卫星编队飞行相对绕飞控制策略
编队飞行卫星高精度自主相对定轨研究
实 现环绕星相对轨道的 自主确定 , 最后结 合模拟 的轨道数 据和 量测数 据进 行了仿真和分析 , 真结 果表 明定轨精 度 比使用 C 仿 — w 方程提高一个数量级 , 明了这种 导航方案 的有效性 。 说
线, 在许多应用领域体现 出明显 的优 势。
卫星编队飞行相对轨道 自主确定作为实现 队形保持 和控制 的前提 , 是编 队任务必须解决 的关键技术 之一 , 已有学者在此方 面做 了大量的工作 , 主要有利用 G S的半 自主导航方 案 J 以 P , 及基于类 G S P 技术 j 、 于星 间相对位 置 测量 的 自主 导航方 ቤተ መጻሕፍቲ ባይዱ基 J 案 J 。但 是 目前 , 编队 飞行 自主相 对 定轨 中 , 在 对卫 星相 对 运 动的描述 形式 一 般 为 CW 方 程 , 仅 适用 于 中 心星 轨道 为 圆 — 它 形 、 间距远远小于 中心 星轨道半 径且 忽略各种 摄动影 响 的情 星 况 , 以由于模型 的误差 , 所 导致定轨结果不准确 。本研究利用相 对位 置和相对 速度与 轨道 根数差 的关 系 , 根据 文献 [ ] 出 的 7得 相对运动方程解析 表达 式来描述 卫星 编队相 对运动 , 此方 程 可 以方便地 引入摄动影 响 , 适用于 中心卫 星是椭 圆轨道 的编 队 也
●
p ru b t n I trs tl t itn e me s r me t s w l a re tt n me s r me tae c o e so s ra in if r a in a d t e e r a i . ne — ae i d s c a u e n e l s o in ai a u e n r h s n a b e v t n o t o le a a o o m t , n h o r lt e o btsae s i t n i a h e e h o 【 n e tn e a ma l rd sg . u r a i lt n i u tae h t e p e eai r i t ts e t v ma i s c iv d t r u h a x e d d K o g l n f t e in A n mei l smuai l srt st a r — i e c o l h t
圆轨道串行卫星编队的相对运动研究
26 O 0 年1月 0
第 5 期
—
中 国 空 间 科 学 技 术
TECH N OLOGY NES PACE S ENCE AND ES CI CH I
—
圆轨道 串行卫 星编 队的相对运 动研 究
雪丹 曹喜 滨 吴云华
( 尔 滨 工 业 大 学 卫 星 技 术 研究 所 ,哈尔 滨 1 0 8 ) 哈 50 0
主题 词 编 队飞行 相 对 运动 导航 圆轨道 卫星
1 引 言
编 队卫星 是近 年来 兴起 并受 到航 天 界普遍 关注 的一 个新 的 研究领 域 ,这 种 由若 干颗 小卫 星以分
布式 方式 构成 的 “ 虚拟 卫 星” 传统 大卫 星 相 比 ,具 有 巨大 的 口径 或 测 量 基 线 ,在 电子 侦察 、立 [与 1
利 用 星间距 离 、方位 测量 信 息 ,设计 扩展 卡尔 曼滤 波器 进行 相对 轨道 状 态确定 。
2 基 础 方 程
2 1 参考 坐标 系 .
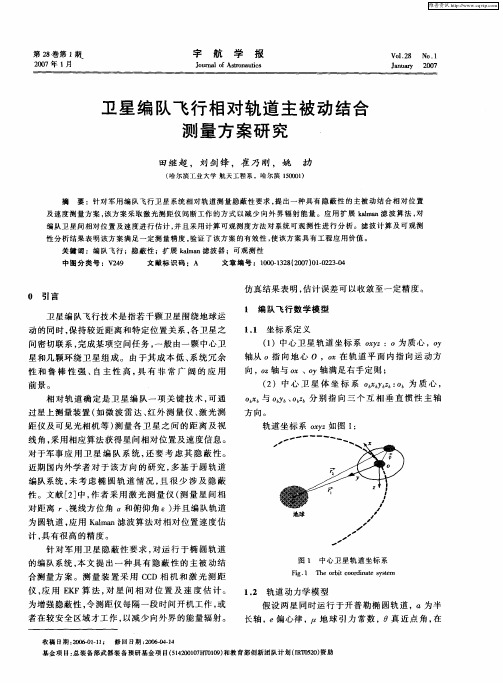
采 用相 对位 置 和相对 速度 描 述卫 星之 间 的相对 运动 规律 时 ,将运 行在 近 圆轨 道 的卫 星称 为主 卫 星 ,主卫 星附近 运动 的卫 星称 为从 卫 星 。参考 坐标 系 的定义 如下 :原 点在 主 卫 星质 心 ,z轴 沿主 卫 星 的矢径 方 向 , 轴沿轨 道 运动 角动 量 的方 向 ,. 与 z轴 和 轴 构成 右 手坐 标系 。 y轴
体成 像 、精确定 位 等方 面体 现 出明显 的优 势 。 目前对 于编 队卫 星 的研究 主要 围绕几 项关 键 技术 展 ]
开 :卫星 问相 对运 动规 律 的描述 ,相 对轨 道 和姿态 的 自主 以及 编 队队形 的保持 与 控 制 。 利用 相对 轨道 坐标 系 内的笛 卡 尔坐标 对卫 星 编队相 对运 动 进行 描述 ,可直 观表示 相 对位 置 、速
编队卫星相对运动描述方法综述
关 键 词 :卫 星 编 队 飞 行 ;相 对 运 动 ;运 动描 述 ;轨 道要 素
中 图 分 类号 :V 1 .1 4 2 4 文献 标 识 码 : A 文章 编 号 :0 0 12 (0 8 0 6 90 10 .3 0 0 1 2 2 08. 6.0 : 0. 8 / is 1 0 — 3 8.0 0 02
( 清华 大 学 航 天 航空 学 院 ,北 京 10 8) 004
摘
要 :对 于 近 地轨 道 卫 星 编 队 飞 行 的相 对 运 动 理论 研 究 , 以 采 用 的方 法 包 括 直 角 坐 标 法 和 轨 道 要 素 法 。 可
利 用 直 角 坐标 法 得 到 的 相 对运 动 动 力 学 方 程 可 以用 于 编 队 队 形 控 制研 究 , 道 要 素 法 能 够 给 出 相 对 运 动 的 运 动 学 轨
描述 问题 , 中既包 括编 队整 体运动 , 其 也包括 成员 间
的相对运 动 。运 动 描 述是 编 队设 计 、 队形 保 持 和控 制等关键 技术 的基 础 , 的描 述 方法 应 便 于说 明编 好 队构 形特征 ( 即成 员间 的相 对 运 动 ) 同时易 于 考虑 , 摄动 与外加 控制对绝 对运动 和相对运 动 的影 响 。关 于卫星绝 对运 动描 述 的研 究 已较 为 成熟 , 主要 采用
采 用 直角 坐标 法描 述 星 间相 对运 动规 律 , 得到
的动力学 方程便 于 进行 编 队 队形 控 制研 究 , 不适 但
合用 于编 队卫星 的轨 道设计 。
键 技 术 主 要 包 括 队 形 设 计 及 初 始 化 、 对 轨 道 和 姿 相
态确定 、 队形保持 和重构 。 主从 式构形 在 近地 轨道卫 星编 队飞行 中较 为 常用 , 确立 一颗卫 星为 主星( 也可仅 为虚参 考点 ) 其 ,
卫星编队飞行相对轨道主被动结合测量方案研究
仿真 结果 表 明 , 估计误 差 可 以收 敛至 一定精 度 。
1 编 队飞行 数 学模型
1 1 坐标 系 定义 . ( )中心卫 星 轨 道 坐标 系 oy 1 xz:0为 质 心 ,o y
轴从 0指 向地 心 0 ,O 轨道 平 面 内指 向运 动 方 X在
向,2 与 O o 0轴 , X、 y轴满 足 右手定 则 ; ( )中 心 卫 星 体 坐 标 系 OXy : 为 质 心 , 2 b 0 OX 与 oy 、 b b b O7 别 指 向三 个 互 相 垂 直 惯性 主 轴 , 分
为增 强隐 蔽性 , 令测距 仪 每隔 一段 时间开 机工 作 , 或 者在 较安 全区 域才工 作 , 以减少 向外 界 的能量 辐射 。
牧 稿 日期 :060—1 修 回 日期 :06 )- 20 -11; 20 441 4
12 轨道 动 力学 模 型 .
假 设 两星 同时运 行 于开 普勒 椭 圆轨 道 ,o为 半
r = +
+ 一( +2 ;)+ :d 2 告 ) ,
h
+
告 z:d 寻 :
hi
;
() 1
a =一 ac n y x rt ( / )+ a
() 4
e: aci( / rs z n
、 、
)+
其 中 :( Y z 为相 对 位 置 矢 量 ; d , d ) 相 , , ) ( d ,
对于 军事 应 用 卫 星 编 队 系 统 , 要 考 虑 其 隐 蔽 性 。 还
近期 国 内外 学者 对 于 该 方 向 的研 究 , 基 于圆 轨道 多 编 队系统 , 考 虑 椭 圆 轨 道 情 况 , 很 少 涉 及 隐 蔽 未 且 性 。文献 [ ] , 者采 用 激 光 测 量 仪 ( 量 星 间相 2中 作 测
卫星编队

1、techsat-21计划AFRL(空军研究实验室)于1998年提出了techsat-21计划旨在开发通过卫星编队飞行构成分布式雷达的相关技术。
为具有探测缓慢移动的车辆的能力,通常的做法是利用窄长天线产生窄波束去照射目标,对于相对于地面高速飞行的近地轨道卫星而言,要求天线的直径要达到几十米甚至数百米才行。
分布式雷达可以完成这一任务:每颗卫星发射一种与其它卫星的信号正交的信号,同时接收监测编队中所有卫星所发射信号(包括它自己发出的信号的回波信号),通过对干涉响应分别进行采样,可以提供求解地面移动目标所需的额外信息。
目前,该项计划正在如下领域展开基础研究:稀疏孔径信号处理、微推进、编队飞行、协同控制、空间电离层影响和航天器微型机电系统。
正在开发的技术集中于轻质量、低成本的微小卫星,特别是对协作编队有重大影响的技术,如精确差分定位、星间距离修正和通信、大容量能源系统、轻质量固态相控阵天线列、微推进、先进电子包、多功能结构和先进热控制。
最终计划是进行微小卫星近距离编队飞行试验,用于演示验证分布式卫星系统的技术可行性,分析在空间或从空间完成多种任务的潜在能力。
对于编队飞行技术的研究最早是在美国开始的。
早在1995年,美国空军科学研究办公室(Air Force Office of Scientific Research,AFOSR)发起了对分布式小卫星完成空间任务的技术挑战和优势的探索。
1997年美国空军实验室(Air Force Research Laboratory,AFRL)明确了分布式小卫星的空间任务,并于1998年提出了techsat-21计划,其目的是为了研究分布式小卫星系统中的各个技术难点,发展空间虚拟卫星技术。
techsat-21计划采用空基雷达作为有效载荷,通过实时地提供GMTI(ground moving target indication)和SAR(synthetic aperture radar)数据,进行雷达成像。
小推力下卫星编队的非自然构型设计与控制
控制 问题
, 献[ 文 5—8 采 用 了 C W 方 程来 研 ] —
究 近距 离 卫星 编 队非 自然 构 型 的 控 制 , 型 的 控 制 典 方 法 有 L R 方 法 、 yp n v方 法 ; 献 [ Q L au o 文 9—1 ] 2
直 接采 用 二体运 动 微 分 方 程 作 为 基 本运 动方 程 , 采
关 键 词 :小 推 力 ;非 自然 构 型 ;圆 形 绕 飞 ;P D控 制 ;直 接 法 中 图 分 类 号 :V 1 . 424 文 献 标 识码 :A 文章 编号 :10 — 2 ( 0 1 0 .9 8O 00 1 8 2 1 )91 1 一 3 7
DO I:l 3 73 .s n.1 00—32 2 I 0 0 0. 8 /i is 0 1 8. 0l . 9. 08
0 3 比冲恒定 为 3 0 s . N, 意 图。 设 主 星 位 于 假 不 加控 制 的 自然 轨道 上 , 过对 从 星施 加 控 制 实现 通 编 队构 型 的控 制 , 主从 星在 坐标 系 O Z 中的运 动 XY
方 程
卫星 编 队构 型可分 为 自然 构型 和非 自然 构 型两
为 2. 26 5 5~ 3 mN, 比冲 1 0 4 9 s 它 的连续 作 用 4 0— 10 ,
时 间能够 达 到 3 7 0 . 5Xl4小 时 , 大 推 力的 扩 展指 最 标 能够达 到 3 9 N。本 文 采 用 的 小 推 力 发 动 机 以 8m 上 述 N X 发 动 机 为 原 型 , 定 最 大 推 力 幅 值 ET 给
第 3 2卷 第 9期
21 0 1年 9月
宇 航 学 报
J ur a fAsr na tc o n lo to u is
【国家自然科学基金】_编队卫星_基金支持热词逐年推荐_【万方软件创新助手】_20140731
科研热词 编队飞行 编队卫星 辐射计效应 碰撞规避 卫星编队飞行 队形重构 通信时延 相对姿态 相对位置 模糊函数 对偶四元数 卫星编队 协同控制 内编队 伪谱法 高斯分布 验证质量 飞秒 雷达成像 阻尼作用 选择控制策略 输出反馈 轨道动力学 轨迹规划 轨迹控制 误差分析 视线测量 自适应控制 自主性 腔体半径 耦合模型 编队飞行卫星 编队小卫星 组合系统 线性调频信号 线性化 纯引力轨道 类gps 磁偶极子 相对运动 相对控制 相对导航 相对位姿 电离层模型 电磁编队飞行 滑模控制 测距 气浮平台 气体阻尼 残余气体 正交码分 模糊度解算成功率
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
科研热词 编队飞行 卫星编队飞行 运动描述 轨道要素 自适应ukf 绳系卫星 相对运动 相对轨道 相对姿态 电离太阳帆板指向 增强型 双频gps 双差 卫星 动力学和控制 伪线性化 仿真
科研热词 编队飞行 速度增量 星间链路 卫星编队飞行 高精度相对位置保持 高斯伪谱法 非凸优化 队形重构 队形保持 连续有限推力 连续小推力 输出反馈控制 输出反馈 轨道动力学 视线测量 航天器设计 自主定轨 耦合动力学 编队小卫星 编队卫星 绳系卫星编队 线性变参数 碰撞规避 相对定位 相对姿态控制 直接配置法 直序扩频 燃料最优 混合整数线性规划 椭圆轨道 星敏感器 无主星编队 整数规划 摄动 控制输入饱和 悬停轨道 快速绕飞 微小卫星 循环协同控制 平动点周期轨道 姿态控制 多项式特征结构配置 卫星观测调度 卫星编队 卫星星座 动力学仿真 分支定界 分布式 凸包理论 ttdpn建模 petri网 kbr
与非合作目标编队的相对姿态控制
x y z α α 其中 : α 1 = | r| , 2 = | r | , 3 = | r| 。
( 8)
得到误差四元数后 ,因为目标在运动 , 相对姿态 在变化 , 为了提高跟踪精度还需要计算误差角速度 。 根据星体运动学有 :
qv = �
其中 , J 为星体转动惯量矩阵 , ω 为绝对角速度 , u 为控制力矩 , � u 为环境干扰力矩 。运动学公式
中图分类号 : V412 文献标识码 : A 文章编号 : 100021328 (2007) 0521210205
0 引言 卫星编队飞行最初是由美国空军和 NASA 提出 的
[1 ]
它要紧紧的锁定目标。 该问题可以描述为主从卫星编队的相对姿态控 制问题 。非合作目标可以看成主卫星 , 从卫星姿态 跟踪锁定主卫星 , 相当于主卫星为从卫星提供了期 望姿态。因此与非合作目标编队的相对姿态控制问 题可以描述为两个问题 :从星期望姿态计算和期望 姿态跟踪控制器的设计 。 1 相对姿态的计算 为方便讨论 , 上面讨论的相对姿态控制问题描 述为 :在编队飞行过程中卫星 2 的 X 轴总是指向目 标 1 , 卫星 2 是受控的 ,目标 1 为非合作目标 。 卫星 2 的体坐标系 OXb Yb Zb , 考虑到测量设备 比如无线电测距设备固定安装在星上 , 设目标 1 在 该坐标系的位置为 r ( x , y , z) 。为了使 X 轴指向 目标 , 卫星 2 需要进行姿态跟踪 , 误差姿态四元数为
收稿日期 : 200620420 3 ; 修回日期 :200 6209230
[4 ]
。K ang
[ 6]
研究了从星指向主星相对姿态控制问题 , 但是其方
绕某一空间轴 e 旋 转一定角度θ 后指向目标 。如 图 1所示 , Xb 按右手系旋转到 r 。 实际上误差四元数的选取不唯一 , 但是上面的 选取显然是旋转路径最短的 。则根据四元数定义 :
近地轨道小卫星编队飞行的电磁控制研究
力控 制 卫 星 编 队 飞 行 的相 对 运 动 模 型 , 计 控 制 设 律, 利用 Smun 闭环 反馈 控制 系统 进行仿 真 , i lk对 i 并
分析 系统 的收 敛性 和干 扰力 矩 的影 响 。
磁 力作 为航 天器 群 中的 内部 力 , 以进 行 航 天 器 的 可
相对 控 制 , 而不能 改 变 质 心 , 助 推 力 器 控 制 、 轮 辅 飞
控 制 , 以达到 传 统 控 制 的效 果 。电磁 力 和力 矩 的 可
产 生不 消耗 推 进 剂 , 且 电能 在 太 空 中可 以再 生 , 而
1 磁控小卫星编队飞行数学模 型
本文 研究 绕 地 球 飞 行 的 两 颗 小 卫 星 构 成 的 近
地轨 道编 队 , Hl 坐标 系 描 述 小 卫 星 编 队飞 行 的 在 i l 相对 运动 。Hi 坐标 系是 随 目标 小卫 星 一 同运 动 的 l l 动坐标 系 : 点 在 目标 小 卫 星 质 心 ,X轴 沿 地球 半 原 O 径 方 向朝外 , 轴垂 直 于 O , 向飞行 方 向 , X轴 指 并在
干扰加 速度 , 为轨道 角速 度 , 队 中小卫 星 之 间 的 编
53 76
科
学
技
术
与
工
程
1 卷 1
距 离在百 米 以 内。
g 1
参考 星 和环绕 星 分 别 安装 三 个 正 交线 圈q 2
星 与环绕 星 的 磁偶 极 子 强 度 向量 分 别 为 - ., =[ u 和 =[ ,:, ] 参 考 星 到 环绕 星 的 ] z u “ , 距 离 矢量 为 =[ yz T ,,] o则根 据 文 献 [ ] 编 队 中 6 ,
航天器路径规划与优化控制
航天器路径规划与优化控制随着科技的不断进步,航天技术也在不断发展。
目前,人类已经成功地将许多航天器送上了太空,这些航天器不仅可以为我们提供丰富的科学数据,还可以为人类探索更加遥远的空间做出贡献。
然而,对于航天器来说,如何规划路径并实现优化控制也是至关重要的。
一、航天器路径规划航天器路径规划是指在行星空间内指定一条航线,使得航天器能够在规定时间内到达指定目的地的过程。
在实际操作中,航天器路径规划通常需要考虑多种因素。
1、引力场干扰航天器在行进过程中,受到行星的引力干扰,这会改变其轨道,因此路径规划需要考虑行星的重力场和每个时刻的位置。
2、轨道互相干扰多个航天器同时在行进路径上时,它们之间的轨道互相干扰也需要被规划在内。
3、动力学影响战斗所受的阻力和推力等因素也会影响航天器的轨道,因此它们也需要被考虑进来。
4、通信影响在传输过程中,航天器之间的通信也会受到影响,尤其是在远距离传输过程中,信息的传递速度会降低,因此航天器路径规划还需要考虑通信的实时性。
5、恶劣环境考虑在行星空间中,存在大量的粒子和射线等因素,对航天器的影响需要被考虑进去,应对为行星空间中恶劣的环境。
二、航天器优化控制优化控制可以使航天器沿着正确的轨迹飞行,达到更好的控制效果。
在控制过程中,我们需要考虑以下几点。
1、控制过程在飞行过程中,我们需要对航天器进行及时的控制,避免任何飞行偏差。
控制过程必须密切考虑航天器与外部环境相互作用,使其到达它的目标位置。
2、优化设计优化设计将保证发挥最大的能量效率,它考虑了燃料消耗量、时间限制和目标达成的需要等因素。
3、环境影响在控制过程中,环境影响是必须被考虑进去的。
飞行中的一些情况,例如黑暗和辐射等都应该考虑到,并且尽量减少其影响。
4、最佳路径选择在航天器的路径选择中,我们需要选择最适合的路径,同时也考虑节省燃料,控制成本的因素,最终达到最佳的经济效益。
结论航天器路径规划与优化控制是航天领域内非常重要和实用的技术手段,它们可以为我们提供更加优质的控制体验以及创造优异的经济效益。