EPSON机械手选件TP2中文手册
epson机械手程序讲解
epson机械手程序讲解Epson机械手是一种工业机器人,通常用于自动化生产线上的装配、搬运和加工等任务。
它们可以根据预先设定的程序执行各种复杂的动作,从而提高生产效率和质量。
下面我将从不同角度讲解Epson机械手的程序。
首先,Epson机械手的程序可以通过专门的机器人编程软件进行编写和编辑。
这些软件通常提供了图形化的用户界面,使操作人员可以直观地创建机器人动作序列,设置运动路径、速度、加减速度和姿态等参数。
此外,一些软件还支持基于模拟的程序验证,以确保程序的准确性和安全性。
其次,Epson机械手的程序通常包括了各种运动指令、逻辑控制和传感器反馈等元素。
例如,可以通过编程指定机械手的起始位置、目标位置和中间路径,还可以添加逻辑判断,使机械手根据不同的情况执行不同的动作,同时还可以集成传感器反馈,实现对工件位置、质量等信息的实时监测和响应。
此外,Epson机械手的程序还可以与其他设备进行接口和通讯,实现自动化生产线的协调作业。
通过编写程序,可以实现机械手与输送带、加工设备、检测设备等的联动操作,从而实现整个生产过程的自动化控制和优化。
最后,Epson机械手的程序还需要考虑安全性、稳定性和可维护性等方面。
在编写程序时,需要充分考虑机械手在工作过程中的安全保护措施,避免发生意外伤害。
同时,还需要考虑程序的稳定性和可维护性,确保程序的稳定运行和便于日常维护和升级。
总的来说,Epson机械手的程序编写涉及到多个方面,包括机器人编程软件的使用、运动控制、逻辑控制、传感器接口、设备通讯、安全性和稳定性等。
通过合理的程序设计和编写,可以充分发挥Epson机械手在自动化生产中的作用,提高生产效率和质量。
EPSON机械手选件TP2中文手册

iv
RC700/RC90 选件 TP2 Rev.2
东南亚 印度
Epson Singapore Pte Ltd. Factory Automation System 1 HarbourFrontPlace, #03-02 HarbourFront Tower one, Singapore 098633 TEL : +65-(0)-6586-5696 FAX : +65-(0)-6271-3182 EPSON Korea Co, Ltd. Marketing Team (Robot Business) 11F Milim Tower, 825-22 Yeoksam-dong, Gangnam-gu, Seoul, 135-934 Korea TEL : +82-(0)-2-3420-6692 FAX : +82-(0)-2-558-4271 EPSON SALES JAPAN CORPORATION
前言
感谢您购买本公司的机器人系统。 本手册记载了正确使用示教器所需的事项。 使用系统之前,请阅读本手册与相关手册,正确地进行使用。 阅读之后,请妥善保管,以便随时取阅。
保修
本机器人系统及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认 性能满足本公司标准之后出厂交付的。 在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。 (有关保 修期方面的信息,请咨询当地的销售办事处。 ) 但在以下情况下,将对客户收取修理费用(即使发生在保修期内): 1. 因不同于使用说明书内容的错误使用以及使用不当而导致的故障与损伤。 2. 客户擅自改造或拆卸造成的故障。 3. 因调整不当/擅自修理而导致的损坏。 4. 因地震、洪水等自然灾害导致的损坏。 警告、小心、使用: 1. 如果机器人系统相关设备的使用超出本手册所述的使用条件及产品规格,将导致 保修无效。 2. 本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至 是人身伤害或死亡均不承担任何责任,敬请谅解。 3. 本公司不可能完全预见危险与故障发生的所有状况,此可预见性存在局限性。因 此,本手册不能警告用户所有可能的危险。
西铁城 水平多关节型机器人 LS系列 机器人手册 (中文版)说明书
机器人手册 LS 系列 Rev.8水平多关节型机器人LS系列机器人手册Rev.8Copyright 2011-2015 SEIKO EPSON CORPORATION. All rights reserved. LS Rev.8i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用机器人所需的事项。
安装该机器人系统前,请仔细阅读本手册与其他相关手册。
阅读之后,请妥善保管,以便随时取阅。
保修本机及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您的区域销售办事处。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1. 因不同于手册内容的错误使用以及使用不当而导致的损坏或故障。
2. 客户未经授权进行拆卸导致的故障。
3. 因调整不当或未经授权进行修理而导致的损坏。
4. 因地震、洪水等自然灾害导致的损坏。
警告、小心、使用:1. 如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2. 本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至是人身伤害或死亡,均不承担任何责任,敬请谅解。
3. 本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
ii LS Rev.8商标Microsoft、Windows及Windows标识为美国Microsoft Corporation在美国和∕或其它国家的注册商标或商标。
其它品牌与产品名称均为各公司的注册商标或商标。
注意事项禁止擅自复印或转载本手册的部分或全部内容。
本手册记载的内容将来可能会随时变更,恕不事先通告。
如您发现本手册的内容有误或需要改进之处,请不吝斧正。
垂询方式有关机器人的修理∕检查∕调整等事项,请与服务中心联系。
未记载服务中心时,请与当地销售商联系。
爱普生培训资料:EPSON机械手软件操作指南
四、RC+5.4.3软件操作 (5)在“点数据”页面单击“保存”按钮,完成示教点。
四、RC+5.4.3软件操作
五、 马达重置及伺服OFF
工具 →机器人管理器→控制面板或单击工轴刹车释放后要按住 伺服指示灯旁边白色按
钮才能手动移动Z轴
运行功率设置
四、RC+5.4.3软件操作
1、 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
EPSON机械手软件操作指南
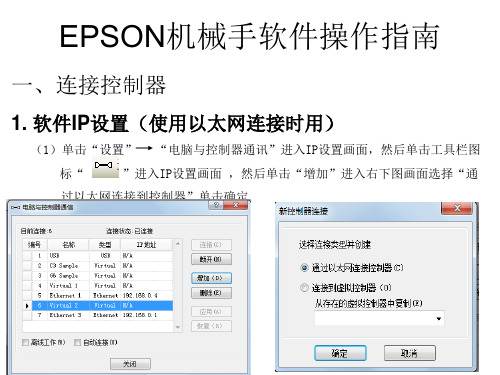
一、连接控制器
1. 软件IP设置(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,然后单击工具栏图
标“
”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
四、RC+5.4.3软件操作
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示 设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在 “设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制 器的前三位相同,例如“192.168.0.10”
四、RC+5.4.3软件操作 2、选择“控制器”单击“下一个”进入如下画面
四、RC+5.4.3软件操作
3、修改程序名称(可不修改)设定存储磁盘后,单击“下一个” 进入如下画面,然后单击“导入”即可将控制器内的程序读取出 来。
EPSON ROBOT TP2 教导器使用说明
10
The End
Thank you very much!
11
5
Operation
•操作面板
6
Auto 模式
•F1:查詢異常履歷 顯7
TEACH模式:功能鍵
F1:點位資料 F2:I/O F3:運動模式 F4:解除/鎖定各軸 F5:煞車釋放 F6:ECP
•P.S.示教時需將”做動允許按鈕”壓下第一 段,若放開或壓下第二段,機器人無法做動。
TP2外型
TP2與控制器連接示意圖
TP2控制器連接頭規格
TP2標準規格
3
Specification
1. 顯示螢幕 2. 警停按鈕 3. 做動允許按鈕(ENBAL) 4. AUTO/TEACH切換開關 5. 操作面版 6. 連接器(控制器) 7. 連結電纜(5公尺)
4
Installation
1.安裝於控制器面版上TP連接埠。 2.可於控制器啟動時安裝、卸載(於Auto模式下)。 3.於TP連接埠安裝急停短路端子,則控制器可在沒有 TP2的 狀態下操作。
EPSON ROBOT TP2 使用說明
1
Outline
•TP2 (教導器)基本介紹 •1.Specification •2.Installation •3.Operation a. 操作面版 b. Auto 模式 c. TEACH模式 d. 教點流程
2
TP2 (教導器)基本介紹
• 功能:教導點位、執行指令、執行 程式(分兩種模式) • 不能做程式的編輯 • TP2搭配控制器:RC180、RC90 • TP2的控制器連接頭為D-sub頭 • 連接頭長度為5m
8
TEACH模式:教示功能鍵
Teach:教點 Save:儲存點位資料 Load:載出點位資料 Speed:切換速度(H/L) Mode:切換座標系(W/T/L/J) Dist:切換步進距離(C/L/M/S) Reset:還原初始設定 Motor:切換Motor ON/OFF Home:機器人回到起始點
手册_EPSON培训手册

12
五、SPEL+語言
4.變數的類型 變數有很多種類型,使用前先說明類型,格式為:數據類型變量名。例如: Integer i,定義變量i為整型數據。另外,代入的數據和變量的類型必須一致。在下 表中列出SPEL+ 語言中使用的數據類型。
13
六、動作指令
1. 動作指令分類
使機械手臂動作的指令叫作動作指令。 可分為:PTP動作指令,CP動作指令,Curves動作指令,Joint動作指令。
17
六、動作指令
5. 速度設定指令 5.1 PTP指令的速度設定
Speed 功能用於設定PTP動作速度的百分比 格式:Speed s,[a,b] 說明:s 速度設定值;a 第三軸上升速度設定值;b 第三軸下降速度設定值。 範例:1. Speed 80 2. Speed 80,40,30
圖2
NOTE:
1、Jump不能用於6軸機械手臂,6軸機械手臂只能使用Jump3和Jump3 CP指令 2、Jump3CP指令用法與Jump3類似,不同在於Jump3CP是3個CP動作的组合 3、SCARA機械手臂Z軸上升或下降動作時,使用Jump指令可以提高運动速度
3.4 BMove 、TMove、CVMove 指令
表1
7
二、硬體概要
系统組成圖示
8
三、EPSON RC+ 用戶界面
9
四、示教
1. 微調Jog &Teach介面
打開Jog&Teach介面: Tools →Robot Manager →Jog&Teach或點選工具檔
圖標後,選擇Jog&Teach介面。如下圖示
Mode說明:
World:在當前的局部坐標系、工具坐標系、機械手臂属性、ECP坐標系上,向X、Y、Z轴的方向微調動 作。如果是SCARA型機械手臂,也可以向U方向微動。如果是垂直6軸型機械手臂,則可以向U方向(傾 斜)、V方向(仰卧)、W方向(偏轉)微動。 Local: 向定義的局部坐標系的方向微動移動。 Tool : 向工具定義的坐標系的方向微動移動。 Joint : 各機械手臂的關節單獨微調移動。不是直角坐標型的機械手臂使用Joint模式時,顯示單獨的 微調按钮。 ECP : 在用當前的外部控制點定義的坐標系上,微調動作。
epson机械手培训课件
epson机械手培训课件汇报人:2023-11-16•机械手概述•epson机械手基本操作•机械手高级操作技巧•机械手编程实例目•epson机械手调试与维护•epson机械手应用案例分析录机械手概述机械手定义机械手特点机械手定义与特点机械手起源机械手发展机械手的历史与发展机械手的应用范围工业领域01医疗领域02其他领域03epson机械手基本操作机械手编程语言简介RAPID编程语言RAPID编程语言基本结构机械手操作流程1. 打开电源,启动机械手控制系统。
2. 连接机械手与计算机,进行系统初始化。
6. 运行程序,观察机械手实际运行情况。
7. 记录数据,分析结果。
机械手操作规范1. 在进行机械手操作前,务必确保机械手及其周边环境的安全性。
2. 请勿在机械手运行时进行维护和调试。
3. 在使用机械手进行生产作业时,请严格按照操作规程执行,避免因误操作导致的事故。
基本指令1. MOVE:移动机械手到指定位置。
2. Pose:设置机械手的姿态(位置、角度)。
4. If5. GOTO1. 运动控制:可以实现直线插补、圆弧插补、旋转等运机械手高级操作技巧运动学基础介绍机械手运动学的基本原理,包括正运动学和逆运动学,以及机械手位姿的描述方法。
动力学基础介绍机械手动力学的基本原理,包括力和运动的关系,以及机械手动力学模型的建立方法。
机械手运动学与动力学基础机械手轨迹规划方法基于几何的轨迹规划介绍基于几何的机械手轨迹规划方法,如直线插补和圆弧插补等。
基于运动的轨迹规划介绍基于运动的机械手轨迹规划方法,如加速度和速度规划等。
介绍机械手速度控制的基本原理,如PID 控制器和模糊控制器等,以及实现方法。
加速度控制介绍机械手加速度控制的基本原理,如加速度限制和冲击限制等,以及实现方法。
速度控制机械手速度与加速度控制VS机械手编程实例确定搬运任务选择合适的机械手编写搬运程序程序调试与优化简单搬运程序编写编写装配程序程序调试与优化分析分拣任务根据任务特点选择适合的传感器型号。
艾尔发注塑机械手说明书

5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ii
RC700/RC90 选件 TP2 Rev.2
商标
Microsoft、 Windows和Windows标识为美国Microsoft Corporation在美国与其他国家的 注册商标或商标。其他品牌与产品名称均为各公司的注册商标或商标。
本手册中的商标符号
Microsoft® Windows® XP Operating system Microsoft® Windows® Vista Operating system Microsoft® Windows® 7 Operating system 在本手册中,Windows XP、Windows Vista 和 Windows 7 指的是上述各操作系统。 在某些情况下,Windows 一般是指 Windows XP、Windows Vista 和 Windows 7。
4. 操作模式(TEACH/AUTO)............................. 14
4.1 概述 ............................................................. 14 4.2 切换操作模式 ..................................................... 15
iv
RC700/RC90 选件 TP2 Rev.2
东南亚 印度
Epson Singapore Pte Ltd. Factory Automation System 1 HarbourFrontPlace, #03-02 HarbourFront Tower one, Singapore 098633 TEL : +65-(0)-6586-5696 FAX : +65-(0)-6271-3182 EPSON Korea Co, Ltd. Marketing Team (Robot Business) 11F Milim Tower, 825-22 Yeoksam-dong, Gangnam-gu, Seoul, 135-934 Korea TEL : +82-(0)-2-3420-6692 FAX : +82-(0)-2-558-4271 EPSON SALES JAPAN CORPORATION
台湾
欧洲
中国
EPSON Taiwan Technology & Trading Ltd. Factory Automation Division 14F, No.7, Song Ren Road, Taipei 110 Taiwan, ROC TEL : +886-(0)-2-8786-6688 FAX : +886-(0)-2-8786-6677
Factory Automation Systems Department Nishi-Shinjuku Mitsui Bldg.6-24-1 Nishishinjuku.Shinjuku-ku.Tokyo.160-8324 JAPAN TEL : +81-(0)3-5321-4161
韩国
日本
RC700/RC90 选件 TP2 Rev.2
v
阅读本手册之前
本手册将以这些符号表示下述说明。
提示
注
“注”部分描述了操作机器人系统应遵循的重要信息。 “提示”部分描述了让操作变得更容易或进行替代时的提示。
注 注
注
请勿将TP2连接至以下机器人控制器。否则可能会因针脚分配不同而导致设备故障。 RC420/RC520/SRC5**/SRC-3**/SRC-2**
5. 操作面板(按键描述)............................... 16
供应商
北美与南美 EPSON AMERICA, INC. Factory Automation/Robotics 18300 Central Avenue Carson, CA 90746 USA TEL : +1-562-290-5900 FAX : +1-562-290-5999 E-MAIL : info@ EPSON DEUTSCHLAND GmbH Factory Automation Division Otto-Hahn-Str.4 D-40670 Meerbusch Germany TEL : +49-(0)-2159-538-1391 FAX : +49-(0)-2159-538-3170 E-MAIL : s@epson.de EPSON China Co., Ltd Factory Automation Division 7F, Jinbao Building No. 89 Jinbao Street Dongcheng District, Beijing, China, 100005 TEL : +86-(0)-10-8522-1199 FAX : +86-(0)-10-8522-1120
机器人控制器 RC700/RC90 选件 示教器
TP2
Rev.2 C1M13ZP2617R
机器人控制器RC700/RC90选件
示教器
TP2
Rev.2
ii
机器人控制器 RC700/RC90 选件 示教器
TP2
Rev.2
Copyright © 2012-2013 SEIKO EPSON CORPORATION. All rights reserved. RC700/RC90 选件 TP2 Rev.2 i
3. 安装............................................... 11
3.1 安装内容 ......................................................... 11 3.2 环境条件 ......................................................... 11 3.3 操作注意事项 ..................................................... 11 3.4 连接 ............................................................. 12 3.4.1 典型的电缆连接 ...........................................12 3.4.2 与控制器的连接 ...........................................13 3.5 电源 ............................................................. 13
OK:可兼容 !!!: 可兼容
注
可使用EPSON RC+ 7.0与控制器具备的所有功能。 可连接。我们推荐使用EPSON RC+ 7.0 Ver.7.0.2或以后版本。
注
使用无标签(EPSON RC+ 5.0)的机器人控制器 RC90 或 RC180 时,请参阅 RC90 / RC180 option Teach Pendant TP2 Manual。 其功能与本手册所述内容有所不同。
服务中心
RC700/RC90 选件 TP2 Rev.2
iii
制造商
Toyoshina Plant Factory Automation Systems Dept. 6925 Toyoshina Tazawa, Azumino-shi, Nagano, 399-8285 JAPAN TEL : +81-(0)263-72-1530 FAX : +81-(0)263-72-1495
TYPE B 的 PDF 手册适用于 EPSON RC+ 7.0 Ver.7.0.2。
RC700/RC90 选件 TP2 Rev.2
vii
viii
RC700/RC90 选件 TP2 Rev.2
目录
功能与安装
1. 安全................................................ 3
vi
RC700/RC90 选件 TP2 Rev.2
控制系统配置
本选件将与以下控制器和软件组合配套使用。
TYPE A:
控制器 RC700 软件 EPSON RC+ 7.0
TYPE B:附有以下标签的机器人控制器 RC90。
标签 控制器 软件
RC90
EPSON RC+ 7.0
RC90 控制器固件 Ver.7.0.2.0 EPSON RC+ 7.0 Ver.7.0.1 以前版本 Ver.7.0.2 以后版本 !!! OK
当 RC700/RC90(EPSON RC+7.0)选件 TP2 连接至机器人控制器 RC90(EPSON RC+5.0)或 RC180 时,其操作与本手册所述内容有所不同。 在这种情况下,请参阅以下手册。 RC90 / RC180 option Teach Pendan,数据称为“点数据”。
通知
禁止擅自复印或转载本手册的部分或全部内容。 本手册记载的内容将来可能会随时变更,恕不事先通告。 若您发现本手册的内容有误或需要改进之处,请不吝斧正。
垂询方式
有关机器人的修理/检查/调整等事项,请与服务中心联系。 未记载服务中心时,请与当地销售商联系。 联系时,请事先准备好下述各项。 - 控制器型号及其序列号 - 机器人型号及其序列号 - 机器人系统中的软件名称及其版本 - 问题描述
2. 规格................................................ 8
2.1 部件名称与功能 .................................................... 8 2.2 标准规格 .......................................................... 9 2.3 外形尺寸 ......................................................... 10