第十一届智能车技术报告_杭州电子科技大学
飞思卡尔智能车比赛细则

2016目录第十一届竞赛规则导读参加过往届比赛的队员可以通过下面内容了解第十一届规则主要变化。
如果第一次参加比赛,则建议对于本文进行全文阅读。
相对于前几届比赛规则,本届的规则主要变化包括有以下内容:1.本届比赛新增了比赛组别,详细请参见正文中的图1和第四章的“比赛任务”中的描述;2.第十届电磁双车组对应今年的A1组:双车追逐组。
其它组别与新组别的对应关系请参见图2;3.为了提高车模出界判罚的客观性,规则提出了两种方法:路肩法和感应铁丝法,详细请见赛道边界判定”;4.改变了原有的光电计时系统,所有赛题组均采用磁感应方法计时,详细请参见“计时裁判系统”;5.取消了第十届的发车灯塔控制的方式;6.赛道元素进行了简化,详细请参见“赛道元素”;7.赛道材质仍然为PVC耐磨塑胶地板,但赛题组A2不再需要赛道。
8.对于车模所使用的飞思卡尔公司MCU的种类、数量不再限制。
9.比赛时,每支参赛队伍的赛前准备时间仍然为20分钟,没有现场修车环节。
一、前言智能车竞赛是从2006开始,由教育部高等教育司委托高等学校自动化类教学指导委员会举办的旨在加强学生实践、创新能力和培养团队精神的一项创意性科技竞赛。
至今已经成功举办了十届。
在继承和总结前十届比赛实践的基础上,竞赛组委会努力拓展新的竞赛内涵,设计新的竞赛内容,创造新的比赛模式,使得围绕该比赛所产生的竞赛生态环境得到进一步的发展。
为了实现竞赛的“立足培养、重在参与、鼓励探索、追求卓越”的指导思想,竞赛内容设置需要能够面向大学本科阶段的学生和教学内容,同时又能够兼顾当今时代科技发展的新趋势。
第十一届比赛的题目在沿用原来根据车模识别赛道传感器种类进行划分的基础类组别之上,同时增加了以竞赛内容进行划分的提高类组别,并按照“分赛区普及,全国总决赛提高”的方式,将其中一个类别拓展出创意类组别。
第十一届比赛的题目各组别分别如下:●基础类包括B1光电组、B2摄像头组、B3电磁直立组、B4电轨组;●提高类包括A1双车追逐组、A2信标越野组;●创意类包括I1 电轨节能组。
杭州电子科技大学信息工程学院(电磁)-杭电信工1队技术报告

第六届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:杭州电子科技大学信息工程学院队伍名称:杭电信工 1 队参赛队员:梁利锋何少华陈巍带队教师:尹克曾毓关于技术报告和研究论文使用授权的说明本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:梁利锋何少华陈巍带队教师签名:尹克曾毓日期:2011.8.11目录关于技术报告和研究论文使用授权的说明 (II)摘要 ................................................................................................................................................ I V 第一章引言. (1)第二章机械结构部分 (2)2.1 舵机的固定与安装 (2)2.2 前轮的调整 (3)2.3 差速的调整 (4)2.4 整车重心的调整(静止状态) (4)2.5 半米的前瞻机械系统 (5)第三章传感器的选择和布局 (6)3.1 传感器的选择 (6)3.2 电磁感应线圈在磁场中的特性 (7)3.3 传感器布局 (9)第四章硬件电路模块 (11)4.1 控制器模块 (12)4.2 路径识别模块 (13)4.3 电源模块 (15)4.4 测速模块 (16)4.5 电机驱动模块 (16)4.6 起跑线检测模块 (17)4.7 LCD液晶显示与键盘模块 (18)4.8 单片机控制模块 (18)第五章智能车软件设计 (20)5.1 控制总流程 (20)5.2 导线位置提取 (20)5.3 系统控制算法 (21)第六章开发与调试 (23)第七章智能车技术参数说明 (24)第八章鸣谢 (25)第九章总结 (I)附录A 电路原理图 (II)附录B 核心算法子程序 (VI)摘要本智能小车以飞思卡尔16 位微控制MC9S12XS128 作为唯一的核心控制单元,采用电感线圈和干簧管获取道路信息,通过设计简单的PID 速度控制器和简单的PID 方向控制器实时调整小车的速度与转角。
《智能车之技术报告》课件

导航技术是智能车的指南针,它能够让 车辆在复杂的道路和交通环境中找到正
确的路径并引导驾驶员到达目的地。
导航技术包括GPS定位、地图匹配、路 径规划等技术,它们能够提供高精度、 高可靠性的导航服务,以支持智能车的
各种应用场景。
导航技术的发展需要不断优化和升级, 以提高其性能和可靠性。
03
智能车的实际应用
智能车的发展历程
总结词
智能车的发展阶段和里程碑
详细描述
智能车的发展历程可以分为四个阶段。第一阶段是辅助 驾驶阶段,主要是利用一些传感器和控制器来实现简单 的驾驶辅助功能。第二阶段是部分自动驾驶阶段,车辆 可以在特定情况下自主驾驶,但驾驶员仍需保持警惕并 随时接管控制。第三阶段是高度自动驾驶阶段,车辆可 以在大多数情况下自主驾驶,但仍有一定的限制和条件 。第四阶段是完全自动驾驶阶段,车辆可以在任何情况 下自主驾驶,无需驾驶员的干预和操作。
公共出行
01
02
03
智能公交
通过智能化技术改造公交 车,实现实时监控、路线 规划、自动报站等功能, 提高公共交通服务水平。
共享单车
利用智能化技术管理共享 单车,实现车辆的定位、 预约、租借等功能,方便 市民出行。
智能出租车
通过智能化技术改造出租 车,实现预约、支付、评 价等功能,提高出租车服 务质量和效率。
无人驾驶出租车
无人驾驶技术
利用先进的传感器、计算机视觉等技术实现车辆的自主驾驶,提 高行驶安全性和舒适性。
远程监控与控制
通过远程监控与控制系统,实现对无人驾驶出租车的实时监控和远 程控制,确保行驶安全。
无人驾驶出租车运营模式
探讨无人驾驶出租车的运营模式,包括车辆调度、路线规划、收费 标准等,为实际运营率、人权等价值问题是关 键。
全国飞思卡尔智能车大赛观点组排名
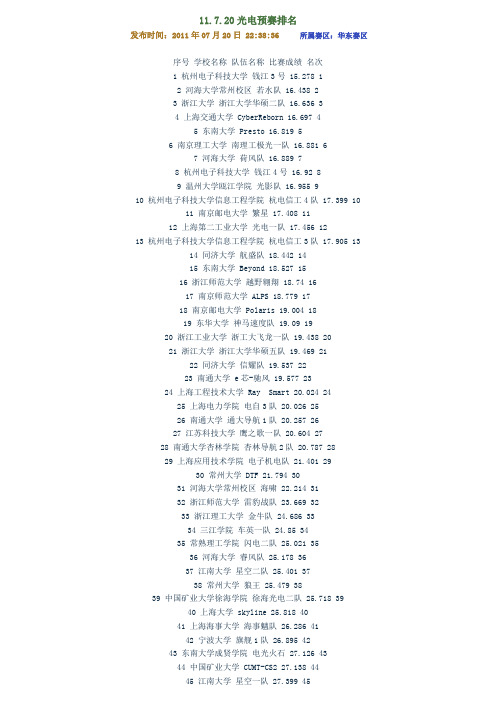
11.7.20光电预赛排名发布时间:2011年07月20日 22:38:36 所属赛区:华东赛区序号学校名称队伍名称比赛成绩名次1 杭州电子科技大学钱江3号 15.278 12 河海大学常州校区若水队 16.438 23 浙江大学浙江大学华硕二队 16.636 34 上海交通大学 CyberReborn 16.697 45 东南大学 Presto 16.819 56 南京理工大学南理工极光一队 16.881 67 河海大学荷风队 16.889 78 杭州电子科技大学钱江4号 16.92 89 温州大学瓯江学院光影队 16.955 910 杭州电子科技大学信息工程学院杭电信工4队 17.399 1011 南京邮电大学繁星 17.408 1112 上海第二工业大学光电一队 17.456 1213 杭州电子科技大学信息工程学院杭电信工3队 17.905 1314 同济大学航盛队 18.442 1415 东南大学 Beyond 18.527 1516 浙江师范大学越野翱翔 18.74 1617 南京师范大学 ALPS 18.779 1718 南京邮电大学 Polaris 19.004 1819 东华大学神马速度队 19.09 1920 浙江工业大学浙工大飞龙一队 19.438 2021 浙江大学浙江大学华硕五队 19.469 2122 同济大学信耀队 19.537 2223 南通大学 e芯-驰风 19.577 2324 上海工程技术大学 Ray Smart 20.024 2425 上海电力学院电自3队 20.026 2526 南通大学通大导航1队 20.257 2627 江苏科技大学鹰之歌一队 20.604 2728 南通大学杏林学院杏林导航2队 20.787 2829 上海应用技术学院电子机电队 21.401 2930 常州大学 DTF 21.794 3031 河海大学常州校区海啸 22.214 3132 浙江师范大学雷豹战队 23.669 3233 浙江理工大学金牛队 24.686 3334 三江学院车英一队 24.85 3435 常熟理工学院闪电二队 25.021 3536 河海大学睿风队 25.178 3637 江南大学星空二队 25.401 3738 常州大学狼王 25.479 3839 中国矿业大学徐海学院徐海光电二队 25.718 3940 上海大学 skyline 25.818 4041 上海海事大学海事魑队 26.286 4142 宁波大学旗舰1队 26.895 4243 东南大学成贤学院电光火石 27.126 4344 中国矿业大学 CUMT-CS2 27.138 4445 江南大学星空一队 27.399 4546 上海交通大学 CyberFlash 27.423 4647 扬州大学广陵学院 Thunder队 27.908 4748 中国矿业大学徐海学院徐海光电一队 28.009 4849 常州大学怀德学院光电二号 28.067 4950 常州大学怀德学院光电一号 28.641 5051 华东理工大学华理光电 29.812 5152 上海理工大学上理机光 29.986 5253 上海电力学院计信1队 30.333 5354 上海大学 speedsky 30.406 5455 上海工程技术大学机械工程队 30.554 5556 浙江大学宁波理工学院迅雷极限风 30.908 5657 扬州大学智华队 31.267 5758 上海应用技术学院新知队 31.937 5859 扬州大学猛虎队 32.151 5960 苏州大学 E-shock 32.164 6061 常熟理工学院闪电一队 32.174 6162 三江学院三电二队 32.642 6263 盐城工学院铁军队 33.048 6364 徐州工程学院徐工光电二队 33.057 6465 浙江大学城市学院晨光2队 33.335 6566 中国计量学院小牛队 33.86 6667 南京农业大学南农向前2队 34.087 6768 浙江科技学院蜗牛队 34.994 6869 浙江工业大学之江学院金叹号 36.664 6970 浙江海洋学院东海科学技术学院飙风队 37.979 7071 无锡科技职业学院和谐车队 38.506 7172 盐城工学院驰翔队 38.956 7273 浙江科技学院 JT Engine (二) 38.963 7374 上海电机电机光电组 40.285 7475 南京信息工程大学 ucSmart 40.346 7576 杭州师范大学“光电1”队 40.958 7677 南京信息工程大学 Nuist guangdian2 42.999 7778 南通大学杏林学院杏林1队 46.058 7879 徐州工程学院徐工光电一队 56.938 7980 浙江大学城市学院晨光1队 58.786 8081 南京工程学院 FS 补赛成功 8182 东南大学成贤学院光之舞补赛成功 8283 南京师范大学阿尔法 120 8384 宁波大学旗舰2队补赛成功 8485 华东理工大学华理二队 120 8586 上海第二工业大学光电二队 120 8687 浙江工业大学飞龙二队补赛成功 8788 浙江理工大学飞马队补赛成功 8889 金陵科技学院探索者3队补赛成功 8990 浙江大学宁波理工学院波理工学院1989 补赛成功 9091 中国矿业大学越崎队 120 9192 苏州大学干将队 120 9293 嘉兴学院南湖学院漫步者 120 9394 上海海事大学海事魉队 120 9495 南京工程学院音暴ZMC 补赛成功 9596 中国计量学院小兔队 120 96。
智能汽车自动驾驶的控制方法分析

能智造与信息技术智能汽车自动驾驶的控制方法分析王相哲(电子科技大学四川成都611730)摘要:自动驾驶汽车科技属于一类运用人工智能、视觉技术、雷达监控等科技完成无人驾驶的智能汽车把控科技,可以依照道路状况,自动对车辆开展运作,进一步打造高效合理的控制方式。
但是在当前,受到传感设备及把控体系等要素的制约,当前所运用的汽车自动驾驶科技还存在一定的缺陷。
例如,出现自动驾驶汽车故障而导致事故出现的案例,便是把控体系对危险认知不清的缘故造成的。
因此,对智能汽车自动驾驶的控制方法进行分析,具有重要的实践意义。
基于此,本文对智能汽车自动驾驶的控制方法进行研究,以供参考。
关键词:智能汽车自动驾驶现状分析控制方法中图分类号:U463.9文献标识码:A文章编号:1674-098X(2022)02(b)-0136-03随着我国社会经济快速发展,国民的生活水平显著提升,对汽车的需求逐年激增。
现如今,各大车企对于中国市场的竞争愈加激烈,呈现了电动化、网联化、智能化、共享化的“新四化”发展趋势,“互联网+汽车”模式逐渐兴起,智能汽车受到广泛关注。
可以预见,未来的一段时间内,智能化将是汽车行业发展的着力点和风向标[1]。
本文就智能汽车中如何实现自动驾驶控制方法进行分析,旨在提高公众对自动驾驶技术的了解。
1汽车自动驾驶的相关概述1.1研究背景近年来,自动驾驶科技从观念策划之间向现实运用层次稳步过渡,也有很多公司及员工加入到自动驾驶科技的探究进程中来。
自动驾驶概念出现已久,但是自动驾驶行业却鲜为人知。
20世纪80年代,无人车Naclab-1首次完成无人驾驶实验,之后,该型号车辆被运用在厢式货车上开展探究,无人车道路试验的相关法律如雨后春笋般出现。
之后,针对自动驾驶的探究渐渐走入大众视野。
2009年,自动驾驶汽车的照片广为流传,自动驾驶开始受到注重。
结合计算机工作的稳固性质及高科学性,能够与自动驾驶科技开展一定的结合,并进一步缩减由于驾驶因素引起的事故数量,与之相结合的车辆和基本设备互联科技也会经过车云交互,进一步缩减交通堵塞的状况出现。
第十一届智能车技术报告_上海交通大学
第十一届“恩智浦”杯全国大学生智能汽车竞赛技术报告学校:上海交通大学队伍名称:思源致远参赛队员:张兆瑞郭恒于欣禾带队教师:王冰王春香目录目录 (V)第一章引言 (2)1.1摘要 (2)1.2章节安排 (2)第二章整体方案设计 (3)2.1车体结构 (3)2.2硬件电路 (3)2.3控制算法 (3)第三章机械结构 (4)3.1车模重心调节 (4)3.2编码器安装 (4)第四章电路设计 (5)4.1总述 (5)4.2电源模块 (5)4.3主控模块 (6)4.4驱动模块 (6)4.5PCB图绘制 (7)第五章算法设计 (8)5.1概述 (8)5.2赛道识别算法 (8)5.3速度控制算法 (8)第六章总结 (10)第七章主要技术参数 (11)第一章引言1.1摘要全国大学生智能汽车竞赛至今已举办十届,通过十年间全国各地参赛队员的不断探索,较为传统的光电组已经形成了一套较为完整的体系,各类识别及控制算法均已较为成熟。
本设计为“恩智浦”杯第十一届全国大学生智能汽车竞赛的循迹行驶的方案,赛题组别为光电组。
本文主要介绍了从方案设计到硬件制作最后控制算法实现的过程,整个系统涉及硬件电路设计、控制方案、整车机械架构等多个方面。
最后通过长期的算法改进及参数调试测试了方案的可行性,并提升了控制算法的鲁棒性及整套系统的稳定性。
1.2章节安排在本文中,将详细介绍机械设计、硬件电路及软件设计的调试与实现过程。
其中机械设计包括重心调节以及各部分的安装等影响,硬件电路则包括各个子模块的功能、设计与实现。
而算法部分则系统的讲述了车模信息的采集、路径处理算法、舵机和电机控制策略等。
其中,第一章是讲述了智能车竞赛的背景和本文章节安排;第二章讲述了车模的整体设计;第三章分析硬件结构对于小车的影响;第四章是从各模块出发,详细讲述了硬件电路各部分功能;第五章讲述了车模的软件算法设计从基础训先控制和速度算法控制两个方面;第六章项目总结;第七章是车模的主要技术参数。
华为杯第十一届中国研究生电子设计竞赛华东赛区初赛结果

中国计量大学
软土地基沉降自动监 测仪
Robot 一号队 未来世界队 同济绿野追风队
曙光科技 蒙学故事绘 量大智能车队 精密探测队
一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖
基于 stm32 的语音和姿 中国科学技术大学 态控制无线视频智能
小车
科岛电设
中国矿业大学 智能手腕体温检测仪
动气象站
基于停车场的自主路 南京信息工程大学
径规划导航系统
南京邮电大学
基于全局 CNN 和 SVM 的 视频分析系统
南京邮电大学
基于自组网的群智感 知系统
南京邮电大学
基于心音 HRV 理论的精 神压力分析系统
南京邮电大学
基于视频监控的智慧 云停车系统
南通大学
基于无线通信的智能 消防侦察救援系统
海之眼 南理鹰眼
Walkman 疾风
ECNU-射频通信 优雅电子人
一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖
华东师范大学
基于 FPGA 的新型安全 网关
江苏大学
多频太赫兹探测器芯 片
江苏大学
基于微流控生物芯片 的作物真菌病害检测
系统
江苏科技大学
船舶水下结构检测与 维护机器人控制系统
损检测系统
基于 UWB 的微型四旋翼 南京航空航天大学
跟踪系统
汽车智能防撞雷达与 南京航空航天大学
报警系统设计与实现
NetGap 太赫兹芯 江苏大学致远队 扬帆 Group
搏穹 追梦队 CITE323D nuaamicrowave
HIGH 飞豹 小小四轴 Road Guard
一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖 一等奖
杭州电子科技大学_钱江1号队(光电组)_技术报告

技 术 报 告
学
校:杭州电子科技大学
队伍名称:钱江 1 号队 参赛队员:谢文球 带队教师:高明煜 居正 陈龙 李武军
-1-
关于技术报告和研究论文使用授权的说明
本人完全了解第五届“飞思卡尔”杯全国大学生智能汽车邀请赛关保 留、 使用技术报告和研究论文的规定, 即: 参赛作品著作权归参赛者本人, 比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作 品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内 容编纂收录在组委会出版论文集中。
4.4 舵机摆头与打角子程序设计 .................................................................- 24 4.4.1 随动舵机控制程序设计 ..............................................................- 24 4.4.2 前轮舵机 PD 打角控制程序设计 ...............................................- 25 4.5 速度控制子程序设计 .............................................................................- 26 4.5.1 速度的给定 ..................................................................................- 26 4.5.2 速度 PID 控制 ..............................................................................- 26 4.6 软件部分总结 .........................................................................................- 26 第五章 开发工具、制作、安装、调试过程说明 ..............................................- 29 5.1 Codewarrior IDE 的安装与使用 .............................................................- 29 5.1.1 工程的创建 ..................................................................................- 29 5.1.2 程序源代码的编辑、编译与链接 ..............................................- 31 5.1.3 BDM 调试 .....................................................................................- 31 5.2 现场调试 .................................................................................................- 33 5.3 调试中遇到的问题及解决过程 .............................................................- 34 5.3.1 高速舵机问题 ..............................................................................- 34 5.3.2 光点宽度问题 ..............................................................................- 34 第六章 车模技术参数说明 ..................................................................................- 35 6.1 车模主要技术参数 .................................................................................- 35 6.2 机械部分其它参数 .................................................................................- 35 6.3 电路中芯片的种类及数量 .....................................................................- 35 6.4 其它技术参数 .........................................................................................- 36 6.5 设计过程中用到的主要软件工具 .........................................................- 36 第七章 总结 ..........................................................................................................- 37 致 谢 ..............................................................................................................- 39 参考文献 ................................................................................................................- 40 附录 B 车模系统 C 语言源程序 ....................................................................................
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1. 线性 CCD 的固定和安装 .......................................................................................... 16 3.1.1 线性 CCD 固定与底座改装 .................................................................................. 16 3.1.2 线性 CCD 与支撑杆之间的安装 ........................................................................ 16 3.1.3 支撑杆与底盘之间的安装................................................................................... 17
This paper introduces the our smart car control system hardware and software structure and development process, the entire intelligent car involves the mechanical adjustment models, sensor selection, signal processing circuit design, control algorithm optimization and many other aspects. The working principle of the whole car is to extract the corresponding control cycle of car time slice, the corresponding time slice is used to control the balance of the body, leaving time slice is used to control speed and steering, from CCD camera in the track information to the mainboard LM1881 signal separation, and delivery information of the separated into single chip microcomputer, again by MCU read signal analysis and processing, using our own software program to extract and choose the best path of the track information, through the accurate control of the motor so as to realize the car on the track fascinating pretty fast!
Key words: car Freescale intelligence, MK60DN512ZVLQ10, CCD camera, PID control, memory, the c # upper machine,
4
目录
第一章 引 言.....................................................................................................7 第二章 系统硬件电路设计 ...............................................................................8
文中介绍了本次我们的智能车控制系统软硬件结构和开发流程,整个智 能车涉及车模机械调整,传感器选择,信号处理电路设计,控制算法优化等 许多方面。整辆车的工作原理是先将小车的控制周期中提取出相应的时间片, 相应的时间片用来控制车体的平衡,留下的时间片用来控制速度和转向,由 CCD摄像头采集赛道信息至主板的LM1881进行信号的分离,并递送分离后的信 息到单片机,再由单片机读取信号进行分析处理,运用我们自己的软件程序 对赛道信息进行提取并选择最佳路径,通过对电机的精确控制从而实现小车 在赛道上精彩漂亮的飞驰!
参赛队员签名:陈 杭、张宇彤、王 吉
带队教师签名: 陈 龙、高明煜
日
期:
2016/08/12
2
摘要
本文介绍了杭州电子科技大学的队员们在准备此次比赛中的成果。本次 比 赛 采 用 大 赛 组 委 会 提 供 的 1:16 仿 真 车 模 , 硬 件 平 台 采 用 带 MK60DN512ZVLQ10单片机的K60环境,软件平台为Keil开发环境。
In order to further improve the stability and speed of the car at run time, our group in the aspect of software USES the multiple sets of scheme comparison. Update the SD card technology real-time information storage track. Hardware to stabilize, the relatively stable solution before, but in the power part of the adjustment, makes the vehicle power supply margin larger, stronger robustness hardware. For a better analysis of the shunting data, we inherit and improve the previous PC, a new PC software written in c # program to adjustment of the models, greatly improve the efficiency of shunting. After a lot of practice, it shows that our system design scheme is feasible completely.
为了进一步提高小车在运行时的稳定性和速度,我们组在软件方面使用 了多套方案进行比较。更新了SD卡 技术实时存储赛道信息。硬件上为了稳 定的考虑,采用了以前比较稳定的方案,但是在电源部分做了调整,使得整 车的电源裕度更大,硬件鲁棒性更强。为更好的分析调车数据,我们继承并 且改进上届的上位机,用C#软件编写了新的上位机程序来进行车模调试,很 大程度上提高了调车效率。在进行大量的实践之后,表明我们的系统设计方 案完全是可行的。
关键字:飞思卡尔智能车,MK60DN512ZVLQ10,CCD摄像头,PID控制,存储器, C#上位机
3
Abstract
This paper introduces the Hangzhou Dianzi University players in preparation for the achievements in this match. The game USES the competition committee provided for simulation models, MK60DN512ZVLQ10 microcontroller hardware platform using belt K60 environment, software platform for the Keil development environment.
2.1. 硬件电路整体架构框图............................................................................................... 8 2.2. 单片机外围电路设计............................................................................................... 9 2.3. 电源部分电路设计................................................................................................. 10 2.4. 电机驱动电路设计..................................................................................................... 12 2.5. 小车调试模块.......................................................................................................... 13 2.6. 主板电路设计............................................................................................................. 14 2.7 硬件电路部分总结.................................................................................................. 15