准备
提前开始学习,一学期时间基本也就是实现功能,无法很好的把车调好。(底层的函数可以不用学习,直接拿之前的用,重点放在算法上)
注意进度的安排调整,让每个队友都发挥作用,(后期写软件基本都是一个人写了之后,其它两个人就不好上手了。)
见过光电组的在车头加LED照明补光防止车子看到自身影的再补充。
如果对场地等有什么疑问要立即向主裁提出疑问。
不要起太怪的英文名,颁奖老师读不出来的时候真的很尴尬(玩笑啦)。
决赛只有三次跑的机会。
自带校旗可以挂在体育场的。
本届决赛赛道设置虚线,坡道,障碍。以赛前的官方通知为准。
电磁组比赛可以调节信源强度。
摄像头组到比赛环境应该注意阴影和反光对车子的影响。(实在调不好,在比赛时可以用自己的影子挡下赛道的反光)
比赛注意
自己操心比赛的各项时间以及安排(指导老师啥都不管)
调车完毕当晚可以领取赛道(数量有限)
做好赛车的保养工作。
正式比赛之前有调试机会,每组20分钟(本次),可以一个学校同一组别的队伍一起入场,每组就有40分钟调节时间。
比赛前六十秒试车,三十秒准备第一次跑,准备超时本次成绩不计,但是可以跑。
第八届飞思卡尔赛后简单总结
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
飞思卡尔单片机问题总结
常见问题回答精华列表
为了方便网友查询相关问题,特将常见问题精华帖整理归类
本帖不断更新,欢迎网友们给出建议
另外,在提问时,请在标题中选用具体问题的字眼避免使用请问某某、请教、紧急求助等作为标题。
对于具体器件,可以直接把器件类型写上,比如HC08QY4等;对于具体技术,比如CAN/LIN/ZigBee等也直接写明,便于版主分类回答,也便于其他网友查询。
一、flash/EEPROM的操作
Tips:
a、HC08系列MCU中,很多Monitor ROM中固化了对flash操作的函数,用户只需调用即可,参考AN2874等应用笔记
b、HCS08系列和HCS12系列MCU对flash的操作十分类似,可以参考 AN2140
1、FLASH操作函数 (HCS08系列)
/dispbbs.asp?boardID=3&RootID=111907&ID= 111907
2、如何将flash中的程序copy至ram中
/dispbbs.asp?boardID=3&RootID=104074&ID= 104074
3、S12内部寄存器的映射
/dispbbs.asp?boardID=3&RootID=103261&ID= 103261
4、S12EEPROM的使用、 INITRG,INITRM,INITEE寄存器的说明/dispbbs.asp?boardID=3&RootID=102260&ID= 102260
5.INITRM寄存器的使用
/dispbbs.asp?boardID=3&RootID=103214&ID= 103214
二、编程技巧
Tips:
a、一般Codewarrior用引导生成工程的话,器件的头文件中都定义好了各个位,C语言编程只需找到对应的位进行操作即可
b、用户自定义变量进行位操作,可以参考Codewarrior的格式
1、CW位操作定义结构
/dispbbs.asp?boardID=3&RootID=87784&ID=8 7784
2、HCS08系列单片机软件复位
/dispbbs.asp?boardID=3&RootID=112903&ID= 112903
三、Codewarrior 的使用
Tips:
a、尽量采用最新版本的CW进行编译开发
b、尽量采用引导创建工程
1、C语言和汇编语言之间共用常量
101651
2、编译出现L1923 no DWARF debug info警告信息
/dispbbs.asp?boardid=3&rootid=108124&id= 108124&star=
四、Zigbee
Tips:
a、/zigbee 该网站中有freescale在zigbee方面的资料
五、芯片各个模块的使用
ADC
1、序列通道AD转换
/dispbbs.asp?boardID=3&RootID=80853&ID=8 0853
2、AD左右对齐
3010
PWM
1、MON08调试PWM的注意事项
/dispbbs.asp?boardID=3&RootID=33087&ID=3 3087
2、关于PWM的一篇好文章(网友推荐)
/dispbbs.asp?boardID=3&RootID=43413&ID=4 3413
3、DSP56F8346的PWM程序
/dispbbs.asp?boardID=3&RootID=59802&ID=5 9802
4、S12DG128B的PWM程序
/dispbbs.asp?boardID=3&RootID=76420&ID=7 6420
CAN
1.9S08DZ CANdemo程序
/dispbbs.asp?boardID=3&RootID=113744&ID= 113744
RTI
1.stop模式下,唤醒MCU(S12XDP512)
/dispbbs.asp?boardID=3&RootID=115287&ID= 115287
六调试工具
Tips:
a. HC08系列MCU的调试接口为MON08,用MON08 Multilink
b. HCS08、RS08和HCS12系列内置BDM模块,用BDM Multilink
c. 上述调试工具都是P&E公司提供的,另外该公司的Cyclone Pro 支持HC08/HCS08/HCS12系列MCU的调试。
关于工具的手册可以访问下载。
d. 此外softech公司也提供调试工具,可以访问该公司网页
1.批量烧写芯片,自动计数
/dispbbs.asp?boardID=3&RootID=113860&ID= 113860。