基于dsp直流电机调速系统的设计_李方圆
基于DSP的直流电机调速、测速系统设计

c r e o o s d o h u r ntm t r ba e n t e DSP
W ANG i n Hu gne n , ig a U i ri , iig8 0 1 , hn ) S ho o Mehncl n ier g Q nh i nv sy X nn 10 6 C ia i e t
转控制 、 电机 调速 、 电机 测速 和 串 口电脑 显示 四个 功能 。
l 硬 件 系 统 介 绍
硬 件 系统直接 使用 D P教学 板上 的 A D转 换 电位器 , S / 用输 入 电压 的 A D转 换 结果 直 接控 制 P / WM 的输 出脉宽 , 利用 L 9 2 8驱动 器驱 动电机 运转 实现 调速 。测速用 固定 在 电机 主轴上 的光码 盘 和光耦 电路
Th l crc lcr u ti i l r la l n r ci a . e ee tia ic i ssmp e, eib e a d p a tc 1
Ke r y wo ds: P; r c u r n tr v lc t d lto v lc t a u i g DS die tc re tmoo ; e o i mo u ain; eo i me s rn y y
第2 9卷 第 6期 21 0 1年 1 2月
青 海 大 学 学 报 (自 然 科 学 版 ) Jun l f i h i nvr t( a r Sine o ra o Qn a U ie i N t e c c ) g sy u e
V0 . 9 No 6 12 . De . 01 c2 1
Absr c To r a ie te c n r lf n t n o e o i d lto n a u i fdie tc re tno t a t: e l h o to u ci fv lc t mo u ain a d me s rng o r c u r n — z o y tr t e p af r o o ,h l t m fTMS 2 F2 7A d lDS wa s d t v lp a2 o 3 0L 40 mo e P s u e o de e o 4V o to y tm a e n c n r ls se b s d o d gtlPW M rn i l . e s se c n b o n ce o a c mp t rwih smp e s ra o ts fwa e iia p cp e Th y t m a e c n e td t o u e t i l e ilp r ot r . i
基于DSP无刷直流电机调速系统设计
2 0 1 4 年第2 1 卷第1 2 期
技术研 发
基于 D S P无 刷 直 流 电机 调 速 系统 设 计
李长硕 , 谭 丽 ,隋 然
( 1 . 长春 大 学 ,吉林 长春 1 3 0 0 2 2; 2 . 长春 发 电设 备 总厂 ,吉林 长春 1 3 0 0 0 0; 3 . 黑龙 江科技 大学 ,黑龙 江 哈 尔滨 1 5 0 0 2 7 )
特点而被广泛应用 , 并 且 使 得 对 调 速 系统 的 需 求 更加 广 泛 。基 于 D S P无 刷 直 流 电 机 给 出合 理 的 调 速 系统 设 计 方 案 , 并就
相关研究进行总结。
关键词 : 无 刷 直 流 电机 ; D S P; 调 速 系统 d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 6— 8 5 5 4 . 2 0 1 4 . 1 2 . 1 1 0
1 无 刷 直 流 电机 的 概 述 1 . 1 无 刷磁 钢放在转子上 。其 电枢 绕组 的绕组形式 与交 流电机 的绕组 一样 , 采用 的是多 相形式 , 由逆变器连接到直流 电源上 , 运用 位置 传感 器实现 电子换 相的 这种方 式来 替代有刷 直流 电机 的电刷换相 。电机 的各个相 依 次通 电并且产生 电流 , 以转子主磁 场和定子 磁场相互产生 作用 3 . 2 电流 环 程序 的设 计 的方式来产 生转矩 。因此 , 与有刷 直流 电机相 比 , 其 取消 了电 电流环调节 的主要 目的是最大可能性去限制 电机的电流 , 机 的滑动接触机构 。由于 主磁场是恒定 的, 另外加上没有 绕组 加快 整个 动态 响应 , 是通过调节 对象 的动态结 构来实现 的。在 在转子上 , 没有 了励磁损耗 , 由此铁损是很小 的。总的来说 , 无 电机的启 动过程 中 , 要使工作电机能在所允许 的最大的 电流下 恒流” 的启动 。同时 , 在 电机 的转速调节 的整个运 行 中, 刷直流电机 既具备使 用寿命长 、 维 修和保 护 比较 方便 、 可靠 性 进行 “ 高等优 点外 , 也和交流 电机 结构一样 简单 , 并且 也具 有普通 直 可以使电流能够快速 的去跟 踪电流 给定 的变 化。 同时 电流环 它们分别是电流反馈值 和电流参考值 。并且整 流电机的转 矩较 大 、 调 速 比较 方便 、 效 率 高、 动态性 能 快等 优 的输入有 两个 , 势。 个系统运行 的电流 的参 考值是 由速度环 通过计算 出的结果给 1 . 2 无 刷 直流 电机 的 原 理 定的 ; 电流 的反馈值经 A / D转换后转变为数量值 , 并且被输送 无 刷直 流电机 的原理是让一定量 的电流流过 电枢绕组 , 这 到电流环 , 检测值 与参 考值做 差 运算 的结 果就 是 电流环 的误 与有刷 直流电机 的工作原理相 同, 由此 就产 生 了持续 不变 的只 差 。 . 3 速 度 环 程 序 的 设 计 和电流大小相关 联的 电磁转 矩 。无刷 直流 电机 的电概绕 组是 3 固 定在 定 子 上 的 , 转子是 永磁体 的 , 没 有 电 刷 。 关 于 元 刷 直 流 系统 软件速度环程序 的设计 的思想 是不停 地去收 集 电机 电机的定子电枢绕组 的接法 一般有 三种 :三扣 桥式 封闭式 接 的转速 , 之后与系统给出的速度指令作 比较 后 , 通过利 用 P I D 法、 三相桥式 品形接法和三相非桥式星形接法。 算法 , 并且综合 滤波算 法 , 以不断 地去 修正 运行 速度 的误 差 , 2 无刷直流 电机调速 系统的硬件设计 直 到 收 集 到 的 电机 转 速 与 系统 给 定 的转 速 相 同 为 止 。 2 . 1 调 速 系统 的 功 率 驱 动 电路 设 计 速 度 环 的程 序 设 计 有 给 定 速 度 和 转 速 反 馈 值 输 入 , 系 统 输 电机控制的驱 动器 采用 特有 的芯片。可 控制 6个大 功率 出的是电流参 考信 号, 并且使其 作为电流闭环 的输入信号 。系 管的关断和导通 , 通过输 出 H 0 1 , H 0 2和 H 0 3分 别控制三 相全 统的转速闭环设计 的主要 目的是 使转速 跟随程 序 的给定值不 桥驱动电路的上半桥 Q 1 、 Q 3 、 Q 5的接通和关 闭 ;而 I R 2 1 3 1的 断变化 , 并且达到无静态 的误 差。首先 , 程序 可 以计算 出 当前 输出L 0 1 , I / ) 2 , I / ) 3的作用是 分别控制 驱动 电路 的下半桥 Q 4、 电机运行 的转速 , 然后与程序给定的速度值进行 比较 , 从而得到 Q 6 、 Q 2的接通 和关 闭 , 从 而达 到控制 电机正 反转 和转速 的 目 速度误差的数值 , 再根据这个速度误差数值进行速度控制调节。 的 。全桥式电机电路原理 控制部分 由 6个 I G B T组成 , 其 作用 4 结 语 基于 D S P无刷直流 电机调 速 系统是 以 D S P为 核心 的 , 通 是在 P WM 信号 的控制作用下 , 将 电机 的工作 电压按规律 加到 电机的三相绕组 上 , 从而达到使 电机高速工作的。 过 软 件 的 编程 设计 来 达 到对 无 刷 直 流 电机 的实 际 调 控 。 同 时 , 2 . 2 调 速 系统 的 系统 保 护 电路 设 计 采用 的以 D S P作 为调速控制系统的核心 , 与普通 的调速系统相 在无刷直流电机调速 系统 的运行工作过程 中 , 若 出现欠压 比具有其优越 的特 点 , 处理 速度 高效便利 , 同时可 以处 理大量 或者过流情况 , P WM 信号驱动器会启动 系统 内部 的保护 电路。 的数据 。达到了使 其整个调速 系统实现全数字化 的 目的 , 同时 保护电路的作用主要 是用 于防止 I G B T因过流 , 出现短路 或其 电机稳态运行 时的稳速精度 可 以达 到更 高的水平 。随着技术 他的一些意外而出现被烧 坏的 现象。调速 系统 的保护 电路主 的成熟 , 相信该技术可 以更好地为工业发展服 务。 参考文献 : 要有过温保护 、 过流保护 、 过压 以及欠压保护 。 3 无 刷直 流 电机 调 速 系统 的软 件 设 计 [ 1 ] 王念旭. D S P基础 与应 用 系统设 计 [ M] _ 北京 : 北京航 空 3 . 1 无刷 直流 电机 调 速 系统 的 软 件 设 计要 求 航 天 大 学 出版 社 , 2 0 1 1 . 无刷直流电机调速系统仅有硬件部分是 不够 的, 要想保证 [ 2 ] 张雄伟. D S P芯片的原理与开发应 用 [ M] . 北 京: 电子 工 业 出版 社 . 2 0 1 2 . 其能够正常工作 , 还需要有软件 的配合才能构成一个 完整的控 7 8 5
基于DSP的直流电机控制系统设计_本科毕业论文

基于DSP的直流电机控制系统设计摘要:直流电机由于励磁磁场和电枢磁场完全解耦,可以独立控制,因此具备良好的调速性能,出力大、调速范围宽和易于控制,广泛应用于电力拖动系统中。
而随着对电机控制要求的不断提高,普通的单片机越来越不能满足对电机控制的要求,DSP技术的发展正好为先进控制理论以及复杂控制算法的实现提供了有力的支持。
本设计采用美国TI公司专门为电机数字化控制设计的16位定点DSP控制器TMS320LF2407作为微控制器。
该芯片集DSP信号高速处理能力及适用于电机控制优化的外围电路于一体,可以为高性能传动控制技术提供可靠高效的信号处理与控制硬件。
电机的控制系统是由检测装置、主控制器、功率驱动器以及上位机组成,其中DSP控制器是电机控制系统的关键部分,负责对电机的反馈信号进行处理并输出控制信号来控制电机的转动。
关键词:直流电机;DSP;PID控制器;PWMThe Design of DC Motor Control System Based on DSPAbstract:The DC motor armature magnetic field and the excitation completely decoupled, it can be independently controlled, so it has a good speed performance, contribute to a large power, widely speed range, and easy to control, so it is widely used in electric drive systems. With the motor control required for continuous improvement, common single MCU can't meet requirements of the motor control well, DSP technology just for the advanced control theory and complex control algorithm implementation provides a strong support.This design uses the American TI company specially for motor control design of digital 16 fixed-point DSP controller TMS320LF2407 as the controller. The chip set DSP signal the high processing capacity and used in motor control optimization the periphery of the circuit in a body, high performance driving control technology to provide reliable and efficient signal processing and control hardware. Motor control system is composed of detection devices, the main controller, power driver and PC componen ts, which DSP controller is a key part of the motor control system , responsible for the motor feedback signal processing and output control sig n al to control the rotation of the motor.Keywords:DC motor, DSP, PID controller, PWM目录第1章绪论 (1)1.1 课题概述 (1)1.1.1 课题研究的背景 (1)1.1.2 课题研究的目的及意义 (2)1.2 课题研究的现状 (2)1.3 课题研究的内容 (5)第2章系统总体设计 (6)2.1 系统的组成 (6)2. 2 DSP芯片选择 (6)2.3 TMS320LF2407 DSP 控制器介绍 (7)2.4 硬件方案论证 (10)2.4.1 测速传感器的选择 (10)2.4.2 功率驱动单元方案论证 (11)2.4.3 键盘显示方案论证 (11)2.4.4 PWM实现方案论证 (12)2.5 本章小节 (12)第3章系统硬件设计 (13)3.1 电源电路的设计 (13)3.2 功率驱动单元的设计 (13)3.2.1 PWM调速原理 (14)3.2.2 电机驱动电路 (15)3.3 速度检测单元的设计 (16)3.3.1 速度检测的方法 (16)3.3.2 速度检测电路设计 (17)3.4 按键控制单元的设计 (18)3.5 显示单元的设计 (20)3.5.1 1602液晶介绍 (20)3.5.2 显示单元接口电路设计 (20)3.6 通信单元的设计 (21)3.7 本章小节 (22)第4章系统软件设计 (23)4.1 主程序的设计 (23)4.1.1 主程序 (23)4.1.2 初始化子程序 (24)4.1.3 显示程序 (24)4.2 中断服务程序的设计 (24)4.2.1 PWM波发生程序 (25)4.2.2 捕获中断程序 (27)4.3 PID控制算法 (28)4.3.1 PID控制原理 (29)4.3.2 系统PID控制 (29)4.4 本章小节 (31)第5章系统总体调试 (32)5.1 调试准备 (32)5.2 系统调试 (32)结论 (34)致谢 (35)参考文献 (36)附录 ................................................................................................ 错误!未定义书签。
基于dsp无刷直流电动机调速系统的设计
引言随着社会生产力的发展,需要不断地开发各种新型电动机。
新技术新材料的不断涌现,促进了电动机产品的不断推陈出新。
早在本世纪30年代,就有人开始研制以电子换向来代替电刷机械换向的无刷直流机,并取得了一定的成果。
但由于当时的大功率电子器件仅处于初级发展阶段,没能找到理想的电子换向元器件。
1955年,美国的D. Harrison等人首次申请了应用晶体管换向代替电动机机械换向的专利,这就是现代无刷直流机的雏形,但由于电动机尚无起动转矩而不能产品化。
而后又经过人们多年的努力,借助于霍尔元件来实现换向的无刷直流机终于在1962年问世,从而开创了无刷直流机产品化的新纪元。
70年代以来,随着电力电子工业的飞速发展,许多新型的高性能半导体功率器件,如GTO, MOSFET, IGBT等相继出现,为无刷直流机的广泛应用奠定了坚实的基础[1]。
无刷直流机保持着有刷直流电机的优良机械及控制特性,在电磁结构上和有刷直流电机一样,但它的电枢绕组放在定子上,转子上放置永久磁钢。
无刷直流机的电枢绕组像交流电机的绕组一样,采用多相形式,经由逆变器接到直流电源上,定子采用位置传感器实现电子换相来代替有刷直流电机的电刷和换向器,各相逐次通电产生电流,定子磁场和转子磁极主磁场相互作用产生转矩。
和有刷直流电机相比,无刷直流机由于取消了电机的滑动接触机构,因而消除了故障的主要根源。
转子上没有绕组,也就没有了励磁损耗,又由于主磁场是恒定的,因此铁损也是极小的,因而进一步增加了工作的可靠性[2]。
对于无刷直流机的控制器,当前主要有专用集成电路(ASIC)控制器、微处理器(MCU)和数字信号处理器(DSP)等三种方式。
对于专用集成电路(ASIC-Application Specific Integrated Circuit)使用时灵活性较差,受到的限制过多。
现在市面上的无刷直流机控制器大多采用单片机来实现。
应用较多的是8096系列产品,但单片机的处理能力有限,特别是需要处理的数据量大、实时性和精度要求高时,单片机往往不再能满足要求。
基于DSP的小型直流电机调速系统设计

科技创新导报2016 NO.31Science and Technology Innovation HeraldDO I : 10.16660/j .c n k i .1674-098X .2016.31.006信息化工业基于DSP 的小型直流电机调速系统设计①孔佳仪程红(中国矿业大学(北京)机电与信息工程学院电气工程系北京100083)摘要:针对以PC 机为上位机,DSP 为下位机控制器的小型直流电机调速系统,给出了硬件系统设计方案、驱动电机选型,详细 介绍了功率驱动电路设计。
在此基础上,实现了上位机监控平台开发和下位机软件的设计。
通过电机调速特性实验验证了系统 硬件和软件设计的可行性,达到了控制系统稳态和动态性能要求,系统人机对话友好,该方案可推广应用于机器人运动控制系 统的设计。
关键词:直流电机调速D S P 驱动电路串口通信中图分类号:TM 33文献标识码:A文章编号:1674-098X (2016)11(a )-0006-04用D S P 替代传统的单片机进行电机控制已成为一种潮 流。
该文将髙速、髙性能、满足实时性要求的T M S 320F 2812 用于直流电机调速系统,设计驱动电路,满足低成本大功率 直流电机驱动控制,采用增量式PI 算法闭环反馈,通过改变 P W M 信号达到调速控制目的,T M S 320F 2812通过串行通 信数据接口与上位机进行信息交互,使得系统更加智能化, 人机对话友好,该方案可推广应用于机器人运动控制系统的 设计。
1系统硬件设计 1.1总体控制方案该文选取额定电压为12 V 的37G B -520大扭矩直流减 速电机,同时电机尾部装备了一个增量式霍尔旋转编码器, 简化了硬件结构。
控制系统的主要任务是接收上位机的控 制命令,采集直流电机速度反馈信息,通过闭环控制算法控 制直流电机完成相应动作[1],总体控制方案如图1所示。
DSP 用于产生P W M 驱动信号,经功率驱动电路,实现电机启动、图1总体控制方案示意图图2功率驱动电路①作者简介:孔佳仪(1995 — ),女,汉,山东泰安人,硕士研究生,研究方向:电力电子与电力传动。
基于DSP的直流电机调速系统设计
,式中 U 主要表示为电枢电压,Ia 主要表示
电枢电流,R 主要表示为点数电路当中总电阻 C 表示为电机结
构相关的电常数,n 则表示为转速 [1]。
,
通过此种公式,可以将直接电流的调速方法主要分为三种形
式 :1. 当调压转到调节电枢电压的过程时,可以使整个电机的速
度在很大的范围内实现平滑运动。2. 弱磁性调速转变为励磁性磁
‖18‖
电机调节速度的需求,还能在很大程度上减少了一些小硬件资源 的过度使用。
而在设计 DSP 的应用程序主要是先完成键盘所有按键的定 义,然后断开函数的声明,以及各个子程序在系统当中所用到的 变量定义,然后在根据系统当中多个模块进行重新的初始化,这 样当最后一道程序在进入一死循环时,就立即将断开的按键按下, 这样就可以通过断开子程序,将定时器的周期实施中断,从而获 取 SCI 的中断程序结构。 四、结论
本次 DSP 的直流电机调速系统的设计主要选用 TI 公司的
DSP-TMS320F2812。对于 PC 机主要完成的就是控制系统的任务
管理,即通过 LabVIEW 对 DSP 发出的转速命令,并接受。在基
于 DSP 的直流电机调速系统当中主要是由控制电机、功率电机、
DSP 控制电路以及转换速度建设的期间和隔电路板,以及 PC 机
等重要部分组成的,而根据 DSP 的直流电机调速系统相关的实验
结果显示,其调速系统的整体性结构主要是以计主从式的计算机
结构,而在采用 PC 上位机的过程时,下位机就一定要采用 DSP,
这样才能做到具有协调性,而 PC 机的用处主要用来完成整改控
制系统当中的管理,并通过对 DSP 进行发出转变速度的命令,以
程序员之家
基于DSP的直流电机调速系统设计
基于DSP的直流电动机调速系统设计与实现
摘要随着现代工业的不断发展,直流调速系统在许多领域获得了广泛的应用。
由于数字控制具有较好的控制性能和较强的抗干扰性,所以成为直流电机的主流控制方式。
为了进一步提高直流电机控制的现代化程度,电机的控制方法也由原来的单机独立模拟式控制转变为集中式数字式控制。
本文进行了基于DSP的直流电机调速系统控制器设计的研究与实现。
针对目前现有的条件和要求,建立了以DSP控制器为核心的直流电机调速系统,给出了系统的整体方案;系统根据调速原理,采用TI公司的TMS320LF2407A DSP芯片为控制芯片,利用H型电路进行对直流电机的调速控制,通过光电传感器对直流电动机的转速进行测定。
硬件方面,在分析了系统控制对象的基础上,以TMS320LF2407A为控制核心,设计了整个系统的硬件平台。
主要包括电源电路的设计、直流电动机驱动电路的设计、直流电动机测速电路的设计、DSP最小系统、键盘控制电路以及LCD显示电路的设计。
软件方面,在DSP的集成开发环境CCS下,利用C语言,进行了软件的设计与调试,实现了硬件的配置和整个控制器平台的所有功能,能用按键控制直流电动机的启动、停止、加速、减速、正转、反转功能,并将工作状态通过LCD显示出来,通过DSP定时器的配合使用,实现了软件脉冲触发功能,从而实现了直流电动机的测速功能。
通过对研制的DSP调速控制器的实验以及测试,该控制平台运行稳定,设计思路正确,实现了预期的功能,能够实现测速调速功能和显示功能,有着一定的实用价值。
关键词:直流电动机DSP 调速The Design and Realization of Speed Regulation System for DC Motor Based onDSPAbstractDirect-current speed regulation system has gained broad application in a lot of fields with rapidly development of modem industrialization.The Digital Control will become the mainstream of DC timing system by good performances and stable ability to resist the disturbance.In order to improve modernization,the control methods of DC timing system have changed from single control to network control.This paper studied and realization the design of controller in speed regulation system based on DSP, after aimed at the status of laboratory at present. To build a Direct-current speed regulation system using by DSP as core controller and made overall scheme. Using the TMS320LF2407A DSP of TI company, according to speed regulation principle. To controlled the timing of DC Motor using the H model circuit, and measured the rotary speed through photoelectric sensor for DC Motor.In hardware, the whole platform is designed by TMS320LF2407A as core controller, based on analyzing the controlled object. It is include of the electrical source circuit, the driving circuit for DC Motor, the circuit measurable revs for DC Motor, the DSP smallest system module, the circuit of control by keypad and the showing circuit by LED.The software achieves all the functions of system and accomplish with hardware configure, which is debugged in the CCS IDE and using C language.The system make the function of start, stop, forward, backward, acceleration, deceleration through keypad, and show the state by LED. Measuring revs for DC Motor and realization the function pulse spring by software cooperate in DSP timer.The running stability of system, the correctness of designing and all the intending functions were demonstrated by experiment and testing for the device of DSP controller.It could control the speed of DC motor and monitoring controller by LED. This platform has a good promotion value.Keywords:DC Motor;DSP;Speed Regulation目录1 引言 (1)1.1课题研究综述 (1)1.1.1 国内外研究动态 (1)1.1.2 发展趋势 (2)1.2课题完成的内容及选题意义 (3)1.2.1 完成内容 (3)1.2.2 选题意义 (3)1.3课题研究的主要内容及章节安排 (4)2 直流调速原理 (5)2.1调速方法 (5)2.1.1 直流电动机调速方法 (5)2.1.2 PWM调速控制原理 (6)2.2测速方法 (11)2.3本章小结 (12)3 DSP控制器介绍 (13)3.1DSP芯片发展及结构 (13)3.1.1 DSP芯片发展 (13)3.1.2 DSP芯片结构原理 (13)3.2控制器TMS320LF2407A介绍 (15)3.2.1 控制器TMS320LF2407A特点 (15)3.2.2 设计用到的模块 (16)3.3DSP开发 (18)3.3.1 DSP开发所需硬件资源 (18)3.3.2 DSP软件开发 (18)3.4本章小结 (19)4 硬件设计 (20)4.1系统总体方案 (20)4.2DSP供电电源设计 (21)4.3JTAG接口电路设计 (21)4.4键盘控制电路设计 (23)4.5LCD液晶显示控制电路设计 (23)4.6直流电动机PWM调速测速电路设计 (25)4.6.1 直流电动机PWM调速电路设计 (25)4.6.2 转速采集电路设计 (26)4.7本章小结 (27)5 软件设计 (28)5.1CCS简介 (28)5.1.1 安装过程 (28)5.1.2 CCS软件简介 (29)5.2程序设计 (31)5.2.1 主程序流程图 (31)5.2.2 主要模块程序流程图 (32)5.3本章小结 (36)6 结论 (38)6.1调试结果 (38)6.2总结 (39)谢辞 (40)参考文献 (41)附录 (42)1开发板外形图 (42)2设计的总电路图 (43)3设计的总程序 (44)外文资料 (60)1 引言1.1 课题研究综述一个多世纪以来,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
基于DSP控制的斩波器无刷直流电动机调压调速系统的设计
收稿 日期 :0 9 1 8 2 0 —1 —2
宽度。 e 当l 等于零时P WM 波的宽度不变 ; e 当I 过大 即参考 电流大于实际 电流很多 , 的 P 使 WM 宽度大 于 控 制周 期 时 就 令 P WM 的宽 度 为 控 制 周 期 , 时 此 输 出最 宽 的 P M 波 以最 快 地 增 大 转速 ; I 过 小 W 当 e ( 负值 ) 参 考 电 流 小 于 实 际 电流 很 多 , P 为 即 使 WM 宽 度小 于零 , 令 P 就 WM 的宽 度 为零 , 时 以最 快 的 此 速 度 降低转 速 。 由DS P输 出 的六: P M 波 , 由驱  ̄ W N 经 动 电路控 制 晶 闸管 的开 关 模 式 , 而 控 制 无 刷 直 流 进 电动机 的转 速 。 2 电 路实 现 及仿真 双 闭环 调 速 系统 的 电 气主 接 线 包 括 电源 、 流 整 桥 、 R、 GT 直流 无 刷 电动 机 、 动 电路 、 S 驱 D P芯 片 、 以 及 电路 电流 、 电压 的检 测 和 保 护 电路 , 电流 、 速 的 转
1 1 无 刷 电机 的 D P控 制 系统 . S
I ek— Ie r f r 丘
,
+ k( p EK — EK 1 一 )+ K i TEK 】 一
() 1
其中: I 速度 调 节器 输 出 ; 一 E —K 时 刻 的速度 误 差 ; k Kp 比例 系数 ; 一 Ki 积分 系 数 ; 一速 度 采样 周 期 。 一 T 电流 调 节是 采用 了P 增 量算 法 。电流 的调 整过 I 程就是 P M 信 号产 生 的过 程 。 过 调整P W 通 WM 波 的 宽 度就 可 以调 整 电流 的 平均 值 。P WM 波 的 宽 度 由 参考 电流 与 检测 电流 的 电流 差 决定 。再经 过 P D增 I 量算 法计 算 , 可得 应 输 出的 电流 :
基于DSP的无刷直流电机调速系统的设计与实现中期报告
基于DSP的无刷直流电机调速系统的设计与实现中期报告一、选题背景及研究内容随着科技的不断发展和人们生活水平的提高,各种电动设备的需求量也越来越大,其中就包括了直流电机。
直流电机由于其结构简单、转速范围广、启动扭矩大、效率高等优点,在工业生产、交通运输、家用电器等领域得到广泛的应用。
而无刷直流电机又因其自带调速器、节约能源、使用寿命长、噪音小等优点,越来越受到人们的青睐。
因此,研究无刷直流电机调速系统的设计与实现,对推动工业自动化进程,提高电机使用效率具有重要意义。
本课题研究内容主要包含以下三个方面:1. 无刷直流电机的原理及调速方式的研究:了解无刷直流电机的结构、工作原理及其调速方式,包括电压调速、PWM调速、矢量控制调速等。
2. DSP芯片的应用及程序设计:选用TI公司的TMS320F28335 DSP 芯片,掌握其基本原理及应用,完成编程工作,对芯片进行复位,初始化等操作,并实现EMIF读写的配置。
3. 无刷直流电机控制调速系统的设计与实现:设计实现无刷直流电机控制部分,包括传感器检测、信号处理、速度环控制等。
同时,还需要编写软件算法实现电机控制调速。
二、研究方案1. 硬件设计方案本课题所需要的硬件主要包括电机驱动电路、DSP控制器、编码器等。
经过对市面上各种芯片和器件的调研后,本课题选用TI公司的TMS320F28335系列DSP芯片作为控制器,并选择和配置了合适的驱动模块和编码器。
2. 软件设计方案本课题的软件设计方案主要包括DSP芯片的程序设计和无刷直流电机控制算法的编写。
在程序设计方面,将确立程序框架、编写DSP芯片复位和初始化程序、配置EMIF等;在编写无刷直流电机控制算法方面,将实现传感器检测、信号处理、速度环控制等各个部分,并通过编写PID 控制算法实现电机的控制调速。
三、预期结果在本课题研究完成后,预期可以实现基于DSP的无刷直流电机控制调速系统设计与实现。
总体来说,本设计将可能取得以下成果:1. 熟练掌握无刷直流电机的原理及控制技术,具备一定电机控制设计能力。
基于DSP的直流电机调速系统控制器设计的研究的开题报告
基于DSP的直流电机调速系统控制器设计的研究的开题报告一、选题背景随着工业自动化的不断发展以及节能降耗的需求逐渐增加,直流电机调速系统控制器成为了工业控制领域的重要研究课题之一。
目前,常见的直流电机调速系统控制器存在着调速范围狭窄、控制效果不稳定等问题,严重影响了直流电机系统的稳定运行和应用。
二、研究目的本课题旨在研究基于DSP的直流电机调速系统控制器设计,以提高电机的调速范围和控制效果,实现电机稳定运行和节能降耗的目的。
三、研究内容和方法(一)研究内容:1. 分析直流电机调速系统的基本原理和性能特点。
2. 研究基于DSP的直流电机调速系统控制器设计原理和方法。
3. 设计直流电机调速系统控制器的硬件电路和软件控制程序,并进行仿真和测试。
(二)研究方法:1. 通过文献资料调研、实地调查等方式,深入了解直流电机调速系统的基本原理和性能特点。
2. 采用MATLAB/Simulink软件进行直流电机调速系统模拟和仿真。
3. 通过CCS软件编写控制程序,搭建基于DSP的直流电机调速系统控制器。
4. 在硬件平台上进行实验,测试直流电机调速系统控制器的效果和性能。
四、预期成果本课题预计可以实现以下成果:1. 设计出基于DSP的直流电机调速系统控制器。
2. 实现电机调速范围的拓宽和控制效果的稳定。
3. 实现直流电机系统的稳定运行和节能降耗。
五、研究意义1. 丰富了直流电机调速系统控制器的研究内容和方法,提高了直流电机系统的调速精度和运行稳定性。
2. 为节能降耗和工业自动化提供了技术支持和实践指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
128在当今电气传动领域,由于直流电动机具有极好的运行性能和控制特性,因此在要求速度调节范围宽、响应快的电气传动中,仍广泛采用直流电动机作为执行电机的直流调速系统。
直流电动机具有优良的调速特性,调速平滑,方便,易于在大范围内平滑调速,过载能力大,能受频繁的冲击负载,可实现频繁的无级快速起制动和反转,能满足生产过程自动化系统中的许多特殊运行要求[1]。
所以直流调速系统至今仍然被广泛地用于自动控制要求较高的各种生产部门,是调速系统的主要形式。
近年来,直流电机的控制方式都发生了很大的变化。
随着计算机进入控制领域,以及新型功率电子元器件的不断出现,使采用全控型开关功率元器件进行全数字化直流脉宽调速已成为主流。
随着电子技术,特别是电子计算机的高速发展,带来了伺控制系统向智能化方向的快速发展。
从当前情况看,直流电动机能在大范围内实现精密的速度控制,所以,要求系统调速性能高的场合都在广泛使用直流电机控制系统。
目前直流调速系统在传动领域中仍占重要的地位[2]。
本文在认真学习了直流电机调速原理和数字信号处理芯片工作原理的基础上,以TI公司推出的电机控制专用微处理器TMS320F2812数字信号处理器为系统的控制核心,以L298N集成芯片为直流电机驱动电路,运用PWM技术和PI控制算法对数字直流调速系统进行了设计。
1、基本原理直流电机的主要调速方法直流电动机转速n的表达式: 式(1)式(1)中:U为电枢电压;a I 为电枢电流;R 为电枢电路总电阻;eC 为与电机结构有关的电动势常数;n为转速;为励磁磁通。
由式(1)可知直流电机的主要调速方法有三种。
(1)调压调速—调节电枢电压U,使电机速度在宽广的范围内平滑变化;(2)弱磁调速—改变励磁磁通大小使转速变化,但基于电机铁磁饱和考虑只能在额定速度以上通过弱磁做升速运行,限制了调速范围;(3)串电阻调速—通过增大电枢电阻实现调速,并伴随有巨大的功率损耗、发热和运行效率下降,很少采用。
因此,直流电动机主要采用调压调速方式。
本文设计的直流调速系统采用闭环系统。
闭环系统要在开环系统的基础上加上转速检测环节,如图2.1所示。
目标转速和测速器检测到的电机当前转速相减,结果作为处理器的输入,处理器根据这个结果控制PWM的占空比。
当电机的实际转速比目标转速快时,处理器把PWM的占空比调低,电机的转速变慢。
当电机的实际转速比目标转速慢时,处理器把PWM的占空比调高,电机的转速变快。
如基于dsp直流电机调速系统的设计李方圆 李晓(中北大学信息与通信工程学院 山西太原 030051)摘要:在工程实践中,有许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的静,动态性能。
采用DSP 控制器控制后,整个调速系统实现全数字化,结构简单,可靠性高,操作维护方便,电机稳态运行时转速精度可达到较高水平。
直流电机具有调速平滑,调速范围广等优良的调速特性。
又由于直流调速系统是自动化专业教学的重点,本设计为学生们提供了一个良好的实验平台,同学们可以通过此平台进行直流电机调速的实验,可以通过改变PI 参数理解PID 算法对直流电机启动和调速性能的影响。
关键词:dsp 直流电机 调速中图分类号:TM33文献标识码:A 文章编号:1007-9416(2012)12-0128-03The design of Dc motor speed controlsystem based on DSPLI Fang-yuan,lixiao(1North University of China. The College of Information and Communication, Taiyuan 030051, China)Abstract :In engineering practice, There are many production machinery requirements in a certain range for speed smooth adjustment ,and ask to have good static and dynamic performance. After the controlling of DSP controller the speed control system can realize full digital, simple structure, high reliability, convenient operation and maintenance, and the motor steady state operation speed precision can achieve a higher level. And because of dc speed regulating system is the emphasis of the teaching of automation and this design provides students a good experiment platform, so that Students can experiment through the platform for dc motor speed control ,and they can change the parameters of pi to understand the influence of pid algorithm for dc motors’starting and the performance of speed controlling.Key Words :dsp dc motor speed control图1 PWM 闭环控制系统组成129此反复调节,直到达到目标转速。
测速器可以用光电传感器、霍尔传感器、测速发电机、脉冲编码器等实现。
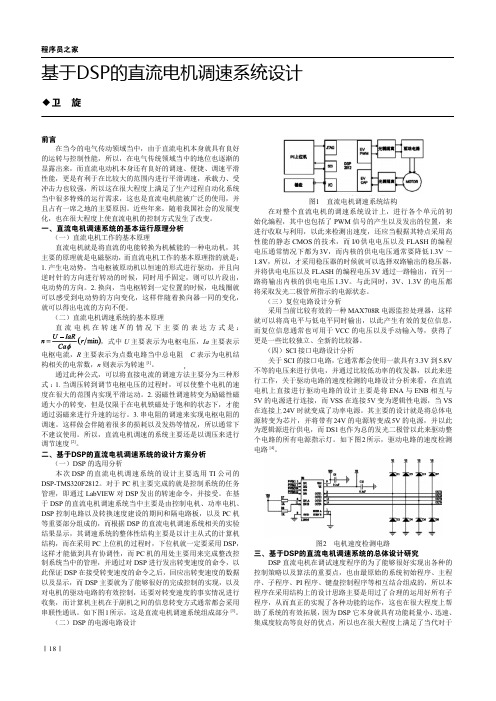
(如图1)2、调速系统整体设计方案基于DSP的数字直流调速系统的硬件结构框图如图2所示。
整个系统由被控电机、功率电路、DSP控制电路、转速检测元件、光耦隔离电路和上位PC机几部分组成。
图2 调速系统硬件结构调速系统实验平台的整体结构为主从式计算机结构。
上位机采用PC机,下位机采用TI公司的DSP-TMS320F2812。
PC机主要完成控制系统任务管理,即通过LabVIEW对DSP发出转速命令,接受DSP返回的转速数据并且对转速进行实时显示。
DSP主要完成控制算法的实现、对电机驱动电路的控制和对转速的实时采集。
主机和从机之间采用串行通讯方式交换信息。
2.1 DSP 控制电路设计(1)DSP电源电路:图3 DSP 电源电路TMS320F2812采用高性能静态CMOS技术, I/O供电电压及FLASH编程电压为3.3V,内核供电电压降为1.8V(135MHz)1.9V(150MHz),故选用TI公司的双路输出低压降稳压器TPS767D318,将输入的5V直流电压稳压输出一路为3.3V,一路为1.8V。
同时5V、3.3V、1.8V电压都采用发光二极管指示电源状态,具体连接关系如图3所示。
(2)复位电路:(如图4)复位电路如图4所示,采用美信公司的MAX708R。
MAX708R是一种微处理器电源监控和看门狗芯片,可同时输出高电平有效和低电平有效的复位信号。
复位信号可由VCC电压、手动复位输入,或由独立的比较器触发。
(3)SCI接口电路:MAX3232是一款3.0V-5.5V供电、低功率的RS232收发器,支持高达1Mbps的通信速率,仅需要四个0.1uF的电容作为外部元件即能工作。
DSP与MAX3232连接关系示意图如图5所示。
TMS320F2812片内集成了两个SCI(串行通信接口)模块,这里使用了它的SCIB,DSP通过SCITXDB(GPIOG4)向PC机发送数据,通过SCITXDB(GPIOG5)接收来自PC机的数据。
图5 串行通信接口电路图6 L298直流电机驱动电路2.2 驱动电路及速度检测电路设计L298驱动电路:L298直流电机驱动电路设计如图6,ENA与ENB接5V电源使能,VSS接5V逻辑电源,VS接24V功率电源,D1到图4 复位电路图7 程序总体结构图130D8为续流二极管,IN1到IN4为5V的PWM逻辑电平输入。
MC7805为电源转换芯片,把24V电源VS转换为5V电源VSS以供给逻辑电平电源,DS1为发光二极管作为驱动电路的电源指示灯。
3、程序总体设计DSP直流电机调速程序是本实验平台实现各种控制策略、控制算法的核心所在,由系统初始化程序、主程序、中断服务子程序、PI子程序、键盘控制子程序等组成。
程序采用结构化模块设计思路,通过调用子程序模块来实现各种功能,便于系统的扩展。
DSP应用程序的总体结构如图7。
程序中首先完成键盘按键的宏定义,中断函数的声明,各个子函数的声明以及系统用到的所有变量的定义。
然后对系统及各个外设模块进行初始化。
最后程序进入一死循环,等待中断和按键按下。
中断子程序由定时器T1周期中断、定时器T2周期中断、捕获中断和SCI中断子程序构成。
4、系统调试结果本文设计了数字直流电机的脉宽调速系统硬件和软件,在设计这个实验平台后进行了物理实验验证。
直流电机参数如下:额定功率:35w额定转速:5000rpm额定电流:1.4A额定电压:24V4.1 硬件系统连线硬件系统连接如图8所示。
图8 硬件系统连接图图9 电机启动波形4.2 启动过程波形转速由0到2000rpm启动,LabVIEW采集的启动过程速度波形如图9所示。
其上升时间大约2秒,运行状态比较稳定。
图10 电机1000转/分时的速度曲线图11 电机1500转/分时的速度曲线4.3 不同转速时的波形把电机速度分别设定为1000 rpm,1500 rpm,2000 rpm和2500rpm时的速度波形分别如图10,11,12和13所示。
图12 电机2000转/分时的速度曲线图13 电机2500转/分时的速度曲线5、结语近年来,由于电力电子器件、微处理器的发展和控制技术的进步,对直流电机控制系统向全数字化的发展产生了巨大的推动作用。
DSP具有功耗小、速度快、集成度高等优点,不仅可以满足电机调速的要求,又能很大程度地减小硬件资源的使用,所以采用DSP作为微控制器为核心是电动机控制技术的发展方向。
参考文献[1]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006.[2]贺益康,徐大中.电机控制[M].杭州:浙江大学出版社,2010.[3]陈锡辉,张银鸿.LabVIEW8.20程序设计从入门到精通[M].北京:清华大学出版社,2007.[4]胡仁喜.LabVIEW8.21虚拟仪器实例指导教程[M].北京:机械工业出版社,2008.[5]孙增圻.计算机控制理论与应用[M].北京:清华大学出版社,2008.[6]孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008.[7]刘锦波,张承慧.电机与拖动[M].北京:清华大学出版社,2006.[8]苏奎峰,吕强.TMS320X281x DSP原理及C程序开发[M].北京:北京航空航天大学出版社,2008.[9]TMS320C28x DSP CPU and Instruction Set Reference Guide.Literature Number:SPRU430B August 2001-Revised May 2002.82.[10]TMS320F28xEvent Manager(EV)Peripheral Reference Guide .Literature Number:SPRU065 May 2002.53~71.[11]吴红星.电动机驱动与控制专用集成电路应用手册[M].北京:中国电力出版社,2009.。