自动编队飞行控制
卫星编队飞行动力学与控制研究

第 2 期
孛 l 俊峰 萼 : 卫星 编 队 飞行动 力 学 与控制 研 究
卫 星 编 队 飞 行 动 力 学 与控 制研 究
李俊峰 高云 峰 宝音 贺 西 李 响 王 宗钢 王 虎 妹
( 华太 学工 程力 学与航 天航 空 系,北 京 1 0 8 ) 清 0 0 4
和 S a a C a aUnv ri a t lr iest l y合 作 研 究 的 绿 宝 石 星 座 等 . 2 0 0 0年 7月 NAS 的 E 1和 L n s t7 A O一 a d a-
两 颗 卫 星 进 行 了短 期 的编 队 飞行 实 验 (ri 内保 持 3 m 距 离 ,如 图 2所 示 ) 并 对 同 一地 点 拍 1 n a k , 摄 了照 片 当 然 这 还 不 是 真 正 意 义 上 的编 队 飞行 ,只 是 一 个短 时 间 的交 会 过 程 .在 长 期 保 持 近 距 离 编 队 飞行 还 需 要 解 决 相 对 运 动 轨 道 动 力 学 与 控 制 、 队 形 重 构 、相 对 摄 动 等 很 多 问题 .
态动 力学与控制、 充液 卫星晃动 动 力学.
摘 要 简 要介 绍 了卫 星编 队 飞行 的 动 力学 与控 制 研 究 的最 新进 展,对 今 后研 究 工 作 的重 点提 出 了 建 议. 关键 词 卫星 编 队 飞行, 动力 学 与控 制, C- - l 方程 .轨 道根 数法 W Hi l
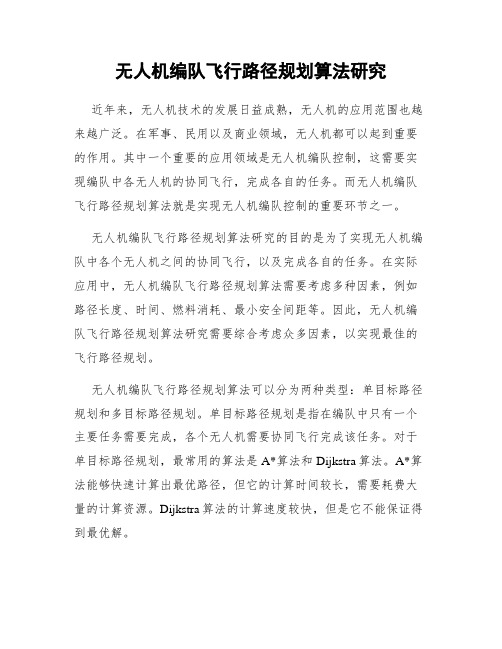
图 L 分 布 式 雷 达 卫 星
图 2 3 1和 La d 一 10- n s 7编 队 飞行 蛮 验
提 到 卫星 编 队 飞行 ,容 易 让 人 联 想 到 卫 星 组 网和 飞 机 编 队 飞行 .卫 星 编 队 飞 行 与 卫 星 组 网 有 较 大 的不 同,卫 星 组 网 主 要 考虑 是 对 地 面 区域 的 覆 盖 问题 ,组 网卫 星 的 轨 道 设 计 与 单 颗 卫 星 差 不 多 .卫 星 编 队 飞行 的研 究 重 点 是 如 何 实 现 卫 星 协 同 工 作 ,合 理 的 队 形 设 计、 精确 的 队形 控 制 是 重 要 的 物 理 保 障 ,因 此研 究 重 点 是 卫 星之 间相 对 位 置 、相 对 轨 道 的 变 化 与 控 制 问题 ,轨 道 设 计 与 单 颗 卫 星 有 很 大 差 别 .卫 星 编 队 与 飞机 编 队 有 两 点 不 同 ,一 是 卫 星 编 队 飞 行 中 要 求 队形 保持 的 时 间 很 长 ( 儿 天 到 几年 ),二 是 地 球 I 是 制 约 卫 星运 动 的 主要 因 素 ,改 变 卫 星 的轨 道 需 要 消 耗 卫星 从 力 上 昂贵 的 ’ 次性 燃 料 ,降 低 卫 星 在 轨 寿 命 .因 此 设 法 利用 卫 星 相 对 轨 道动 力 学 特性 来 减 少 燃 料 使 用 成 为 非 常 关 键 的研 究 课 题 ,卫 星 相 对 轨 道 的 动 力 学 与 控 制 正 是 研 究 这 个 问题 的基 础.本 文 就 卫 星 相 对 轨 道 的动 力 学 与 控 制 研 究 进 展 进 行 综 述 .
无人机编队飞行路径规划算法研究
无人机编队飞行路径规划算法研究近年来,无人机技术的发展日益成熟,无人机的应用范围也越来越广泛。
在军事、民用以及商业领域,无人机都可以起到重要的作用。
其中一个重要的应用领域是无人机编队控制,这需要实现编队中各无人机的协同飞行,完成各自的任务。
而无人机编队飞行路径规划算法就是实现无人机编队控制的重要环节之一。
无人机编队飞行路径规划算法研究的目的是为了实现无人机编队中各个无人机之间的协同飞行,以及完成各自的任务。
在实际应用中,无人机编队飞行路径规划算法需要考虑多种因素,例如路径长度、时间、燃料消耗、最小安全间距等。
因此,无人机编队飞行路径规划算法研究需要综合考虑众多因素,以实现最佳的飞行路径规划。
无人机编队飞行路径规划算法可以分为两种类型:单目标路径规划和多目标路径规划。
单目标路径规划是指在编队中只有一个主要任务需要完成,各个无人机需要协同飞行完成该任务。
对于单目标路径规划,最常用的算法是A*算法和Dijkstra算法。
A*算法能够快速计算出最优路径,但它的计算时间较长,需要耗费大量的计算资源。
Dijkstra算法的计算速度较快,但是它不能保证得到最优解。
多目标路径规划是指在编队中有多个任务需要完成,各个无人机需要协同飞行完成不同的任务。
对于多目标路径规划,最常用的算法是粒子群算法和遗传算法。
粒子群算法模拟“鸟群”的工作方式,通过优化每个粒子的位置,最后得到最优解。
而遗传算法则采用进化论的思想,通过模拟生物进化过程,得到最优解。
除了算法类型之外,还有其他的因素需要考虑,如路径规划的变化性、随机性、局部搜索和全局优化。
路径规划的变化性指的是应对不同情况需要改变路径规划策略,以适应实际情况的变化。
随机性指的是考虑到环境的不确定性,需要随机生成路径规划方案。
局部搜索和全局优化指的是如何在保证全局最优解的情况下,寻找局部最优解。
总的来说,无人机编队飞行路径规划算法的研究涉及多个方面,需要考虑多方面的因素。
无人机编队飞行路径规划算法的优化可以提高无人机的飞行效率和准确度,从而更好地满足实际应用需求。
无人机三维编队飞行模糊PID控制器设计
得到 运动 学 方程
=
e =k( 一 :石 )
() 9
V— + Y L wo
v
式中, 、 z为给定的编队间隔指令。 Y和
2 3 模 糊 P I 参数 的整 定 . I)
=一 w一 + + w c ● ●
=
( 4
模糊 I PD控制器 叨 巴 H叨 £ r十/ 樯 7 … J l 以偏差 的变化率为" I —¨ L 玎 启 和偏差 HX I U l f J U
21年 l 01 2月
西 北 工 业 大 学 学 报
J u a fN r w se oye h ia iest o r lo ot e tr P ltc nc lUnv ri n h n y
De . 2 1 c Ol V0 . 9 o 6 1 2 N .
第2 9卷第 6期
无 人 机 三 维编 队飞行 模糊 PD控 制器 设计 I
系图
, 结合无人机 自动驾驶仪模型 , 线性化后可
该能根据不同的任务要求变换不同的队形。本文结 合前述思想 , 将编队的几何关系引人编队飞行模型, 设计 了模糊 PD控制器 , I 实现 了编队队形的保持 , 并 能通过控制编队飞机 间的几何 间距合理变换 队形 。 仿真结果表明了控制的可行性和有效性。
(+ 一 ” 去
3
式 中 i=L, 分 别表 示长 机和僚 机 。 W 根据 图 1 示 的两架 无人 机编 队飞行 的几 何关 所
要求和飞行阶段。如执行搜索任务时采用覆盖区域 较广的菱形编队 , 执行 空战任务时采用攻击性较强
的横一字 形 编 队。 因此 , 人 机 编 队 飞行 过 程 中应 无
1 编 队飞行模型推 导
无人机编队飞行控制器设计与仿真
i n c a s e o f d i s t u r b,a n d wh e n t h e P I D p ra a me t e r s c h a n g e ,t h e c o n t r o l l e r c a n s t i l l a c h i e v e t h e g o l a o f f o m a r t i o n k e e p i n g
中 图分 类 号 : V 2 9 7 文献 标 识 码 : B
F o r ma t i o n Fl i g h t Co n t r o l De s i g n f o r UAVs
MU Bi n, ZHAO Xi a o—b e i , HUANG Yo n g
r a t e o f b a t t l e mi s s i o n,t h u s mo r e a n d mo r e r e s e a r c h e s h a v e b e e n d o n e .T h i s p a p e r b e g a n wi t h t h e c l o s e f o r ma t i o n, t a k i n g t h e l e a d e r—f o l l o we r s t r u c t u r e a n d b u i l d i n g a r o t a t i n g la f me u s i n g f o l l o we r v e l o c i t y a s X a x i s a n d i f x e d o n t h e
( C o l l e g e o f A e r o n a u t i c s ,N o r t h w e s t e r n P o l y t e c h n i c a l U n i v e r s i t y , X i ’ a n S h a n x i 7 1 0 0 7 2 , C h i n a ) AB S T R AC T: T h e f o r m a t i o n l f i g h t o f m u h i —u n m a n n e d a e i r a l v e h i c l e s( U A V s )c a n g r a t e f u l l y e n h a n c e s u c c e s s f u l
无人机编队原理

无人机编队原理
无人机编队是指将多架无人机按照一定规则组成一个整体,实现一些特定的任务。
无人机编队技术在军事、民用等领域都有广泛的应用。
无人机编队的原理主要包括以下几个方面:
1. 通信协议:无人机之间需要进行信息交换和协调,因此需要
一种有效的通信协议。
目前常用的通信协议有WiFi、蓝牙、Zigbee 等。
2. 路径规划和控制:编队中的每个无人机都需要按照一定的路
径进行飞行,这就需要进行路径规划和控制。
路径规划算法可以根据编队的任务要求,考虑无人机的速度、安全性等因素,确定每个无人机的飞行路径。
控制算法则可以根据无人机的状态,对其进行控制,使其按照预定路径飞行。
3. 集群协同:编队中的无人机是一个整体,需要实现集群协同。
集群协同可以通过无人机之间的信息交换和协调来实现。
当有无人机出现故障或失联时,其他无人机可以及时发现,并进行协同处理。
4. 避障和避撞技术:无人机编队在飞行过程中,需要避免与其
他目标物体发生碰撞,因此需要避障和避撞技术。
避障技术可以根据传感器获取的环境信息,对无人机的飞行路径进行调整,避免与障碍物发生碰撞。
避撞技术则可以根据编队无人机之间的距离和速度,判断是否存在碰撞风险,并进行相应的控制。
无人机编队技术的发展,将会促进无人机在各个领域的广泛应用。
- 1 -。
无人机编队队形保持变换控制器设计

真结果表明所设计的控制器能够有效地控制无人机编队 , 在飞行过程中可以稳定地 保持 队形 , 能根据任务 要求合理进行 并
编队 , 并无碰撞 , 为设计提供了依据 。
关键词 : 编队飞行 ; 菱形编 队; 跟随编 队; 编队保持变换
摘要 : 研究无人机编队 队形保持变换 的控制设 计 问题。 由于 控制 系统队形 跟踪 应保证 姿态 的稳定性 , 针对 两架无 人机 在 “ 长机 一 僚机” 编队结构中的左菱 形编队飞行控 制系统 , 为了有效控制 飞行 队形 , 保持 变换 , 出 了根据 编队飞行 的几何关 提 系推导编队相对运动学方程 , 结合无人机的 自动驾驶仪模型建立 了相应的编队飞行线性化数学模型。采用 PD控制方法分 I
中圈分类号 :P 7 V 7 T 2 3:2 9 文献标 识码 : B
Co t olr De i n o n r l sg fUAVsFo ma i n Ke p a d Ch n e e r t e n a g o
DENG a W ANG n—mi W ANG a W n, Xi n, Xio—y n, AO a XI Ya—h i u
t e miso e u r me t w to t o l in h si n r q i e nsi h u l s . c io KEYW ORDS: o ai n f g t Dimo d f r t n T al o ai n; o ain k e n h n e ri f r t m o l o m o F r t e p a d c a g m o
保持控制方面 , 以二 维编 队为 主 , 并 即认 为 长机 和僚机 在 同
航空器的飞行控制系统设计

航空器的飞行控制系统设计在现代航空领域,航空器的飞行控制系统设计是确保飞行安全、提高飞行性能和实现各种复杂飞行任务的关键所在。
飞行控制系统就如同航空器的“大脑”和“神经中枢”,它能够精确地感知飞行器的状态,快速地处理各种信息,并准确地发出控制指令,从而实现对航空器的稳定、精确和可靠的控制。
要理解航空器飞行控制系统的设计,首先需要了解其组成部分。
一般来说,飞行控制系统主要包括传感器、控制器和执行机构。
传感器负责收集航空器的各种状态信息,如速度、高度、姿态、加速度等。
这些传感器就像是航空器的“眼睛”和“耳朵”,能够敏锐地感知外界环境和自身的状态变化。
常见的传感器有陀螺仪、加速度计、气压高度计、空速传感器等。
控制器则是飞行控制系统的“大脑”,它接收来自传感器的信息,并根据预设的控制算法和逻辑进行计算和分析,生成相应的控制指令。
执行机构则负责将控制器发出的指令转化为实际的动作,如操纵舵面、调整发动机推力等,从而实现对航空器的控制。
在飞行控制系统的设计中,稳定性是首要考虑的因素。
一个稳定的飞行控制系统能够确保航空器在各种飞行条件下保持平衡和可控。
为了实现稳定性,设计师们需要运用各种控制理论和方法,如经典控制理论、现代控制理论等。
经典控制理论基于传递函数和频率响应等概念,适用于线性定常系统的分析和设计。
而现代控制理论则基于状态空间模型,可以处理更复杂的非线性和时变系统。
通过建立航空器的数学模型,并运用这些控制理论进行分析和设计,可以确定合适的控制参数和控制策略,以保证飞行系统的稳定性。
准确性也是飞行控制系统设计的重要目标之一。
准确性要求飞行控制系统能够精确地跟踪飞行员的指令和预设的飞行轨迹。
这就需要在系统设计中考虑各种误差源,并采取相应的补偿措施。
例如,传感器的测量误差、执行机构的响应误差、外界干扰等都会影响系统的准确性。
通过采用高精度的传感器、优化控制算法、进行误差补偿等手段,可以提高飞行控制系统的准确性,使航空器能够更加精确地按照预期的轨迹飞行。
旋翼无人机编队飞行科目

旋翼无人机编队飞行科目一、背景介绍旋翼无人机编队飞行科目是指在无人机领域中,通过多架旋翼无人机之间的协同作战,实现更高效、更精准的任务执行。
该科目涉及到多方面的技术要求和操作技巧,需要飞行员具备一定的专业知识和实践经验。
二、编队飞行基本概念1.编队飞行定义:指两架或两架以上的无人机按照特定规则进行协同飞行,以达到更高效、更精准的任务执行。
2.编队形式:包括直线型、V型、梯形型等多种形式。
3.编队距离:根据不同任务需求和环境因素,编队距离可以有所调整。
一般来说,编队距离较小可以提高精度和效率,但需要考虑安全性问题。
三、旋翼无人机编队飞行技术要点1.通信技术:在旋翼无人机编队飞行中,通信技术是非常关键的一个环节。
通过通信设备可以实现各个无人机之间的信息交流和指挥控制。
2.导航系统:导航系统可以为旋翼无人机提供精准的位置和方向信息,从而保证编队飞行的准确性和稳定性。
3.编队控制算法:编队控制算法可以对无人机进行自动化控制,从而实现编队飞行的协同作战目标。
4.安全保障技术:在旋翼无人机编队飞行过程中,需要考虑到各种不可预测的因素,如气象条件、电磁干扰等。
因此需要配备相应的安全保障技术,以确保飞行过程中的安全性。
四、旋翼无人机编队飞行科目考核要求1.基本操作技能:包括起飞、降落、悬停、转弯等基本操作技能。
2.编队组织能力:要求考生具备组织协调多架旋翼无人机进行编队飞行的能力。
3.任务执行能力:要求考生具备完成特定任务的能力,并且在完成任务过程中实现高效、精准的操作。
五、旋翼无人机编队飞行科目训练方法1.模拟训练:通过模拟软件进行虚拟仿真训练,可以帮助学员快速掌握编队飞行技术要点。
2.实际操作训练:在实际操作中,学员可以通过模拟器和真实无人机进行训练,从而逐步提高操作技能和组织协调能力。
3.集体训练:在集体训练中,多名学员可以一起进行编队飞行训练,从而更好地模拟实战环境,提高编队协作能力。
六、旋翼无人机编队飞行科目的应用领域1.军事领域:旋翼无人机编队飞行可以为军事任务提供更高效、更精准的支持,如侦察、打击等任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动编队飞行控制 M. Pachter, J. J. D' Azzo, and J. L. Dargan Air Force Institute of Technology, Wright-Patterson AFB, Ohio 45433 一 、引言 本文将讨论编队飞行控制问题,研究自动控制双机飞行,从而使其在改变航向和变速操纵过程中保持初始队形。现在看一个典型的长机/僚机“菱形”编队。(如图1)
图1-固定翼飞机旋转参考坐标系 从操作角度,并根据目前人工操纵飞机编队飞行的实际情况来看,在自动编队飞行控制中定义领航/跟随的概念是有利的。这里设想从机,即僚机,装配有‘编队保持’的自动驾驶仪,从而能用‘编队保持’自动驾驶仪来控制僚机(W)。 模拟该机为一阶动态系统,假定相对于W的长机(L)的位置可由W得出,并研发了自动编队维护的僚机控制系统。以上提及的自动编队控制系统(FFCS)被称作编队保持自动驾驶仪,由此W能够在面对L的机动飞行中保持自己相对于长机(基站保持)的位置。此外,L可以在编队参数中,例如,L-W横向纵向分离(rx,ry)上命令增量(rx,ry).这样促使编队保持自动驾驶仪控制W执行动作,从而影响被控增量。因此,从字面上看,L领导或者驱动了整个编队。 考虑由反馈得到的测量结果,W的编队位置x,y的扰动能够由W上配备的编队保持自动驾驶仪得出显得至关重要。航向误差和速度误差的附加信息,即长机-僚机航向和速度差距测量结果的可用性显著提高了编队保持自动驾驶仪的性能。 早期美国空军编队飞行控制系统的可行性研究进行与1965年,它论断FFCS能够缓解飞行员在编队飞行中的繁重压力,对编队飞行性能有极大提高。近日,Rohs已经着手FFCS的初步研究,他考虑了相似与不同飞机的菱形和雷尔编队。该工作基于Dargan等人的理论研究。在本文中,采用附着W瞬时位置的旋转参考坐标系。编队控制问题的模型是非线性动态系统,在第二三部分研究。该动态模型在初始稳定状态下线性化。一种耦合原则正在FFCS重开始使用,它能极大方便线性比例积分控制器的生成。FFCS的关键性耦合将在第四部分讨论,随之在第五部分分析x和y通道控制系统。基于分解的控制设计概念非常符合Porter和Bradshaw的模式(分解)观点的。最后,应用线性设备模型设计一个线性比例积分僚机控制器,即编队保持自动驾驶仪。第五部分的图2将阐述编队保持控制概念。编队保持自动驾驶仪的性能由长机控制的机动飞行仿真(如长机航向速度变化)来估计。此外,可以指示编队参数的变化及编队变化。第六部分给出了这些仿真结果,第七部分总结注释。
二、编队飞行控制建模 A.主要假设 在分析编队飞行控制问题时,默认假定编队中的每一架飞机自动驾驶仪是标准闭环系统。因此,飞机飞行是靠控制自动驾驶仪参考信号保持其各自的马赫数和路线。 B.飞行动力学
假定以下为两个分离的自动驾驶仪:(1)航向保持自动驾驶仪,在不影响飞机空速时,它允许在航向上存在微小的航向偏动指令c;(2)马赫数保持自动驾驶仪,再不影响飞机高度时,它允许在速度V上存在微小的速度偏移量cV。这些分离假定隐含前提为第一架自动驾驶仪油门,操纵杆,副翼和方向舵控制协调,第二架自动驾驶仪操纵杆和油门控制协调。其次,航向动力学方程及随之而来由L,W控制的速度响应是一阶的。最后,上述模型包含现实增强率非线性饱和。 (线性化)动力方程如下: 11cWW
WWW
(1)
11cWW
WWW
VV
VVV (2)
11cLL
LLL
(3)
11cLVL
LLLV
VVV (4)
方程(3)和(4)建立了长机L的自动驾驶仪系统模型,方程(1)和(2)建立了僚机W的自动驾驶仪系统模型.设想的编队飞行控制(如队形保持)自动驾驶仪要求有一个与编队紧密环绕的附加外环,该外环驱动以上提及的僚机W的标准内环自动驾驶仪,后者由cW和cWV控制。最后,队形保持闭环系统由外援输入(cL, cLV)控制。 C.运动学
考虑平面情况,采用旋转参考坐标系,以W的瞬时位置为原点,W的瞬时速度矢量WV为x轴,y轴指向W的右舷翼。因此,L相对W的位置为(x,y)。这些可由图一阐明。不是一般性,选择编队的初始静态速度向量为惯性参考系的X轴,队形位于正北,使得航向扰动。编队静态速度是nV。 由图1所示,可得L-W队形相对运动方程:
cosWWLedxyVVdt (5)
sinWLedyxVdt (6)
航向角偏差为: eLW
(7)
将W的旋转率表达式[方程(1)]带入运动方程(5)和(6)中,得:
coscWWWWLeWdxyyVVdt (8)
sincWWWLeWdyxxVdt (9)
由此,方程(1—4)及(7-9)给出了FFCS的动力学方程。注意,外援长机控制影响设备的所有状态,并由增强的动力系统(1—4)及(7-9)所描述。
三、线性化 将x,y运动方程(8)和(9)线性化并方程(7),线性时不变FFCS由方程(10),(11)以及(1—4)构成。
cWW
rrWWLW
yyxVV (10)
()cWWrrnWnLWxxyVV (11)
这里,x,y是扰动变量,例如rxxx,ryyy。相似的,LnLLVVVV,WnWWVVVV。状态矢量为(,,,,,)WWLLxyVV。
同样,在FFCS中,控制矢量是(,)ccWWV,意识到这一点很重要。此外,L控制量(,)ccLLV是FFCS(10),(11)以及(1—4)的附加外援输入,并考虑干扰信号对系统刺激,队形保持自动驾驶仪的任务是让飞机正常飞行,例如,排除这种干扰。
四、解耦 FFCS的六维状态矢量被重新分解区分如下:,,WLxVV和,,WLy。因此,一下两个动力系统,均为三维并被称为x通道和y通道,各自被包含在以下式子中: cWW
rrWLWW
yyxVV (12)
11cWW
WWW
VV
VVV (13)
11cLL
LLL
VV
VVV (14)
并()cWWrrnWnLWxxyVV (15) 11cWW
WWW
(16)
11cLL
LLL
(17)
得系统矩阵:
011001000001000000000100000100000WWLWWLrVVrnnVyAxVV
010
0001000WWWWrVryBx
,扰动输入矩阵为000010000010LLV
因此, 1112220AAAA
12BBB 1
2
00
因此分块状态向量为12(,)XX。分块矩阵为33矩阵,如下:
11011100100WLVVA
1200000000WryA
220100100WWLrnnVxVVA