CT有限角度算法的比较研究
CT稀疏角度图像投影重建的CQ算法研究

KE Y W OR DS : I ma g e r e c o n s t uc r t i o n ;S p l i t f e a s i b i l i t y p r o b l e m( S F P ) ; S p a r s e a n g u l a r ;B l o c k s u c c e s s i v e a l g o r i t h m
p h y s i c a l m e a n s .T h e n a b l o c k s u c c e s s i v e C Q a l g o i r t h m w a s p r o p o s e d .C o m b i n e d w i t h t h e S h e p p—L o g a n m o d e l a n d
t o i mp r o v e i t , a p p l y i n g C Q o r i t s mo d i i f e d a l g o i r t h m s c a n h a v e b e t t e r r e s u l t s .H o w e v e r , t h e r e e x i s t s l o w c o n v e r g e n c e
关键词 : 图像重建 ; 分裂可行 问题 ; 稀疏角度 ; 分块逐次算法
中 图分 类 号 : T P 3 0 1 . 6 文献标识码 : A
S p a r s e An g u l a r CT I ma g e P r o j e c t i o n Re c o n s t r u c t i 0 n
t h r o u g h s i mu l a t i o n s ,w e a n a l y s e d t h e c o n v e r g e n c e r a t e a n d r e c o n s t r u c t i o n p r e c i s i o n wi t h d i f f e r e n t c a s e s .T h e r e f o r e we h a v e e n s u e d t h a t c a s e 2 a n d i t s mo d i i f e d a l g o i r t h m c a n o b t a i n t h e b e s t r e c o n s t r u c t i o n s .
CT机X射线辐射剂量的影响因素及控制方法

CT机X射线辐射剂量的影响因素及控制方法CT在现代医学诊断领域中具有不可替代的地位,CT照射产生的辐射剂量已经引起大众和医疗界的极大关注。
不同的方法都可以提高CT射线的使用效率,减小射线的辐射量,同时不降低CT检查图像的分辨率。
该研究在这些方法的基础上,从临床实际的角度对他们进行总结和评述。
标签:CT;剂量;控制1 CT的理论基础CT-是计算机断层扫描成像技术的简称,其特点是可以在不破坏物体自身组成结构的条件下,依据从物体周围所获得的某些物理里量,比如X射线强度,电子束强度,波动速度等,应用相关的数字信号获取技术及处理放在,在一定的算法基础上,通过计算机内部的CPU和GPU对获得的数字信号进行物体特定的层面的图像重建,图像可以以二维及三维立体的表现形式出现。
CT成像技术的理论算法基础是数学家Radon于1917年提出的Radon变换理论。
Randon理论的基本原理就是对于已知入射角的投影函数能够重建出唯一的二维图像函数f(x,y)。
以此理论为基石,断层成像技术得到了迅速的发展首当其冲的应用到医疗诊断领域,当代医学诊断图像技术也得到了极大的发展。
随着CT技术与其他学科的不断融合,CT在物质检测方面的巨大优势使得其在工农业,地质勘探,安全工程等领域不断得到应用。
2 CT的结构组成CT机主要由三个主要部分组成,分别是:扫描部分,计算机处理部分,显示和存储部分。
X射线发射源,探测器、扫描支架组成了扫描部分。
计算机处理部分负责处理由扫描部分的得到的数字信号,然后进行数据的运算和存储,最后生成重建后的图像。
经重建后的CT图像通过存储设备存储到CT机中,并随时通过显示系统进行显示。
CT机成像的过程可以概括如下:利用X射线对扫描对象的某一特定部分某一厚度的层面进行扫描处理,穿过该物体的X射线被探测器所接受,通过内部变化转化为可见光信号,再由光电转换器转换为电信号,通过数字信号采用器将模拟电信号采样转化为数字信号,利用计算机处理得到的数字信号。
《稀疏角CT重建的算法研究》范文

《稀疏角CT重建的算法研究》篇一一、引言计算机断层扫描(Computed Tomography, CT)技术是现代医学影像诊断的重要手段之一。
然而,传统的CT重建算法在处理高噪声和低对比度的图像时常常面临挑战。
近年来,稀疏角CT 重建算法因其出色的噪声抑制和细节保留能力,逐渐成为研究热点。
本文将详细研究稀疏角CT重建的算法,分析其原理、特点及优劣,并通过实验验证其有效性。
二、稀疏角CT重建算法原理稀疏角CT重建算法是一种基于稀疏约束的优化算法,其核心思想是在重建过程中引入稀疏性约束,以增强图像的细节表现和噪声抑制能力。
该算法主要包括以下几个步骤:1. 数据采集:通过旋转X射线源和探测器,获取物体不同角度下的投影数据。
2. 图像重建:利用稀疏性约束,通过优化算法从投影数据中重建出物体内部的断层图像。
3. 迭代优化:通过迭代优化过程,逐步提高图像的分辨率和信噪比。
三、稀疏角CT重建算法特点及优劣分析1. 特点:(1)稀疏性约束:稀疏角CT重建算法通过引入稀疏性约束,使得重建图像在保持细节的同时,有效抑制噪声。
(2)高分辨率:该算法通过迭代优化过程,逐步提高图像的分辨率,使得重建图像更加清晰。
(3)稳定性好:该算法对不同噪声水平的图像具有较好的稳定性,能够在一定程度上提高图像的信噪比。
2. 优劣分析:(1)优点:稀疏角CT重建算法在处理高噪声和低对比度的图像时表现出色,能够有效提高图像的分辨率和信噪比。
同时,该算法具有较好的稳定性和鲁棒性,适用于各种复杂场景。
(2)缺点:该算法的计算复杂度较高,需要较长的计算时间。
此外,对于某些特殊结构或材料,可能存在重建误差。
四、实验验证为验证稀疏角CT重建算法的有效性,我们进行了以下实验:1. 数据准备:收集一组含有噪声和低对比度的CT图像数据。
2. 实验设计:分别采用传统CT重建算法和稀疏角CT重建算法对同一组数据进行处理。
3. 结果分析:对比两种算法处理后的图像质量,包括分辨率、信噪比等指标。
Kirchhoff积分叠前时间偏移全方位角度道集生成方法与实现
取汇聚后的波场值作为成像结果便实现了 K-PSTM。在时间域,(1)式可以表示为:
1 cos U
V
I r, t = 0 2
dA
RV
t
(x, t)
R
U(x, t) R t t0 V
(2)
其中:A 为地表处炮点和检波点的分布范围;θ是从成像点到一个接收点时地震波传播所沿 射线的出射角;V 为地震波传播速度,R 代表反射点到检波点时地震波所走过的距离;
要的全部共中心点地震数据。该地震数据对于
三维大规模工区,数据量级比较大,需要一定
数量的集群节点内存来分散存储,否则可能因
为内存不足而影响计算效率或无法计算。 在成像阶段,由于一次只对一条线进行成
像,即使分选到全方位角、反射角,成像体的
规模仍旧是可控的,也不会需求太大内存而造
成无法计算。在所有进程对某条线成像完成后,
PS
, psx , psy psz
TS x
,
TS y
,
TS z
(4)
PR
prx , pry , prz
TR x
,
TR ,
y
TR z
利用 PS 和 PR 可计算得到入射角γ和散射方位角φ:
2
=a
(5) (6)
=
arccos
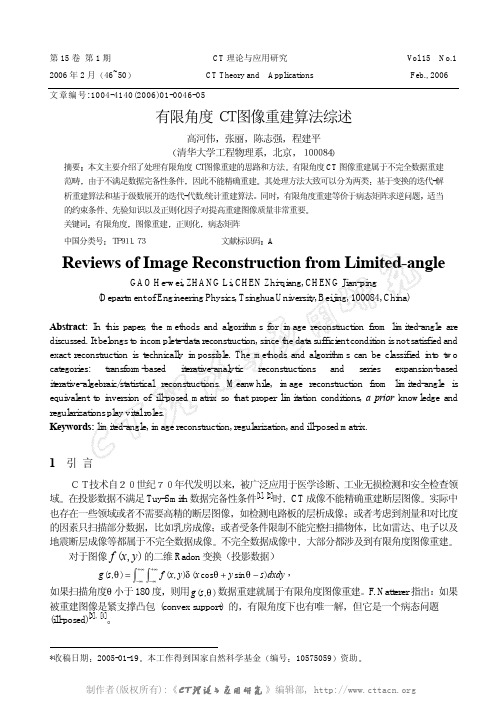
入射角γ(散射张角的一半)和散射方位角
图 1 散射点处地震波传播角度示意图
( 即 局部 入 射 与散 射 慢 度 所在 平 面 的方 位 Fig.1 Sketch of seismic wave transmission
角)。入射与散射慢度矢量和 PM 称为照明矢
angle at a scatter point
《大学计算机--计算思维视角》 CTchar02

24
计算理论 计算模型
2.2 计算理论
1995年度的图灵奖授予加州大学伯克利分校的计算机科学家 Manuel Blum,他是计算复杂性理论的主要奠基人之一。
Blum与前述两人互相独立地进行着相关问题的研究,并完成 了他的博士论文:A machine independent theory of the complexity of recursive functions (与机器无关的递归函数复杂性 理论),论文提出了有关计算复杂性的4个公理,被称为布卢姆公 理系统。目前,可计算理论的绝大部分结果都可以从这个公理系 统推导出来。
2.2 计算理论
4.可计算理论的意义
➢ 计算学科的一个基本结论是不可计算的函 数要比可计算的函数多得多。
➢ 虽然许多问题是可判定的,但更多的问题 是不可判定的。
➢ 例如:停机问题和波斯特对应问题都是不 可判定的。
17
计算理论 计算模型
2.2 计算理论
2.2.3 停机问题
停机问题是目前逻辑数学的焦点和第三次数 学危机的解决方案,它是重要的不可判定问题。
计算理论 计算模型
2.2 计算理论
4.可计算理论的意义
➢ 可计算性理论的基本思想、概念和方法被 广泛应用于计算科学的各个领域。
➢ 数学模型的建立方法在科学、工程、技术 领域中被广泛采用。
➢ 递归的思想被用于程序设计、数据结构和 计算机体系结构。
➢ λ演算被用于研究程序设计语言的语义。
16
计算理论 计算模型
1936年,Turing发表“论可计算数及 其在判定问题中的应用”论文中提出一般 性停机问题的不可判定性,并用形式化方 法证明其为一个不可计算问题。
一般性的停机问题:对于任意的图灵机和输入,是否存在 一个算法,用于判定图灵机在接收初始输入后可达停机状 态。若能找到这种算法,停机问题可解;否则不可解。
有限角度CT图像重建算法综述
(6 )
这也是代数/统计迭代重建解决有限角度问题的基本思路 因此 ART SIRT 和 PWLS 等代数迭代方 法[19]与 ME EM ML 以及 Bayesian 估计等优化准则[20] 以及基于图像平滑 边缘保持等的正则化 条件都可以应用到有限角度的图像重建中[21]
2.3 约束条件
除了一般意义的重建图像非负有界 重建图像区域有限 投影数据对称等一般意义的先验知识
的处理方法 待重建图像的一种估计可以表示为
f = A+ g = (AT A)−1 AT g.
(3 )
它是最小化 Af − g + f 的解 可以采用截断 SVD 来逼近 A+ 如果考虑奇异值太小时数值不
2
2
稳定 可以采用 Tikhonov-Phillips 方法[4]
A+ = (AT A + γ I)−1 AT = AT (AT A + γ I)−1.
2.2.1 矩阵求逆
若系统矩阵为A 待重建图像为 f 投影数据为 g 则
制作者(版权所有):《
》编辑部,
48
CT 理论与应用研究
15 卷
Af = g.
(2 )
直接求逆是有困难的 A 可能是不可逆 或者是病态的 广义逆(Penrose-Moore)是一个比较常用
代最终以(1− λi )n 的速度收敛到 fˆ
其中
{λi} 是CB 的特征值
并且0
<
λi
<
[13]
1
虽然理论上 GP 算法收敛 但是其收敛速度很慢 改进 GP 算法的收敛性是人们研究的重点
Salomon 在 2004 年提出了通过选择适当的正交投影来加快 GP 算法的收敛[14] 张兆田等在 2004 年
CT技术的发展,最详细!

CT技术的发展自从 Godfrey N Hounsfied发明 CT至今,CT技术应用到医学临床已有30余年的历史.从最早只能扫描头部到能用于全身各个部位检查,从单层非螺旋CT到多层螺旋 CT(T技术的发展突飞猛进,尤其是近十年来,更为迅速,平均每2—3年就有一个比较大的进展.本文仅就近10年来CT技术的发展做一回顾。
一、CT成像技术的发展CT的出现是传统X线摄影和计算机技术结合的结果,将影像检查技术带人一个新的划时代的阶段.CT应用到医学临床已有30多年的历史。
这期间CT的硬、软件技术经历了几次大的革命性进步,一次是1989年CT在传统旋转扫描的基础上,采用了滑环技术和连续进床扫描,滑环技术使扫描装置可顺一个方向作连续旋转,配以连续进床,扫描轨迹呈螺旋状,因而得名螺旋 CT(helical或spiral CT)。
另一次是 1998年多层螺旋CT的问世,使得机架球管围绕人体旋转一圈能同时获得多幅断面图像,开创了容积数据成像的新时代.这两次革命性的进步在CT发展史中成为重要的里程碑。
1998年多层螺旋CT问世后,CT的扫描技术和临床应用都呈现加速发展的态势,几乎每年都有一个新的多层螺旋CT产品出现,4层、6层、8层、10层、16层螺旋CT等等。
2003和2004年RSNA(北美放射年会)上,各个公司厂家又纷纷推出32、40、64层CT,成为目前CT 发展的焦点。
近十余年来,从非螺旋 CT到螺旋 CT、单层CT到多层CT,CT主要的硬件技术变化表现在其探测器、球管、计算机系统以及伪影校准算法的不断进步上。
1.探测器技术的发展最早的单层CT探测器覆盖宽度只有10mm,最薄物理采集层厚也只能达到10mm。
多层螺旋CT 采用了阵列探测器,每一单列的探测器采集层厚可达到亚毫米,阵列探测器的组合覆盖宽度最早达到20mm甚至32mm;而现在64排CT的覆盖宽度可达40mm,最薄物理采集层厚依据不同厂家可做到高分辨率的亚毫米层厚0.5或O.625mm。
第二节 CT图像

人体内密度不同的各种组织的 CT值一般位于-1000Hu~+1000Hu 的2000个分度之间(图3-1)。在 实际工作中可以用测CT值的方法, 大体估计组织器官的结构情况, 这样就有了一个简便的量化指标。 此外还可以根据CT值选择阈值进 行图像后处理,根据CT值进行实 时增强监视及骨密度测定等。但 是,CT值并不是恒定的,它受X 线管老化、电源状况、扫描参数、 温度及邻近组织等因素影响,因 此在诊断中CT值只能作为参考, 而不能作为诊断主要依据。
人体常用的 CT值
类别 水 脑脊液 血浆 水肿 脑白质 脑灰质 血液 血块 肝脏
CT值(Hu)
0±10
类别
脾脏 胰腺 肾脏 胆囊 脂肪 钙化 空气 肌肉 骨骼
CT值(Hu)
50~65或略低
3~8 3~14 7~17
25~32 30~40 13~32 64~84 50~70
45~55 40~50 10~30
• CT图像有较高的密度分辨力,其X线吸收系数的测 量精确度可达 0.5% ,能分辨密度差异较小的组织, 能清楚地显示人体某些器官的解剖结构和器官内密 度发生变化的病变组织。 • CT图像的数据采集后,可对其进行图像后处理。 尤其是螺旋扫描的容积数据,可改变算法,进行重 建。能对横断层面像进行多维、多平面的各种类型 的重组(reformation),从任意角度,全方位观察影 像,对病变的定位、定量、定性更准确。在重组图 像中,不同密度的组织可以用不同的伪彩色显示, 图像更生动。
• 2.CT值和灰阶 CT值(CT number)是简便的量 化指标。在研究CT图像时,人们关心各组织结 构内的密度差异,即相对密度。如果某一组织 发生病变其密度就会发生变化,这对CT诊断有 很大价值。但比较和计算各组织对X线的吸收 系数非常繁琐,于是亨氏(Hounsfield)把X线的 吸收系数换算成CT值,单位是Hu(Hounsfield unit)。亨氏定义水的CT值为OHu,其它不同 密度组织都与它进行比较。密度大于水的为正 值,如骨皮质CT值为+1000Hu;密度小于水 的为负值,如空气的CT值为-10OOHu。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a a t ey. dpi l v
An d
te hn
a p o i t p r x mae
r c n t ci n eos u r t o
Z E u nciLU io g X n , A ig i H NG Y a —a, I Z— n , UEYi T NG Ln -e l g j ( ot nvri, a u n0 0 5 ,hn ) N r U i st Ti a 3 0 1 i h e y y C a
o a ib e p t h i r p s d f v ra l i s p o o e .Va ib e p th s i l c n c n c r l i p r s a a a c a
cag sae dp n ig o h a e ojc mpo e te h n e h p ee dn n te t g t bet r ,i rv h
pat a, n te n ns n a i lrjc r shv en rc clmayoh r o —t dr s r a t i a ebe i a d p at e o e
p o o e . n r s o s o t i i a i n t e i e u a p r ls a r p s d I e p n e t h s st to , h r g lr s i c n u r a
(y)∑对于每一个象素, 通过考虑经过它的一条射线 来 修正其 所对应 的方程 ,从而 达到修 正该象 素 的 目的;而 S R 算法 中对于每一个象素,利 用经 过该象素 的所有射线 A T 的修正值来确定对这一个 象素的平均修 正值 ,用这一修正的
参 考 文 献
[] 1张维林 C 形臂 x 射线机运行和应用 技术 条件探讨[] J. 中国辐射 _ J J
生 . 0 . () 34 . 2 31 1: —4 0 2 4 [] al Wisn, B n , v bR r k ̄B n r S h ez a d 2K r ee t a hNNa a ,Dul , mn e, cu t, n K. a O.
法的 较研藏
郑 源 彩 刘 子 龙
化 技 术 在 显 示 器 或 其 他 介 质 上 显 示 出来 ,在 辅 助 医 生 诊
变换法 等 。在 C (o ueie mo rp y ̄建算 法 中, T c mp tr dt ga h ) z o
一
开 始 就 把 连 续 的 三 维 图 像 f xY z 离 散 化 。 整 个 图像 (, ,) 把
电邮 : ze g un a@s acm hn y a ci i . n o
改 进 , 其 重 建 图像 相 对 之 前 两种 算 法 更 为 清 晰 ,可 以 更 好 地 抑 制 图 像 的 边 缘 伪 影 , 图像 平 滑度 高 ,误 差 也 较 小 , 使 得 重 建 效 果 更 接 近 原 始 图像 。
[] 3黎晖.T迭代重建算法 的加速 方法研究[ . C D】 江苏 :东南人 学. 0 . 2 8 0 【] 4庄天戈.T原理与算法[ . C M] 上海: 上海 交通大学 出版社,9 2 19.
[] u i, I Ose, .adFtmiE, nieroa ai inb sd 5R dn L.. h rS,n ae , .No l a tl r t ae , n t v ao n ie rmo a a oi msJ, h s a 19 ,6 :2 92 8 os e vl l r h []P yi l g t c D, 9 2 0 5 —6 .
( 接2 上 O页 )
S ibefr nevnin l rcd rsJ, E rn at n nMe ia ut l o tre t a Po e ue[]E E Ta sci s dc l a I o I o o
I gn , 0 0 1 ( ) 3 14 3 ma ig 2 0 .9 5 : 9 — 0 .
表 示投影矩 阵 ( 规定 了象 素布 置与射 线的几 何结
构 , 就 能求 出 ,且 是稀 疏矩 阵 ) ; W—表 示 测 量 误 差 和 附加 噪 声 。 重 建过 程 是 根 据 一 个 测 量 矢 量 P估 计 ,估 计 是通 过要 求 和 W满 足 指 定 的最 优 准 则 来 进行 的 。
s a n n p e ,a d h v i h rt e a d s a e r s lt n I c n i g s e d n a e h g e i n p c e o u i . n m o
t spp r wo vr bept e cltjc r u c o sae h a e,t ai l i h h l a r et y fn t n r i a c i a o i
平 均 值 替 代 该象 素值 。
从 而 , 列 重 建 法 可转 化 为 离散 重 建 问题 : 对 于给 定 的 系 “
投影测量矢量 P,估计其 图像矢量 ” 。若离散重建 问题解 的
估 计 值 为 x , 则 记被 重 建 图像 的估 计 公 式 为 :
厂= j ∑x j — b
,
.
z 表 示 _ ,) 离 散 值 , 每 个 象 素 内部 (, ,) ) 厂 ( z的 且 Y z 为
b2
.
…
,
6 , 何 图 像 能 够 由其 线 性 组 合 表 示 。 』) 任 对 × ×
j
勰露辫
Re e h & 。e e 。 m s ae v p
下, R A T重 建 的 图 像 较 为 模 糊 , 缘 伪 影 也 较 为 严 重 ; AR 边 S T 作 为 A T的 改 进 ,其 重 建 效 果 较 A T好 ,但 还 是 不 很 理 想 , R R
图像 轮 廓 也 较 为 模 糊 ; T -AR 而 V S T作 为 S T的 更 进 一 步 的 AR
其中 , —表示一个三维矢量:
P —表 示测 量 矢 量 ;
—
以 g epL gn头部模 型为例 ,该物体大小为 2 6 26 2 6 hp o a 5x5x 5,
切 图 片 大 小 为 1 8 18 2 x 2 ,灰 度 级 别 为 0 2 5 对 3 0个 投 影  ̄5, 6
( 4 )
T -AR V S T算法则是在 S R A T算法 的基础上 ,引进总变差
( v)最 优 准 则 ,通 过 改 变 其 松 弛 因 子 , 运 用 数值 外 插 法 , T
使 得 该算 法 以更 快 的速 度 收 敛 。
然 而 , 实 际运 用 中 ,图像 矢 量 往往 不容 易直 接 得 到 , 在 而且 在 实 际 的 测量 中 ,测 量 误 差 不 可 避 免 ,噪 声 的 影 响 也不 可忽 视 。 因此 ,我 们 对 理 想 状 态 下 的 投 影 重建 问题 p A = x加
在 投 影数 据 缺 失 ,投 影 角 度 受 限的 情 况 下 ,常 采用 代 数
重 建 算 法 ( R ,但 AR 由于 其 运 行 速 度 较 慢 ,耗 费 时 间 A T) T 较 多 ,许 多研 究 者 将 其 进 行 改进 ,提 出 了联 合 代数 重 建 算 法 ( A T)及 T -AR SR V S T算 法 【等 ,从 而提 高 其运 行 速 度 ,改 5 1 善 其 图像 质 量 。其 中 ,
角度进行等 问距扫描 , 每个投影方 向的探测器个数为 1 8 。 2个 运用 AR T,S R A T及 T -A T算法在有 限角 9 。 VS R O的仿真实验
切 片如 图 1 示 。 所
三 、A T算法及其改进算法的 比较 R c形臂 x射 线机凭借其 高精度 的成像质 量及其使用 的方 便与安全性,得 到了医学界 的广泛应用 。但在实际的医学 临 床运用中,由于 C臂机 自身的特点所限,实验过程 中出现几
四 、 实验 结 果
入误差矢量 W,得到新 的投影重建公式:
P =Ax+W () 5
C形 臂 C T重建就是根据一系Y -维投影图像计算 出 目 0 标物体 的三维数据 ,能够 为我们提供感 兴趣 区域 的形状 、密
度 、强 度 等 _ 、准 确 的信 息 ,基 于 以上 分 析 ,本 仿 真 实 验 辛富
Ab t c :C— r X a c i e r i g u e mo e n sr t a a m r y ma h n s a e ben s d r a d mo e wi e y i d c l ci i fed r d l n me ia l c i l .As t e c a a t rsis o n h h r ce t f i c C— r ma h n s if r n e st au s a d s a e r o a m c i e ,d fe e t d n i v l e n h p s a e g t y
“ )寿 ) )+ = )
S T迭 代 公 式 为 : AR
( 6 )
( ,= j y ) z ∑x ,Z ,) b ,
常简记为:
式中, , Y ) 一厂 , z在第/ , 个象素内的 平均值, () 式 2通
“
寿 p ) 景 L
上 述 两 个 公 式 的 区 别 主 要 在 于 修 正 因 子 的选 取 问题 上 ,
W . e s lr En n e 3 D— c nsr to g rt m o Ar S s e s S is e , ha c - Re o t uc i n Al o ih f r C— m y t m
× × Y × × × X× × × × × × × Y × × ×
刘 子 龙 , 中 北 大 学 硕 士研 究 生 ,研 究 方 向 :信 号 处 理
薛迎 , 中 北 大 学 硕 士 研 究 生 , 研 究 方 向 :C T图 像 处 理