CFD网格及其生成方法概述
CFD气流模拟仿真的基本步骤及网格的作用
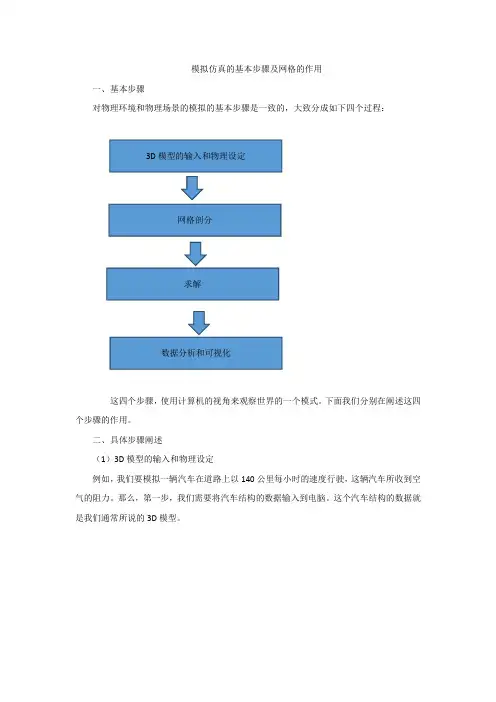
模拟仿真的基本步骤及网格的作用一、基本步骤对物理环境和物理场景的模拟的基本步骤是一致的,大致分成如下四个过程:3D模型的输入和物理设定网格剖分求解数据分析和可视化这四个步骤,使用计算机的视角来观察世界的一个模式。
下面我们分别在阐述这四个步骤的作用。
二、具体步骤阐述(1)3D模型的输入和物理设定例如,我们要模拟一辆汽车在道路上以140公里每小时的速度行驶,这辆汽车所收到空气的阻力。
那么,第一步,我们需要将汽车结构的数据输入到电脑。
这个汽车结构的数据就是我们通常所说的3D模型。
同时,我们还需要给这个汽车一个形式的空间。
通常,由于模拟数据是和风洞试验对比的,我们仍然称这个空间为风洞,只是为了区分,我们称之为数值风洞。
因为它是虚拟的。
风洞的形状通常会是一个方形的。
这样就准备好了我们需要的在结构上的数据。
但是如何和实际的汽车行驶对应起来呢?我们还需要告诉计算机哪个模型是汽车,哪个模型是风洞,他们对应现实中的什么物理特性?例如汽车的轮子是旋转的,汽车的表面会阻碍风的流动等等。
这个步骤称为物理设定。
(2)网格剖分刚才我们已经在计算机里输入了3D模型,并且做了物理属性的设定。
实际上在风洞内包含了风洞的墙,汽车的表面,还有空气。
这些物质的运动是我们需要模拟的。
为了模拟出这些物质的运动,我们需要把这个空间拆分成数千万的小多面体。
每个多面体对应这些物质的一部分,然后进行计算。
将这个空间拆分成数千万小多面体并与物质对应起来的过程,称为网格剖分。
而剖分出来的表征空间和物质的千万个小多面体整体称为网格。
(3)求解有了3D模型,有了物理特性,有了网格剖分,我们就可以建立数学模型实际上是一个方程,进行求解。
这个过程,我们也称为求解。
求解之后,我们就可以获得这个方程的一个解。
这个解,我们可以理解成一个通俗的说法,就是答案。
因为我们希望通过计算的计算来得到汽车在公路上行驶的时候,它的气流分布的答案。
(4)数据分析与可视化经过求解之后,我们获得的答案是一堆数据。
网格生成及修正技巧
网格生成及修正技巧1引言网格是CFD 模型的几何表达形式,也是模拟与分析的载体。
网格质量对CFD 计算精度和计算效率有着重要的影响。
对于复杂的CFD 问题,网格的生成极为耗时,并且极易出错,生成网格所需的时间常常大于实际CFD 计算的时间。
因此,有必要对网格生成以及修正方法进行足够的研究。
考虑到目前的CFD 计算多是通过专用的网格生成软件来划分所需要的网格,因此,本文就如何利用专用前处理软件GAMBIT 来介绍网格的生成和修正技巧。
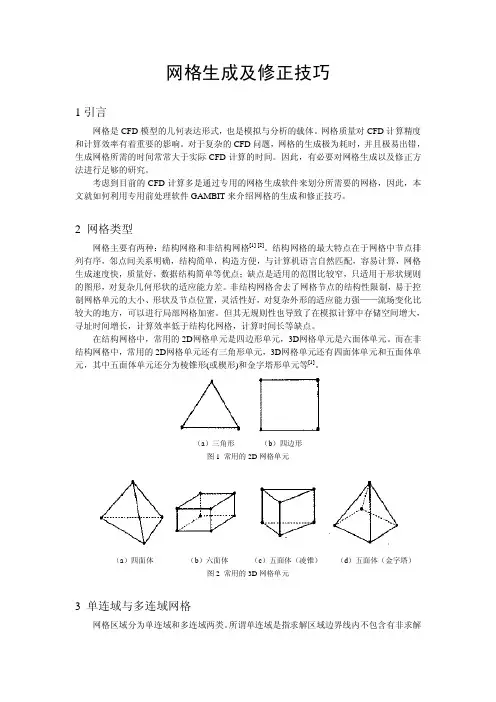
2 网格类型网格主要有两种:结构网格和非结构网格[1] [2]在结构网格中,常用的2D 网格单元是四边形单元,3D 网格单元是六面体单元。
而在非结构网格中,常用的2D 网格单元还有三角形单元,3D 网格单元还有四面体单元和五面体单元,其中五面体单元还分为棱锥形(或楔形)和金字塔形单元等。
结构网格的最大特点在于网格中节点排列有序,邻点间关系明确,结构简单,构造方便,与计算机语言自然匹配,容易计算,网格生成速度快,质量好,数据结构简单等优点;缺点是适用的范围比较窄,只适用于形状规则的图形,对复杂几何形状的适应能力差。
非结构网格舍去了网格节点的结构性限制,易于控制网格单元的大小、形状及节点位置,灵活性好,对复杂外形的适应能力强——流场变化比较大的地方,可以进行局部网格加密。
但其无规则性也导致了在模拟计算中存储空间增大,寻址时间增长,计算效率低于结构化网格,计算时间长等缺点。
[1]。
(a )三角形 (b )四边形图1 常用的2D网格单元(a )四面体 (b )六面体 (c )五面体(凌锥) (d )五面体(金字塔)图2 常用的3D 网格单元3 单连域与多连域网格网格区域分为单连域和多连域两类。
所谓单连域是指求解区域边界线内不包含有非求解区域的情形。
如果在求解区域内包含求解区域,则称该求解区域为多连域。
所有的绕流流动,都属于典型的多连域问题,其网格主要有O 型和C 型两种[1]。
cfd仿真过程的主要步骤
cfd仿真过程的主要步骤CFD(Computational Fluid Dynamics)仿真是一种通过计算流体的数值模拟方法来研究流体力学问题的技术。
它能够精确地预测流体的物理行为,并在实际应用中发挥重要作用。
本文将介绍CFD仿真过程的主要步骤,以帮助读者了解该技术的基本原理和应用。
第一步:建立几何模型CFD仿真的第一步是建立几何模型。
在进行仿真前,需要收集实际问题的相关数据,并据此创建一个三维几何模型。
这可以通过计算机辅助设计(CAD)软件或其他三维建模软件完成。
建立几何模型时需要考虑问题的尺寸、形状和边界条件等因素。
第二步:离散网格生成离散化是CFD仿真的关键步骤之一。
在此步骤中,需要将连续流体域分割成离散网格。
这些网格通常是由简单的几何形状(如立方体或六面体)构成的。
离散网格的精度和分辨率将直接影响到仿真结果的准确性。
第三步:物理建模与边界条件设定在进行CFD仿真之前,需要选择适当的物理模型和设定边界条件。
物理模型可以是基于连续介质力学的Navier-Stokes方程,也可以是基于稀薄气体动力学的Boltzmann方程等。
边界条件包括入口和出口条件、壁面条件、对称条件等。
物理建模和边界条件的选择将决定仿真的结果和准确性。
第四步:数值求解在CFD仿真中,需要使用数值方法对所选的物理模型进行求解。
常用的数值方法包括有限差分法、有限元法和有限体积法等。
这些方法将选择的物理模型转化为离散形式的数值模型,并使用迭代算法来求解流体问题。
第五步:边界条件调整和预处理在进行数值求解之前,通常需要对网格进行预处理,以提高计算效率和准确性。
此外,边界条件和物理模型也需要进行调整和验证,以确保仿真结果的合理性。
第六步:数值模拟和结果分析在对CFD仿真进行数值求解之后,可以开始进行数值模拟和结果分析。
通过对仿真结果的可视化和定量分析,可以了解流体的流动特性、压力分布、速度场等信息。
这对于解决实际问题、优化设计和改进工艺具有重要意义。
CFD网格的通俗介绍
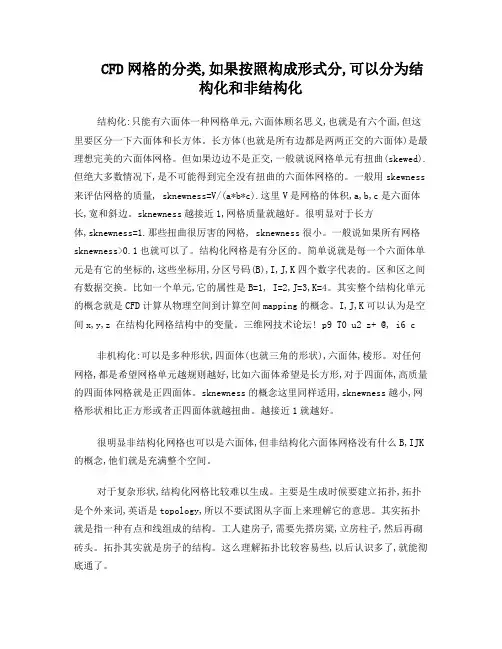
CFD网格的分类,如果按照构成形式分,可以分为结构化和非结构化结构化:只能有六面体一种网格单元,六面体顾名思义,也就是有六个面,但这里要区分一下六面体和长方体。
长方体(也就是所有边都是两两正交的六面体)是最理想完美的六面体网格。
但如果边边不是正交,一般就说网格单元有扭曲(skewed).但绝大多数情况下,是不可能得到完全没有扭曲的六面体网格的。
一般用skewness 来评估网格的质量, sknewness=V/(a*b*c).这里V是网格的体积,a,b,c是六面体长,宽和斜边。
sknewness越接近1,网格质量就越好。
很明显对于长方体,sknewness=1.那些扭曲很厉害的网格, sknewness很小。
一般说如果所有网格sknewness>0.1也就可以了。
结构化网格是有分区的。
简单说就是每一个六面体单元是有它的坐标的,这些坐标用,分区号码(B),I,J,K四个数字代表的。
区和区之间有数据交换。
比如一个单元,它的属性是B=1, I=2,J=3,K=4。
其实整个结构化单元的概念就是CFD计算从物理空间到计算空间mapping的概念。
I,J,K可以认为是空间x,y,z 在结构化网格结构中的变量。
三维网技术论坛! p9 T0 u2 z+ @, i6 c非机构化:可以是多种形状,四面体(也就三角的形状),六面体,棱形。
对任何网格,都是希望网格单元越规则越好,比如六面体希望是长方形,对于四面体,高质量的四面体网格就是正四面体。
sknewness的概念这里同样适用,sknewness越小,网格形状相比正方形或者正四面体就越扭曲。
越接近1就越好。
很明显非结构化网格也可以是六面体,但非结构化六面体网格没有什么B,IJK 的概念,他们就是充满整个空间。
对于复杂形状,结构化网格比较难以生成。
主要是生成时候要建立拓扑,拓扑是个外来词,英语是topology,所以不要试图从字面上来理解它的意思。
其实拓扑就是指一种有点和线组成的结构。
叶轮机CFD网格生成
ii
南京航空航天大学硕士学位论文
图表清单
图 2.1 物理区域与计算区域的映射示意图............................... 8 图 2.2 Lagrange 线性基本多项式.......................................9 图 2.3 Lagrange 二次基本多项式......................................10 图 2.4 Hermite 三次基本多项式.......................................11 图 2.5 计算区域和物理区域边界的映射关系............................ 11 图 2.6 采用二维 TFI 方法在叶轮机两个直叶片之间生成的结构化网格...... 12 图 2.7 利用 TFI 在两个同心圆内生成网格.............................. 13 图 2.8 利用 TFI 在梯形内生成网格.................................... 13 图 2.9 椭圆型方程生成网格问题的示意图.............................. 16 图 2.10 曲线坐标系中的弧长示意图................................... 19 图 2.11 利用 Laplace 方法在带两个四分之一圆周的矩形区域内部生成网格. 20 图 2.12 九点差分示意图............................................. 22 图 2.13 利用带控制函数的方法在翼型周围生成网格......................24 图 2.14 从计算空间 (ξ ,η ) 到物理空间 ( x, y ) 的变换....................... 25 图 2.15 NACA0012 翼型周围的网格.....................................35 图 2.16 从计算空间到参数曲面的转换................................. 36 图 2.17 参数空间 Pst 中的子块 ( p, q ) 示意图............................. 40 图 2.18 参数化曲面网格生成图形..................................... 41 图 2.19 图 2.18 的左视图............................................ 41 图 3.1 Voronoi 区域.................................................44 图 3.2 Delaunay 三角形..............................................44 图 3.3 不同的联结方法对三角形最小角影响的示例...................... 45 图 3.4 Delaunay 三角形化的实施过程..................................45 图 3.5 初始化三角形生成过程示例.................................... 47 图 3.6 内点长度标尺的确定.......................................... 48 图 3.7 初始化三角形 R(k)>>1 图示.................................... 48 图 3.8 判断一点是否在求解域内的图示................................ 50 图 3.9 去掉“过小”单元的操作...................................... 52 图 3.10 由同心圆边界上点形成的初始网格............................. 52 图 3.11 同心圆内生成的最终网格..................................... 52
CFD是什么技术
CFD是什么技术2008-09-10 09:42【CFD是什么技术】CFD是英文Computational Fluid Dynamics(计算流体动力学)的简称。
它是伴随着计算机技术、数值计算技术的发展而发展的。
简单地说,CFD相当于"虚拟"地在计算机做实验,用以模拟仿真实际的流体流动情况。
而其基本原理则是数值求解控制流体流动的微分方程,得出流体流动的流场在连续区域上的离散分布,从而近似模拟流体流动情况。
即CFD=流体力学+热学+数值分析+计算机科学。
流体力学研究流体(气体与液体)的宏观运动与平衡,它以流体宏观模型作为基本假说。
流体的运动取决于每个粒子的运动,但若求解每个粒子的运动即不可能也无必要。
计算流体动力学概述1 什么是计算流体动力学计算流体动力学(Computational Fluid Dynamics,简称CFD)是通过计算机数值计算和图像显示,对包含有流体流动和热传导等相关物理现象的系统所做的分析。
CFD的基本思想可以归结为:把原来在时间域及空间域上连续的物理量的场,如速度场和压力场,用一系列有限个离散点上的变量值的集合来代替,通过一定的原则和方式建立起关于这些离散点上场变量之间关系的代数方程组,然后求解代数方程组获得场变量的近似值CFD可以看做是在流动基本方程(质量守恒方程飞动量守恒方程、能量守恒方程)控制下对流动的数值模拟。
通过这种数值模拟,我们可以得到极其复杂问题的流场内各个位置上的基本物理量(如速度、压力、温度、浓度等)的分布,以及这些物理量随时间的变化情况,确定旋涡分布特性、空化特性及脱流区等。
还可据此算出相关的其他物理量,如旋转式流体机械的转矩、水力损失和效率等。
此外,与CAD联合,还可进行结构优化设计等。
CFD方法与传统的理论分析方法、实验测量方法组成了研究流体流动问题的完整体系,图1给出了表征三者之间关系的“三维”流体力学示意图理论分析方法的优点在于所得结果具有普遍性,各种影响因素清晰可见,是指导实验研究和验证新的数值计算方法的理论基础。
流体机械CFD中的网格生成方法进展
文章编号: 1005 0329(2010)04 0032 06技术进展流体机械CFD中的网格生成方法进展刘厚林,董 亮,王 勇,王 凯,路明臻(江苏大学,江苏镇江 212013)摘 要: 网格生成技术是流体机械内部流动数值模拟中的关键技术之一,直接影响数值计算的收敛性,决定着数值计算结果最终的精度及计算过程的效率;本文在分析大量文献的基础上,首先,对流体机械CFD中的网格生成方法即结构化网格、非结构化网格、混合网格进行了比较全面的总结,系统地分析这些网格划分方法的机理、特点及其适用范围;其次,对特殊的网格生成技术,如曲面网格生成技术、动网格技术、重叠网格生成技术、自适应网格技术进行了阐述;再次,指出了良好的网格生成方法应具备的特点;最后提出了网格生成技术的发展趋势。
关键词: 流体机械;网格生成;计算流体动力学;动网格;自适应网格中图分类号: TH311 文献标识码: A do:i10.3969/.j i ssn.1005-0329.2010.04.008Overvie w onM esh Generati o n M et hods i n CF D of F lui d M achineryL IU H ou-lin,DONG L iang,W ANG Y ong,W ANG K a,i LU M i ng-zhen(Jiangsu U n i v ers it y,Zhenji ang212013,Ch i na)Abstrac t: M esh genera ti on techno logy i s one of the cr iti ca l technology f o r fl u i d m ach i nery fl ow nume rica l s i m u l at-i on,and d-i rectly i nfl uence t he astr i ngency o f nume rical si m u l a ti on,wh ich has an i m portan t e ffect on the nu m er ica l s i m u l a tion results,fi na l precision and the effi c i ency o f compu tati onal process.O n the bas i s o f analyzi ng a great dea l litera t ures,firstl y,m esh genera ti on m ethods and t heory of fluid m ach i nery are comprehens i ve l y su mm ar i zed such as structured mesh,unstructured mesh,hybrid gr i d and respecti ve re lati ve m erits and the pr i nciple,charac teristcs and scopes of t hese m ethods we re sy stema ti ca lly ana l ysed.Second-ly,Spec i a lm esh generation m ethod w ere su mm ar i zed,such as surface m eshi ng,m ov ing gr i d,adapti ve gr i d and especiall y i ntro-duced the pr i nci p le and app licati on areao f adapti ve g ri d.T h irdly,the character i sti c o f m esh g enerati on m e t hod w ere pion ted out.F i na lly,t he trends of mesh generati on are presen ted,and the tre m endous d ifference i s analyzed i n mesh au t om atic gene ra tion at a-broad and the necessary o f exp l o iti ng CFD soft w are and resea rchi ng the m esh auto m atic gene ration techn i que i n our country are put forwa rd.K ey word s: fl uids m achi nery;m esh g enerati on;co m puta ti ona l fl u i d dyna m ics;mov i ng gr i d;adaptive gr i d1 前言计算流体动力学(CFD)中,按一定规律分布于流场中的离散点的集合叫网格,产生这些节点的过程叫网格生成。
CFD网格及其生成方法概述
CFD网格及其生成方法概述网格是CFD模型的几何表达形式,也是模拟与分析的载体。
网格质量对CFD计算精度和计算效率有重要影响。
对于复杂的CFD问题,网格生成极为耗时,且极易出错,生成网格所需时间常常大于实际CFD计算的时间。
因此,有必要对网格生成方式给以足够的关注。
1 网格类型网格(grid)分为结构网格和非结构网格两大类。
结构网格即网格中节点排列有序、邻点间的关系明确。
对一于复杂的儿何区域,结构网格是分块构造的,这就形成了块结构网格(block-structured grids)。
与结构网格不同,在非结构网格(unstructured grid)中,节点的位置无法用一个固定的法则予以有序地命名。
这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。
非结构网格一般通过专门的程序或软件来生成。
2 网格单元的分类单元(cell)是构成网格的基本元素。
在结构网格中,常用的ZD网格单元是四边形单元,3D网格单元是六面体单元。
而在非结构网格中,常用的2D网格单元还有三角形单元,3D网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。
3 单连域与多连域网格网格区域(cell zone)分为单连域和多连域两类。
所谓单连域是指求解区域边界线内不包含有非求解区域的情形。
单连域内的任何封闭曲线都能连续地收缩至点而不越过其边界。
如果在求解区域内包含有非求解区域,则称该求解区域为多连域。
所有的绕流流动,都属于典型的多连域问题,如机翼的绕流,水轮机或水泵内单个叶片或一组叶片的绕流等。
均是多连域的例子。
对于绕流问题的多连域内的网格,有O型和C型两种。
O型网格像一个变形的圆,一圈一圈地包围着翼型,最外层网格线上可以取来流的条件,如图6所示。
C型网格则像一个变形的C字,围在翼型的外面,如图7所示。
这两种网格部属于结构网格。
4 生成网格的过程无论是结构网格还是非结构网格,都需要按下列过程生成网格:(1)均建立几何模型。
cfd fluent处理流程
cfd fluent处理流程CFD Fluent是一种流体力学仿真软件,具有广泛的应用领域,包括空气动力学,热传递,生物医学,化学反应和水力学等方面。
它被广泛地用于有效的流体力学仿真,可以用于设计和优化任何流场,从而提高产品的效率和性能。
在本文中,我们将讨论一个完整的CFD Fluent处理流程,以帮助您更好地了解这个强大的工具的操作和应用。
第一步:准备模型在处理流程中的第一步是准备需要仿真的模型。
这个步骤可以从CAD格式等其他格式导入。
在引进我们将要仿真的物体之后,需要对CAD图形进行优化。
这包括清理冗余网格及小细节,从而减少网格数量,以更好地优化仿真结果。
第二步:生成网格生成网格是流体力学仿真的最关键部分之一。
在此步骤中,需要将模型分割成小网格,以便能够对流体力学进行精细分析。
简单来说,CFD Fluent处理流程中,网格分成小菱形,由大量相互排列的三角形组成,来构建网格。
第三步:定义流体和边界条件之后是定义流体和边界条件,确定流体将如何运动和处理。
在此步骤中,我们需要定义模拟的流体,包括温度,密度,黏性等参数。
同时,我们还需要设置边界条件,主要包括流体入口和出口,墙壁,旋转部件等。
这有助于我们了解流体临界参数、流量、速度、压力等等。
第四步:运行仿真完成准备工作之后,我们可以开始运行仿真。
在CFD Fluent处理流程中,仿真运行需要耗费大量时间,因此需要运用高性能的计算器。
随着仿真的运行,可以查看CFD Fluent中不同的仿真参数,包括曲线图,等值图以及动画。
通过这些图形,可以迅速了解流体在不同时间和空间位置的变化。
第五步:结果分析最后一步是结果分析。
根据仿真的结果,可以调整流体力学细节,在不同的参数下对结果进行分析并比较,明确出最优结果。
CFD Fluent处理流程的步骤已经介绍完了,从以上可看出CFD Fluent需要专业的知识和技能。
总的来说,了解整个流程可以使我们更好地掌握CFD Fluent的操作,从而更好地应用于实际问题的解决。
CFD-12-05-计算网格技术_基础和结构化
嵌套网格(chimera)
grid: 480 blocks, 12 mill. cellD structured mesh with 9 blocks
Full structured grids generated with ICEM
Smooth mesh to capture the wakes
(3). Grid spacing can be made smaller in regions of
strong variable variation. Disadvantages:
(1). The transformed equations contain more terms thereby
increasing both the difficulty of programming and the cost of solving the equations
Complex geometries (Boundary-Fitted Non-Orthogonal Grids): Advantages: (1). Can be adapted to any geometry (2). Boundary conditions are easy to apply
Commercial software (Gridgen, Gambit, etc.)
Examples
(a) Symmetric (b) centerbody (c) asymmetric
求解偏微分方程方法:
P (, , ) 2 Q (, , ) R (, , )
Grid generation
结构化网格生成方法(structured grid) 三角形网格生成方法(triangle/tetrahedron) 直角网格生成方法(Cartesian grid)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CFD网格及其生成方法概述
作者:王福军
网格是CFD模型的几何表达形式,也是模拟与分析的载体。
网格质量对CFD计算精度和计算效率有重要影响。
对于复杂的CFD问题,网格生成极为耗时,且极易出错,生成网格所需时间常常大于实际CFD计算的时间。
因此,有必要对网格生成方式给以足够的关注。
1 网格类型
网格(grid)分为结构网格和非结构网格两大类。
结构网格即网格中节点排列有序、邻点间的关系明确,如图1所示。
对一于复杂的儿何区域,结构网格是分块构造的,这就形成了块结构网格(block-structured grids)。
图2是块结构网格实例。
图1 结构网格实例
图2 块结构网格实例
与结构网格不同,在非结构网格(unstructured grid)中,节点的位置无法用一个固定的法则予以有序地命名。
图3是非结构网格示例。
这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。
非结构网格一般通过专门的
程序或软件来生成。
图3 非结构网格实例
2 网格单元的分类
单元(cell)是构成网格的基本元素。
在结构网格中,常用的ZD网格单元是四边形单元,3D网格单元是六面体单元。
而在非结构网格中,常用的2D网格单元还有三角形单元,3D 网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。
图4和图5分别示出了常用的2D和3D网格单元。
图4 常用的2D网格单元
图5 常用的3D网格单元
3 单连域与多连域网格
网格区域(cell zone)分为单连域和多连域两类。
所谓单连域是指求解区域边界线内不包含有非求解区域的情形。
单连域内的任何封闭曲线都能连续地收缩至点而不越过其边界。
如果在求解区域内包含有非求解区域,则称该求解区域为多连域。
所有的绕流流动,都属于典型的多连域问题,如机翼的绕流,水轮机或水泵内单个叶片或一组叶片的绕流等。
图2及图3均是多连域的例子。
对于绕流问题的多连域内的网格,有O型和C型两种。
O型网格像一个变形的圆,一圈一圈地包围着翼型,最外层网格线上可以取来流的条件,如图6所示。
C型网格则像一个变形的C字,围在翼型的外面,如图7所示。
这两种网格部属于结构网格。
图6 O型网格
图7 C型网格
4 生成网格的过程
无论是结构网格还是非结构网格,都需要按下列过程生成网格:
(1)均建立几何模型。
几何模型是网格和边界的载体。
对于二维问题,几何模型是二维面;对于三维问题,几何模型是三维实体。
(2)划分网格。
在所生成的几何模型土应用特定的网格类型、网格单元和网格密度对面或体进行划分,获得网格。
(3)指定边界认域。
为模型的每个区域指定名称和类型,为后续给定模型的物理属性、边界条件和初始条件做好准备。
生成网格的关键在上述过程中的步骤(2)。
由于传统的CFD基于结构网格,因此,目前有多种针对结构网格的成熟的生成技术,而针对非结构网格的生成技术要更复杂一些。
5 生成结构网格的贴体坐标法
如果计算区域的各边界是一个与坐标轴都平行的规则区域,则可以很方便地划分该区域,快速生成均匀网格。
但实际工程问题的边界不可能与各种坐标系正好相符,于是,需要采用数学方法构造一种坐标系,其各坐标轴恰好与被计算物体的边界相适应,这种坐标系就称为贴体坐标系(body-fitted coordinates)。
直角坐标系是矩形区域的贴体坐标系,极坐标是环扇形区域的贴体坐标系。
使用贴体坐标系生成网格的方法的基本思想可叙述如下。
(a) x-y物理平面(b) ξ-η计算平面
图8 贴体坐标示意图
假定有图8(a)所示的在x-y少平面内的不规则区域,现在,为了构造与该区域相适应的贴体坐标系,在该区域中相交的两个边界作为曲线坐标系的两个轴,记为ξ和η。
在该物体的4个边上,可规定不同地点的ξ和η值。
例如,我们可假定在A点有ξ=0,η=0,而在C点有ξ=1,η=1。
这样,就可把ξ-η看成是另一个计算平面上的直角坐标系的两个轴,根据上面规定的ξ和η的取值原则,在计算平面上的求解区域就简化成了一个矩形区域,只要给定每个方向的节点总数,立即可以生成一个均匀分布的网格,如图8(b)所示。
现在,如果能在x-y平面上找出与ξ-η平面上任意一点相对应的位置,则在物理平面上的网格可轻松生成。
因此,剩下的问题是如何建立这两个平面间的关系,这就是生成贴体坐标的方法。
日前常用的生成贴体坐标的方法包括代数法和微分方程法。
所谓代数法就是通过一些代数关系把物理平面上的不规则区域转换成计算平面上的矩形区域。
各种类型的代数法很多,常见的包括边界规范法、双边界法和无限插值法等。
微分方程法是通过一个微分方程把物理平面转换成计算平面。
该方法的实质是微分方程边值问题的求解。
该方法是构造贴体坐标非常有效的方法,也是多数网格生成软件广泛采用的方法。
在该方法中,可使用椭圆、双曲型和抛物型偏微分方程来生成网格,其中,椭圆型方程用得较多。
关于代数法和微分方程法的详细信息可参考相关文献。
6 生成网格的专用软件
网格生成是一个“漫长而枯燥”的工作过程,经常需要进行大量的试验才能取得成功。
因此,出现了许多商品化的专业网格生成软件。
如GAMBIT、TGrid、GeoMesh、preBFC和ICEM CFD等。
此外,一些CFD或有限元分结构分析软件,如ANSYS、I-DEAS、NASTRAN、PATRAN和ARIES等,也提供了专业化的网格生成工具。
这些软件或工具的使用方法大同小异,且各软件之间往往能够共享所生成的网格文件,例如FLUENT就可读取上述各软件所生成的网格。
有一点需要说明,由于网格生成涉及几何造型,特别是3D实体造型,因此,许多网格生成软件除自己提供几何建模功能外,还允许用户利用CAD软件(如AutoCAD、
Pro/ENGINEER)先生成几何模型,然后再导入到网格软件中进行网格划分。
因此,使用
前处理软件,往往需要涉及CAD软件的造到功能。
(end)。