高德 roadnet 参数
高德 roadnet 参数
高德 roadnet 参数高德RoadNet参数详解一、概述高德RoadNet是一种用于规划路径的算法,它基于道路网络数据,通过考虑多种因素来确定最佳路径。
本文将介绍高德RoadNet算法中的一些重要参数及其功能。
二、地图数据高德RoadNet算法的核心是道路网络数据,该数据包括道路的形状、长度、限速信息等。
这些数据是通过高德地图的数据采集车辆和用户行为数据进行实时更新的,确保了数据的准确性和实时性。
三、起点和终点在使用高德RoadNet算法进行路径规划时,需要指定起点和终点。
起点和终点可以是具体的经纬度坐标,也可以是地名或地址。
算法将根据起点和终点的位置信息来确定最佳路径。
四、交通状况高德RoadNet算法考虑了实时的交通状况信息。
在进行路径规划时,算法会根据实时交通数据来判断道路的拥堵程度,从而选择较少拥堵的道路作为路径的一部分。
这使得规划出的路径更加准确和实用。
五、道路类型高德RoadNet算法支持对不同道路类型进行区分。
道路类型包括高速公路、城市道路、乡村道路等。
算法会根据道路类型的不同,对路径进行优化,以提供更加合理的路径。
六、避让区域高德RoadNet算法支持指定避让区域。
避让区域可以是一些特定的区域,如施工区、拥堵区等。
算法会避免将避让区域包含在路径中,从而选择绕过这些区域的最佳路径。
七、路径约束高德RoadNet算法支持指定路径约束。
路径约束可以是一些特定的要求,如最短路径、最快路径等。
算法会根据路径约束的要求,选择满足要求的最佳路径。
八、导航模式高德RoadNet算法支持不同的导航模式。
导航模式可以是驾车模式、步行模式、骑行模式等。
算法会根据不同的导航模式,优化路径规划的结果,以提供更加适合不同出行方式的路径。
九、结果输出高德RoadNet算法的结果输出包括路径信息和导航指令。
路径信息包括起点、终点、途经点以及路径的距离和时间等。
导航指令则指导用户在行驶过程中的转向和行驶方式。
pure_pursuit 参数
pure_pursuit 参数PurePursuit算法是一种基于路径跟踪的控制算法,可用于实现无人车自主导航。
该算法的核心是计算车辆当前位置到路径上最近点的距离,并根据距离计算出车辆需要执行的转向指令。
在实际应用中,需要设置一些参数来调整算法的性能。
本文将介绍Pure Pursuit算法的几个重要参数及其影响。
1. 前瞻距离(Lookahead Distance)前瞻距离是指车辆在路径上所看到的未来路径的长度。
它可以影响车辆的控制精度和响应速度。
如果前瞻距离太小,车辆会频繁地转弯,导致控制不稳定。
而如果前瞻距离太大,车辆可能会过度调整方向,导致路径偏离。
因此,需要根据具体应用场景进行合理设置。
2. 路径偏移(Path Offset)路径偏移是指车辆与路径之间的距离,它可以控制车辆在路径上的位置。
如果路径偏移为0,车辆将始终沿着路径中心行驶。
而如果路径偏移为正数,车辆将偏向路径左侧行驶,反之则偏向右侧行驶。
需要根据实际道路情况进行设置。
3. 最大转向角(Max Steering Angle)最大转向角是指车辆最大可以转向的角度。
它可以控制车辆的转向幅度,从而影响车辆的控制精度和响应速度。
如果最大转向角太小,车辆无法有效转向,导致控制不灵活。
而如果最大转向角太大,车辆可能会过度调整方向,导致路径偏离。
4. 车辆速度(Vehicle Speed)车辆速度是指车辆实际行驶的速度。
它可以影响车辆的控制精度和响应速度。
如果车辆速度太快,车辆可能无法跟随路径进行有效控制。
而如果车辆速度太慢,车辆可能无法及时响应路径变化。
综上所述,Pure Pursuit算法的参数设置需要根据具体应用场景进行合理调整,以实现车辆的稳定控制和优化性能。
Opendrive地图数据解析
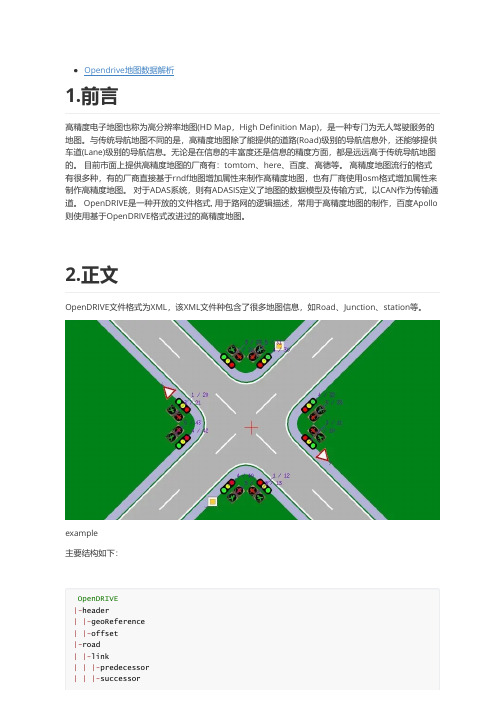
example主要结构如下:|||-neighbor||-type|||-speed||-planView|||-geometry||||-line ||||-spiral||||-arc||||-poly3||||-paramPoly3||-elevationProfile|||-elevation||-lateralProfile|||-superelevation|||-crossfall|||-shape||-lanes|||-laneOffset|||-laneSection||||-left|||||-lane||||||-link|||||||-predecessor|||||||-successor||||||-width||||||-border||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||||-material||||||-visibility||||||-speed||||||-access||||||-height||||||-rule||||-center|||||-lane||||||-link|||||||-predecessor|||||||-successor|||||||-predecessor|||||||-successor||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||-right|||||-lane||||||-link|||||||-predecessor|||||||-successor||||||-width||||||-border||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||||-material||||||-visibility||||||-speed||||||-access||||||-height||||||-rule||-objects|||-object||||-repeat||||-outlines|||||-outline||||||-cornerRoad||||||-cornerLocal||||-material||||-validity||||-parkingSpace||||-markings|||||-marking||||||-cornerReference||||-borders|||||-border||||||-cornerReference|||-objectReference||||-validity|||-tunnel ||||-validity|||-bridge ||||-validity||-signals|||-signal||||-validity||||-dependency||||-reference||||-positionRoad||||-positionInertial|||-signalReference||||-validity||-surface|||-CRG||-railroad|||-switch||||-mainTrack||||-sideTrack||||-partner|-controller||-control|-junction||-connection|||-predecessor|||-successor|||-laneLink||-priority||-controller||-surface|||-CRG|-junctionGroupcsB.Road LayoutOpenDRIVE中路网结构中的一个road,该road有三部分组成,蓝色的reference line,车道lane,车道lane的其他feature(限速等)。
两点间距 php 高德坐标系
1. 两点间距离在地理信息系统中,计算两点之间的距离是一项基本而重要的任务。
无论是在导航系统中确定最短路径,还是在地图应用中展示两个地点之间的距离,都需要准确地计算出两点之间的距离。
对于Web开发人员来说,将地理位置信息整合到他们的应用中也是一项常见的任务。
2. 高德坐标系高德地图是我国领先的数字地图内容、导航和位置服务解决方案提供商。
在高德地图中,地理位置信息使用的是高德坐标系,它是一种将地球表面的经纬度坐标映射到平面坐标系上的方法。
对于开发人员来说,使用高德坐标系进行地理位置信息的处理是必不可少的。
3. PHP中的地理位置信息处理PHP是一种广泛应用于Web开发的编程语言,它提供了丰富的地理位置信息处理功能。
在PHP中,我们可以利用现有的API或者库来处理地理位置信息,包括计算两点之间的距离、转换坐标系等操作。
4. 计算两点之间的距离对于Web开发人员来说,计算两点之间的距离是一项常见的需求。
在PHP中,我们可以利用现有的函数或者类库来实现这一功能。
以高德坐标系为例,我们可以利用高德地图API中提供的函数来计算两个地点之间的距离。
5. 代码示例以下是一个使用PHP和高德地图API来计算两点之间距离的简单示例:```php<?phpfunction getDistance($lat1, $lng1, $lat2, $lng2) {$url ="xxx{$lng1},{$lat1}destination={$lng2},{$lat2}type=1output=json key=your_key";$result = file_get_contents($url);$data = json_decode($result, true);if($data['status'] == 1) {return $data['results'][0]['distance'];} else {return false;}}$distance = getDistance(39.xxx,116.xxx,31.xxx,121.xxx);echo "两点之间的距离为:".$distance;>```在这个示例中,我们定义了一个`getDistance`函数,该函数接受四个参数分别为两个地点的经度和纬度。
地图与地图标注API用户手册
OverlayBundle 已封装到了 MapView 中,请使用 MapView 对 OverlayBundle 进行操作。 每个 Overlay 可以管理多个 OverlayItem,并且有自己的 事件
3 / 29
高德软件
处理模块和绘制方法,用户可以覆盖重写。 OverlayItem 是纯虚类,需要有此派生出点,线面等。 每个层里用户可以通过函数添加多个 OverlayItem。 点位于地图中心时展开 Label。 当点位于地图中心时,按 OK 按钮将点设置为所在层的焦点,
4 / 29
高德软件
1.3 定义
1.3.1 EAnchorRectLocationType 锚点定义
锚点只一个点的中心点在具体图表的什么位置。以下为具体定义,默认点 Item 锚点为 EAnchorTypeDownMid,即 7 enum EAnchorRectLocationType { /*
自动驾驶 场景数据 标准格式 转化

自动驾驶场景数据标准格式转化以下为一份自动驾驶场景数据的标准格式转化示例,为保护隐私,本示例中不包含真实名字和引用:{"timestamp": "2022-01-01 12:00:00", // 数据生成时间戳"location": {"latitude": 37.7749, // 场景发生地点纬度"longitude": -122.4194 // 场景发生地点经度},"weather": {"temperature": 25, // 当前温度(摄氏度)"humidity": 60, // 当前湿度(百分比)"visibility": 500 // 当前能见度(米)},"road_conditions": {"traffic_signs": [{"type": "speed_limit", // 交通标志类型"location": {"latitude": 37.7751, // 标志位置纬度"longitude": -122.4183 // 标志位置经度},"speed_limit": 50 // 限速标志速度限制(km/h)},{"type": "stop","location": {"latitude": 37.7747,"longitude": -122.4201}}],"intersection": {"type": "signalized", // 路口类型"location": {"latitude": 37.7753, // 路口位置纬度"longitude": -122.4200 // 路口位置经度},"traffic_light": "red" // 交通灯颜色状态}},"vehicle_data": {"speed": 60, // 车辆当前速度(km/h)"acceleration": 0.5, // 车辆当前加速度(m/s^2)"fuel_level": 75, // 车辆当前燃油水平(百分比) "engine_temperature": 90 // 车辆当前发动机温度(摄氏度) },"obstacles": [{"type": "pedestrian", // 障碍物类型"location": {"latitude": 37.7752, // 障碍物位置纬度"longitude": -122.4187 // 障碍物位置经度},"velocity": 1.5 // 障碍物当前速度(m/s)},{"type": "vehicle","location": {"latitude": 37.7748,"longitude": -122.4197},"velocity": 10}]}以上示例为一份自动驾驶场景数据的标准格式转化,包含了时间戳、位置、天气、道路状况、车辆数据和障碍物等关键信息。
高德地图API使用说明

使用AutoNavi MAP API 开发地图应用•为什么要使用AutoNavi MAP API•AutoNavi MAP API 概述•AutoNavi Android MAP API 与Google Android Map API 比较•如何使用AutoNavi MAP API如何实现坐标偏转如何创建MapView如何创建ItemizedOverlay如何创建PoiSearch如何创建Geocoder如何创建MyLocation•FAQ•技术支持(QQ群:122795260, 邮箱:mapservice@)为什么要使用AutoNavi MAP API因为商业上的原因,联想不能在中国市场发布的手机上预装Google相关的手机服务,包括Google地图API。
为了解决这一问题,我们和高德公司(AutoNavi)合作,在手机上预置了AutoNavi提供的多种基于位置的服务。
高德公司作为中国领先的导航电子地图内容和位置服务解决方案提供商,旗下的互联网MAP API()同样在业界具有良好的口碑。
可为客户提供跨平台、跨媒体的位置服务解决方案。
我们同时鼓励中国的开发者们,使用AutoNavi MAP API开发基于位置和地图应用程序,并且发布在中国市场中的联想手机上。
AutoNavi MAP API 概述AutoNavi MAP API是高德软件公司提供的调用地图的接口方法。
用户的应用程序可以通过AutoNavi MAP API提供的接口方法操作地图数据,实现位置相关或地图相关应用。
例如,通过调用AutoNavi MAP API,将地图数据整合到自己的应用中,可以将商户的地理位置信息在地图上进行标注,以很直观的形式展现给使用者。
AutoNavi MAP API还将添加自驾,公交及步行的线路规划API。
同时,还将加入对矢量地图的支持,大幅提高地图下载的速度。
在不久的将来,还会加入3D街区图和其他的个性化地理数据支持。
transcad中路网常用参数设置
TransCAD实际操作中需要加载小区质心层,质心用来表示小区并继承了小区所有属性。
质心通过质心连线连接到路网上,质心连线的阻抗(出行时间、通行能力等)代表了小区内部出行的综合成本(一般将出行时间设置为无限小,将通行能力设置为无限大),TransCAD通过Connect命令自动生成质心连线。
属性数据库的建立在构建路网层、小区层和质心层过程中,TransCAD将自动生成一些基本信息数据库,而进行交通需求预测分析需要添加的属性数据包括以下4部分:1、小区属性:包括小区的土地利用性质、面积、人口、岗位、经济状况、出行发生、出行吸引以及其他相关属性数据;2、路网属性:包括道路类型、道路长度、路段方向、通行能力、行车速度、行程时间、交叉口转弯信息、交通分配阻抗函数值等;3、道路节点属性:包括节点的经度、纬度、性质、转弯延误等;4、修饰图层:包括特征点的表示、等高线的定义等。
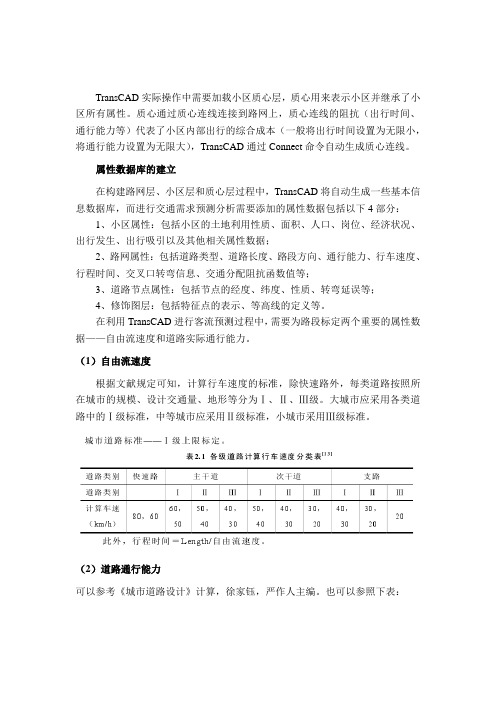
在利用TransCAD进行客流预测过程中,需要为路段标定两个重要的属性数据——自由流速度和道路实际通行能力。
(1)自由流速度根据文献规定可知,计算行车速度的标准,除快速路外,每类道路按照所在城市的规模、设计交通量、地形等分为Ⅰ、Ⅱ、Ⅲ级。
大城市应采用各类道路中的Ⅰ级标准,中等城市应采用Ⅱ级标准,小城市采用Ⅲ级标准。
(2)道路通行能力可以参考《城市道路设计》计算,徐家钰,严作人主编。
也可以参照下表:如果项目考虑道路一天的交通流量,则路段单向单车道通行能力需要在上表基础上除以所在城市的机动车高峰小时流量比***%,然后计算得出高峰小时流量。
TransCAD公交数据库的建立在TransCAD系统中,具有地理特征的信息是分层管理和存储的。
每一图层放有特征相同或相近的地理对象,并且有一个数据库表与之对应,图层中每一对象与数据库表中的一条记录相对应,这种关系是一一对应且是唯一的。
TransCAD利用层的概念来管理、贮存和分析信息,然后把不同的图层相互叠加起来,来实现对研究区域信息的可视化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高德 roadnet 参数
高德RoadNet参数详解
一、什么是高德RoadNet参数?
高德RoadNet参数是指在高德地图API中用于描述道路网络的一组参数。
这些参数包括道路的形状、长度、宽度、速度等信息,通过这些参数可以帮助我们更好地理解道路网络的特征,并在导航、路径规划等应用中发挥重要作用。
二、RoadNet参数的分类
1. 基本参数类:
- 道路编号:每条道路都有一个唯一的编号,用于标识该道路。
- 道路名称:道路的名称,描述了该道路的地理位置或特征。
- 道路等级:道路的等级反映了道路的重要性和通行能力,如高速公路、城市主干道等。
- 道路方向:道路的行驶方向,包括双向、单向等。
- 道路长度:道路的长度,以米为单位。
- 道路宽度:道路的宽度,以米为单位。
- 道路速度:道路的限速,以公里/小时为单位。
2. 路口参数类:
- 路口编号:每个路口都有一个唯一的编号,用于标识该路口。
- 路口名称:路口的名称,描述了该路口的地理位置或特征。
- 路口坐标:路口的地理坐标,用经纬度表示。
- 路口连接:连接到该路口的道路信息,包括进口道路和出口道路。
3. 路段参数类:
- 路段编号:每个路段都有一个唯一的编号,用于标识该路段。
- 路段形状:路段的形状信息,通常使用一组坐标点表示。
- 路段长度:路段的长度,以米为单位。
- 路段宽度:路段的宽度,以米为单位。
- 路段速度:路段的限速,以公里/小时为单位。
- 路段交通状态:路段的交通拥堵情况,如畅通、缓行、拥堵等。
三、RoadNet参数的应用
1. 导航系统:通过分析道路网络的参数,导航系统可以为用户提供最佳的行驶路线和导航指引,帮助用户准确、高效地到达目的地。
2. 路径规划:通过分析道路网络的参数,路径规划系统可以根据用户的出发地和目的地,计算出最短路径或最优路径,帮助用户规划行程。
3. 交通管理:通过实时监测道路网络的参数,交通管理部门可以了解道路的交通情况,及时采取措施疏导交通,提高道路通行能力。
4. 地理信息分析:通过分析道路网络的参数,地理信息系统可以研究道路网络的结构特征、交通流量分布等问题,为城市规划、交通
规划等提供科学依据。
四、RoadNet参数的更新和维护
高德地图会不断更新道路网络的参数,以反映实际的道路情况。
更新的方式包括人工调查、高精度地图数据采集、用户反馈等。
同时,高德地图也会对道路网络进行维护,及时修正道路参数中的错误或不准确的信息。
总结:
高德RoadNet参数是描述道路网络的一组重要参数,包括道路的形状、长度、宽度、速度等信息。
这些参数在导航、路径规划、交通管理和地理信息分析等领域发挥着重要作用。
通过分析道路网络的参数,我们可以更好地了解道路的特征,规划最佳路径,提高交通效率,为城市规划和交通规划提供科学依据。
高德地图会不断更新和维护道路网络的参数,以保证道路信息的准确性和实用性。