基于车辆快速开发系统的汽车牵引力控制目标控制器
tcs牵引力控制原理
tcs牵引力控制原理TCS牵引力控制原理引言:TCS(Traction Control System)是一种汽车动力控制系统,旨在提高车辆的牵引力和操控性能。
本文将介绍TCS牵引力控制原理,包括其工作原理、应用场景以及优势等方面。
一、TCS的工作原理TCS是基于车辆动力学原理设计的,通过对车轮的牵引力进行控制,提高车辆在低摩擦路面上的牵引性能。
其工作原理主要包括以下几个方面:1. 传感器检测:TCS系统通过车轮传感器检测车轮的转速和转向角度,实时获取车辆在行驶过程中的动态信息。
2. 数据分析:系统会对传感器获取的数据进行实时分析,判断车辆是否存在车轮打滑的情况。
3. 控制信号发出:一旦系统检测到车轮打滑现象,会立即向车辆的发动机管理系统发出控制信号,减少发动机的输出扭矩,从而减少车轮打滑的可能性。
4. 刹车干预:除了减少发动机输出扭矩外,TCS系统还可以通过对车轮进行独立刹车来降低车轮的旋转速度,以防止车轮打滑。
5. 牵引力恢复:一旦车轮打滑的情况得到控制,TCS系统会逐渐恢复车辆的牵引力,使车辆能够更好地适应当前路面状况。
二、TCS的应用场景TCS系统广泛应用于各类汽车中,尤其在高性能车辆和越野车等特殊路况下发挥着重要的作用。
1. 高性能车辆:在高性能车辆的驾驶过程中,往往会有较高的加速和急刹车等操作。
TCS系统能够帮助车辆更好地控制牵引力,提供更精准的操控性能,确保车辆在高速行驶过程中的稳定性。
2. 恶劣路况:在雨雪天气、湿滑路面或者砂石路面等恶劣路况下,车辆容易出现打滑现象。
TCS系统的引入可以有效降低车辆打滑的概率,提高车辆在恶劣路况下的牵引力。
3. 越野车辆:越野车辆通常需要在复杂的地形条件下行驶,例如沙漠、泥泞路面或者崎岖山路等。
TCS系统可以根据车辆的实际情况,智能地调节车轮的牵引力,使车辆能够更好地适应不同地形的要求。
三、TCS的优势TCS系统作为一种先进的车辆控制技术,具有以下几个显著的优势:1. 提高行驶安全性:TCS系统能够实时监测车辆的牵引力状况,避免车轮打滑引发的事故,提高行驶的安全性。
浅析汽车牵引力控制系统设计与仿真

10.16638/ki.1671-7988.2017.13.019浅析汽车牵引力控制系统设计与仿真严彦(武汉理工大学,湖北武汉430070)摘要:牵引力控制系统通过控制车轮的滑转状态,合理的分配驱动轮力矩,提高了车轮对路面附着的利用程度,有效提高了车辆的动力性,改善了操纵稳定性。
首先基于PID算法分别设计了汽车牵引力驱动控制器和制动控制器,并采用Matlab/simulink软件完成算法的模块搭建。
然后在Carsim软件中建立了汽车仿真模型,将simulink软件中的驱动控制器和制动控制器分别与汽车模型进行联调。
最后对汽车仿真模型在均一低附着路面和分离路面进行仿真模拟,分析了驱动轮滑转率。
结果表明,采用汽车牵引力控制系统能够使驱动轮的滑转率控制在目标范围内,能够抑制驱动轮的过度滑转,充分利用地面的附着条件,提高了汽车的动力性和操纵稳定性。
关键词:牵引力控制系统;滑移率;PID控制;仿真中图分类号:U462.1 文献标识码:A 文章编号:1671-7988 (2017)13-60-05Design and simulation of automotive traction control systemYan Yan( Wuhan university of technology, Hubei Wuhan 430070 )Abstract: In this paper, the lightweight design of the steel plate spring of a light truck suspension system is designed as the carrier, and the optimal design of the thin plate spring is optimized by GUI program. By establishing the finite element of the leaf spring and the connecting piece The CAE model is analyzed and calculated. After the physical products are tested and verified by the physical products under the bench test conditions, the correction results of the GUI and CAE are proposed to ensure the practicality of the design.Keywords: small piece steel leaf spring lightweight optimization design methodCLC NO.: U462.1 Document Code: A Article ID: 1671-7988 (2017)13-60-05引言汽车牵引力控制系统(TCS)是车辆在起步、加速、爬坡时防止驱动轮发生过度滑转,以获得最大牵引力和最佳操纵稳定性的一种主动控制系统,是继制动防抱死控制系统(ABS)之后又一新发展,对于改善车辆的牵引性、操纵性、稳定性、安全性和舒适性等具有重要的意义。
基于dSPACE的车用牵引电机控制器设计与实现

燃料电池轿车用牵引电机控制系统框图如图 1所示。其主要包括主回路、定子电流最优控制 模块、电压控制模块三大部分。
图1中:转矩控制指令r+与转速反馈信号
图l 燃料电池轿车用牵引电机控制系统框图
∞,经定子电流最优控制模块后得到期望的直轴 电流指令西和交轴电流指令if;经电流PI调节 器后,输出控制电压的直轴分量M:和交轴分量 u?;同时,i、i?及山通过前馈解耦控制模块输出 直轴补偿电压分量U 7。和交轴补偿电压分量Ⅱ’。; 最终控制电压的直轴分量u。和交轴分量‰通过 Park逆变换模块,输出至空间矢量脉宽调制 (SVPWM)模块,进而控制功率变换器及牵引电机 运行。 2.1定子电流最优控制策略
借助dSPACE的快速控制原型功能,在实际 电机驱动系统上验证控制器设计方案、控制策略 与参数设置的正确性。在实时代码实现软件RTI (Real.Time Interface)与试验软件ControlDesk¨1 支持下,用一台与实际电机相连的实时仿真机 dSPACE来代替真实的数字控制器,实现电机系 统快速控制原型的闭环测试,实时观测系统的运 行状态,修正控制参数。
前馈补偿环节;(6)Park逆变换;(7)电压SVP· WM,得到相邻电压矢量的作用时间,并生成三相 电压对应的占空比;(8)产生硬件PWM信号的 RTI模块。当仿真模型建立好后,点击Simulation Parameters/Real—Time Workshop/Build按钮,即可 将整个仿真模型转化为实时代码,在dSPACE单 板实时系统DSl 103上运行。
彳;r
一“一之≈刁卅 O如∞如∞如∞如∞
刀/fr.min-t) (B)d轴电流跟踪曲线
《 、
2022年职业考证-软考-嵌入式系统设计师考试全真模拟易错、难点剖析AB卷(带答案)试题号:3
2022年职业考证-软考-嵌入式系统设计师考试全真模拟易错、难点剖析AB卷(带答案)一.综合题(共15题)1.单选题下面嵌入式处理器中最适合于做FFT(快速傅立叶变换)计算的是()。
问题1选项A.嵌入式微处理器B.微控制器C.DSPD.PowerPC处理器【答案】C【解析】嵌入式DSP处理器是专门用于信号处理方面的处理器,它在系统结构和指令算法方面进行了特殊设计,具有很高的编译效率和指令的执行速度,在数字滤波、FFT、谱分析等各种仪器上具有大规模的应用,DSP处理器一般采用哈佛结构进行设计。
2.单选题下面有关Flash存储器的描述中,不正确的是()。
问题1选项A.Flash存储器属于非易失存储器B.Flash存储器的读操作与SRAM存储器的读操作基本相同C.Flash存储器的写操作与SRAM存储器的写操作基本相同D.Flash存储器在写入信息前必须首先擦除原有信息【答案】C【解析】Flash Memory是一种非易失性存储器NVM(Non-Volatile Memory),根据结构的不同可以分为:NOR Flash、NAND Flash。
先擦后写:由于Flash Memory的写操作只能将数据位从1写成0,而不能从0写成1,所以在对存储器进行写入之前必须先执行擦除操作,将预写入的数据位初始化为1。
操作指令:除了NOR Flash的读,Flash Memory的其他操作不能像RAM那样,直接对目标地址进行总线操作。
例如执行一次写操作,它必须输入一串特殊的指令(NOR Flash ),或者完成一段时序(NAND Flash)才能将数据写入到Flash Memory中。
所以,不正确的是C。
3.单选题以下关于哈希函数的说法中,不正确的是()。
问题1选项A.哈希表是根据键值直接访问的数据结构B.随机预言机是完美的哈希函数C.哈希函数具有单向性D.哈希函数把固定长度输入转换为变长输出【答案】D【解析】Hash,一般翻译为散列、杂凑,或音译为哈希,是把任意长度的输入通过散列算法变换成固定长度的输出,该输出就是散列值。
发动机牵引力控制是什么

发动机牵引力控制是什么
一、引言
发动机牵引力控制(ETC)是现代汽车技术中的一个重要方面,它的作用是根
据特定的驾驶条件和要求,通过电子系统管理和调控发动机的输出功率,以确保车辆在不同路况下具有良好的牵引性能和稳定性。
二、ETC的原理
发动机牵引力控制的原理是通过对发动机输出的扭矩和功率进行精确控制,以
适应不同驾驶条件下车辆的需求。
ETC系统通过传感器监测驾驶员的需求、车辆
速度、转向角度以及路面状况等因素,从而智能地调整发动机的运行参数,使车辆驶入和驶出弯道、爬坡、超车等驾驶操作更加顺畅和安全。
三、ETC的优势
1.提高驾驶安全性:ETC系统可以根据实时路况动态调整发动机输出,
提供更好的牵引力控制,以减少车辆打滑、失控等意外事件的发生。
2.提升行车舒适性:通过ETC系统对发动机输出的精准调控,可以降
低车辆的颠簸感,提高行车平稳性,增强乘坐舒适度。
3.节约燃油:ETC系统通过优化发动机功率输出,实现动力的有效利
用,降低驾驶的能耗,达到节约燃油的效果。
四、ETC的应用
目前,绝大多数现代汽车都配备了发动机牵引力控制系统,其中一些高端车型
还采用了更加先进的电子控制技术。
ETC系统已经成为当前汽车行业标配,为驾
驶者提供更加安全、舒适和高效的驾驶体验。
五、结语
发动机牵引力控制技术的不断发展与完善,为提升汽车性能和行车安全提供了
重要保障。
ETC系统的智能化调控和精准控制能力,有力地提升了驾驶者驾驶体验,是现代汽车技术不可或缺的重要组成部分。
车辆牵引力控制系统原型样机的开发研究

1 前 言
车辆 在 弱附 着 地 面 上起 步 、加 速或 爬 坡 时 , 驱 动 轮非 常容 易 发生 过 度 滑转 而 导 致 车辆 驱 动 性 能 、 操 纵性 能 和 稳定 性 变 差 , 引 力 控 制 系 统 ( C ) 牵 T S 可 减 小 发 动机 输 出力 矩 , 同时 向打 滑 车轮 施 加制 动力
矩 , 而 将 驱 动 轮 滑 转 控 制 在 最 佳 范 围之 内 , 效 从 有
提 高车辆 的牵 引性 能 ] 。 在 牵 引 力控 制 系统 的开 发 过 程 中 , 用 纯数 字 采
模 拟 、 件 在 环试 验 和道 路 试 验 对 系统 软 硬 件进 行 硬
调试 , 以大 大缩 短 开发 周 期 、 省 开 发 资金 , 时 可 节 同 可 以避 免在 危 险工 况 下进 行 道 路 试 验 . 冰 雪路 面 如 加速转 向和分 离路 面直 线加 速等 试验 [ 。 4 . 设 计 了牵 引 力控 制 逻 辑 , 在 Malb Smuik 并 t /i l a n 环境 下建立 了基 于 s tf w的控 制算 法 原 型 .建立 te o al 了离 线仿 真 平 台 、 硬件 在 环 开 发平 台和 车 载快 速 开 发平 台 。给 出了某 后 轮 驱动 汽车 在分 离路 面上进 行 牵 引力控 制 的控 制算 法 原 型在 纯 P C模 拟 、硬件 在 环试 验和道 路试 验各 阶段 调试 的实例 。
Zh o Ja ,i u eL ig S n ae gWu Ja a inL d , i n , o g D fn , in Yo J
( l nv r t) J i U ies y in i
【 bta tA pyn t bsf aet w t agrh rty eo at ncnrl n s bi i ltnsf ae A src] p ligMaa t r o re l i m po t fr i ot det l hs ai t r l o w i o t op tco oa a s mu o o w
基于FSEC赛车牵引力控制策略研究

基于FSEC赛车牵引力控制策略研究随着汽车竞速运动的发展,牵引力控制成为了提高赛车性能和安全性的关键因素。
在这方面,FSEC(Front Slip Equal Control,前轮滑等控制)策略被广泛应用于赛车的牵引力控制系统中。
本文将对基于FSEC的赛车牵引力控制策略进行深入研究。
FSEC是一种利用车辆动态特性实现前轮滑等控制的策略。
通过对车辆的传感器数据进行实时监测和分析,FSEC可以精确计算出前轮滑移率,并根据这一数值调整前轮的牵引力。
通过控制前轮的牵引力,FSEC可以在保持最大牵引力的同时,防止前轮过度滑移,提高赛车的加速性能和操控性。
在研究中,我们首先对FSEC策略进行了理论分析。
通过数学模型和仿真实验,我们深入研究了该策略在不同驾驶条件下的牵引力控制效果。
实验结果表明,FSEC策略可以有效减少前轮的滑移,提高赛车的牵引力和加速性能。
接下来,我们在实际赛车中应用了该控制策略,并进行了系统性能测试。
通过对比实验数据,我们发现FSEC策略在不同赛道和驾驶员的情况下都能够有效提高赛车的牵引力和操控性。
与传统的牵引力控制策略相比,FSEC策略具有更高的精度和稳定性,能够更好地适应不同的驾驶条件。
此外,我们还对FSEC策略的优化方法进行了研究。
通过对控制算法的改进和参数优化,我们进一步提高了FSEC策略的性能。
优化后的FSEC策略在赛车的牵引力控制中表现出更好的效果,使得赛车能够更加稳定和快速地加速。
综上所述,基于FSEC的赛车牵引力控制策略是一种有效的方法,可以提高赛车的牵引力和操控性。
通过对FSEC策略的理论研究、实际应用和优化改进,我们对赛车的牵引力控制有了更深入的了解。
未来,我们将继续深化研究,进一步优化和改进FSEC策略,为赛车运动的发展做出更大的贡献。
汽车牵引力控制系统的作用与工作原理
如题所示,我将写一篇关于汽车牵引力控制系统的作用与工作原理的文章,帮助你深入了解这一主题。
1. 汽车牵引力控制系统的作用在现代汽车设计中,牵引力控制系统起着至关重要的作用。
它可以帮助汽车保持良好的牵引性能,提高行驶的稳定性和安全性。
以及它能够帮助车辆在恶劣路况下保持良好的牵引性能,如雨雪天气和泥泞路面。
这些功能使得汽车在恶劣天气下能够更安全地行驶,也提升了驾驶者的行驶体验。
2. 汽车牵引力控制系统的工作原理牵引力控制系统的工作原理主要是通过感知车辆牵引力的状态,利用传感器检测车轮的转速变化,判断车辆是否出现打滑情况,并及时调整车辆的牵引力分配。
这种系统通常通过使用车轮速度传感器来监测车轮转速,一旦系统检测到车轮打滑,就会立即降低发动机功率或者使用制动系统来减缓车轮的速度,以达到控制牵引力的目的。
3. 个人观点和理解作为我的个人观点和理解,对于汽车牵引力控制系统的重要性,我深表认同。
在现代社会,车辆行驶的环境复杂多变,而汽车牵引力控制系统的出现极大地提高了行车的安全性和稳定性。
特别是在恶劣天气下,如雨雪天气或泥泞路面,系统可以帮助车辆有效地提高牵引性能,减少打滑风险,让驾驶者更加安全舒适地行驶。
作为汽车技术的一部分,牵引力控制系统是必不可少的,也是汽车行驶安全的重要保障。
总结回顾汽车牵引力控制系统是现代汽车技术的重要组成部分,它的作用和工作原理在确保车辆行驶安全性和稳定性方面具有重要意义。
通过监测车轮转速和调整牵引力分配,系统能够及时识别并应对车辆打滑情况,提高车辆在复杂路况下的牵引性能。
个人认为,这一系统的出现极大地提高了驾驶者的行车安全感和行车舒适度,有助于降低交通事故的风险。
汽车牵引力控制系统是一项技术上的重要突破,对于汽车行业和驾驶者来说具有重要意义。
以上就是针对汽车牵引力控制系统的作用与工作原理的文章,希望能够为你提供帮助和清晰的了解。
如今,随着汽车科技的不断发展,汽车牵引力控制系统已经成为现代汽车的标配之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
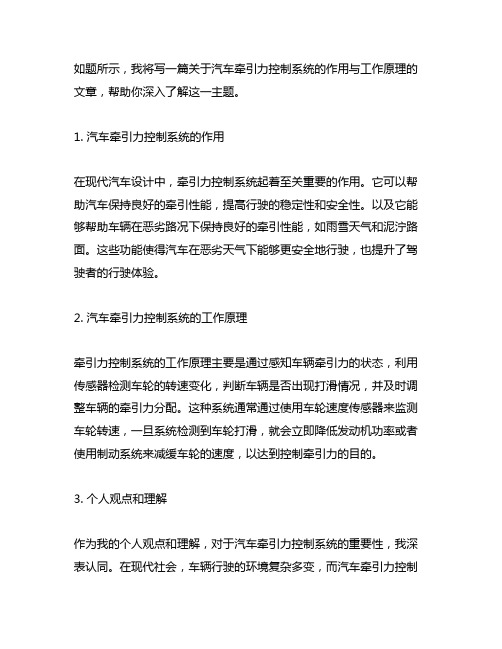
第35卷第1期吉林大学学报!工学版"Vol .35No .12005年1月Jour nal of Jili n Uni versit y (En g i neeri n g and T echnol o gy Editi on )Jan .2005文章编号!1671-5497(2005)01-0001-06收稿日期:2004-09-15.基金项目:中国人民解放军总装备部预先研究项目(2001-CL -0102).作者简介:宋大凤(1977-)9女9博士研究生.研究方向:汽车牵引力电子控制系统.E -m ail :sdf 770106@si na .co m 通讯联系人:李幼德(1946-)9男9教授9博士生导师.研究方向:汽车地面系统研究与控制.E -m ail :aut o _tcs @ l u .edu .cn基于车辆快速开发系统的汽车牵引力控制目标控制器宋大凤#李静#石桂花#赵健#李幼德(吉林大学汽车工程学院9吉林长春130022)摘要C 为了检验汽车牵引力控制算法与目标控制器硬件\外围传感器及执行器之间的性能匹配状况9利用车辆快速开发系统设计了目标控制器硬件在环试验平台9并进行了目标控制器硬件在环试验G 试验表明C 所设计的目标控制器能够有效地将驱动轮滑转率控制在最佳值附近9消除了驱动轮过度滑转现象9从而为目标控制器的道路试验奠定了基础G 关键词C 车辆工程S 牵引力控制S 快速开发系统S 目标控制器S 硬件在环中图分类号C U463.54文献标识码C ATar g et controller f or tracti on control s y ste m based on vehicle ra p i d devel o p m ent s y ste mSONG D af en g 9LI Ji n g 9S~I Gui hua 9Z ~AO Ji an 9LI Youde(COlle g e O f Aut O m Otiue En g ineerin g 9Jilin Uniuersit S 9Chan g c hun 1300229China )Abstract :I n or der t o verif y t he m atch bet ween t he vehi cl e tracti on contr ol al g orit h m and t he t ar g etcontr oll er har d ware i ncl udi n g t he sensors and t he act uat ors 9a har d ware-i n-t he-l oo p (~I L )t est p l atf or m was devel o p ed f or t he contr oll er har d ware b y m eans of a vehi cl e ra p i d devel o p m ent s y st e m and t he ~I L t ests of t he t ar g et contr oll er har d ware were p erf or m ed .T est results sho wed t hat t he devel o p ed contr oll er eff ecti vel y kee p s t he sli p rat e of t he dri vi n g wheel i n t he o p ti mu m ran g e andavoi ds t he excessi ve s p i n of t he dri vi n g wheel 9t heref ore l a y s t he f oundati on f or t he r oad t est of t he t ar g et contr oll er .Ke y words :aut o moti ve en g i neeri n g S tracti on contr ol S ra p i d devel o p m ent s y st e m S t ar g et contr oll er S har d ware-i n-t he-l oo p随着人们对汽车性能要求的提高9汽车牵引力控制被广泛重视1O 目前9国内汽车牵引力控制系统的开发仍处于仿真及台架试验阶段 2~49其目标控制器的开发与研究则相对更欠缺9所以开发具有自主产权的汽车牵引力控制器具有重要的现实意义O 本文作者研制了牵引力控制器硬件系统9开发了控制器控制算法9并利用车辆快速开发系统建立了目标控制器硬件在环开发平台9进吉林大学学报!工学版"第35卷行了基于目标控制器的硬件在环试验o 试验结果表明9所研制的牵引力控制目标控制器工作可靠9能够有效避免驱动轮过度滑转9提高牵引力o1目标控制器硬件在环开发平台基于目标控制器的硬件在环开发平台主体结构如图1所示o 主要包括五大部分:车辆快速开发系统\传感器/执行器\单片机目标控制器\单片图1基于目标控制器的硬件在环开发平台F i g .1~I L devel o p m ent p latf or m based on tar g et contr oll er机开发系统及试验样车o 1.1车辆快速开发系统车辆快速开发系统结构原理如图2所示o 主要由嵌入式PC 工业控制计算机\数据采集卡及信号调理箱组成o其中9PC 机存储由MATLAB /S I MULI NK 语言编制的模拟车辆行驶状态的动力学仿真软件和C 语言编制的底层采集卡驱动程序o 数据采集卡CP U 采用I nfi neon C164C I 单片机9利用其外设资源进行输出/输入和A /D 转换o 采集卡与PC 机之间通过104总线连接o 采集卡利用双口RA M 与PC 交换数据9将硬件外设的输入/输出读入PC 机的同时9读入PC 机发出的命令9并由输出电路输出o 信号调理箱主要负责传感器输入信号的处理\输出信号的驱动及电源的管理等o车辆快速开发系统的汽车驱动动力学仿真软件主体结构由发动机模块\制动器模块\传动系统模块\轮胎模块及整车模块组成 5]o 其中9发动机模块采集油门位置信号9制动器模块采集制动压力信号9同时仿真软件运行得到的车辆轮速信号由采集卡通过捕捉/比较端口以脉冲形式输出给图2快速开发系统结构原理图F i g .2Confi g urati on of ra p i d devel o p e m ent s y ste m目标控制器9以代替实车轮速传感器的输出信号o 1.2传感器!执行器目标控制器所需的传感器有:输出模拟信号的油门位置传感器及方向盘转角传感器;输出脉冲信号的霍尔式轮速传感器o 开关输入有:制动开关\TCS 总开关o 其中9制动开关主要用来判断制动工况以便及时退出牵引力控制进行常规制动;TCS 总开关用于人为进入或退出车辆TCS控制o 执行器主要有油门动作执行器及驱动轮制动压力调节器o 电子油门执行器采用控制精度较高的步进电机;驱动轮制动压力调节器采用两位两通高速开关阀9且制动压力通过泵电机带动泵来实现o1.3目标控制器目标控制器主要由单片机最小系统\输入电路\输出电路\通讯接口电路及电源管理部分组成o 主要采集并计算轮速\制动开关信号及TCS 开关信号9根据这些外部信号运行牵引力控制算法9并输出控制指令o 1.4单片机开发系统单片机开发系统为目标控制器软件的在线调试提供平台o 它以仿真RA M 代替目标控制器的程序存储器9所以源程序可随时在线修改o 同时单片机仿真软件能够支持各种单片机高级语言(如C 语言)9软件编程简单\直观\可读9具有良好的移植性o2第1期宋大凤!等"基于车辆快速开发系统的汽车牵引力控制目标控制器2目标控制器设计2.1目标控制器硬件设计选择I nt el 16位单片机80C196KC 作为控制器CP U 6为了满足软件设计和数据存储的需要 设计中扩展了64K 的程序存储器和8K 的静态RA M 控制器电路原理如图3所示模拟输入经过二阶有源低通滤波电路后直接送给80C196KC 内部的A D 转换器 提高了抗干扰能力轮速信号直接输出幅值为12V 的方波信号图3目标控制器电路原理图F i g .3T ar g et contr oller circuit通过电平转换后送给80C196KC 的高速输入口~I S 进行脉冲捕捉 进而通过测量周期或频率进行轮速计算 7采用开关量的输出控制执行器 由于单片机的外设资源有限 而执行器控制个数又较多 所以对于P 3 P 4口 利用数据总线通过写外部数据存储单元的方式对16路电磁阀进行控制 另外 通过P 1口对电子油门执行器进行控制 由于P 1口是标准的输入 输出口 所以无需地址选通 可通过单片机直接输出控制指令考虑到整个系统的可靠性和抗干扰性 防止现场强电磁干扰或工频电压反串到ECU 中 在ECU 设计中 采用了光电隔离技术 可以有效地隔离电信号 同时为防止程序运行出错 增加了看门狗电源 即使程序运行出现故障也可恢复正常运行目标控制器除了硬件在环试验时从快速开发系统获取模拟轮速方波信号外 在实车道路试验时也可直接通过轮速传感器获得实际轮速信号通过外部切换开关对模拟多路复用器4053进行控制 则可根据实际情况对轮速信号进行选择 2.2目标控制器软件设计采用油门控制与制动控制联合控制的方法对驱动轮进行牵引力控制 程序框图如图4所示 控制算法采用单片机C 语言编程 并采用模块化编程结构 即根据所要求的功能编写不同的功能模块 这样编程时只需调用相关功能模块即可 且使整个软件结构清晰 可读性较强 便于软件的调试和完善 控制系统主要包括初始化模块 轮速采集模块 油门控制模块 制动控制模块 步进电机动作模块及电磁阀动作模块油门控制模块采用增量式PI 控制方法 5控制器输入误差e =u r -u t控制器输出油门位置增量d d = pe +i d e 式中 u t 为目标车速 u t =u x 1-s oe s oe 为油门控制目标滑移率 u x 为车速 u r 为驱动轮速均值3吉林大学学报!工学版"第35卷p \i 分别为比例系数和积分系数9d e 为输入误差增量O驱动轮制动控制采用门限控制方法 89如图5所示O 图中9s ob 为制动控制目标滑移率90为单个驱动轮轮速9a 为驱动轮角加速度O 其控制思想主要是根据驱动轮轮速及角加速度与其阈值进行比较的结果来决定下一工作循环的制动压力状态O 试验发现9采用压力调节器~CU 对驱动轮进行制动控制时9制动压力上升或下降速度较快9导致制动压力波动较大O 为此9要求驱动轮增压图4牵引力控制程序框图F i g .4B l ock di a g ra m of tracti on control图5制动控制程序框图F i g .5B l ock di a g ra m of brake contr ol 或减压控制之后的下一循环强制进行保压控制O3目标控制器硬件在环试验试验初始车速为3m s 9加速踏板位置100%9变速器为3档O 图6~13的试验曲线中91为左侧驱动轮轮速92为右侧驱动轮轮速93为实际车速94为油门控制目标车速95为制动控制目标车速O 3.1均一低附着路面硬件在环试验路面附着系数为0.1O 图6为无牵引力控制时驱动轮速和车速的试验曲线O 可见驱动轮速很快超过目标车速而发生过度滑转O 图7为油门单独PI 控制实验曲线O 初始时刻驱动轮速难以在较短时间内被控制在目标车速附近9但在以后的时间内驱动轮速较好地稳定在目标车速附近O 可见油门控制车辆稳定性好O 但由于发动机的响应滞后及油门执行器速度等问题导致油门控制实时性较差O 图8为驱动轮制动控制试验曲线O 与油门控制试验曲线相比9控制响应速度较快9但驱动轮速波动较大9这是电磁阀动作快所导致的结果O图6无牵引力控制硬件在环试验F i g .6~I L test of non-tracti on control图7油门PI 控制试验曲线F i g .7T est cur ves of t hr ottl e PI contr olO4O第1期宋大凤!等"基于车辆快速开发系统的汽车牵引力控制目标控制器图8驱动轮制动控制试验曲线F i g .8T est cur ves of dri ve wheel brake contr ol图9为油门PI 控制和驱动轮制动控制联合控制试验曲线!其中"油门PI 控制滑移率s oe =0.2"制动控制目标滑移率sob=0.3!由试验曲线可见"驱动轮速能较快地稳定在目标车速"同时在整个控制过程中波动相对较小"发挥了油门控制和制动控制的优势!图9油门控制与制动控制共同作用F i g .9S y ner g estic cur ves of t hr ottl e contr oland brake contr ol3.2附着系数分离路面硬件在环试验左侧为附着系数为0.1的低附着路面"右侧为附着系数为0.6的高附着路面#采用油门PI 控制和驱动轮制动控制联合作用!图10为无牵引力控制试验结果"可见左右驱动轮速很快分离"高附着路面附着力未能充分利用"而低附着路面驱动轮速很快超过目标车速发生过度滑转!图11为牵引力控制时的试验结果"可见左右驱动轮过大的轮速差已被消除"同时高附着路面的附着力得到了充分利用"所以车速得到了较大的提高!3.3棋盘路面硬件在环试验0~3s 左侧为均一低附着"右侧为均一高附着"3~6s 左侧为均一高附着"右侧为均一低附着#6~10s 左侧为均一低附着"右侧为均一高附着!其中"均一低附着系数为0.1"均一高附着系数为0.6!图12为无牵引力控制的试验曲线!可见"左右驱动轮始终存在轮速差"驱动轮产生过度滑转!图13为采用油门PI 控制和驱动轮制动控制联合作用时的试验结果!可见"控制系统能将处在低附着路面的驱动轮的轮速控制在目标车速附近"同时能够自动识别路面附着的变化"从而图10分离路面下无牵引力控制试验曲线F i g .10T est cur ves of non-tracti on contr olon s p lit -卜road图11分离路面下牵引力控制试验曲线F i g .11T est cur ves of tracti on contr ol on s p lit-卜road图12棋盘路面下无牵引力控制试验曲线F i g .12T est cur ves of non-tracti on contr olon multi-sli p r oad$5$吉林大学学报!工学版"第35卷图13棋盘路面下牵引力控制试验曲线F i g.13T est cur ves of tracti on contr olon multi-sli p r oad决定是否进入制动控制或退出制动控制4结论<1>控制算法与目标控制器硬件及传感器执行器性能匹配良好能较好地实现牵引力控制但控制速度有待于进一步提高<2>各种路面工况下车辆的硬件在环加速试验表明设计的控制算法实用性较高能使驱动轮速维持在目标车速附近提高了牵引力参考文献!1KAZ US~I~oso m i AK I RA Na g ae S~I NSUKE Ya m a mot o.D evel o p m ent of acti ve-tracti on contr ols y ste m C/SAE Pa p er2000-01-1636.2~ROVAT D avori n D.M et hod and s y ste m f or coor di nated en g i ne and trans m issi on contr ol duri n gtracti on contr ol i nter venti on P.United S tates Pa-tent61231641999.3李静李幼德赵健宋大凤.牵引力控制系统模糊PI 控制方法研究J.汽车工程200426<3>=287-290.LI Ji n g LI Youde Z~AO Ji an SONG D af en g.A research on f uZZ y PI f or tracti on contr ol s y ste m J.Aut o moti ve En g i neeri n g200426<3>=287-290.4李静李幼德赵健宋大凤.四轮驱动汽车沙地牵引力控制方法仿真J.吉林大学学报=工学版200434<1>=75-78.LI Ji n g LI Youde Z~AO Ji an SONG D af en g.S i mulati on of f our wheel dri ve vehicl e tracti on con-tr ol on sand y terrai n J.Jour nal of Jili n Uni versit y<En g i neeri n g and T echnol o gy Editi on>200434<1>= 75-78.5李静.4>4越野汽车牵引力控制策略与控制算法研究D.长春=吉林大学汽车工程学院2003.LI Ji n g.S t ud y on t he contr ol strate gy and contr ol al g orit h m of tracti on contr ol s y ste m f or4WD vehi-cl es D.Chan g chun=Coll e g e of Aut o moti ve En g i-neeri n g Jili n Uni versit y2003.6孙涵芳.Intel16位单片机M.北京=北京航空航天大学出版社2002.7程军.Intel80C196单片机应用实践与C语言开发M.北京=北京航空航天大学出版社2000.8赵健.TCS制动压力调节装置及分离路面控制逻辑研究D.长春=吉林大学汽车工程学院2003.Z~AO Ji an.The ex p l oitati on of4WD TCS brake p ressure modul at or&research of contr ol l o g ic on s p lit-ul oad D.Chan g chun=Coll e g e of Aut o moti ve En g i neeri n g Jili n Uni versit y2003.<责任编辑陈永杰>-6-。