第二讲 网格生成与坐标变换
网格技术网格基础知识

网格技术网格基础知识导读:讨论网格的基础知识,网格质量要求及判定指标,并探讨网格优化问题。
数值仿真的首要工作是前处理,即网格划分,网格划分的本质是利用有限个离散的单元体来代替连续的计算域。
在数值仿真三个阶段中,前处理占约40-60%,数值计算5-20%,计算处理后处理约占30%。
因此前处理的工作既繁琐又重要,它是进行数值仿真正确分析的基础。
网格特征几何要素:网格生成就是将研究对象离散成单元的过程,二维/三维网格主要包括5个几何要素:(1)Cell:单元体,离散化后的计算域网格所确定。
;(2)Face:面,Cell的边界;(3)Edge:边,Face的边界;(4)Node:节点,Edge的交汇处/网格点;(5)Zone:区域,一组节点、面和(或者)单元体。
边界条件数据存储在Face中,材料数据和源项存储在Zone的Cell中网格形状:2D模拟中,常见的网格形状为三角形和四边形;3D 模拟中,包括有四面体、六面体、棱柱形和多面体网格。
结构化与非结构化网格:结构化网格是指网格区域内所有内部点都具有相同的毗邻单元,意味着每个点都有相同数目的邻点。
结构化网格的优势在于:区域边界拟合容易实现、网格生成速度快、数据结构简单、网格质量好。
其不足在于适用范围较窄,对复杂几何模型划分难度高。
非结构化网格是指网格区域的内部点不具有相同的毗邻单元,也就是说区域内不同内部点相连的网格数目不同。
非结构化网格对于复杂几何模型的网格生成比较友好。
网格类型选取网格类型的选取需要考虑三方面:网格划分时间、计算量以及精确度。
网格划分时间:对于简单的几何体,无论是结构化网格还是非结构化网格,其划分时间都不是太长。
对于复杂的几何体,划分分块结构网格非常耗时,因此对于复杂几何体,使用非结构化网格将大大减少网格划分时间。
计算量:对于复杂几何体,相比于四边形或六面体网格,采用三角形或四面体网格会使网格数大大减少,这是因为相比较而言,三角形/四面体网格更容易调整大小,另外将整体计算域的四面体网格转换为多面体网格也能减少总网格数。
坐标变换最通俗易懂的解释(推导+图解)

坐标变换的作用
在一个机器人系统中,每个测量元件测量同一物体得出的信息是不一样的,原因
实现坐标变换所需的数据
我们常用出发与坐标系原点终止于坐标系中坐标点的向量来表示坐标系中坐标点相对于坐标原点的位置(距离+方位)。
坐标系的相互转化必须以地球坐标系为媒介才可以实现,即坐标系的相互转化必须已知“任意坐标系中各个坐标轴在world坐标系中的坐标”:
位姿
坐标变换中旋转的实质
坐标变换的实质就是“投影”。
首先,我们解读一下向量是如何转化为坐标的:
其实,这个矩阵的乘法与卷积有着异曲同工之妙。
旋转矩阵的性质:
从B到A的转化:
从A到B的转化:
、都是单位正交仿真,因此
坐标变换中平移的实质
向量可以在坐标系中任意移动,只要不改变向量的方向和大小,向量的属性不会发生变化。
但是我们研究的是坐标系B中一个坐标点在坐标系A中的映射,因此
多坐标变换
首先,我们要知道世界坐标系下坐标系A/坐标系B的各个坐标轴在世界坐标系(参
如何实现坐标变换
其中O1O2是从O1指向O2的向量。
微分坐标变换与曲线网格生成方法研究

21 0 1年第 1 2期
孙广才 : 分坐标 变换 与曲线 网格生成方法研究 微
并 给 出 了一组 生成 正交 曲线 网格 的控 制 函数表 达式 .
’
1 微分变换
在二维空间 , 微分坐标系( 叼 与直角坐标系( Y 之间的关系可以表示为: ( Y , ,) ,) = ,) 叼:n xY ( ,)
标 系 . 图 1所示 . 如
图 1 坐 标 变 换 示 意 图
边界拟合坐标 的网格生成实际上是一个边值问题 , 可以通过求解偏微分方程边值问题来实现. 这个方
法最 早是 由 Wis w提 出的 , nl o 以后 不少 学者 都对 此方 法 的发 展做 出过 贡献 , 比较 系统地 研究 这一 方 法 的 但 当推 T o po 、h me 及 Mat . h m snT a s rn i 本文 将 主要通 过 对微分 坐 标变 换 的讨论 , 该 I ̄ 作 进一 步 的探讨 , 对 ; - I
0 引 言
在流体力学问题数值模拟计算中 , 同一几何形状区域或流动现象可以采用不 同的坐标系来表达 , 坐标
系之间可以由一 一对应 的关 系相互转 换. 最常用 和最 基本 的坐标 系是笛 卡尔 坐标 系 ( 直线 直角 坐标 系)( Y , ,) 但对于某些不规则几何形状的处理可能采用其他坐标 系( 田 ( , ) 如曲线坐标 系) 描述更为方 便, 因而经常需要进行坐标变换. 常用的坐标变换主要分为代数变换和微分变换两大类. 代数变换是指一 个坐标系的坐标可 以用笛卡尔坐标的代数式来表示 , 称此坐标系为代数坐标系 , 两坐标系之间的变换称为 代数变换. 如果一个坐标系的坐标( ) , 与笛卡尔坐标系之 间的关系需要用微分方程来表示 , 则称此坐标 系为微分坐标系 , 两坐标系之间的变换称为微分变换…. 在处理不规则几何形状区域的流动现象时 , 最理想的坐标系是各坐标轴与所计算物理 区域的边界线 重合 , 这样无需对边界进行特殊处理 , 以使计算在规则的变换域 内进行 , 可 这样的坐标 系称为边 界拟合坐
坐标变换基础知识
0、前言本文主要介绍了三相电力变换设备中常用的坐标变换理论已经多端口网络的功率计算方法。
不是什么创新内容,目的是帮助理解而已。
因为坐标变换本来很简单,但是还是有好多人在其中纠结,或者搞不明白为什么,或者不理解为什么会有多种变换形式。
同时也表达我的一些观点:一、任何高深的理论经过在实际应用中总是会转化为简单的计算或者简单的计算式,尤其以信号处理为代表。
很厚的一本书,看了半天也看不懂什么是IIR ,但是拿到别人的程序,其中只有一句话。
因为用的人不一定要懂很多,只要知道是什么,如果需要修改怎么改就可以了,所以本文的介绍力求深入浅出。
二、恰恰相反,实际应用中很简单的过程可能都有特定的甚至十分深奥的理论支持。
所以,搞工程的人很可能对所有的过程讲的头头是道,但是在深问为什么就打不上来了。
这样就是深度达不到,眼界也达不到。
所以,本文避免了许多论文里一上来就“在三相对称系统中通常采用……坐标变换”,而是尽可能地把自己了解到的相关的知识加进来。
种水稻的人可能没有系统的理论知识,但是袁隆平不可能在没有系统的知识的前提下就发现了天然不孕系水稻,并培育出两系、三系杂交水稻。
注:相关知识的拓展可以自行上网搜索;另外,本文没有仔细检查,难免有疏忽和错误之处,请阅读时注意。
一、背景知识介绍1.巴拿赫(Banach )空间:完备的赋范线性空间。
略去完备性定义。
2.希尔伯特(Hilbert )空间:定义了内积的Banach 空间或者完备的内积空间。
设U 为数域K (实数或者复数)上的线性空间,对于U y x ∈∀,,如果存在唯一的K y x >∈<,,内积满足下列三条(内积定理): a )对第一变元的线性:><+><>=+<z y z x z y x ,,,βαβα b )共轭对称性:><>=<x y y x ,,c )正定性:0,>≥<x x ,当且仅当0=x 时有0,>=<x x则称><y x ,为x 和y 的内积,U 为内积空间。
第二讲-几何建模

e e->opp()
e->start() = e->opp()->end();
e->start()
class HalfEdge { HalfEdge *opp; Vertex *end; Face *left; HalfEdge *next; };
HalfEdge e;
e->left()
Non-Manifold
Closed Manifold
Open Manifold
拓扑
v = 12 f = 14 e = 25 c=1 g=0 b=1 图的亏格(genus):handle的数目。 在沿其撕裂后,能够使图保持连通 的封闭路径的最大数目的一半
Euler-Poincare 公式 v+f-e = 2(c-g)-b
• • • • 将一个隐式的曲面转换为三角网格 在3D网格(grid)上定义的隐式曲面 在每个立方体(cube)中根据8个顶点的标量值来确定重构曲面 一般用于医学数据
点云
深度图像
网格(Mesh)
– – – – – 图形学中最常用的表达 简单 可表达复杂形状 图形硬件支持 一般为三角网格
为什么是三角网格
网格的数据结构是否优秀
• 构建数据结构的时间复杂度
• 进行一个查询操作的时间复杂度 • 进行一个网格编辑操作的时间复杂度(更 新数据结构) • 空间复杂度
数据结构举例
• 面列表( List of faces)
• 邻接矩阵(Adjacency matrix) • 半边结构(Half-edge)
一个实际的文件例子 .obj文件
All neighboring vertices
edge
一文搞定初中数学网格问题
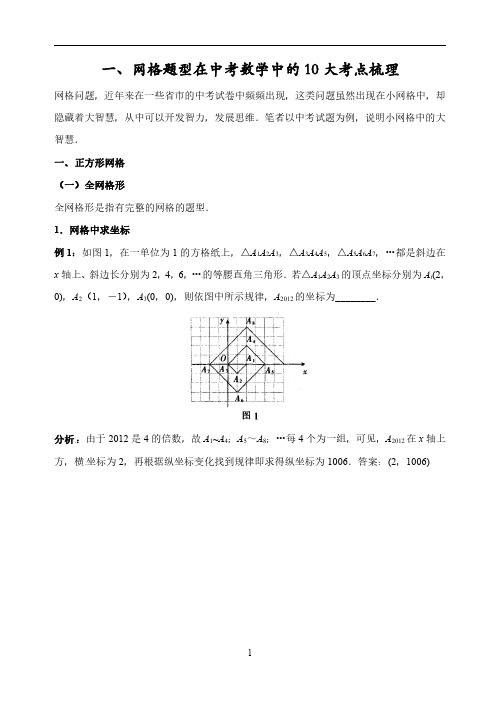
一、网格题型在中考数学中的10大考点梳理网格问题,近年来在一些省市的中考试卷中频频出现,这类问题虽然出现在小网格中,却隐藏着大智慧,从中可以开发智力,发展思维.笔者以中考试题为例,说明小网格中的大智慧.一、正方形网格(一)全网格形全网格形是指有完整的网格的题型.1.网格中求坐标例1:如图1,在一单位为1的方格纸上,△A1A2A3,△A3A4A5,△A5A6A7,…都是斜边在x轴上、斜边长分别为2,4,6,…的等腰直角三角形.若△A1A2A3的顶点坐标分别为A t(2,0),A2(1,-1),A3(0,0),则依图中所示规律,A2012的坐标为________.分析:由于2012是4的倍数,故A1~A4;A5~A8;…每4个为一组,可见,A2012在x轴上方,横坐标为2,再根据纵坐标变化找到规律即求得纵坐标为1006.答案:(2,1006)2.网格与等腰三角形例2:如图2所示的正方形网格中,网格线的交点称为格点°已知A、B是两格点,如果C 也是图中的格点,且使得△ABC为等腰三角形,则点G的个数是()(A)6(B)7(C)8(D)9分析:有两种情况:①AB为等腰△ABC底边,C在A B的中垂线上,因此,符合条件的C点有4个;②AB为等腰ABC其中的一条腰,符合条件的C点有4个,应选C.本题考查了等腰三角形的判定,解答本题关键是根据题意,画出符合实际条件的图形.3.网格与直角三角形例3:如图3,在网格中有一个直角三角形(网格中的每个小正方形的边长均为1个单位长度).若以该三角形一边为公共边画一个新三角形与原来的直角三角形一起组成一个等腰三角形,要求新三角形与原来的直角三角形除了有一条公共边外,没有其它的公共点,新三角形的顶点不一定在格点上.那么符合要求的新三角形有()(A)4个(B)6个(C)7个(D)9个分析:根据题意可知:如图4,以原三角形AB边为公共边的三角形有4个,分别如图上D1,D2,D3,D4;以原三角形BC边为公共边的三角形有2个,分别如图上D5,D6;以原三角形AC边为公共边的三角形只有1个,如图上D.符合要求新三角形有7个,选C例4:如图5是5×5的正方形网格,△ABC的顶点都在小正方形的顶点上,像△ABC这样的三角形叫格点三角形.画与△ABC有一条公共边且全等的格点三角形,这样的格点三角形最多可以画出_______个.分析:如图6,以BC为公共边可画出△BDC,△BEC,△BFC三个三角形和原三角形全等;以AB为公共边可画出三个三角形△ABC、△ABM、△AB H和原三角形全等,所以可画出6个.5.网格与相似例5:图7所示4×4的正方形网格中,小正方形的边长均为1,三角形的顶点都在格点上,则与△ABC相似的三角形所在的网格图形是()[来源学*科*网][来源学科网Z XX K]分析:根据勾股定理,得BC=,AB,AC;根据勾股定理的逆定理可判断△ABC为直角三角形,∠ABC=90°,BC:AB=1:2.在四个图形中,显然答案B中的三角形为直角三角形且两条直角边的比为1:2,选B.例6:如图8,在3×5的正方形网格中,每个小正方形的边长为1,求图中点A到P Q的距离A H的长.分析:连结A P,AQ组成一个三角形.你可以用长方形面积减去三个直角三角形求得[来源学科网]出△A P Q的面积,而S△A P Q=12P Q×A H,P Q的长用勾股定理计算,求得答案为755.7.网格中求三角函数[来源:Z xx k.C o m]例7:如图9,在正方形网格中有△ABC,则s i n∠ABC的值等于()(A)31010(B)1010(C)13(D)10分析:首先利用勾股定理分别算出AB、BC、AC的长度,再利用勾股定理的逆定理得出∠ACB=90°,最后根据锐角三角函数的定义求出s i n∠ABC的值,选B.8.网格与圆例8:如图10,边长为1的小正方形构成的网格中,半径为1的⊙O 的圆心O 在格点上,点A 、B 、C 、E 也都在格点上,CB 与⊙O 相交于点D ,连结ED ,则∠AED 的正切值等于_______.分析:本题是锐角三角函数的定义和圆周角的运用,解答本题的关键是利用同弧所对的圆周角相等把求∠AED 的正切值转化成求∠ACB 的正切值.tan ∠AED =tan ∠ABC =12AC AB .(二)局部网格形局部网格形指是网格图案的一部分,需要通过添线补全网格的题型.例9:如图11(1),每个小正方形的边长为1,A 、B 、C 是小正方形的顶点,则∠ABC 的度数为()(A )90°(B )60°(C )45°(D )30°分析:先把局部网格补全成如图11(2)所示,易见△ACD 与△CBE 全等,可得出AC =BC ,∠ACB =90°,所以∠ABC =45°.选C .二、长方形网格例10:如图12,在长方形网格中,每个小长方形的长为2,宽为1,A、B两点在网格格点上,若点C也在网格格点上,以A、B、C为顶点的三角形面积为2,则满足条件的点C 个数是()(A)2(B)3(C)4(D)5[来源学科网]分析:底和高分别是4和1的有两个,底和高分别是2和2的有两个,选C.二、中考网格型试题赏析近几年中考中,网格型试题可谓大放异彩,这类试题构思精巧、形式活泼,能很好地考查图形变换、勾股定理、相似等数学知识,体现分类讨论、数形结合等重要的数学思想,当网格作为背景与双曲线、抛物线、圆、三角形结合时,更会出现许多让人意想不到的思路、方法,使我们在解题中感受到无穷的乐趣,本文撷取其中的几例进行解析,供参考.一、网格与双曲线结合例1:在边长为1的4×4方格上建立直角坐标系(如图1),在第一象限内画出反比例函数16y x =、6y x =、4y x=的图象,它们分别经过方格中的一个格点、二个格点、三个格点;在边长为1的10×10方格上建立直角坐标系(如图2),在第一象限内画出反比例函数的图象,使它们经过方格中的三个或四个格点,则最多可画出()条.(A )12(B )13(C )25(D )50分析:易知系数k 为合数,且能分解成两个均不超过10的正整数的乘积的形式.如4=1×4=2×2,则反比例函数4y x=的图象经过以下3个格点:(1,4),(2,2),(4,1).6=1×6=2×3,则反比例函数6y x =的图象经过以下4个格点:(1,6),(2,3),(3,2),(6,1).经过尝试,符合条件的k 值共有13个,分别为:4,6,8,9,10,12,16,18,20,24,30,36,40.所以,经过方格中的三个或四个格点的反比例函数的图象最多可以画出13条.故选B .二、网格与抛物线结合例2:已知图3中的每个小方格都是边长为1的小正方形,每个小正方形的顶点称为格点,请你在图中任意画一条抛物线,问所画的抛物线最多能经过81个格点中的多少个?()(A )6(B )7(C )8(D )9分析:我们先解决如下问题:对于抛物线y =ax 2+bx +c ,当a 、b 、c 满足什么条件时,当x 取任意整数时,函数值y 都是整数?(为叙述方便,不妨假设抛物线开口向上.)当x =0时,y =c ;当x =l 时,y =a +b +c .∴c 为整数,a +b +c 为整数,∴a +b 必为整数,又∵当x =2时,y =4a +2b +c =2a +2(a +b )+c 是整数,∴2a 必为整数,∴a 应为12的整数倍,即a =12,1,32,2,…从对称的角度考虑,建立如图4所示的平面直角坐标系.(1)若抛物线的顶点在格点上,要使抛物线尽可能多地经过格点,显然应使抛物线过原点.所画抛物线y =ax 2(n =12,1,32,2,…)最多能经过5个格点.(2)若抛物线的顶点不在格点上,要使抛物线尽可能多地经过格点,显然应使抛物线),=ax 2+bx +c 过原点和(1,0).所画抛物线y =ax (x -1)(a =12,1,32,2,…)最多能经过8个格点.此时a =12,这8个格点分别为:(-3,6),(-2,3),(-1,1),(0,0),(1,0),(2,1),(3,3),(4,6).[来源学&科&网Z&X &X &K]综上所述,抛物线最多能经过81个格点中的8个,故选C .三、网格与圆结合例3:请你在12×12的网格图形中任意画一个圆,则所画的圆最多能经过169个格点中的____个格点.分析:从对称的角度考虑,建立如图5所示的平面直角坐标系.(1)如图5,若圆心在格点上,要使圆尽可能多地经过格点,显然应使圆心过原点,所画圆最多能经过12个格点,此时圆的半径为5.这12个格点分别为:(0,5),(3,4),(4,3),(5,0),[来源学§科§网](4,-3),(3,-4),(0,-5),(-3,-4),(-4,-3),(-5,0),(-4,3),(-3,4).(2)如图6,若圆心不在格点上,要使圆尽可能多地经过格点,显然应使圆心过(12,12),所画圆最多能经过16个格点,此时圆的半径为2,这16个格点分别为:(2,6),(4,5),(5,4),(6,2),(6,-1),(5,-3),(4,-4),(2,-5),(-1,-5),(-3,-4),(-4,-3),(-5,-1),(-5,2),(-4,4),(-3,5),(-1,6).综上所述,所画的圆最多能经过169个格点中的16个格点.四、网格与三角形结合例4:如图7,将△ABC 放在每个小正方形的边长为1网格中,点A 、B 、C 均落在格点上.(1)△ABC 的面积等于____;(2)若四边形DEF G 是△ABC 中所能包含的面积最大的正方形,请你在如图7所示的网格中,用直尺和三角尺画出该正方形,并简要说明画图的方法.分析:(1)S △ABC =12×4×3=6;(2)如果正方形的一边落在三角形的一边上,其余两个顶点分别在三角形的另外两条边上,则这样的正方形面积是最大的.如图8,在△ABC 中,AB =c ,AB 边上的高CN =h c ,△ABC 的面积为S ,正方形的一边DE 落在AB 上,其余两个顶点F 、G 分别在BC 、AC 上.设正方形DEF G 的边长是x.所以,图8中正方形一边落在AB 边上,另两个顶点落在其他两边上时,121212744x ==+;图8中正方形一边落在BC边上,另两个顶点落在其他两边上时,图8中正方形一边落在AC 边上,另两个顶点落在其他两边上时,[来源学科网Z|X X|K]∴当正方形一边落在BC边上时,正方形DEF G的面积最大.画法一:如图9,在AB上任取一点P,作P Q⊥BC于点Q,以P Q为一边在△ABC内部画正方形P QMN;作射线BN交AC于点D,过点D作D G⊥BC于点G,作DE⊥D G交AB 于点E,过点E作EF⊥BC于点F,则四边形DEF G即为所求.证明:由画图过程易得四边形DEF G为矩形,∵D G⊥BC,NM⊥BC,∴D G//NM,画法二:如图10,取格点P,连结P C,过点A画P C的平行线,与BC交于点Q,连结P Q 与AC相交得点D;过点D画CB的平行线,与AB相交得点E,分别过点D、E画P C的平行线,与CB相交得点G、F,则四边形DEF G即为所求.证明:由画图过程易得四边形DEF G为平行四边形,[来源学科网]由格点P的位置易判断P C=CB,且P C⊥CB,∴D G⊥CB,∴平行四边形DEF G为矩形。
坐标变换讲解

坐标变换讲解
坐标变换是指将一个坐标系中的点或向量转换到另一个坐标系中的过程。
在二维情况下,一般使用2x2的矩阵来表示坐标变换,而在三维情况下则使用3x3的矩阵。
在二维情况下,假设有两个坐标系A和B,坐标系A中的点P(x,y)需要转换到坐标系B中的点P'(x',y')。
坐标变换可以通过以下公式来实现:
[x'] = [a b] [x]
[y'] [c d] [y]
其中,a、b、c和d是转换矩阵的元素,它们定义了从坐标系A 到坐标系B的转换关系。
具体来说,a和d表示坐标轴的缩放因子,b和c表示坐标轴的旋转因子。
在三维情况下,坐标变换的方式稍有不同。
假设有两个坐标系A 和B,坐标系A中的点P(x,y,z)需要转换到坐标系B中的点P'(x',y',z')。
坐标变换可以通过以下公式来实现:
[x'] = [a b c] [x]
[y'] [d e f] [y]
[z'] [g h i] [z]
其中,a、b、c、d、e、f、g、h和i是转换矩阵的元素,它们定义了从坐标系A到坐标系B的转换关系。
具体来说,a、e和i表示坐标轴的缩放因子,b、c、d、f、g和h表示坐标轴的旋转和剪切因子。
需要注意的是,坐标变换不仅仅可以用矩阵表示,还可以使用四元数、欧拉角等方式进行表示。
此外,在实际应用中,坐标变换经常涉及到平移操作,可以通过引入齐次坐标进行处理。
总之,坐标变换是将一个坐标系中的点或向量转换到另一个坐标系中的过程,通过定义适当的转换矩阵或其他表示方式,可以实现不同坐标系之间的转换。
《计算流体力学》课程教学大纲(本科)

计算流体力学(Computational Fluid Dynamics)课程代码:02410028学分:2学时:32 (其中:课堂教学学时:32实验学时:0 上机学时:0 课程实践学时:0 )先修课程:微积分、线性代数、物理、流体力学等适用专业:能源与动力工程等专业教材:计算流体力学及应用;中国人民总装备部军事训练教材编辑工作委员会;国防工业出版社;2003年一、课程性质与课程目标(一)课程性质(需说明课程对人才培养方面的贡献)本课程是能源与动力工程(流体机械及工程)专业的一门主要的专业基础课。
本课程主要介绍流体力学问题的计算机数值计算方法,包括计算流体力学的数学基础、控制方程、离散化方法、有限差分法、单元与插值函数、流体力学典型问题的数值分析等。
使学生掌握计算流体力学的基础理论、方法和技能,为今后从事本专业的科学研究工作和工程技术工作打下基础。
(二)课程目标(根据课程特点和对毕业要求的贡献,确定课程目标。
应包括知识目标和能力目标。
)总目标在学习完本课程后,学生应该应掌握以下技能:(1)熟悉流动现象的微分方程和近似求解的数值方法,并且能设计数值解决方案,使用和开发流动模拟软件对工程和科学的领域中的重要流动现象进行模拟;(二)能够通过建立正确合理的数学模型,选择有效的计算方法进行流动模拟;(三)利用现有的最佳模型进行数值模拟,对模拟结果进行合理分析评价,为后续专业课的学习和将来从事科学研究和专业技术工作打下良好基础。
阶段目标.理解对于可压,不可压,粘性及无粘流体流动的基本流体力学控制方程的数学描述及数学特性。
1.对数值分析中稳定性,逼近和收敛性和代数方程组的数值解的概念和基本原则有深刻的理解。
2. 了解对于可压及不可压流体流动的数值模拟求解方法及在工程实践基础研究中的应用。
3.理解数值模拟的原理和技术,并且明白模拟的局限性。
4.通过商用CFD软件包(ANSYS或COMSOL),解决实际工程问题。
二、课程内容与教学要求(按章撰写)第一章计算流体力学的基本原理(2学时)(一)课程内容1.什么是计算流体力学.计算流体力学的工作步骤2.计算流体力学解决的问题.计算流体力学的应用领域(二)教学要求. 了解计算流体力学的相关基础知识。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一.网格生成
矩形网格下曲壁的差分
()()22,1,,1
11i j i j i j A
u u u u y
y
αααα+-+--∂=
∂+∆
形式变得十分复杂。
C
B
A
y
α∆y ∆,i j
,1
i j +矩形网格(
直壁
)
矩形网格(曲壁)
D
C A
B 贴体网格:网格线与物面边界重合。
构筑贴体网格的TTM 方法
TTM 方法的物理意义就是利用等温线构筑网格线。
222222
2200
x y x y ξξηη⎧∂∂+=⎪∂∂⎪
⎨∂∂⎪+=⎪∂∂⎩
或写成 00x x y y x x y y ξξηη+=
⎧⎪⎨
+=
⎪⎩ 我们要做的工作就是把等温线ξ和η的坐标点(),x y 找到。
实际上就是在上述方程中把(),x y 从自变量变换成因变量(函数),变换结果如下:
两个矩形域中的等温线
矩形域中两组等温线的叠加
等η线
等ξ线
20
20
ax bx cx ay by cy ξξξηηηξξξηηη-+=⎧⎪⎨
-+=⎪⎩ 式中,
2222 , , a x y b x x y y c x y ηηξηξηξξ=+=+=+
可以用五点格式求解上述方程
()()1,1
1,11,11,11,,1,2
,1,,1
2
2242 0
i j i j i j i j i j i j i j
i j i j i j x x x x x x x a
b
x x x c ξξη
η
++-++---+-+-----+-∆∆∆-++=∆
()()1,1
1,11,11,11,,1,2
,1,,1
2
2242 0
i j i j i j i j i j i j i j
i j i j i j y y y y y y y a
b
y y y c ξξη
η
++-++---+-+-----+-∆∆∆-++=∆
它们均为线性方程组,可以用迭代法(点迭代,线迭代,ADI 法和超松弛法)求解。
初始网格(椭圆网格生成方程所需要的初始代数网格点分布)
收敛网格(椭圆网格生成方程最终生成的网格)
)
构筑网格的基本要求
1.网格要足够光滑;(考察 , , , x x y y ξηξη或 , , , x y x y ξξηη随
ξη-的分布)
2.网格线在物理量密度大的地方能够加密; 3.网格最好与物面正交。
例如,绝热壁条件
0T
n
∂=∂ (n 为物面外法向) 也就是 0T η∇∇=
x y i j ηηη∇=+
式中,,i j 为直角坐标系的单位矢量。
温度梯度为:
()()
x x y y x y x y T T T T T T T i j i j
x y T T
i j i j ξηξηξηξηξξηηξη
⎛⎫⎛⎫
∂∂∂∂∂∂∇=+=+++ ⎪ ⎪∂∂∂∂∂∂⎝⎭⎝⎭∂∂=+++∂∂
于是 0T η∇∇=,成为:
()()()0x y x y x y T T i j i j i j ξξηηηηξη⎡⎤
∂∂++++=⎢⎥∂∂⎣⎦
即, ()()220x x y y x y T T ξηξηηηξη
∂∂+++=∂∂ 如果网格线与物面正交,就有
0 ξη∇∇=
即,
()()0x
y
x
y
i j i j ξξηη++=
也就是 0x x y y ξηξη+=, 于是绝热条件成为
0T
η
∂=∂
圆锥体的横截面网格
测度 , , , x y x y ξξηη在ξη-平面上的分布
ξη(a)(b)
(c)
(d)
ξ
η
ξ
η
ξ
η
y
ηx
ηy
ξx
ξ
椭圆网格生成方程所需要的初始代数网格点分布
椭圆网格生成方程最终生成的网格
测度 , , , x x y y ξηξη在ξη-平面上的分布
x ξξη
ξ
η
y ξ
x η
y η
ξ
ξ
η
η
(a)
(b)
(c)(d)
二.坐标变换
一般情况下,流场不可能是矩形,而我们又希望在矩形域中求解差分格式,所以必须进行坐标变换。
坐标变换:
()()
,,x y x y ξξηη=⎧⎪⎨=⎪⎩
x
y
A
D
C
B
物理域
η
ξ
A
D
B
C
计算域
设
η
∆
ξ∆ξη
i IM
=
j JM
=
1
j=
1
i=
均匀矩形网格计算域
21
1
x
y
H H
H x
L
ξ
η
=
⎧
⎪⎪
⎨=
-
⎪+
⎪⎩
y
x 1
H
2
H
L
物理域
j JM
=i IM
=1j =1
i =1
2
31j =1
i =12
3i IM
=j JM
=物 理 域
计 算 域
椭圆网格生成方程所需要的初始代数网格点分布
椭圆网格生成方程最终生成的网格
1
B 2
B 3
B 4
B C
C
A
A
ξ
η
C
3
B C
2
B 4
B A 1
B A
从尾迹处剪开,使流场成为单连域。
打开的双连域
计算域
2B 1
B C
3
B 4
B A
双连域的分割
多连域的代数网格点分布
由椭圆型偏微分方程组生成的网格
1
B 2B 3
B 4
B 5
B 6
B 7
B 8
B 2
B 3
B 4
B 1
B 5B 6B 7B 8
B 未展开的多连域
计算域
在计算域中,偏微分成为:
x x x x x x u u u u u u x ξηξηξηξηξηξη⎛⎫∂∂∂∂∂∂∂=+=+=+ ⎪∂∂∂∂∂∂∂⎝⎭
同理:
y y y y y y u u u u u u y ξηξηξηξηξηξη⎛⎫∂∂∂∂∂∂∂=+=+=+ ⎪∂∂∂∂∂∂∂⎝⎭
实际并不需要知道(),x y ξ和(),x y η的具体表达式,只需知道
, , , x y x y ξξηη就行了。
坐标变换:()()
,,x y x y ξξηη=⎧⎪⎨=⎪⎩
反变换:()()
,,x x y y ξηξη=⎧⎪⎨=⎪⎩
全微分:
x y x y x y x y d dx dy
d dx d dx dy
d dy ξξξξξξηηηηηη=+⎧⎡⎤⎡⎤⎡⎤⎪⇒=⎨⎢⎥⎢⎥⎢⎥=+⎪⎣⎦⎣⎦⎣⎦⎩ 同理:
dx x d x d x x dx d y y dy y d y d dy d ξηξηξηξηξη
ξξη
η=+⎧⎡⎤⎡⎤⎡⎤
⎪⇒=⎨
⎢⎥⎢⎥⎢⎥=+⎪⎣⎦⎣⎦
⎣⎦⎩ 比较两个全微分,可得
1
x y x y x x y
y ξ
ηξ
ηξξηη-⎡⎤⎡⎤
=⎢⎥⎢⎥⎣⎦⎣⎦
设 1
J x y x y ξηηξ
=
-,有
, , , x y x y Jy Jx Jy Jx ηηξξξξηη==-=-=
计算域中的Euler 方程
直角坐标系下(物理域)Euler 方程为:
0U F G
t x y
∂∂∂++=∂∂∂ 式中,
u U v e ρρρ⎡⎤
⎢⎥
⎢⎥=⎢⎥
⎢⎥
⎣⎦ ()2u u p F uv e p u ρρρ⎡⎤⎢⎥+⎢
⎥=⎢⎥⎢⎥+⎣⎦ ()2v uv G v p e p v ρρρ⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥+⎣⎦ 补充 ()221
12
p e u v ργ=
++- 如果在计算域中求解,就需把Euler 方程变换到计算域中去,设坐标变换为
()()
,,t x y x y τξξηη⎧=⎪
=⎨⎪
=⎩ 则,计算域中Euler 方程为
0U F G
τξη
∂∂∂++=∂∂∂ 式中,
1u U v J e ρρρ⎡⎤
⎢⎥⎢⎥=⎢⎥⎢⎥
⎣⎦ ()1x y U u U p F v U p
J e p U ρρξρξ⎡⎤⎢⎥+⎢⎥=⎢⎥+⎢⎥+⎣⎦
()1x y V uV p G vV p J e p V ρρηρη⎡⎤⎢⎥+⎢⎥=⎢⎥+⎢⎥+⎣⎦
式中
x y
x y
U u v V u v ξξηη⎧=+⎪⎨
=+⎪⎩ 称为逆变速度(Contravariant Velocity )
设物理速度为V ,则
V ui vj =+
式中,,i j 为直角坐标下的单位矢量,而
x y i j ξξξ∇=+ x y i j ηηη∇=+
于是逆变速度可写成
U V ξ=∇ V V η=∇
可见,逆变速度就是计算域中的速度,U 是物理速度在ξ∇方向上的投影,V 是物理速度在η∇方向上的投影。