萨牌仪表说明书_叉车资料
萨牌仪表说明书 叉车资料

1 特性1.1 特点1.萨牌MDI多功能数字仪表是一个显示器,它适用于所有装有ZAPI高频电控器的各种形式的电动车辆。
2.萨牌MDI多功能数字仪表的信号取自斩波器,而不是电瓶,这样不同电压等级的车辆也可用同一仪表。
3.电瓶的放电状态由微处理器进行一定的换算模拟获得。
该换算考虑了制动及起动等大电流工况对电瓶的影响。
4.用萨牌MDI数字式手持单元,可以选择100种不同放电曲线。
5.萨牌MDI多功能数字仪表是一个以微处理器为基础的系统。
对电瓶放电状态测量是高精度的,具有很高的可靠性和灵敏度。
同时萨牌MDI多功能数字仪表还可以显示工作小时。
6.萨牌MDI多功能数字仪表有三个内部功能。
●显示放电状态。
●工作小时。
●显示控制系统故障。
7.萨牌MDI多功能数字仪表不直接连到电瓶,她仅与斩波器相连。
与传统显示仪表相比,萨牌MDI多功能数字仪表无需复杂接线,也节省了安装时间。
1.2 显示功能说明1.2.a 发光二极管显示功能萨牌MDI多功能数字仪表用发光二极管显示电瓶放电状态。
萨牌MDI多功能数字仪表有五个发光二极管,一红四绿,表示电瓶的放电状态。
充足电时,四个绿色发光二极管全亮。
随着电瓶不断放电,四个绿灯随电瓶剩余电量的减少逐步并按一定顺序熄灭,直至电瓶放完电,红灯开始闪烁,表示电瓶已开始过放电,斩波器进入低电压保护状态。
1.2.b 液晶显示功能小时计:在萨牌MDI多功能数字仪表中部装有液晶显示器,它可以用来显示1.工作小时2.系统故障,萨牌MDI多功能数字仪表显示故障状态时是以相应的代码表示,故障发生时,红色发光二极管将开始闪烁,以引起注意。
3.软件版本:电锁刚闭合时,萨牌MDI多功能数字仪表显示EPROM中的软件版本,即EP××,同时出现扳手图案。
4.其它信息,萨牌MDI多功能数字仪表上有三种图案,分别告知司机下列信息:乌龟图案:表示车辆处在“软”方式工作状态,在这种状态下,最大速度和加速度都被减小了。
萨牌双交流电控DUALAC2说明书
目录1 简介2 规范2.1D U A L A C2的技术规范 52.2D U A L A C2&H P的技术规范 62.3D U A L A C2P O W E R(加强型)的技术规范72.4D U A L A C2&H P P O W E R(加强型)的技术规范82.5控制单元82.5.1微动开关82.5.2加速单元82.5.3其他模拟控制单元92.5.4速度反馈92.5.5转向角传感器10 2.6保护特性11 2.7操作特性12 2.8故障诊断13 2.9热保护措施13 2.10常规问题的解决与防范13 2.11磁化与磁辐射13 2.12主接触器与应急开关14 3安全与保护14 4、安装144.1连接电缆14 4.2接触器15 4.3熔断器15 4.4“D U A L A C2”与“D U A L A C2”加强型的接线说明15 4.5“D U A L A C2”与“D U A L A C2&H P”加强型的接线说明174.6编码器安装194.7C A N B U S连接器的结构194.7.1单个D U A L A C2控制器194.7.2“D U A L A C2”作为C A N B U S网络的终端模块204.7.3“D U A L A C2”作为循环模块接入C A N B U S网络204.8电源接线图214.8.1“D U A L A C2”214.8.2“D U A L A C2加强型”224.8.3“D U A L A C2&H P”234.8.4“D U A L A C2&H P加强型”244.9机械图254.10“D U A L A C2”与“D U A L A C2加强型”标准接线图294.11“D U A L A C2&H P”与“D U A L A C2&H P加强型”标准接线图305、利用手持单元的编程及调整315.1使用手持单元调整31 5.2手持单元及连接器接线的描述315.3标准手持单元菜单的介绍32 5.3.1“D U A L A C2”与“D U A L A C2加强型”菜单结构325.3.1a主菜单325.3.1b从菜单335.3.2“D U A L A C2&H P”与“D U A L A C2&H P加强型”菜单设置345.3.2a主菜单345.3.2b从菜单355.4功能设置35 5.4.1“D U A L A C2”与“D U A L A C2加强型”—主控制部分35 5.4.2“D U A L A C2”与“D U A L A C2加强型”—从控制部分375.4.3“D U A L A C2&H P”与“D U A L A C2&H P加强型”—主控制部分功能38 5.4.4“D U A L A C2&H P”与“D U A L A C2&H P加强型”—从控制部分功能385.5参数调节40 5.5.1“D U A L A C2”—主控制部分40 5.5.2“D U A L A C2”—从控制部分41 5.5.3“D U A L A C2&H P”—主控制部分415.5.4“D U A L A C2&H P”—从控制部分425.6可编程的控制器的功能46 5.6.1功能设置(参见 5.4)465.6.2参数编程(参见 5.5)465.6.3“D U A L A C2&H P”与“D U A L A C2&H P加强型”测试465.6.4“D U A L A C2&H P”与“D U A L A C2&H P加强型”测试475.6.5储存功能(存储数据)—仅适用于P C控制47 5.6.6复制功能(下载参数用于其他控制)—仅适用于P C手持单元47 5.6.7显示最后5次报警信息,连同小时计值,温度一起显示47 5.6.8加速器范围整定48 5.6.9参见手持单元手册对于功能和参数的详细说明485.7A C牵引逆变器设置顺序485.8测试功能描述48 5.8.1“D U A L A C2”与“D U A L A C2加强型”—主控制部分495.8.2“D U A L A C2”与“D U A L A C2加强型”—从控制部分50 5.8.3“D U A L A C2&H P”与“D U A L A C2&H P加强型”—主控制部分515.8.4“D U A L A C2&H P”与“D U A L A C2&H P加强型”—从控制部分526、其他功能54 6.1保存与复制功能54 6.2报警菜单描述54 6.3手持单元整定加速器操作过程557、“D U A L A C2”与“D U A L A C2&H P”故障诊断56 7.1与牵引相关的错误编码56 7.2手持单元显示的关于牵引相关的报警分析60 7.3与泵斩波器相关的故障编码647.4手持单元显示的关于油泵方面的报警分析658、推荐使用部件659、定期维护67= 凡标注此记号的章节是与安全相关的内容签名表公司DEPT.设备执行经理工程执行部分出货管理员出版物编号:版本1 简介ZAPIMOS系列中的DUAL AC2逆变器适合用于3—7KW一对电机控制。
Ae0zp0ba (AC0-ing)

INDEXPage 1Introduction (3)2Specification (3)2.1Technical specifications (3)2.2Control unit (4)2.2.a Microswitches (4)2.2.b Accelerator unit (4)2.2.c Other analog control unit (5)2.2.d Speed feedback (5)2.3Protection features (6)2.4Operational features (7)2.5Diagnosis (8)2.6Thermal consideration (8)2.7General instructions and precautions (8)2.8Susceptibility and electromagnetic emission (9)2.9Main contactor and emergency switch (9)3Installation (10)3.1Connection cables (10)3.2Contactors (10)3.3Fuses (10)3.4Description of connectors - Standard version (11)3.5Description of connectors - MDI PRC Version (13)3.6Encoder installation (15)3.7Description of power connections (16)3.8Mechanical drawing (17)3.9Connection drawing - Standard Version (18)3.10Connection drawing - MDI PRC Version (19)4Programming & Adjustments using Digital Console (20)4.1Adjustments via Console (20)4.2Description of Console & Connection (20)4.3Description of Standard Console Menu (21)4.3.a Standard Version (21)4.3.b MDI PRC Version (22)4.4Function configuration (23)4.4.a Standard Version (23)4.4.b MDI PRC Version (28)4.5Parameter regulation: Standard Version (37)4.6Parameter regulation: MDI PRC Version (39)4.7Programming console functions (43)4.8Sequence for Ac Inverter Traction setting (44)4.9Tester: description of the function; Standard Version (45)4.10Tester: description of the function; MDI PRC Version (48)=The informations included into the marked paragraphs by this symbol areessential for the safety.SIGNATURES TABLE SE C I V R E S .T P E D Y N A P M O C EM V I T U C E X E T N E M E G A N A EV I T U C E X E N O I T C E S G N I R E E N I G N E R E G A N A M T R O P X E Publications N°: AE0ZP0BAEdition: October 20015Other functions............................................................................................515.1Description of the Console Save function .............................................515.2Description of Console Restore function...............................................525.3Description of Alarms menu .................................................................535.4Description of Console Program Vacc function (546)AC0 Inverter diagnostic...............................................................................556.1Analysis of alarms displayed on console . (557)Recommended Spare parts for inverter ....................................................608Periodic Maintenance to be repeated at times indicated.. (61)1 INTRODUCTIONThe AC0 inverter has been developed for applications such as transpallet trucks, stacker trucks and cleaning machines with traction motors up to 1.2KW (Vbatt=24V) and 1.8KW (Vbatt=36V). This model is available in the standard format, using an encoder, but it's also thought (work in progress) for sensorless control (no shaft encoder is required). The AC0 can directly replace an AC1 inverter having exactly the same I/O connections and param-eter settings. The only differences are the maximum current (150A vs. 250A), the dimen-sions, and the input CNA #13 which is reserved for an analogue motor sensor.2 SPECIFICATION2.1 TECHNICAL SPECIFICATIONSInverter for AC asynchronous 3-phase motorsRegenerative brakingCan-bus interfaceDigital control using a microcontroller Voltage:.......................................................................................................24 - 36V Maximum current (24V,36V):.........................................................150A (RMS) for 2' Booster (all version):......................................................170A (RMS) for 10 seconds Operating frequency:..........................................................................................8kHz External temperature range:.................................................................-30°C ÷ 40°C Maximum inverter temperature (at full power):....................................................78°C Encoder Interface2.2 CONTROL UNIT2.2.a Microswitches-The microswitches must have a contact resistance lower than 0.1Ω and a leakage current lower than 100µA.-When full load connected, the voltage between the key switch contacts must be lower than 0.1V.-The microswitches send a voltage signal to the microprocessor when a function request (for ex.: running request) is made.2.2.b Accelerator unitThe accelerator unit can consist of a potentiometer or an Hall effect device.It should be in a 3-wire configuration.CPOT (B10) signal ranges from 0 to 10V.Potentiometer value should be in the 0.5 - 10 KΩ range; generally, the load should be in the(PROGRAM VACC function), in either direction. This function is unique when it is neces-sary to compensate for asymmetry with the mechanical elements associated with theThe two graphs show the output voltage from a non-calibrated potentiometer withrespect to the mechanical “zero” of the control lever. MI and MA indicate the point where the direction switches close. 0 represents the mechanical zero of the rotation.The Left Hand graph shows the relationship of the motor voltage without signal acquisition being made. The Right Hand Graph shows the same relationship after signal acquisition of the potentiometer.2.2.c Other analog control unitInput A18 is an analog input, whose typical application is for proportional braking. It should be in a 3 wire configuration. Potentiometer value should be in the 0.5-10KΩ range. Gener-ally, the load should be in the 1.5mA to 30 mA range.The CPOTB (A18) signal range is from 0 to 10V.2.2.d Speed feedbackThe motor control is based upon the motor speed feedback. The speed transducer is an incremental encoder, with two phases shifted at 90°. The encoder can be of different types: -power supply:+5V or +12V-electric output:open collector ( NPN or PNP), push-pull.For more details about encoder installation see also chapter 3.6.2.3 PROTECTION FEATURES-Battery polarity inversionIt is necessary to fit a MAIN CONTACTOR to protect the inverter against reverse battery polarity and for safety reasons.-Connection ErrorsAll inputs are protected against connection errors.-Thermal protectionIf the chopper temperature exceeds 78°C, the maximum current is reduced inproportion to the thermal increase. The temperature can never exceeds 100°C.-External agentsThe inverter is protected against dust and the spray of liquid to a degree ofprotection meeting IP54.-Protection against uncontrolled movementsThe main contactor will not close if:-The Power unit is not functioning.-The Logic is not functioning perfectly.-the output voltage of the accelerator does not fall below the minimum voltage value stored, with 1V added.-Running microswitch in closed position.-Low battery chargewhen the battery charge is low, the maximum current is reduced to the half of the maxi-mum current programmed.-Protection against accidental Start upA precise sequence of operations are necessary before the machine will start.Operation cannot begin if these operations are not carried out correctly.Requests for drive, must be made after closing the key switch.2.4 OPERATIONAL FEATURES-Speed control.-Optimum behaviour an a slope due to the speed feedback:-the motor speed follows the accelerator, starting a regenerative braking if the speed overtakes the speed set-point.-the system can perform an electrical stop on a ramp (the machine is electrically hold on a slope) for a programmable time (see also chapter 4)-Stable speed in every position of the accelerator.-Regenerative release braking based upon deceleration ramps.-Regenerative braking when the accelerator pedal is partially released (deceleration).-Direction inversion with regenerative braking based upon deceleration ramp.-Regenerative braking and direction inversion without contactors: only the main contactor is present.-The release braking ramp can be modulated by an analog input, so that a proportional brake feature is obtained.-Optimum sensitivity at low speeds.-Voltage boost at the start and with overload to obtain more torque (with current control). -The inverter can drive an electromechanical brake-High efficiency of motor and battery due to high frequency commutations.-Self diagnosis.-Modification of parameters through the programming console.-Internal hour-meter with values that can be displayed on the console.-Memory of the last five alarms with relative hour-meter and temperature displayed on the console.-Test function within console for checking main parameters.2.5 DIAGNOSISThe microprocessor continually monitors the inverter and carries out a diagnostic proce-dure on the main functions. The diagnosis is made in 4 points1)Diagnosis on key switch closing that checks: watchdog circuit, current sensor, capaci-tor charging, phase's voltages, contactor drives, can-bus interface, if the switch se-quence for operation is correct and if the output of accelerator unit is correct.2)Standby diagnosis at rest that checks: watchdog circuit, phase's voltages, contactordriver, current sensor, can-bus interface.3)Diagnosis during operation that checks: watchdog circuits, contactor driver, currentsensors, can-bus interface.4)Continuos diagnosis that check: temperature of the inverter, motor temperature. Diagnosis is provided in two ways. The digital console can be used, which gives a detailed information about the failure; the failure code is also sent on the Can-Bus.2.6 THERMAL CONSIDERATION-The heat generated by the power block must be dissipated. For this to be possible, the compartment must be ventilated and the heat sink materials ample.-The heat sink material and system should be sized on the performance requirement of the machine. Abnormal ambient air temperatures should be considered. In situations where either ventilation is poor, or heat exchange is difficult, forced air ventilation should be used.-The thermal energy dissipated by the power block module varies and is dependent on the current drawn and the duty cycle.2.7 GENERAL INSTRUCTIONS AND PRECAUTIONS-Never connect SCR low frequency chopper with ASYNCHRONOUS INVERTER be-cause the ASYNCHRONOUS filter capacitors alter the SCR choppers' work. If it is necessary to use two or more control units (traction + lift. for ex.), they must belong to the ZAPIMOS family.-Do not connect the inverter to a battery with a nominal value different from the value indicated on the chopper plate. If the battery value is greater, the MOS may fail; if it is lower, the control unit does not "power up".-During battery charge, disconnect ASYNCHRONOUS from the battery.-Supply the ASYNCHRONOUS only with battery for traction; do not use a power supply. -When the inverter is installed, make tests with the wheels raised from the ground, in order to avoid dangerous situations due to connection errors.-After the chopper is switched off (key off), the filter capacitor remains charged for some minutes; if you need to work on the inverter, discharge them using a10Ω ÷ 100Ω resistance connected from the +Batt to the -Batt.2.8 SUSCEPTIBILITY AND ELECTROMAGNETIC EMISSION Electromagnetic susceptibility and emission are strongly influenced by the installation. Special attention must be given to the lengths and the paths of the electric connections and the shields.This situation is beyond ZAPI's control. Therefore ZAPI declines any responsibility for noncompliance if correct testing is not made (the irradiated emission directive isEN50081-2).2.9 MAIN CONTACTOR AND EMERGENCY SWITCH-The connection of the battery line switches must be carried out following ZAPI instruc-tions.-If a mechanical battery line switch is installed, it is necessary that the key supply to the inverter is open together with power battery line; if not, the inverter may be-connection overtakes 40% more than the battery nominal voltage or if the key isswitched off before the battery power line is disconnected.3 INSTALLATIONInstall the chopper with the base-plate on a flat metallic surface that is clean and unpainted. Apply a light layer of thermo-conductive grease between the two surfaces to permit better heat dissipation.Ensure that the wiring of the cable terminals and connectors is carried out correctly.Fit transient suppression devices to the horn, solenoid valves, and contactors not con-nected to the chopper such as those for activating the pump motor or steering motor.3.1 CONNECTION CABLESFor the auxiliary circuits, use cables of 0.5mm² section.For power connections to the motor and to the battery, use cables having sectionof 16 mm² (as a minimum).For the optimum inverter performance, the cables to the battery should be run side by side and be as short as possible.3.2 CONTACTORSThe main contactor must be installed. Depending on the setting of a parameter (see op-tion menu):-the output which drives the main contactor coil is on/off (the coil is driven with the full battery voltage).-the output which drives the main contactor coil is switched at high frequency (1 KHz) with a programmable duty cycle; this feature is useful to decrease the power dissipa-tion of the contactor coil.3.3 FUSES-Use a 6.3A Fuse for protection of the auxiliary circuits.-For protection of the power unit, refer to diagrams.. The Fuse value shown is the maxi-mum allowable. For special applications or requirements these values can be reduced. -For Safety reasons, we recommend the use of protected fuses in order to prevent the spread of fused particles should the fuse blow.A1NLCA2PLC , PEB Positive of main contactor coil and (optional) electromechanicalbrake coil.A3NBRAKE Output for driving the electromechanical brake coil; drives the load to -Batt. Maximum current : 3A.A4NPC Negative of pump contactor coil.A5PPC , PEV Positive of pump contactor coil and lowering electrovalve coil.A6NEV Negative of the lowering electrovalve coil.A7CAN-L Low level CAN-BUS voltage I/O.A8NPOTB-Batt.A9ENCODER Incremental ENCODER (see chapter 3.6).A10ENCODER Incremental ENCODER (see chapter 3.6).A11HM Output for driving an hourmeter; when the hourmeter is active thisoutput provides a +Batt signal; 3A maximum current.A12-BATT-Batt.A13THM Motor thermal sensor input. The internal pull-up is a fixed 2mA (Max5V) source current.A14SR2Speed reduction 2 input. Active low (switch opened).A15SR3Speed reduction 3 input. Active low (switch opened).A16+12V This output provides a +12V signal for thr MDI PRC, if present;100mA maximum current.A17CAN-H High level CAN-BUS voltage I/O.A18CPOTB Brake potentiometer wiper.A19ENCODER Incremental ENCODER (see chapter 3.6).A20ENCODER Incremental ENCODER (see chapter 3.6).B1KEY Connected to the power supply through a microswitch (KEY) with a10A fuse in series (this could be mounted on the AC0 cover).B2CM Common of FW / BW / SR1 / SR2 / SR3 / TILLER / H&S / BELLY /LIFTING / LOWERING microswitches.B3TILLER Tiller request input. Must be connected to the tiller microswitch,active high.B4H&S Hard & Soft request input. Must be connected to the Hard & Softmicroswitch, active high.B5BACKWARD Backward direction request input. Must be connected to the back-ward direction microswitch, active high.B6FORWARD Forward direction request input. Must be connected to the forwarddirection microswitch, active high.B7BELLY Quick inversion function input; must be connected to the Bellymicroswitch; it is active high.B8LOWERING Lowering request input, active high.B9LIFTING Lifting request input, active high.B10CPOT Accelerator potentiometer wiper.B11NPOT Negative of accelerator unit, tested for wire disconnection diagnosis. B12PPOT Potentiometer positive: 10V output; keep load > 1KΩ.C1PCLRXD Positive serial reception.C2NCLRXD Negative serial reception.C3PCLTXD Positive serial transmission.C4NCLTXD Negative serial transmission.C5GND Negative console power supply.C6+12Positive console power supply.C7FLASH Must be connected to C8 for the Flash memory programming (ifused).C8FLASH Must be connected to C7 for the Flash memory programming (ifused).A1NLCA2PLC , PEB Positive of main contactor coil and (optional) electromechanicalbrake coil.A3NBRAKE Output for driving the electromechanical brake coil; drives the load to -Batt. Maximum current : 3A.A4NPC Negative of pump contactor coil.A5PPC , PEV Positive of pump contactor coil and of the auxiliary output load.A6NEV Negative of the auxiliary output.A7CAN-L Low level CAN-BUS voltage I/O.A8NPOTB-Batt.A9ENCODER Incremental ENCODER (see chapter 3.6).A10ENCODER Incremental ENCODER (see chapter 3.6).A11PEV (+B)This output provides a +Batt for the electrovalves coils connected tothe MDI PRC; 3A maximum current.A12-BATT-Batt.A13THM Motor thermal sensor input. The internal pull-up is a fixed 2mA (Max5V) source current.A14LIFT AUX.Auxiliary lifting request input, active high.A15LOW AUX.Auxiliary lowering request input, active high.A16+12V This output provides a +12V signal for the MDI PRC; 100mA maxi-mum current.A17CAN-H High level CAN-BUS voltage I/O.A18CPOTB Proportional electrovalves potentiometer wiper.A19ENCODER Incremental ENCODER (see chapter 3.6).A20ENCODER Incremental ENCODER (see chapter 3.6).B1KEY Connected to the power supply through a microswitch (KEY) with a10A fuse in series (this can be mounted on the AC0 cover).B2CM Common of FW / BW / SR1 / LIFT AUX / LOW AUX / TILLER / H&S/ BELLY / LIFTING / LOWERING microswitches.B3TILLER Tiller request input. Must be connected to the tiller microswitch,active high.B4H&S Hard & Soft request input. Must be connected to the Hard & Softmicroswitch, active high.B5BACKWARD Backward direction request input. Must be connected to the back-ward direction microswitch, active high.B6FORWARD Forward direction request input. Must be connected to the forwarddirection microswitch, active high.B7BELLY Quick inversion function input; must be connected to the Bellymicroswitch; it is active high.B8LOWERING Lowering request input, active high.B9LIFTING Lifting request input, active high.B10CPOT Accelerator potentiometer wiper.B11NPOT Negative of accelerator unit, tested for wire disconnection diagnosis. B12PPOT Potentiometer positive: 10V output; keep load > 1KΩ.C1PCLRXD Positive serial reception.C2NCLRXD Negative serial reception.C3PCLTXD Positive serial transmission.C4NCLTXD Negative serial transmission.C5GND Negative console power supply.C6+12Positive console power supply.C7FLASH Must be connected to C8 for the Flash memory programming (ifused).C8FLASH Must be connected to C7 for the Flash memory programming (ifused).3.6 ENCODER INSTALLATION1)AC0 card is fit for different types of encoder. To control AC motor with Zapi inverter, itis necessary to install an incremental encoder with 2 phases shifted of 90°. The en-coder power supply can be +5 or +12V. It can have different electronic output.A9+5V/+12V positive of encoder power supply.A10GND negative of encoder power supply.A19A phase A of encoder.A20B phase B of encoder.2)3)It is necessary to specify in the order the type of encoder used, in terms of power supply, electronic output and n° of pulses for revolution, because the logic unit must be set in the correct way by Zapi.3.7 DESCRIPTION OF POWER CONNECTIONS-BATT+BATT Positive of the battery.FU; FV; FW Connection bars of the three motor phases; follow this sequence and the indication on the motor.4 PROGRAMMING & ADJUSTMENTS USING DIGITAL CONSOLE4.1 ADJUSTMENTS VIA CONSOLEAdjustment of Parameters and changes to the inverter’s configuration are made using the4.3 DESCRIPTION OF STANDARD CONSOLE MENU 4.3.a Standard Version4.4 FUNCTION CONFIGURATION4.4.a Standard VersionSUBMENU "SET OPTIONS"1TILLER SWITCH-HANDLE input B3 is managed as a tiller input.-SEAT input B3 is managed as a seat input.2SET INPUT #1-OPTION #1:input A13 is managed as a motor thermal sensor analog input.-OPTION #2:input A13 is managed as a cutback speed input (SR#1 - HWmodification required).-OPTION #3:input A13 is managed as an handbrake input (HW modificationrequired).3SET INPUT #2-PRESENT:input A14 is managed as a cutback speed input (SR#2).-OPTION #1:input A14 is managed as an "Inching Forward" input.4SET INPUT #3-PRESENT:input A15 is managed as a cutback speed input (SR#3).-OPTION #1:input A15 is managed as an "Inching Backward" input.5SET INPUT #4-BELLY:input B7 is managed as a belly input.-BRAKE:input B7 is managed as a service brake input.-EX. HYDRO:input B7 is managed as a "Exclusive Hydro" input.6HOUR COUNTER-RUNNING:the counter registers travel time only.-KEY ON:the counter registers when the "key" switch is closed.7BATTERY CHECK-ON:the battery discharge level check is carried out; when thebattery level reaches 10%, an alarm is signalled and themaximum current is reduced to the half of the programmedvalue.-OFF:the battery discharge level check is carried out but no alarm issignalled.8HYDRO KEY ON-ON / OFF:if this option is programmed ON the traction inverter managesan hydraulic steering function when the "key" is switched ON(only if the "aux output #1" option is programmed as "hydrocontactor" or as "exclusive hydro").9STOP ON RAMP-ON:the stop on ramp feature (truck electrically hold on a ramp) ismanaged for a time established by "auxiliary time" parameter.After this time, the behaviour depends on the "aux output #1"option programmation (see also the following table).-OFF:the stop on ramp feature is not performed.10AUX OUTPUT #1-BRAKE:output A3 drives an electromagnetic brake coil (see also thetable below).-HYDRO CONT.:the inverter manages an hydraulic steering function when thedirection input or brake pedal input are active or a movementof the truck is detected.-EX. HYDRO:output A3 drives an hydraulic steering function when theexclusive hydro input is active.-FREE:output A3 not used.11PEDAL BRAKING-ANALOG:Option "Set input #4" programmed "Belly":the mechanical brake pedal has a potentiometer installed.When the accelerator is released and the pedal brake ispushed the inverter performs an electrical braking whoseintensity is proportional to the brake pedal potentiometer. Theminimum intensity is established by the "Release braking"parameter, when the brake pedal is slightly pressed (brakepotentiometer at the minimum). The maximum intensity isestablished by the "Pedal braking" parameter when the brakepedal is fully pressed (brake potentiometer at the maximum). Inthe middle positions, the electrical braking intensity is a linearfunction between minimum and maximum intensity.Option "Set input #4" programmed "Brake":the mechanical brake pedal has a switch and a potentiometerinstalled. When the accelerator is released and the pedalbrake is pushed the inverter performs an electrical brakingwhose intensity is proportional to the brake pedalpotentiometer. The minimum intensity is established by the"Release braking" parameter, when the brake pedal is slightlypressed (brake switch closed but brake potentiometer at theminimum). The maximum intensity is established by the "Pedalbraking" parameter when the brake pedal is fully pressed(brake potentiometer at the maximum). In the middle positions,the electrical braking intensity is a linear function betweenminimum and maximum intensity.-DIGITAL:The truck does not have a potentiometer installed on themechanical brake pedal, but only a microswitch; when theaccelerator pedal is released and the brake pedal is pushed(brake switch closed), the inverter performs an electricalbraking following "Pedal braking" parameter.-NONE:Means that there aren't any switch or potentiometer installed onthe brake.12QUICK INVERSION-NONE The quick inversion function is not managed.-TIMED The quick inversion function is timed.-BELLY The quick inversion function is managed but not timed.13AUX VOLTAGE #1-%this parameter permits to program the supply voltage of themain contactor coil and the electromechanical brake.14PERFORMANCE-OPTION #1Set of parameter which determines a "Low Performance".-OPTION #2Set of parameter which determines a "High Performance".SOTTOMENU' "ADJUSTMENT"1SET POT BRK MIN:records the minimum value of braking pedal potentiometerwhen the braking pedal switch is closed; the procedure issimilar to the "Program Vacc" function (see chapter 5.4). Thisprocedure must be carried out only if the "Pedal braking"option is programmed as "Analog".2SET POT BRK MAX:records the maximum value of braking pedal potentiometerwhen the braking pedal is fully pressed; the procedure is simi-lar to the "Program Vacc" function (see chapter 5.4). Thisprocedure must be carried out only if the "Pedal braking"option is programmed as "Analog".3MOTOR OVERTEMP:if the temperature of the motor is higher than the specifiedvalue, a motor temperature warning occurs.4SET MOT TEMP:fine adjustment of the temperature of the motor measured bythe controller.5SET BATTERY TYPE:selects the nominal battery voltage.6ADJUST BATTERY:fine adjustment of the battery voltage measured by thecontroller.7THROTTLE 0 ZONE:establishes a deadband in the accelerator input curve (seealso curve below).8THROTTLE X POINT:These parameter change the characteristic of the acceleratorinput curve.9handbook14 CHECK UP TYPE:for an explanation of this point see the MDI instrumenthandbookAUX OUTPUTSTOPONRAMPA3OUTPUTBEHA VIOUR ON A SLOPEBRAKE ON -Drives the coil of a electromagneticbrake.The truck is electrically hold on aslope; when the time set by"auxiliary time" parameter is elapsedthe brake is applied and the 3-phase bridge is released. Do notuse this combination if thenegative brake is not installed.BRAKE OFF -Drives the coil of a electromagneticbrake.The truck is not electrically hold ona slope, but comes down veryslowly; when the time set by"auxiliary time" parameter iselapsed, the brake is applied andthe 3-phase bridge is opened. Donot use this combination if thenegative brake is not installed.HYDRO CONT.ON-Drives the coil of a hydraulicsteering contactor.The truck is electrically hold on aslope; when the time set by"auxiliary time" parameter iselapsed, the truck comes down veryslowly, till the flat is reached.HYDRO CONT.OFF-Drives the coil of a hydraulicsteering contactor.The truck is not electrically hold ona slope, but comes down veryslowly till the flat is reached.EXCL. HYDRO ON-Drives the coil of a hydraulicsteering contactor.The truck is electrically hold on aslope; when the time set by"auxiliary time" parameter iselapsed, the truck comes down veryslowly, till the flat is reached.EXCL. HYDRO OFF-Drives the coil of a hydraulicsteering contactor.The truck is not electrically hold ona slope, but comes down veryslowly till the flat is reached.。
ZAPI表调整说明 叉车资料
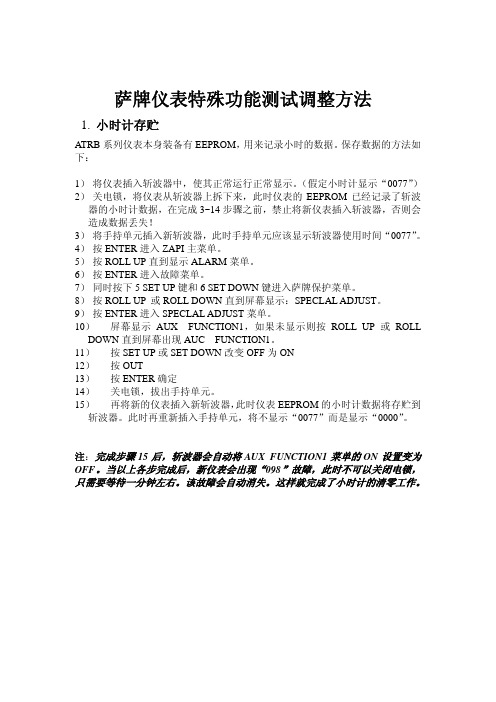
萨牌仪表特殊功能测试调整方法1. 小时计存贮ATRB系列仪表本身装备有EEPROM,用来记录小时的数据。
保存数据的方法如下:1)将仪表插入斩波器中,使其正常运行正常显示。
(假定小时计显示“0077”)2)关电锁,将仪表从斩波器上拆下来,此时仪表的EEPROM已经记录了斩波器的小时计数据,在完成3~14步骤之前,禁止将新仪表插入斩波器,否则会造成数据丢失!3)将手持单元插入新斩波器,此时手持单元应该显示斩波器使用时间“0077”。
4)按ENTER进入ZAPI主菜单。
5)按ROLL UP直到显示ALARM菜单。
6)按ENTER进入故障菜单。
7)同时按下5 SET UP键和6 SET DOWN键进入萨牌保护菜单。
8)按ROLL UP 或ROLL DOWN直到屏幕显示:SPECLAL ADJUST。
9)按ENTER进入SPECLAL ADJUST菜单。
10)屏幕显示AUX FUNCTION1,如果未显示则按ROLL UP或ROLL DOWN直到屏幕出现AUC FUNCTION1。
11)按SET UP或SET DOWN改变OFF为ON12)按OUT13)按ENTER确定14)关电锁,拔出手持单元。
15)再将新的仪表插入新斩波器,此时仪表EEPROM的小时计数据将存贮到斩波器。
此时再重新插入手持单元,将不显示“0077”而是显示“0000”。
注:完成步骤15后,斩波器会自动将AUX FUNCTION1菜单的ON设置变为OFF。
当以上各步完成后,新仪表会出现“098”故障,此时不可以关闭电锁,只需要等待一分钟左右。
该故障会自动消失。
这样就完成了小时计的清零工作。
2.电瓶电量放电曲线修正1)按ENTER进入ZAPI主菜单2)按ROLL UP直到显示ALARM菜单3)按ENTER进入故障菜单4)同时按下5键和6键进入萨牌保护菜单5)按ROLL UP或ROLL DOWN直到屏幕显示:SPECIAL ADJUST6)按ENRER进入SPECIAL ADJUST菜单7)屏幕显示AUX FUNCTION18)按ROLL UP或ROLL DOWN直到出现ADJUSTMENT#01和ADJUSRMENT#029)按SET UP或SET DOWN改变ADJUSTMENT#01和ADJUSTMENT#02的LEVEL值10)按OUT11)按ENTER确定ADJUSTMENT#01 修正电瓶电量100%~90%的上限值。
叉车使用说明范文

叉车使用说明范文叉车是一种用于搬运和堆放货物的机械设备,广泛应用于物流、仓储和制造行业。
使用叉车可以有效提高工作效率和减少劳动强度,但同时也需要注意安全操作。
以下是关于叉车使用的详细说明。
一、叉车的构造和主要部件1.起重部分:包括质量块、滑板、门架和叉形叉臂等,用于提升和搬运货物。
2.驱动系统:叉车一般采用电动、液压或燃油驱动系统,提供动力驱动整车行驶。
3.轮胎:叉车通常配备固体胎或气囊式轮胎,以提供稳定的支撑和操控能力。
4.操纵系统:包括方向盘、操纵杆和控制按钮等,用于驾驶员操纵叉车的行驶和运输动作。
5.安全装置:包括警示灯、报警器、辐射支撑杆等,用于提醒周围人员并保障操纵员的安全。
二、叉车的安全操作1.驾驶员应具备相关的职业技能和操作经验,并经过专门培训和持有叉车驾驶执照。
2.在操作叉车前,驾驶员应检查叉车的整体状况和各项功能是否正常,如制动器、灯光和角度指示器等。
3.驾驶员应注意车辆的操控,保持平稳的行驶和操作,避免急加速、急刹车和转弯造成意外。
尽量避免突然改变叉车的运动方向和速度。
4.操作叉车时,驾驶员应时刻保持警觉,注意观察周围环境,注意行人和其他车辆的存在,并保持安全间距。
遇到紧急情况时,应立即停车并采取适当措施避免事故发生。
5.驾驶员应遵守各项交通规则,包括限速、禁止超车和禁止酒后驾驶等。
不得携带未经包装或不稳固的货物运输,以免对安全造成影响。
6.叉车的货物搬运高度应根据实际情况进行合理调整,不得超过叉头最高标志,以确保安全。
三、叉车的维护和保养1.定期进行叉车的保养和检查,包括油液更换、电池维护和清洁等。
确保叉车的各项功能正常运行。
2.定期检查叉车的轮胎和制动器,确保轮胎无磨损和制动灵敏。
如有发现异常,应及时更换或维修。
3.在使用叉车过程中,注意保持叉车的平衡,避免悬挂超高或超宽的货物,以免影响行驶稳定性。
4.消防装置必须定期检查并保持灵敏度,以应对突发火灾事故。
安全杆也应保持完整和正常工作状态,以提醒行人和其他车辆注意。
AC2说明书
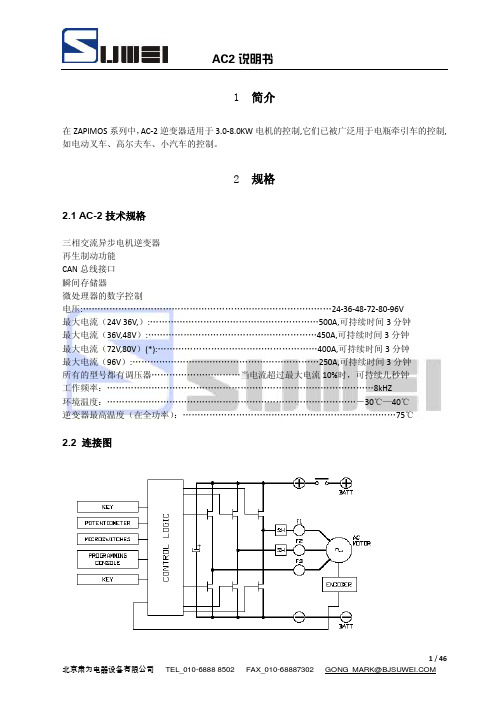
1 简介在ZAPIMOS系列中,AC-2逆变器适用于3.0-8.0KW电机的控制,它们已被广泛用于电瓶牵引车的控制,如电动叉车、高尔夫车、小汽车的控制。
2 规格2.1 AC-2技术规格三相交流异步电机逆变器再生制动功能CAN总线接口瞬间存储器微处理器的数字控制电压:…………………………………………………………………………24-36-48-72-80-96V最大电流(24V 36V,):…………………………………………………500A,可持续时间3分钟最大电流(36V,48V):…………………………………………………450A,可持续时间3分钟最大电流(72V,80V)(*):………………………………………………400A,可持续时间3分钟最大电流(96V):………………………………………………………250A,可持续时间3分钟所有的型号都有调压器…………………………当电流超过最大电流10%时,可持续几秒钟工作频率:………………………………………………………………………………8kHZ环境温度:…………………………………………………………………………-30℃—40℃逆变器最高温度(在全功率):………………………………………………………………75℃2.2 连接图3 输入装置的说明3.1 微动开关-微动开关接触电阻必需小于0.1欧姆;漏电电流必需小于100μA-在满负载的情况下,电锁开关触点之间的电压降幅要低于0.1V-当功能请求(例如运行请求)有效时,微动开关就向微处理器传送电压信号3.2 加速单元加速单元可以由一个电位器或者一个霍尔电路组成。
它由3线配置,电位器电源通过CNE#2接入。
电位器输出信号接入CPOT(CNE#),信号范围为0—10V。
电位器负端接入CNE#3.电位器的阻值范围应为0.5——10Ω负载范围一般是1.5-30mA,超出了这个范围就会出现故障。
电位器信号自动获得功能可使用手持单元实现,有用信号的最小和最大水平的调节可在两个方向上进行。
Crown ST SX 叉车操作手册说明书

Manual del OperadorEl presente manual del operariocontiene información sobretodos los modelos de las seriesST/SX y también sobre algunosaccesorios y funcioneso p c i o n a l e s.A l g u n a silustraciones y párrafos puedenno ser aplicables a sumontacargas.Usted es el componente principal.New Bremen, Ohio 45869 USA © 2005 PF14318-03 Rev. 12/06 Printed in U.S.A.Índice5 ÍndiceAdvertenciaUsted debe estar cualificado Tome precauciones Índice¿Qué contiene para usted?Su montacargas con conductor acompañante Partes del montacargas Capacidad y centro de la carga Placa de capacidadesConexión y desconexión de corriente Frenado y anulación del freno Elevación y descenso Dirección y desplazamiento Desplazamiento y freno por inversión de la marchaComprobaciones diarias de seguridad Sea un operario seguro Mantenimiento de la batería Etiquetas de advertencia12356791113151617181921232730LOCALIZADORES RÁPIDOSAdemás de la página “Índice” usted puede usar los encabezamientos de las páginas para localizar las materias.Algunas páginas tienen un dibujo del montacargas en una esquinamostrando los elementos o funciones tratados en esta página.“CONOZCA LOS PELIGROS”Busque y lea estas frases especiales.Encontrará información relativa a riesgos para su seguridad y sobre cómo evitarlos.DIBUJOS DE CÓMO HACERLOEn muchas páginas encontrará dibujos y textos que la ayudarán a comprender cómo usar su montacargas de forma segura y productiva.¿QUÉ CONTIENE PARA USTED?Como mejor conozca su montacargas y sepa como utilizarlo, un mejor operario y más seguro será usted.He aquí algunas guías para usar este manual.Su montacargas con conductor acompañanteMONTACARGAS CON CONDUCTOR ACOMPAÑANTE Su montacargas con conductor acompañante sirve para elevar, desplazar y apilar cargas.Está diseñado para recorrer distancias cortas y trabajar en zonas con poco espacio.SU MONTACARGAS NO ES UN AUTOMOVILCargado puede pesar más que 2 automóviles.•No gira de igual forma.•No frena de igual forma.•Ni acelera de igual manera.CÓMO UTILIZAR SU MONTACARGASTenedores delanteAl desplazarse con los tenedores delante,sujete el timón de control con las dos manos.Al cambiar el sentido de la marcha, tenga cuidado con los pies.Unidad motriz delanteAl desplazarse con la unidad motriz delante,manténgase a un lado del montacargas y ligeramente por delante de la unidad motriz.Para operar el timón de control, utilice la mano más cercana al montacargas.Tenga cuidado con los pies.No se interponga en el camino del montacargas.7 Su montacargas con conductor acompañanteSu montacargas con conductor acompañante 8FABRICADO SEGÚN NORMATIVAS Su montacargas ha sidodiseñado y construido siguiendo normas y pautas actualizadas de la industria y gubernamentales.Para más información, véanse las siguientes:•Instituto Americano sobre la Normativa Nacional (ANSI/ITSDF – American National Standards Institute) B56.1•Ley sobre la Salud y la Seguridad Ocupacional(OSHA – Occupational Safety and Health Act) §1910.178, Rev. 1999•Gabinete de aseguradores (UL– Underwriters Laboratory)583•Asociación Nacional contra la Prevención de Incendios (NFPA – National FirePrevention Association) 505Mano en el timónthe controlCamine a su ladoPies alejados del montacargasPartes del montacargas9 Partes del montacargas Botón de la bocina (escon. en la ilustr.)Interruptor de vel. de marcha rápidaBotones oscilantes de marcha adelante/atrásBotón de descenso (dos velocidades)Botón de inversión de la marchaBotón de elevaciónBotones oscilantes de marcha adelante/atrásBotón de la bocina (escondido en la ilustración)DesconectorBrazo del timónBateríaUnidad motrizTenedorLlave de contactoTimón de controlMástilRuedas de cargaPartes del montacargas 10Placa de capacidadesINFORMACIÓN DE LA PLACA DE CAPACIDADESLa placa de capacidades está en el travesaño cruzado del mástil. Contiene:•El número de serie del montacargas•Información sobre capacidad (peso, centro de la carga y altura de elevación)•Peso del montacargas con batería (sin incluir la carga)•Información de los accesorios (si los hay)LECTURA DE LA PLACA DE CAPACIDADESOTRAS ALTURAS DE ELEVACIÓN Y CENTROS DE LA CARGAContacte con Crown para obtener detalles sobre alturas de elevación y centros de la carga no mostrados en su placa de capacidades.Nota: La ANSI/ITSDF B56.1 exige que todos los datos sean dados primero en unidades métricas y después en unidades USA.Conexión y desconexión de corriente15 Conexión y desconexión de corriente Frenado y anulación del frenoLLAVE DE CONTACTOPara encender el montacargas coloque el timón en posición vertical y gire la llave a ON (punto verde).Para apagarlo gire la llave a OFF (punto rojo).Desconecte siempre la llave cuando abandone el montacargas.DESCONECTORTire del asidero del conector de la batería para desconectarla y cortar la corriente.Siempre que el montacargas no funcione correctamente,desconecte la batería. La llave de contacto no corta toda la alimentación de corriente del montacargas.MEDIDOR DE CARGA DE LA BATERÍALas luces verdes y amarillas indican la carga restante en la batería. Una luz roja parpadeante le avisará cuando el nivel de carga sea bajo.Dos luces rojas parpadeantes significan que es necesario cambiar o recargar la batería. También significan que no podrán elevarse los tenedores.Las baterías de mínimo mantenimiento están diseñadas para poder descargarse por completo. Sin embargo,también pueden cargarse antes de agotarse bajo ciertas circunstancias (“carga conveniente”).• El indicador del nivel de carga de la batería debe señalar como mínimo un 30% y 60% de descarga.• Las baterías deben cargarse durante 30 minutos como mínimo, y deben dejarse enfriar durante el mismo tiempo.• Las baterías deben cargarse al máximo una vez por semana como mínimo.Para más información, véase el manual de servicio.Nota: Durante la hora posterior a una “cargaconveniente”, el indicador del nivel de carga de la batería puede leer un nivel equivocado.17 Elevación y descensoELEVACIÓNMantenga apretado el botón de elevación y suéltelocuando los tenedores alcancen la altura deseada.DESCENSOPara descender rápido, apriete el botón de descensoal máximo.Para descender más lentamente, apriételo solo enparte de su recorrido.Cuando los tenedores alcancen la altura deseadasuelte el botón.Dirección y desplazamientoDIRECCIÓNLa dirección del montacargas se controla moviendo el timón de controlde un lado a otro.Por ejemplo: La siguiente imagen muestra las direccionesde giro del montacargas al mover el timón de control a una posiciónDESPLAZAMIENTOMueva uno de los botones oscilantes de marchaadelante/atrás en la dirección en que quiera desplazarse.Cuanto más separe el botón de la posición neutral, más rápido irá el montacargas.BOCINAPara tocar la bocina, apriete el interruptor que hay debajo de las manguetas. Utilícela para avisar a los peatones y a otros conductores.Utilícela cuando llegue a una intersección o a un cruce.Comprobaciones diarias de seguridad21 Comprobaciones diarias de seguridad COMPRUEBE EL MONTACARGAS ANTES DE EMPEZAR A TRABAJAR Debe cerciorarse de que el montacargas es seguro para ser utilizado.1.Circule alrededor del montacargas y compruebe lo siguiente.•Compruebe que la batería está cargada, el nivel de agua está bien y los tapones de ventilación están en su posición (si no utiliza baterías selladas de mínimo mantenimiento). No utilice una llama abierta para revisar la batería.•Asegúrese de que todas las ruedas están en condiciones correctas.•Compruebe que ambos tenedores están seguros y sin doblar, y que no están agrietados ni muy desgastados.•Compruebe si existen deterioros en las cadenas de elevación.•Compruebe que la rejilla de apoyo está bien sujeta en su lugar (si está incluida en el equipamiento del montacargas).•Mire bajo el montacargas por si existen huellas de fugas de líquidos.•Pruebe la bocina.•Compruebe que funciona el desconector.•Compruebe el funcionamiento suave de todos los controles.Comprobaciones diarias de seguridad 222. Haga una prueba de conducción en una zona no congestionada.•Compruebe todas las funciones hidráulicas.•Revise la dirección.•Conduzca lentamente el montacargas en ambas direcciones.•Conduzca a plena velocidad en ambas direcciones, adelante y atrás.•Compruebe las distancias de frenado marcha adelante y atrás. El tamaño de la carga y las condiciones del suelo pueden afectar a estas distancias.•Determine la distancia que transcurre hasta detenerse antes de empezar a trabajar. Si la distancia de frenado es demasiado grande para detenerse de forma segura,no utilice el montacargas.Si algo no parece estar correcto o no funciona bien, no utilice el montacargas. Informe del problema a su supervisor.Usted puede obtener listas de comprobación de su distribuidor Crown (referencia OF-3772). Usando apropiadamente estas listas, puede alertarse al personal de servicio de la necesidad de realizar reparaciones.23 Sea un operario seguro•Conozca las capacidades de su montacargas.Cerciórese de que usa las unidades de medidacorrectas. No está permitido el uso de algunosmontacargas en zonas donde exista algún riesgo deincendio. Asegúrese de que su montacargas disponedel tipo de protección de incendio para esa zona.•Asegúrese de que sus manos y calzado están limpiosy secos y de que su ropa es adecuada para el trabajo.ASEGÚRESE DE QUE EL MONTACARGAS ESTÉ LISTO•Inspeccione su montacargas antes de usarlo (véansepáginas 21 y 22). Si no funciona correctamente o algoestá roto o deteriorado, informe del problema a susupervisor. No use el montacargas.•En una zona abierta, compruebe los frenos. Haga lacomprobación primero a baja velocidad y despuésmás rápido. Determine la distancia de frenado antesde empezar a trabajar.principal.Sea un operario seguro 24por una zona donde exista riesgo de caída de objetos.•No se suba nunca en el montacargas.Continúa en la página siguiente...Sea un operario segurocontinuación25 Sea un operario seguro continuación CUANDO DEJE SU MONTACARGAS•Baje los tenedores hasta el suelo y desconecte el montacargas.•Intente no aparcar en rampas. Pero si no tiene otraopción, calce las ruedas del montacargas.•••••tenedores.••••••a otro.Sea un operario seguro continuación 26•Desacelere y no gire nunca al pasar por una rampa o pendiente.Mantenimiento de la bateríaMantenimiento de la bateríaEtiquetas de advertenciacontinuación。
叉车操作说明
叉车操作说明叉车操作说明1、概述本文档旨在提供叉车操作的详细说明,并确保操作人员能够安全、高效地操作叉车。
请在使用叉车之前认真阅读本文档,并确保遵守所有操作指导。
2、叉车基础知识2.1 叉车分类叉车按燃料类型可分为电动叉车、液压叉车和燃气叉车等。
2.2 叉车零部件了解叉车各个零部件的名称和功能,包括驾驶室、底盘、车灯、油箱、叉臂等。
2.3 叉车安全规范在操作叉车之前,必须了解叉车的安全规范,包括穿戴安全帽、佩戴安全带、正确使用紧急制动器等。
3、叉车操作步骤3.1 叉车检查在操作叉车之前,需要进行叉车的日常检查,确保机械部件完好、油液充足、制动器灵活等。
3.2 上车准备佩戴合适的安全帽和安全带,在确保叉车平稳的位置上,打开驾驶室门,调整座椅和镜子,并确认所有控制杆的位置正确。
4、叉车操作4.1 准备工作根据工作需要,调整叉臂的位置和角度,确保叉臂符合货物的尺寸。
4.2 加载物品将货物置于叉臂之间,确保货物稳固且叉臂完全托住货物。
4.3 行驶操作在开始行驶之前,确保车道畅通无障碍物并发出警示信号。
慢慢加速,小心地驾驶叉车,避免急转弯或悬崖边行驶。
5、叉车维护与保养5.1 日常维护定期检查叉车的液压系统、制动系统、轮胎磨损情况等。
及时更换磨损的零部件,并保持机械部件的清洁。
5.2 定期保养按照制造商的规定,定期进行叉车的保养,并及时更换润滑油和过滤器。
6、附件本文档所涉及的附件包括叉车操作手册、维护记录表、故障排除指南等。
详细附件请参考随附材料。
7、法律名词及注释7.1 叉车操作许可证:指由相关机构颁发的合法许可证明,证明操作人员具备操作叉车的资格。
7.2 员工安全培训:指为叉车操作员进行的安全培训课程,包括叉车基本知识、操作规范等内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 特性
1.1 特点
1.萨牌MDI多功能数字仪表是一个显示器,它适用于所有装有ZAPI高频电控器的各种形式的电动车辆。
2.萨牌MDI多功能数字仪表的信号取自斩波器,而不是电瓶,这样不同电压等级的车辆也可用同一仪表。
3.电瓶的放电状态由微处理器进行一定的换算模拟获得。
该换算考虑了制动及起动等大电流工况对电瓶的影响。
4.用萨牌MDI数字式手持单元,可以选择100种不同放电曲线。
5.萨牌MDI多功能数字仪表是一个以微处理器为基础的系统。
对电瓶放电状态测量是高精度的,具有很高的可靠性和灵敏度。
同时萨牌MDI多功能数字仪表还可以显示工作小时。
6.萨牌MDI多功能数字仪表有三个内部功能。
●显示放电状态。
●工作小时。
●显示控制系统故障。
7.萨牌MDI多功能数字仪表不直接连到电瓶,她仅与斩波器相连。
与传统显示仪表相比,萨牌MDI多功能数字仪表无需复杂接线,也节省了安装时间。
1.2 显示功能说明
1.2.a 发光二极管显示功能
萨牌MDI多功能数字仪表用发光二极管显示电瓶放电状态。
萨牌MDI多功能数字仪表有五个发光二极管,一红四绿,表示电瓶的放电状态。
充足电时,四个绿色发光二极管全亮。
随着电瓶不断放电,四个绿灯随电瓶剩余电量的减少逐步并按一定顺序熄灭,直至电瓶放完电,红灯开始闪烁,表示电瓶已开始过放电,斩波器进入低电压保护状态。
1.2.b 液晶显示功能
小时计:
在萨牌MDI多功能数字仪表中部装有液晶显示器,它可以用来显示
1.工作小时
2.系统故障,萨牌MDI多功能数字仪表显示故障状态时是以相应的代码表示,故障发生时,红色发光二极管将开始闪烁,以引起注意。
3.软件版本:电锁刚闭合时,萨牌MDI多功能数字仪表显示EPROM中的软件版本,即EP××,同时出现扳手图案。
4.其它信息,萨牌MDI多功能数字仪表上有三种图案,分别告知司机下列信息:
乌龟图案:
表示车辆处在“软”方式工作状态,在这种状态下,最大速度和加速度都被减小了。
扳手图案:
表示车辆规定的维护时间已到或表示出现故障或误操作,在出现故障和误操
作时还会显示一个代码,根据这个代码可以在控制器说明书有关故障诊断的章节中找出可能的故障原因,从而很快找到解决办法。
砂漏图案:
这个图案闪烁表示小时计正在工作。
2 设置和调整
用ZAPI数字式手持单元能实现下述设置和调整:
1.电瓶电量模拟换算
2.设置维护提示时间
3.工作时间记录
2.1 电瓶电量模拟换算
任何电瓶都有一条固有的放电曲线,即在一定的电流下,电瓶的剩余电量与电瓶两端的电压呈一定的关系。
萨牌MDI多功能仪表就利用了这一原理,模拟出一条电流在15%到27%控制器最大电流时的电瓶放电曲线。
这条放电曲线的始端和末端均可用手持单元来调整。
即:
●ADJUSTMENT #1 (调节#1):进入这个菜单可调整电瓶电量从100%到90%
时的电压临界值。
参数设置为0时,表示在同样的剩余电量下,电压临界值降低3.21%,参数设置为9时:表示在同样的剩余电量下,电压临界值增加电压范围2.75%。
参数为5,视同缺损,不进行修正。
●ADJUSTMENT #2 (调节#2):进入这个菜单可调整电瓶电量从20%到10%
时的电压临界值。
参数设置为0时,表示在同样的剩余电量下,电压临界值降低3.21%,参数设置为9时:表示在同样的剩余电量下,电压临界值增加电压范围2.75%。
参数为5,视同缺损,不进行修正。
参数为0电瓶使用时间长。
●电瓶电量从80%到30%时电瓶剩余电量与电压临界值的关系按线性变化模
拟。
下表表示缺损状态或参数为5时电瓶剩余电量与电压的关系:
●—旦控制器接通,电瓶容量显示就开始下降。
刚充足电的电瓶,电锁接通时显示100%电瓶容量。
除非在这种情况下;电瓶容量超过70%停止工作。
这时显示百分值(例如80%)持续的时间要比一般情况要长,这是因为实际电瓶容量高于显示电压值(80%)。
要等实际电瓶容量降到显示的百分数,电瓶容量显示才开始下降。
建议电瓶电量降到比较低时,如10%,20%或30%时就去充电,这样将有助于延长电瓶的寿命。
2.2 用ZAPI手持单元可对电瓶放电模拟曲线进行调正。
1)打开电锁,ZAPI手持单元显示出现如图信息
2)按ENTER进入主菜单
3)显示参数调整菜单
4)按ROLL UP键直到显示了“故障”ALARM菜单
5)按“ENTER”出进入故障ALARM菜单
6)显示斩波器中存储曾经发生过的故障或误操作
7)同时按下ROLL UP和ROLLDOWN键找到ZAPI保护菜单ZAPI PROTECT MENU
8)手持单元显示菜单标题,同时显示第一个子菜单
9)按ROLL UP 或ROLL DOWN,找到硬件设置HARDWARE SETTING菜单10)硬件设置标题HARDWARE SETTING出现
11)按ENTER进入
12)这时按UP或DOWN,进行调整操作
13)出现ADJUSTNENT #1时,同时出现预先设置或缺损的水平值。
14)按ROLL UP或ROLL DOWN修正水平值
15)显示新值
16)按OUT按钮退出菜单
17)最后按ENTER确认修正。
再按5)到12)步进行ADJUSTMENT #2的调整。
重要提示:
在对电瓶调整之前,建议用一台核定好的数字万用表测量一下电瓶电压,检查手持“测试”菜单中显示的电瓶电压值和电瓶实际值是否相同,若两个电压值不同要用手持单元对斩波器的测量电压进行校准,即进入“电压调整”菜单ADJUST BATTERY 进行调整,详细资料参阅相应斩波器的使用手册。
2.3 维护服务
萨牌MDI多功能数字仪表显示AL99,对应手持显示“CHECK UP NEEDED”,表示车辆到了预设的维护时间了。
什么时候显示AL99,或是否需要维护提示,可以用手持单元进行设置,即用手持单元进入“CHECK UP TYPE”菜单,按下表的定义进行设定。
在“CHECK UP TYPE”菜单中还可以设定提示方式,即若车辆到了应该维护的时间没有维护,
●“CHECK UP DONE”的设定若缺损,结果与设置成NONE一样,因为在
这种设置中不显示AL99,车辆不会降低速度行驶丧失,也不会停止工作。
为了清除AL99,要把“CHECK UP DONE”设置或ON,即进入手持单
元的硬件菜单(HARDWARE SETTING)中设置。
设置结束后进入退出
所有菜单。
断开电锁,10秒后再接通,AL99就被清除掉了。
●机器工作一定小时以后,如需激活维护提示功能,要把“CHECK UP
DONE”设置成ON,让小时计复位。
设置结束后进入退出所有菜单。
断
开电锁,10秒后再接通,维护提示就被启动。
2.4. 小时计存贮
萨牌MDI多功能数字仪表有一个自己的存储器,用来保存小时计的数据,若斩波器更换了,小时计的数据将转到新的斩波器中,这样车辆的维护资料就不会因更换备件而丢失。
这要求更换斩波器时按下述步骤进行操作
1.断开电锁开关,将萨牌MDI多功能数字仪表插头从斩波器中拔掉,插入手持单元
2.闭合电锁,进入HARDWARE SETTING 菜单,将“LOAD HM FROM MDI”
功能设置为ON。
有些版本此功能从“AUX FUNCTION1”菜单中设定。
3.断开电锁,取下手持单元,接上多功能表,合上电锁,新的控制器将立刻接收和保存原控制器中的小时计值。
必须注意:
对于“LOAD HM FROM MDI”设置缺损将被默认为设置成OFF,这种情况下这个功能未被激活,存储的小时值将被丢失。
为避免司机忘记设置参数“LOAD HM FROM MDI”,MDI多功能数字表显示“AL98”一分钟,这期间车辆停止运行,提醒司机小时计数据将要丢失,一分钟后如司机还是不去设置“LOAD HM MDI”,MDI的小时计数据将改写成新控制器的小时计数据,若控制器是新的,小时值就为0。
3 故障显示
萨牌MDI多功能数字表用相应的代码显示控制器的故障。
故障发生时,红色发光二极管闪烁,提示司机注意,并出现提示扳手图案
在MDI上显示故障译码
用MDI给出的显示,再照下表,可从相应的斩波器使用手册中找到相应的故障原因分析,从而很快解决问题。
如果不能解决,则司机能可将故障代码告诉维修中心,维修中心可依据这个故障代码给司机提供适当的帮助,或带上适当的。