机原第3章测验
操作系统题目第3章
第三章处理机调度与死锁1、时间片轮转调度算法是为了()。
A、多个用户能及时干预系统B、使系统变得高效C、优先级较高的进程得到及时响应D、需要CPU时间最少的进程最先做2、()有利于CPU繁忙型的作业,而不利于I/O繁忙型的作业。
A、时间片轮转调度算法B、先来先服务调度算法C、短作业(进程)优先算法D、优先权调度算法3、下面有关选择进程调度算法的准则中不正确的是()。
A、尽快响应交互式用户的请求B、尽量提高处理器利用率C、尽可能提高系统吞吐量D、适当增长进程就绪队列的等待时间4、设有4个作业同时到达,每个作业的执行时间均为2h,它们的一台处理器上按单道式运行,则平均周转时间为()。
A、1hB、5hC、2.5hD、8h5、若每个作业只能建立一个进程,为了照顾短作业用户,应采用();为了照顾紧急作业用户,应采用();为了能实现人机交互,应采用();而能使短作业、长作业和交互作业用户都满意,应采用()。
A、FCFS调度算法B、短作业优先调度算法C、时间片轮转调度算法D、多级反馈队列调度算法E、剥夺式优先级调度算法6、()优先级是在创建进程时确定的,确定之后在整个运行期间不在改变。
A、先来先服务B、动态C、短作业D、静态7、现在有三个同时到达的作业J1、J2和J3,它们的执行时间分别是T1、T2、T3,且T1<T2<T3。
系统按单道方式运行且采用短作业优先调度算法,则平均周转时间是()A、T1+T2+T3 B、(3×T1+2×T2+T3)/3C、(T1+T2+T3)/3D、(T1+2×T2+3×T3)/38、设有三个作业,其运行时间分别是2h、5h、3h,假定它们同时达到,并在同一个处理器上以单道方式运行,则平均周转时间最小的执行顺序是()A、J1,J2,J3B、 J3 ,J2,J1C、J2,J1,J3D、 J1 ,J3 ,J29、采用时间片轮转调度算法分配CPU时,当处于运行状态的进程用完一个时间片后,它的状态是()状态。
机械原理判断题
机械原理判断题第2章机构的结构分析随堂自测选择题〔每题5分,共100分〕1、当机构的的原动件数目小于其自由度数时,该机构将〔〕确定的运动。
正确答案:CA。
有B。
没有C。
不完全有2、当机构的的原动件数目大于其自由度数时,该机构将〔〕。
正确答案:CA。
有确定的运动B。
没有确定的运动C。
最薄弱环节发生损坏3、在机构中,一些不影响机构运动传递的重复部分所带入的约束为〔〕。
正确答案:AA。
虚约束B。
局部自由度C。
复合铰链。
4、机构具有确定运动的条件是〔〕。
正确答案:CA。
机构自由度小于原动件数B。
机构自由度大于原动件数C。
机构自由度等于原动件数5、用一个平面低副联二个做平面运动的构件所形成的运动链共有〔〕个自由度。
正确答案:BA。
3B。
4C。
5D。
66。
杆组是自由度等于〔〕的运动链。
正确答案:AA。
0B。
17。
一般平面运动副所提供的约束为〔〕。
正确答案:DA。
1B。
2C。
3D。
1或2Ⅲ级机构,那么该机构应满足的必要充分条件是〔〕。
正确答案:DA。
含有一个自由度B。
至少含有一个基本杆组Ⅱ级杆组Ⅲ级杆组9。
机构中只有一个〔〕。
正确答案:DA。
闭式运动链B。
运动件C。
从动件D。
机架10。
具有确定运动的差动轮系中其原动件数目〔〕。
正确答案:AA。
至少应有2个B。
最多有2个C。
只有2个D。
不受限制11、机构作确定运动的基本条件是其自由度必须大于零。
〔〕正确答案:错对错12、任何机构都是自由度为零的基本杆组依次连接到原动件和机架上面构成的。
〔〕正确答案:对对错13、高副低代是为了对含有高副的平面机构进行分析和研究。
〔〕正确答案:对对错14、任何具有确定运动的机构的从动件系统的自由度都等于零。
〔〕正确答案:对对错15、在平面机构中一个高副将引入两个约束。
〔〕正确答案:错对错16。
当机构的自由度F>0,且等于原动件数,则该机构即具有确定的相对运动。
〔〕正确答案:对对错17。
运动链要成为机构,必须使运动链中原动件数目等于其自由度数。
机械原理(西工大第七版)习题册答案1——7章
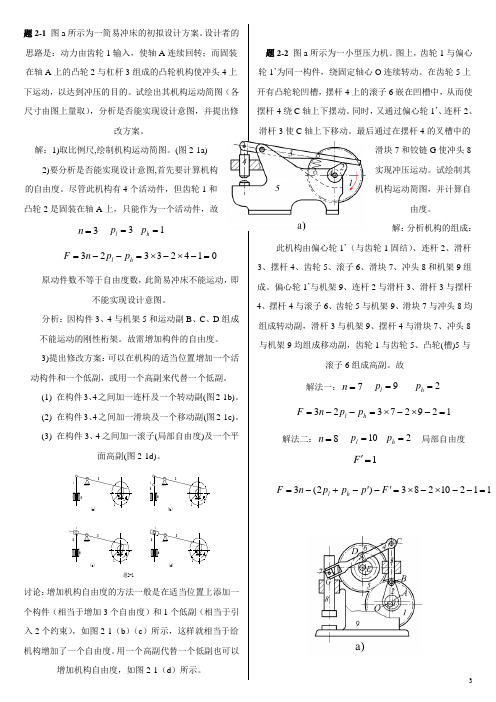
题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
微机原理第三章课后习题解答
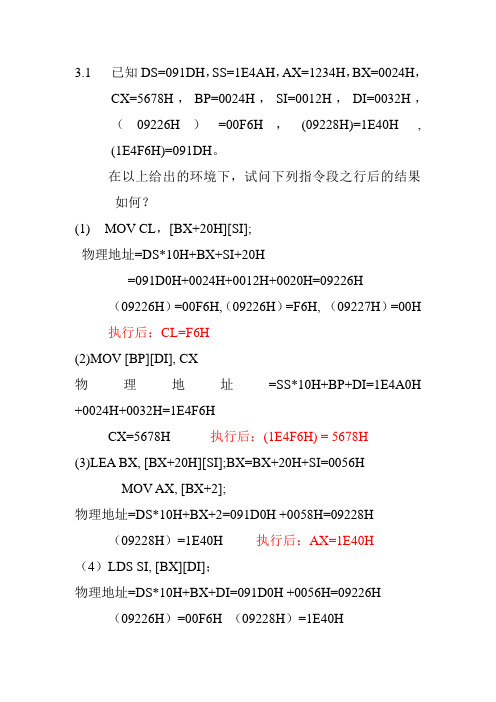
3.1已知DS=091DH,SS=1E4AH,AX=1234H,BX=0024H,CX=5678H,BP=0024H,SI=0012H,DI=0032H,(09226H)=00F6H,(09228H)=1E40H ,(1E4F6H)=091DH。
在以上给出的环境下,试问下列指令段之行后的结果如何?(1)MOV CL,[BX+20H][SI];物理地址=DS*10H+BX+SI+20H=091D0H+0024H+0012H+0020H=09226H(09226H)=00F6H,(09226H)=F6H, (09227H)=00H执行后:CL=F6H(2)MOV [BP][DI], CX物理地址=SS*10H+BP+DI=1E4A0H +0024H+0032H=1E4F6HCX=5678H 执行后:(1E4F6H) = 5678H(3)LEA BX, [BX+20H][SI];BX=BX+20H+SI=0056HMOV AX, [BX+2];物理地址=DS*10H+BX+2=091D0H +0058H=09228H (09228H)=1E40H 执行后:AX=1E40H(4)LDS SI, [BX][DI];物理地址=DS*10H+BX+DI=091D0H +0056H=09226H (09226H)=00F6H (09228H)=1E40H执行后:BX=(09226H)=00F6HDS=(09228H)=1E40HMOV [SI],BX物理地址=DS*10H+SI =1E400H +0012H=1E412HBX=0024H, 执行后:(1E412H)=0024H (5)XCHG CX,[BX+32H]物理地址=DS*10H+BX+32H =091D0H +0056H =09226H (09226H)=00F6H , CX=5678H执行后:(09226H)=5678H , CX=00F6HXCHG [BX+20H][SI], AX物理地址=DS*10H+BX+20H+SI =091D0H +0056H =09226H (09226H)=5678H , AX=1234H执行后:(09226H)=1234H , CX=5678H3.2设DS=1000H,SS=2000H,AX=1A2BH,BX=1200H,CX=339AH,BP=1200H,SP=1350H,SI=1354H,(11350H)=0A5H,(11351H)=3CH,(11352H)=0FFH,(11353H)=26H,(11354H)=52H,(11355H)=0E7H,(126A4H)=9DH,(126A5H)=16H,(21350H)=88H,(21351H)=51H。
(完整版)计算机组成原理第3章习题参考答案
第3章习题参考答案1、设有一个具有20位地址和32位字长的存储器,问(1) 该存储器能存储多少字节的信息?(2) 如果存储器由512K ×8位SRAM 芯片组成,需要多少片?(3) 需要多少位地址作芯片选择?解:(1) 该存储器能存储:字节4M 832220=⨯(2) 需要片8823228512322192020=⨯⨯=⨯⨯K (3) 用512K ⨯8位的芯片构成字长为32位的存储器,则需要每4片为一组进行字长的位数扩展,然后再由2组进行存储器容量的扩展。
所以只需一位最高位地址进行芯片选择。
2、已知某64位机主存采用半导体存储器,其地址码为26位,若使用4M ×8位的DRAM 芯片组成该机所允许的最大主存空间,并选用内存条结构形式,问;(1) 若每个内存条为16M ×64位,共需几个内存条?(2) 每个内存条内共有多少DRAM 芯片?(3) 主存共需多少DRAM 芯片? CPU 如何选择各内存条?解:(1) 共需内存条条4641664226=⨯⨯M (2) 每个内存条内共有个芯片32846416=⨯⨯M M (3) 主存共需多少个RAM 芯片, 共有4个内存条,1288464648464226=⨯⨯=⨯⨯M M M 故CPU 选择内存条用最高两位地址A 24和A 25通过2:4译码器实现;其余的24根地址线用于内存条内部单元的选择。
3、用16K ×8位的DRAM 芯片构成64K ×32位存储器,要求:(1) 画出该存储器的组成逻辑框图。
(2) 设存储器读/写周期为0.5μS ,CPU 在1μS 内至少要访问一次。
试问采用哪种刷新方式比较合理?两次刷新的最大时间间隔是多少?对全部存储单元刷新一遍所需的实际刷新时间是多少?解:(1) 用16K ×8位的DRAM 芯片构成64K ×32位存储器,需要用个芯片,其中每4片为一组构成16K ×32位——进行字长位16448163264=⨯=⨯⨯K K数扩展(一组内的4个芯片只有数据信号线不互连——分别接D0~D 7、D 8~D 15、D 16~D 23和D 24~D 31,其余同名引脚互连),需要低14位地址(A 0~A 13)作为模块内各个芯片的内部单元地址——分成行、列地址两次由A 0~A 6引脚输入;然后再由4组进行存储器容量扩展,用高两位地址A 14、A 15通过2:4译码器实现4组中选择一组。
微机原理与接口技术 第三章 课后答案
第三章参考答案1.按照题目中提出的要求,写出能达到要求的一条(或几条)汇编形式的指令:⑴将一个立即数送入寄存器BX;⑵将一个立即数送入段寄存器DS;⑶将变址寄存器DI的内容送入一个存储单元中;⑷从存储单元中取一个数送到段寄存器ES中;⑸将立即数0ABH与AL相加,结果送回AL中;⑹把BX与CX寄存器内容相加,结果送入BX;⑺用寄存器间接寻址方式,实现一个立即数与存储单元内容相加,结果放回存储器。
解:(1)MOV BX, 1234H(2)MOV AX, 1234HMOV DS, AX(3)MOV [BX], DI(4)MOV ES,[BX](5)ADD AL,0ABH(6)ADD BX,CX(7)MOV AX,[BX]ADD AX,1234HMOV [BX],AX2.执行下面程序,完成指令后的填空:MOV AX,2000H ;AH= 20HMOV DS,AX ;AL= 00H DS= 2000HMOV SS,AX ;SS= 2000H AX= 2000HMOV BX,2030H ;BH= 20H BL= 30HMOV SI,BX ;SI= 2030HMOV DI,3040H ;DI= 3040HMOV SI,DI ;SI= 3040HMOV SP,50FFH ;SP= 50FFHMOV DX,SP ;DH= 50H DL= FFHMOV CL,25 ;CL= 19HMOV BL,CL ;CL= 19H BL= 19HMOV AH,0F0H ;AH= F0HMOV CH,AH ;CH= F0HMOV BYTE PTR[DI],64 ;(DI)= 40HMOV WORD PTR[SI],256 ;(SI)= 00H (SI+1)= 01HMOV DL,[SI+1] ;DL= 01HMOV DH,1+[SI] ;DH= 00HMOV AL,1[SI] ;AL= 01HMOV WORD PTR[BX][SI],34 ;(BX+SI)= 22H (BX+SI+1)= 00HMOV [BX+SI+4],BL ;(BX+SI+4)= 19HMOV BP,2[BX+DI] ;BP= 00HMOV [BP],AL ;(BP)= 01HMOV AX,[BP][DI] ;AX= 0100HMOV BL,AL ;BL= 00HMOV ES,BX ;ES= 2000HPUSH BX ;SP= 50FDH (SP,SP+1)= 2000HPUSH DI ;SP= 50FBH (SP,SP+1)= F019HPOP CX ;SP= 50FDH CX= 3040HPOP DX ;SP= 50FFH DX= 2000HXCHG AX,BP ;AX= 0000H BP= 0100HXCHG DH,BL ;DH= 00H BL= 20HLAHF ;FLAG= 0002H AH= 02HSAHF ;FLAG= 0002H AH= 02HPUSHF ;SP= 50FDH (SP,SP+1)= 0002HPOPF ;SP= 50FFH FLAG= 0002H3.设DS=2000H,ES=2100H,SS=1500H,SI=00A0H。
机械制造基础第三章习题及答案
第三章习题与答案3-1铸造生产具有哪些优点和缺点?答:由于铸造成形是由液态凝结成固态的过程,故铸造生产具有以下特点。
1)成形方便铸造成形方法对工件的尺寸形状几乎没有任何限制,铸件的尺寸可大可小,可获得形状复杂的机械零件。
因此,形状复杂或大型机械零件一般采用铸造方法初步成形。
在各种批量的生产中,铸造都是重要的成形方法。
2)适应性强铸件的材料可以是各种金属材料,也可以是高分子材料和陶瓷材料。
3)成本较低由于铸造成形方便,铸件毛坯与零件形状相近,能节省金属材料和切削加工工时;铸造原材料来源广泛,可以利用废料、废件等,节约国家资源;铸造设备通常比较简单,价格低廉。
因此,铸件的成本较低。
4)铸件的组织性能较差一般条件下,铸件晶粒粗大(铸态组织),化学成分不均,因此,受力不大或承受静载荷的机械零件,如箱体、床身、支架等常用铸件毛坯。
3-2金属的铸造性能包括哪些方面?答:金属在铸造过程中所表现出来的性能统称为金属的铸造性能,主要是指流动性、收缩性、偏析和吸气性等。
3-3试述砂型铸造的工艺过程。
答:根据零件图的形状和尺寸,设计制造模样和芯盒;制备型砂和芯砂;用模样制造砂型;用芯盒制造型芯;把烘干的型芯装入砂型并合型;熔炼合金并将金属液浇入铸型;凝固后落砂、清理;检验合格便获得铸件。
3-4为了保证铸件质量,在设计和制造模样及芯盒时应注意哪些问题?答:1)选择分型面:分型面是铸型组之间的接合面,一般情况下,也就是模样的分模面。
选择分型面时,应考虑铸件上的主要工作面、大平面、整个铸件的加工基准面等的合理安置。
例如铸件的主要工作面应放在下型或朝下、朝侧面。
因为铸造时,铸件上表面容易产生气孔、夹渣等缺陷,而铸件下面的质量较好。
2)起模斜度:为了使模样容易从铸型中取出或型芯自芯盒脱出,在平行于起模方向的模样上或芯盒壁上应有一定的斜度,一般模样斜度为1°~3°,金属模样斜度为0.5°~1°。
(完整版)计算机操作系统(第四版)课后习题答案第三章

第三章处理机调度与死锁1,高级调度与低级调度的主要任务是什么?为什么要引入中级调度?【解】(1)高级调度主要任务是用于决定把外存上处于后备队列中的那些作业调入内存,并为它们创建进程,分配必要的资源,然后再将新创建的进程排在就绪队列上,准备执行。
(2)低级调度主要任务是决定就绪队列中的哪个进程将获得处理机,然后由分派程序执行把处理机分配给该进程的操作。
(3)引入中级调度的主要目的是为了提高内存的利用率和系统吞吐量。
为此,应使那些暂时不能运行的进程不再占用宝贵的内存空间,而将它们调至外存上去等待,称此时的进程状态为就绪驻外存状态或挂起状态。
当这些进程重又具备运行条件,且内存又稍有空闲时,由中级调度决定,将外存上的那些重又具备运行条件的就绪进程重新调入内存,并修改其状态为就绪状态,挂在就绪队列上,等待进程调度。
3、何谓作业、作业步和作业流?【解】作业包含通常的程序和数据,还配有作业说明书。
系统根据该说明书对程序的运行进行控制。
批处理系统中是以作业为基本单位从外存调入内存。
作业步是指每个作业运行期间都必须经过若干个相对独立相互关联的顺序加工的步骤。
作业流是指若干个作业进入系统后依次存放在外存上形成的输入作业流;在操作系统的控制下,逐个作业进程处理,于是形成了处理作业流。
4、在什么情冴下需要使用作业控制块JCB?其中包含了哪些内容?【解】每当作业进入系统时,系统便为每个作业建立一个作业控制块JCB,根据作业类型将它插入到相应的后备队列中。
JCB 包含的内容通常有:1) 作业标识2)用户名称3)用户账户4)作业类型(CPU 繁忙型、I/O芳名型、批量型、终端型)5)作业状态6)调度信息(优先级、作业已运行)7)资源要求8)进入系统时间9) 开始处理时间10) 作业完成时间11) 作业退出时间12) 资源使用情况等5.在作业调度中应如何确定接纳多少个作业和接纳哪些作业?【解】作业调度每次接纳进入内存的作业数,取决于多道程序度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 三、简答题(本大题有5个小题,每小题6分,共30分)
• 1. 机构运动分析包括哪些内容?对机构进行 运动分析的目的是什么? • 2. 在进行机构运动分析时,速度瞬心法的优 点及局限是什么? • 3.什么叫速度瞬心?什么叫相对速度瞬心和 绝对速度瞬心? • 4.用矢量方程图解法进行机构速度分析的步 骤有哪些? • 5.速度多边形和加速度多边形有哪些特性?
四. 综合题
(每小题10分,共40分)
1.图示为机构 的速度图和加 速度图。试根 据该图写出速 度VB2和加速度 aB2的矢量方程。 并在矢量图上 标出各个量。
2. 图示正弦机构,曲柄1长度L1=50 mm,角速ω1=20rad/s, (1)正确标出该机构的所有瞬心; (2)利用瞬心法确定该机构在φ1=45°时导杆3的速度v3。
机械原理第3章测验
一、判断题(每一小题2分,共10分)
1. 相对速度瞬心就是两构件绝对速度为零的瞬时重 合点。 ( ) • 2、速度瞬心就是两构件绝对速度相等而相对速度为 零的瞬时重合点。( ) • 3. 作平面运动的三个构件有三个瞬心,且位于同一 直线上。 ( ) • 4、速度影像和加速度影像只适用于构件的运动分析, 而不适用于整个机构。( ) • 5、在速度多边形中,由极点向外放射的矢量代表了 构件上相应点的绝对速度。( )
3. 在图示机构中,已知VB,欲求VE,试按 矢量方程图解法作出速度多边形 。
D E
4.按照图示曲柄导杆机构的运动简图及速度多边形,
试写出科氏加速度的表达式,并在图中指出其方向.
A
1 B
2
b1, b2
p 3 b3
比例尺 比例尺
C
二、填充题(每小题4分,共20分)
• 1、速度瞬心是两构件上——速度为零的瞬时重合点。 如果瞬心点的绝对速度为零,则称该瞬心为——。 • 2.在机构运动分析矢量图解法中,由极点向外放射的 矢量代表构件上相应点的——运动,而没有与极点连 接的矢量代表构件上相应两点间的——运动 。 • 3. 铰链五杆机构共有——个瞬心,其中绝对瞬心 个,相对瞬心——。 • 4.若2、3两构件牵连转动角速度为 2 ,在B点处的相 对移动速度为vB 3 B 2 ,则构件间产生的科氏加速度大小 可表示为————,方向为————。