S7 Graph 入门
(完整word版)S7 GRAPH指令
“Stop Sequencer”
停止程序控制并重新激活(在自动模式下比较有用)功能不如HALT_TM强大
HALT_TM
MOP.TMS_HALT
“Stop timers”
停止所有步的激活运行时间和块运行和重新激活临街时间,这个功能会停止步激活并且停止时间计数。
顺序控制器(S7-GRAPH名称)
含义
INIT_SQ
MOP.INIT
“Initialize”
激活初始步(顺控器复位)当步运行时置1时会从顺控器初始步重新运行,
OFF_SQ
MOP.OFF
“Disable”
停止顺控器,例如使所有步失效。
SW_AUTO
MOP。AUTO
“Automatic(Auto)"
模式选择:自动模式,在自动模式步续自动运行。
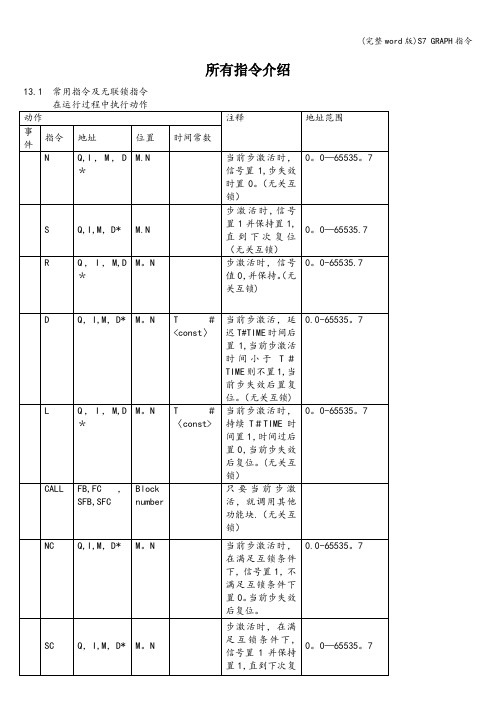
M。N
步激活时,信号值0,并保持。(无关互锁)
0。0-65535.7
D
Q,I,M,D*
M。N
T#<const〉
当前步激活,延迟T#TIME时间后置1,当前步激活时间小于T#TIME则不置1,当前步失效后置复位。(无关互锁)
0.0-65535。7
L
Q,I,M,D*
M。N
T#〈const>
当前步激活时,持续T#TIME时间置1,时间过后置0,当前步失效后复位。(无关互锁)
SW_MAN
MOP.MAN
“Manual mode(MAN)”
模式选择:手动模式,手动模式可以手动设定运行步续号
SW_TAP
MOP。TAP
“Inching mode(TAP)”
模式选择:单步模式,步续运行为单步,手动运行每一步
01、西门子S7-300PLC GRAPH顺控指令讲解和编程举例

4/22
工艺要求
简介 安装与使用 软件兼容性 应用举例 建立程序 编程界面 程序结构 编辑程序 应用设定 调试程序 程序演示 液位 C 液位 B 原 料 A 原 料 B 原 料 C
液位 A
阀门D
简单工艺描述: 初始化 打开阀门A,当液体 A 到达限位A 时,关闭阀门A, 打开阀门B,当液体 B到达限位B 时,关闭阀门B, 启动搅拌电机,5分钟后关闭搅拌电机, 如果附加工艺选择为“0” : 则打开阀门D,流程结束。 如果附加工艺选择为“1”: 则打开阀门C,当液体 C到达限位C 时,关闭阀门C, 启动搅拌电机,10分钟后关闭搅拌电机, 打开阀门D,流程结束。
软件版本与STEP7及操作系统之间的兼容性
简介 安装与使用 软件兼容性 应用举例 建立程序 编程界面 程序结构 编辑程序 应用设定 调试程序 程序演示
不同S7-GRAPH 软件版本与STEP7及操作系统之间的兼容性: X 表示兼容,- 表示不兼容
1)仅仅S7-GRAPH V5.3+SP1 或以后版本支持
手动控制输入及外界参数的变化 使用S7- PLCSIM调试程序 模拟故障情况发生
21/22
Thank you programming language S7-GRAPH
到达限位C
否
是 关闭阀门C
启动搅拌电机 10分钟 关闭搅拌电机
6/22
建立项目程序及功能块
简介 安装与使用 软件兼容性 应用举例 建立程序 编程界面 程序结构 编辑程序 应用设定 调试程序 程序演示
7/22
选择语言类型
简介 安装与使用 软件兼容性 应用举例 建立程序 编程界面 程序结构 编辑程序 应用设定 调试程序 程序演示
西门子培训课程graph练习及实验ppt课件
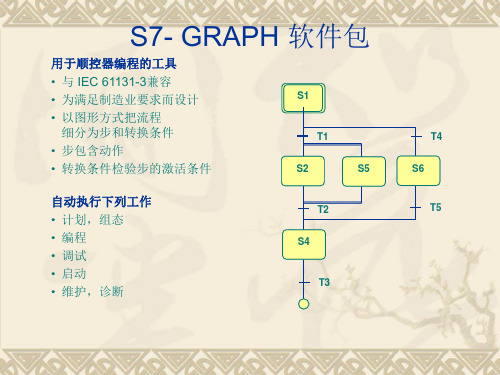
步1
S1
步1
动作
动作
T1 转换条件 1
步2
S2
步2
动作
动作
T2 转换条件 2
认识到了贫困户贫困的根本原因,才 能开始 对症下 药,然 后药到 病除。 近年来 国家对 扶贫工 作高度 重视, 已经展 开了“ 精准扶 贫”项 目
初始步
顺控器 1 S1
转换
T1 S2
顺控器元素
T6
S5T#4MS
总是与事件关联。
在发生事件的扫描循环中 引发执行一次动作
也可以与联锁条件C组合
计数器
• CS = 设置计数 • CU =增计数 • CD =减计数 • CR = 复位计数
定时器
• TL = 扩展脉冲 • TD = 延时开 • TR = 复位时间
认识到了贫困户贫困的根本原因,才 能开始 对症下 药,然 后药到 病除。 近年来 国家对 扶贫工 作高度 重视, 已经展 开了“ 精准扶 贫”项 目
认识到了贫困户贫困的根本原因,才 能开始 对症下 药,然 后药到 病除。 近年来 国家对 扶贫工 作高度 重视, 已经展 开了“ 精准扶 贫”项 目
编程题
有一工业用洗衣机,控制要求如下: ①按起动按钮后给水阀就开始给水→当水满传感器动作时 就停止给水→波轮正转5s,再反转5s,然后再正转5s如此反 复转动5分钟→出水阀开始出水→出水10s后停止出水, 同时声光报警器报警,叫工作人员来取衣服。 ②按停止按钮声光报警器停止,并结束工作过程。 要求:分配I/O口,设计梯形图。
S1 S tart
S2
= Q4.0
= Q4.5 T1
T1 20s
S3
= Q4.0
S7 GRAPH的编程与应用(实例).ppt
下面结合交通信号灯控制系统,介绍如何用S7 GRAPH编 辑顺序功能图。
三、S7 GRAPH编程
1.创建S7项目
打开SIMATIC Manager,然后执行菜单命令【File】→ 【New】创建一个项目,并命名为“信号灯Graph”。
三、S7 GRAPH编程
(1)设置S7 GRAPH功能块的参数集
在S7 GRAPH编辑
器中执行菜单命令
【Option】→
【Block Setting】,
打开S7 GRAPH功能
块参数设置对话框,本
例将FB设置为标准参
数集。其他采用默认值,
设
置
完毕保存FB1。
三、S7 GRAPH编程
(2)调用S7 GRAPH功能块
三、S7 GRAPH编程
(3) 转换条件编辑工具栏
梯形图分支闭合 插入梯形图分支 插入比较指令 插入常闭指令触点 插入常开指令触点
三、S7 GRAPH编程
(4) 浏览窗口
图形选项卡
顺控器选项卡
变量选项卡
三、S7 GRAPH编程
(5) 步与步的动作命令
转换条件梯形图
步序 步名
转换编号 转换名
动作命令框 命令区 操作数地址区
红
三、S7 GRAPH编程
(3) 动作的编辑 ①用鼠标点击S2的动作框线, 然后点击动作行工具,插入3个 动作行;在第3个动作行中输入 命令“D”回车,第2行的右栏 自动变为2行,在第1行内输入 位地址,如M0.0,然后回车; 在第2行内输入输入时间常数, 如T#20S(表示延时 20s),然后回车。 ②按照同样的方法,完成 S3~S5的命令输入。
S7 Graph 的学习心得

S7 Graph 的学习心得
关于Graph 中常用的命令
(1)命令S;当步为活动步时,使输出置位为 1 状态并保持。
(2)命令R:当步为活动步时,使输出复位为0 状态并保持。
(3)命令N:当步为活动步时,输出被置为1;该步变为不活动
步时,输出被复位为0。
(4)命令L:用来产生宽度受限的脉冲,相当于脉冲定时器。
(5)命令CALL:用来调用块,当该步为活动步时,调用命令中
指定的块。
(6)命令D:使某一动作的执行延时,延时时间在该命令右下方
的方框中设置。
在"直接"模式用鼠标右键点击动作框,在弹出的菜单中选择插
入动作行。
这种编程的重点就是要能够认清楚监控和互锁条件的区别与应用,如果能够准确的认识和掌握,其实这样的顺序编程也就会了一大半了,没有什么困难的。
顺序控制器中的条件
1.转换条件
2.互锁条件:如果互锁条件的逻辑满足,受互锁控制的动作
被执行。
3.监控条件:如果监控条件的逻辑运算满足,表示有干扰事件
V1 发生。
顺序控制器不会转换到下一步,保持当前步为活动步。
如果监控条件的逻辑运算不满足,表示没有干扰,如果转换条件满足,转换到下一步。
只有活动步被监控。
动作的分类:
∙标准动作
o与interlock 有关或者是无关
∙基于事件的动作
o o 与interlock 有关或者是无关与步的激活与非激活有关
∙计数器,定时器以及算术指令的动作。
WinCC -Step 7-Graph 的使用步骤:
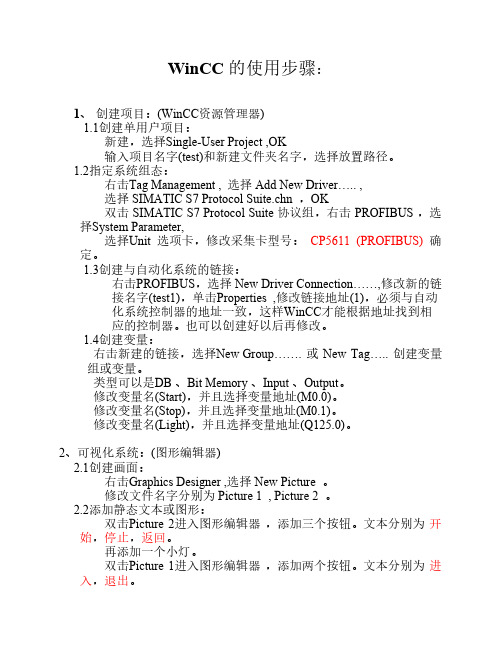
WinCC 的使用步骤:1、创建项目:(WinCC资源管理器)1.1创建单用户项目:新建,选择Single-User Project ,OK输入项目名字(test)和新建文件夹名字,选择放置路径。
1.2指定系统组态:右击Tag Management , 选择 Add New Driver….. ,选择 SIMATIC S7 Protocol Suite.chn ,OK双击 SIMATIC S7 Protocol Suite 协议组,右击 PROFIBUS ,选择System Parameter,选择Unit 选项卡,修改采集卡型号:CP5611 (PROFIBUS) 确定。
1.3创建与自动化系统的链接:右击PROFIBUS,选择 New Driver Connection……,修改新的链接名字(test1),单击Properties ,修改链接地址(1),必须与自动化系统控制器的地址一致,这样WinCC才能根据地址找到相应的控制器。
也可以创建好以后再修改。
1.4创建变量:右击新建的链接,选择New Group……. 或New Tag….. 创建变量组或变量。
类型可以是DB 、Bit Memory 、Input 、Output。
修改变量名(Start),并且选择变量地址(M0.0)。
修改变量名(Stop),并且选择变量地址(M0.1)。
修改变量名(Light),并且选择变量地址(Q125.0)。
2、可视化系统:(图形编辑器)2.1创建画面:右击Graphics Designer ,选择 New Picture 。
修改文件名字分别为 Picture 1 , Picture 2 。
2.2添加静态文本或图形:双击Picture 2进入图形编辑器,添加三个按钮。
文本分别为开始,停止,返回。
再添加一个小灯。
双击Picture 1进入图形编辑器,添加两个按钮。
文本分别为进入,退出。
2.3使用变量链接画面元素:在Picture 1 中,双击进入按钮,打开按钮属性窗口。
S7-GRAPH编程示例
5. 在OB 100 里建立初始化程序如下
6. 建立公用程序FC1
7. 建立手动程序FC2Biblioteka 8. 建立回原点程序FC3
9. OB1调用 FC1 FC2 FC4
OB1调用 FB0
FB接口参数意义:
FB接口参数意义: INT_SQ:=1,激活初始步,复位顺序控制器 OFF_SQ:=1,复位顺序控制器,所有步变成不活动步 ACK_EF:=1,确认错误和故障,强制到下一步。 SW_AUTO:=1,切换到单周期模式
ON:变为活动步(S_ALL 所有步) OFF:变为步活动步(S_ALL 所有步) 命令后加C:当前步活动时,并互锁条件满足时执行 二,动作事件
三,动作中的计数器 CS:初始值装入计数器 CU:计数值+1 CU:计数值-1 CU:计数值复位为0
四,动作中的定时器
TD:延时定时器 TL:脉冲定时器 TR:定时器复位
S7-GRAPH编程示例
机械手工作过程
1. 在STEP7中插入GRAPH source 2. 在SGRAPH source输入以下程序
设置步属性,设置初始化步
插入步动作:在步上单击鼠标右键,选择要插入的指令
一,命令 S:当前步活动时,输出置1,并保持 R:当前步活动时,输出置0,并保持 N:当前步活动时,输出置1,当前步不活动时,输出置0 D:当前步活动时,产生延时。 L:当前步活动时,产生定时脉冲。 CALL:当前步活动时,调用块
SW_TAP:=1,切换到单步模式
T_PUSH:=上升沿,转换实现
10. 程序下载
11. 顺控程序调试 打开顺控程序,
五,动作中的算术运算 A:=B A:=函数(B)
六,顺控制中条件
转换条件: 互锁条件:条件满足,受互锁控制的动作执行 监控条件:条件满足,受表示有干扰发生,顺控制不会转换 到下一步。
s7.docgraph.doc入门
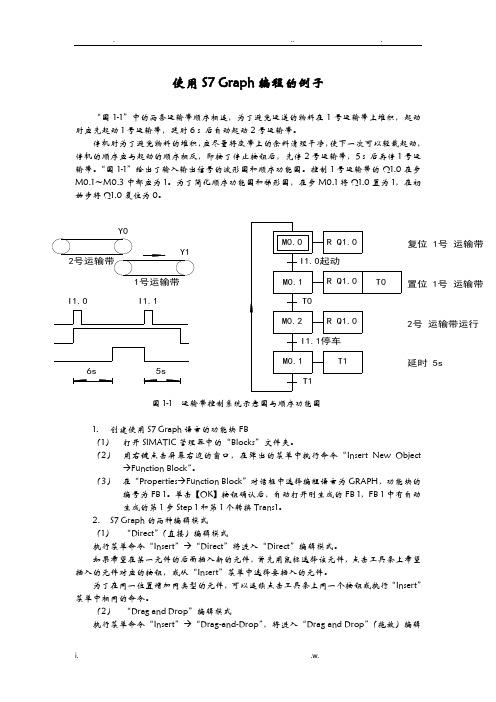
使用S7 Graph 编程的例子“图1-1”中的两条运输带顺序相连,为了避免运送的物料在1号运输带上堆积,起动时应先起动1号运输带,延时6 s 后自动起动2号运输带。
停机时为了避免物料的堆积,应尽量将皮带上的余料清理干净,使下一次可以轻载起动,停机的顺序应与起动的顺序相反,即按了停止按钮后,先停2号运输带,5 s 后再停1号运输带。
“图1-1”给出了输入输出信号的波形图和顺序功能图。
控制1号运输带的Q1.0在步M0.1~M0.3中都应为1。
为了简化顺序功能图和梯形图,在步M0.1将Q1.0置为1,在初始步将Q1.0复位为0。
Y0Y12号运输带1号运输带I1.0I1.16s 5s复位 1号 运输带2号 运输带运行置位 1号 运输带延时 5s图1-1 运输带控制系统示意图与顺序功能图1. 创建使用S7 Graph 语言的功能块FB(1) 打开SIMATIC 管理器中的“Blocks ”文件夹。
(2) 用右键点击屏幕右边的窗口,在弹出的菜单中执行命令“Insert New Object→Function Block ”。
(3) 在“Properties →Function Block ”对话框中选择编程语言为GRAPH ,功能块的编号为FB 1。
单击【OK 】按钮确认后,自动打开刚生成的FB 1,FB 1中有自动生成的第1步Step 1和第1个转换Trans1。
2. S7 Graph 的两种编辑模式(1) “Direct ”(直接)编辑模式执行菜单命令“Insert ”→“Direct ”将进入“Direct ”编辑模式。
如果希望在某一元件的后面插入新的元件,首先用鼠标选择该元件,点击工具条上希望插入的元件对应的按钮,或从“Insert ”菜单中选择要插入的元件。
为了在同一位置增加同类型的元件,可以连续点击工具条上同一个按钮或执行“Insert ”菜单中相同的命令。
(2) “Drag and Drop ”编辑模式执行菜单命令“Insert ”→“Drag-and-Drop ”,将进入“Drag and Drop ”(拖放)编辑模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
使用S7 Graph 编程的例子“图1-1”中的两条运输带顺序相连,为了避免运送的物料在1号运输带上堆积,起动时应先起动1号运输带,延时6 s 后自动起动2号运输带。
停机时为了避免物料的堆积,应尽量将皮带上的余料清理干净,使下一次可以轻载起动,停机的顺序应与起动的顺序相反,即按了停止按钮后,先停2号运输带,5 s 后再停1号运输带。
“图1-1”给出了输入输出信号的波形图和顺序功能图。
控制1号运输带的Q1.0在步M0.1~M0.3中都应为1。
为了简化顺序功能图和梯形图,在步M0.1将Q1.0置为1,在初始步将Q1.0复位为0。
Y0Y12号运输带1号运输带I1.0I1.16s 5s复位 1号 运输带2号 运输带运行置位 1号 运输带延时 5s图1-1 运输带控制系统示意图与顺序功能图1. 创建使用S7 Graph 语言的功能块FB(1) 打开SIMATIC 管理器中的“Blocks ”文件夹。
(2) 用右键点击屏幕右边的窗口,在弹出的菜单中执行命令“Insert New Object→Function Block ”。
(3) 在“Properties →Function Block ”对话框中选择编程语言为GRAPH ,功能块的编号为FB 1。
单击【OK 】按钮确认后,自动打开刚生成的FB 1,FB 1中有自动生成的第1步Step 1和第1个转换Trans1。
2. S7 Graph 的两种编辑模式(1) “Direct ”(直接)编辑模式执行菜单命令“Insert ”→“Direct ”将进入“Direct ”编辑模式。
如果希望在某一元件的后面插入新的元件,首先用鼠标选择该元件,点击工具条上希望插入的元件对应的按钮,或从“Insert ”菜单中选择要插入的元件。
为了在同一位置增加同类型的元件,可以连续点击工具条上同一个按钮或执行“Insert ”菜单中相同的命令。
(2) “Drag and Drop ”编辑模式执行菜单命令“Insert ”→“Drag -and -Drop ”,将进入“Drag and Drop ”(拖放)编辑模式。
也可以点击工具条上最左边的【Preselected/Direct】(预选/直接)按钮,在“拖放”模式和“直接”模式之间切换。
在“拖放”模式点击工具条上的按钮,或从“Insert”菜单中选择要插入的元件后,鼠标将会带着“图1-2”右边被点击的图标移动。
图1-2 Sequencer 工具条如果鼠标附带的图形有“prohibited”(禁止)信号,即“图1-2”右边带红色边框的圆圈(中间有一条45°的红线),则表示该元件不能插在鼠标当前的位置。
在允许插入该元件的区域“禁止”标志消失,点击鼠标便可以插入一个拖动的元件。
插入完同类元件后,在禁止插入的区域点击鼠标的左键,跟随鼠标移动的图形将会消失。
3.生成顺序控制器的基本框架(1)在Direct编辑模式,用鼠标选中刚打开的FB 1窗口中工作区内初始步下面的转换,该转换变为浅紫色。
点击3次工具条中的步与转换按钮,将自上而下增加3个步和3个转换(见“图1-3”)。
图1-3 运输带控制系统的顺序功能图(2)用鼠标选中最下面的转换,点击工具条中的跳步按钮,输入跳步的目标步S1。
在步S1上面的有向连线上,自动出现一个水平的箭头,它的右边标有转换T4,相当于生成了一条起于T4,止于步S1的有向连线(见“图1-3”)。
至此步S1~S4形成了一个闭环。
4.步与动作的编程表示步的方框内有步的编号(例如S2)和步的名称(例如Delay1),点击后可以修改它们,不能用汉字作步和转换的名称。
执行菜单命令“View”→“Display with”→“Conditions and Actions”,可以显示或关闭各步的动作和转换条件。
在“直接”模式,用鼠标右键点击步右边的动作框,在弹出的菜单中执行命令“Insert New Object”→“Action”,将插入一个空的动作行。
一个动作行由命令和地址组成,它右边的方框用来写入命令,下面是一些常用的命令:(1)命令S:当步为活动步时,使输出置位为1状态并保持。
(2)命令R:当步为活动步时,使输出复位为0状态并保持。
(3)命令N:当步为活动步时,输出为1;该步变为不活动步时,输出被复位为0。
(4)命令L:用来产生宽度受限的脉冲,当该步为活动步时,该输出被置1并保持一段时间,该时间由L命令下面一行中的时间常数决定,格式为“T#n”,n为延时时间,例如T#5S。
(5)命令CALL:用来调用块,当该步为活动步时,调用命令中指定的块。
(6)命令D:使某一动作的执行延时,延时时间在该命令右下方的方框中设置,例如T#5S表示延时5s。
延时时间到时,如果步仍然保持为活动步,则使该动作输出为1;如果该步已变为不活动步,使该动作输出为0。
在“直接”模式用鼠标右键点击“图1-3”中第2步(S2)的动作框,在弹出的菜单中选择插入动作行,在新的动作行中输入命令S,地址为Q1.0,即在第2步将控制1号运输带的Q1.0置位。
第2步需要延时6s,用右键点击第2步的动作框,生成新的动作行,输入命令D(延时),地址为M0.3,在地址下面的空格中输入时间常数“T#6S”(6s)。
M0.3是步S2和S3之间的转换条件。
起动延时时间到时,M0.3的常开触点闭合,使系统从步S2转换到步S3。
5.对转换条件编程转换条件可以用梯形图或功能块图来表示,在“View”菜单中用“LAD”或“FBD”命令来切换两种表示方法,下面介绍用梯形图来生成转换条件的方法。
点击用虚线与转换相连接的转换条件中要放置元件的位置,在“图1-4”的窗口最左边的工具条中点击常开触点、常闭触点或方框形的比较器(相当于一个触点),用它们组成的串并联电路来对转换条件编程。
生成触点后,点击触点上方的“??.?”,输入绝对地址或符号地址。
用左键选中某一地址,再用右键点击它,在弹出的菜单中执行命令“insert symbols”,将会出现符号表,使符号地址的输入更加方便。
图1-4 S7 Graph 的LAD在用比较器编程时,可以将步的系统信息作为地址来使用。
下面是这些地址的意义:Step_name.T:步当前或最后一次被激活的时间。
Step_name.U:步当前或最后一次被激活的时间,不包括有干扰(disturbance)的时间。
如果监控条件的逻辑运算满足,表示有干扰事件发生。
6.对监控功能编程双击步S3后,切换到单步视图(见“图1-5”),选中Supervision(监控)线圈左边的水平线的缺口处,点击“图1-4”最左边的工具条中用方框表示的比较器图标,在比较器左边第一个引脚输入Belt2.T,Belt2是第3步的名称(2号运输带),在比较器左边下面的引脚输入“T#2H”,设置的监视时间为2h。
如果该步的执行时间超过2h,该步被认为出错,出错步被显示为红色。
图1-5 单步显示模式中的监控与互锁条件7.保存和关闭顺序控制器编辑窗口用菜单命令“File”→“Save”保存顺序控制器时,它将被自动编译。
如果程序有错误,在“Details”窗口给出错误提示和警告,改正错误后才能保存。
选择菜单命令“File”→“Close”关闭顺序控制器编辑窗口。
8.在主程序中调用S7 Graph FB完成了对S7 Graph程序FB1的编程后,需要在主程序OB1中调用FB1,同时应指定FB1对应的背景数据块。
为此应在SIMATIC管理器中首先生成FB1的背景数据块DB1。
在管理器中打开“Blocks”文件夹,双击OB1图标,打开梯形图编辑器。
选中网络1中用来放置元件的水平“导线”。
在S7 Graph编辑器中将FB1的参数设为Minimum(最小),调用它时FB1只有一个参数INIT_SQ,指定用M0.0作INIT_SQ的实参。
在线模式时可以用这个参数来对初始步S1置位。
打开编辑器左侧浏览窗口中的“FB Blocks”文件夹,双击其中的FB1图标,在OB1的网络1中调用顺序功能图程序FB1,在模块的上方输入FB1的背景功能块DB1的名称。
最后用菜单命令“File”→“Save”保存OB1,用菜单命令“File”→“Close”关闭梯形图编辑器。
9.用S7-PLCSIM仿真软件调试S7 Graph程序使用S7-PLCSIM仿真软件调试S7 Graph程序的步骤如下:(1)在STEP7编程软件中生成前述的名为“运输带控制”的项目,用S7 Graph语言编写控制程序FB1,其背景数据块为DB1,在组织块OB1中编写调用FB1的程序并保存。
(2)点击SIMATIC管理器工具条中的【Simulation on/off】按钮,或执行菜单命令“Options”→“Simulate Modules”,打开S7-PLCSIM窗口,窗口中自动出现CPU视图对象。
与此同时,自动建立了STEP 7 与仿真CPU的连接。
(3)在S7-PLCSIM窗口中点击CPU视图对象中的STOP框,令仿真PLC处于STOP 模式。
执行菜单命令“Execute”→“Scan Mode”→“Continuous Scan”或点击【Continuous Scan】按钮,令仿真PLC的扫描方式为连续扫描。
(4)在SIMATIC管理器左边的窗口中选中“Blocks”对象,点击工具条中的【下载】按钮,或执行菜单命令“PLC”→“Download”,将块对象下载到仿真PLC中。
(5)点击S7-PLCSIM工具条中标有【I】的按钮,或执行菜单命令“Insert”→“Input Variable”(插入输入变量),创建输入字节IB1的视图对象。
用类似的方法生成输出字节QB1、IB1和QB1以位的方式显示。
“图1-6”是在RUN模式时监控顺序控制器的画面,图中的“起动延时”和“停止延时”分别是“图1-3”中的M0.3和M0.4的符号地址。
(6)在S7-PLCSIM中模拟实际系统的操作点击CPU视图对象中标有RUN或RUN-P的小框,将仿真PLC的CPU置于运行模式。
在S7-Graph编辑器中执行菜单命令“Debug”→“Monitor”,或点击工具条内标有眼镜符号的“监控”图标,对顺序控制器的工作进程进行监控。
刚开始监控时只有初始步为绿色,表示它为活动步。
点击PLCSIM中I1.0对应的方框(按下起动按钮),接着再点击1次,使方框内的“√”消失,模拟放开起动按钮。
可以看到步S1变为白色,步S2变为绿色,表示由步S1转换到了步S2。
进入步S2后,它的动作方框上方的两个监控定时器开始定时。
它们用来计算当前步被激活的时间,其中定时器U不包括干扰出现的时间。
定时时间达到设定值6 s时,步S2下面的转换条件满足,将自动转换到步S3。