控制系统与CAD
控制系统CAD与仿真实验指导书
实验一MATLAB的实验环境及基本命令一实验目的:1.学习了解MA TLAB的实验环境2.在MA TLAB系统命令窗口练习有关MA TLAB命令的使用。
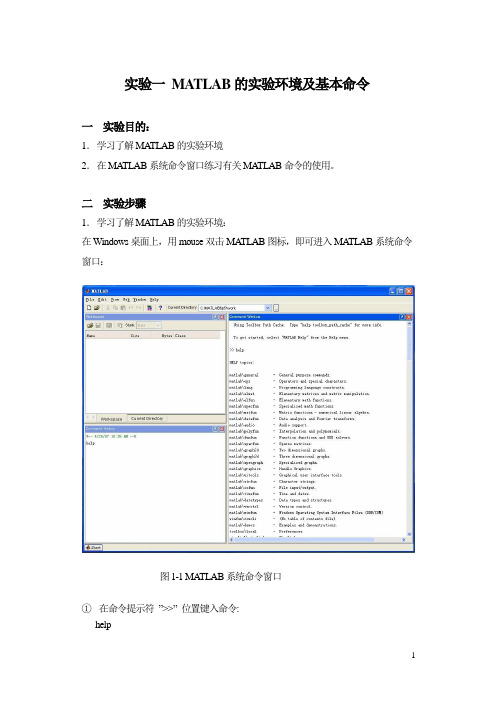
二实验步骤1.学习了解MA TLAB的实验环境:在Windows桌面上,用mouse双击MA TLAB图标,即可进入MA TLAB系统命令窗口:图1-1 MA TLAB系统命令窗口①在命令提示符”>>”位置键入命令:help此时显示MA T ALAB 的功能目录, 其中有“Matlab\general ”,“toolbox\control ”等;阅读目录的内容;② 键入命令:intro此时显示MA TLAB 语言的基本介绍,如矩阵输入、数值计算、曲线绘图等。
要求阅读命令平台上的注释内容,以尽快了解MA TLAB 语言的应用。
③ 键入命令:help help显示联机帮助查阅的功能,要求仔细阅读。
④ 键入命令:into显示工具箱中各种工具箱组件和开发商的联络信息。
⑤ 键入命令:demo显示MA TLAB 的各种功能演示。
2. 练习MA TLAB 系统命令的使用。
① 表达式MA TLAB 的表达式由变量、数值、函数及操作符构成。
实验前应掌握有关变量、数值、函数及操作符的有关内容及使用方法。
练习1-1: 计算下列表达式:要求计算完毕后,键入相应的变量名,查看并记录变量的值。
②.向量运算: )6sin(/250π=d 2/)101(+=a )sin(3.2-=e c i b 53+=n 维向量是由n 个成员组成的行或列数组。
在MA TLAB 中,由分号分隔的方括号中的元素产生一个列向量;由逗号或空号分隔的方括号中的元素产生一个列向量;同维的向量可进行加减运算,乘法须遵守特殊的原则。
练习1-2已知:X=[2 ;-4;8]求 :Y=R ';P=5*R ;E=X .*Y ;S=X '* Y练习1-3⑴产生每个元素为1的4维的行向量;⑵产生每个元素为0的4维的列向量;⑶产生一个从1到8的整数行向量,默认步长为1;⑷产生一个从π到0,间隔为π/3的行向量;③矩阵基本运算操作。
某设备控制系统CAD示意图
控制系统CAD复习题

一、 求解线性方程组:写出Matlab 命令并写出运行结果。
a=[1,2,-3.6;2,-5,0.25;5,10.68,7.7]; b=[11.9;-25.3;300.8]; a\bans= 18.5795 12.9441 9.0466二、 编写一个M 文件分别采用图形保持命令和同一个plot 命令实现在一个图上绘制函数曲线)sin(1t y =,)sin(5.02t e y t -=,)cos(3t y =,0 ≤ t ≤ 10,取t 的步长为0.01,并添加网格线,要求在命令平台上显示曲线2y 的最大值和最小值。
提示:最大值函数为max ,最小值函数为min 。
解法一: t=0:0.01:10; y1=sin(t);y2=exp(-0.5*t).*sin(t); y3=cos(t); plot(t,y1) hold on plot(t,y2) hold on plot(t,y3) grid; hold offy2max=max(y2) y2min=min(y2)解法二: t=0:0.01:10; y1=sin(t);y2=exp(-0.5*t).*sin(t); y3=cos(t);plot(t,y1,t,y2,t,y3); grid;y2max=max(y2) y2min=min(y2)⎪⎩⎪⎨⎧=++-=+-=-+8.3007.768.1053.2525.0529.116.32z y x z y x z y x》y2max= 0.5142 y2min= -0.1069三、 运行M 文件程序,查看运行结果,并逐条解释语句的作用x=0:0.01:12; %设置自变量x 的数值范围0~12,步长0.01 y1=sin(x)+cos(x); %定义函数y1的表达式 y2=1-cos(2*x); %定义函数y2的表达式 y3=exp(-0.2*x).*cos(2*x); %定义函数y3的表达式 plot(x,y1, 'r--',x,y2, 'g-',x,y3, 'b: ');% 在同一图形窗口绘制函数y1、y2和y3的图形,其中函数y1的图形为红色点划线, % 函数y2的图形为绿色实线,函数y3的图形为蓝色虚线。
控制系统数字仿真与cad第5章控制系统的计算机辅助分析
【例5-6】假设系统的开环传递函数为 试求该系统在单位负反馈下的阶跃响应曲线和最大超调量。 解:MATLAB程序为: %ex5_6.m num0=20;den0=[1 8 36 40 0];[num,den]=cloop(num0,den0); t=0:0.1:10;[y,x,t]=step(num,den,t);plot(t,y) M=((max(y)-1)/1)*100;disp([‘最大超调量M=‘ num2str(M) ‘%’]) 执行结果为:最大超调量M=2.5546%,单位阶跃响应曲线如图5-3中曲线所示。
图5-3 例5-6的单位阶跃响应曲线
例5-7 对于典型二阶系统 试绘制出无阻尼自然振荡频率ωn=6,阻尼比ζ分别为0.2,0.4,…,1.0,2.0时系统的单位阶跃响应曲线。
解 MATLAB程序为 %Example5_7.m wn=6;zeta=[0.2:0.2:1.0:2.0]; figure(1);hold on for k=zeta; num=wn.^2; den=[1,2*k*wn,wn.^2]; step(num,den);end title('Step Response');hold off 执行后可得如图5-5所示的单位阶跃响应曲线。 从图中可以看出,在过阻尼( ) 和临界阻尼( ) 响应曲线中,临界阻尼响应应具有最短的上升时间,响应速度最快;在欠阻尼( ) 响应曲线中,阻尼系数越小,超调量越大,上升时间越短,通常取
CSCAD
杨 旭 李 立 涛 程 杨 杨 涤
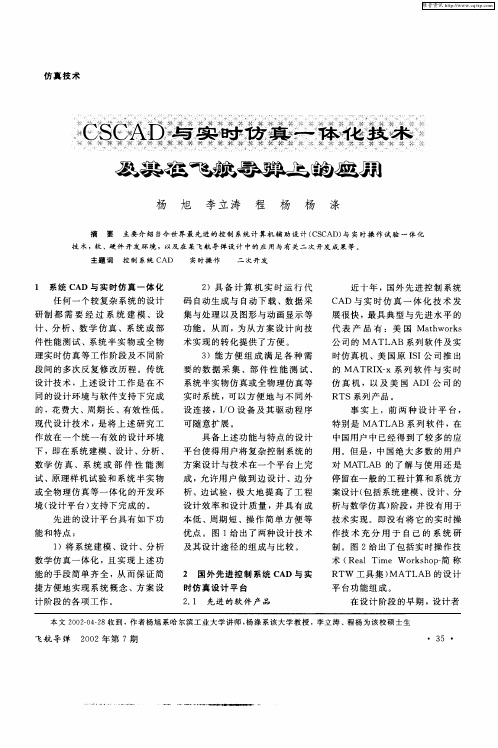
摘 要 主 要 介 绍 当今 世 界 最先 进 的控 制 系 统 计 算 机 辅 助 设 计 ( S AD 与 实 时 操 作 试 验 一 体 化 CC )
技 术 ,软 、硬 件 开 发 环 境 ,以 及 在 某 飞航 导 弹 设 计 中的 应 用 与 有 关 二 次 开 发 成 果 等 。
RT 的 Smuik加 速 器 目标 和 W i l n
传 统设计技术 :多个 开发阶段 ,多种工具
{
S函数 目标将 模 型部 件 化并 加速
仿 真过 程 。
在拥 有 了 函数 性 的模 型 后 , 设 计 者 可 能需 要 调 整 模 型 的参
统l 设 l 计
控制系 l
作技 术 充 分 用 于 自己 的 系统 研 制 。图 2给 出 了包 括 实时操 作 技
术 ( a Ti ok h p简 称 Rel me W r s o 一
能 的手段 简单 齐 全 , 而保 证 简 从 捷方 便地 实现 系 统概 念 、方案 设
计 阶段 的各项 工作 。
R Tw 工 具集 ) MATL AB的设 计 平 台功能组 成 。 在设计 阶段 的早 期 , 设计 者
段 间 的多次 反复修 改历 程 。传统
设计 技 术 ,上述 设计 工 作 是 在不 同的设计 环境 与 软件支 持 下完成 的 ,花费大 、 期 长 、有效性 低 。 周 现 代设计 技术 ,是将 上 述 研究 工 作 放在 一个统 一有 效 的设计 环境 下 ,即在 系统建模 、设计 、分析 、 数 学 仿 真 、系 统 或 部 件 性 能 测 试 、 理样 机试 验 和系 统 半实 物 原
近 十年 ,国外 先 进 控制 系统
控制系统仿真与CAD-实验报告

《控制系统仿真与CAD实验课程报告、实验教学目标与基本要求上机实验是本课程重要的实践教学环节。
实验的目的不仅仅是验证理论知识,更重要的是通过上机加强学生的实验手段与实践技能,掌握应用MATLAB/Simulink求解控制问题的方法,培养学生分析问题、解决问题、应用知识的能力和创新精神,全面提高学生的综合素质。
通过对MATLAB/Simulink进行求解,基本掌握常见控制问题的求解方法与命令调用,更深入地认识和了解MATLAB语言的强大的计算功能与其在控制领域的应用优势。
上机实验最终以书面报告的形式提交,作为期末成绩的考核内容。
二、题目及解答第一部分:MATLAB必备基础知识、控制系统模型与转换、线性控制系统的计算机辅助分析1.考虑碧名的Rossol化学反应方程组选定d = c = 且T1(O)= r2(0) = x3(0) =0.绘制仿育勢果的三维相轨:卜并傅出其在脣丫平面上的投彭.>>f=i nlin e('[-x (2)-x(3) ;x(1)+a*x(2);b+(x(1)-c)*x(3)]','t','x','flag','a','b','c');[t,x]=ode45( f,[0,100],[0;0;0],[],0.2,0.2,5.7);plot3(x(:,1),x(:,2),x(:,3)),grid,figure,plot(x( :,1),x(:,2)),grid2.求解下囲的最优化问题”(a) min -2JTI十ar空)(4谥+鬭* ' 'X firtn <I 工 1 .jra>0>>y=@(x)x(1F2-2*x(1)+x(2);ff=optimset;rgeScale='off;ff.TolFun=1e-30;ff.TolX =1e-15;ff.TolCon=1e-20;x0=[1;1;1];xm=[0;0;0];xM=[];A=[];B=[];Aeq=[];Beq=[];[x,f,c,d] =fmi nco n(y,x0,A,B,Aeq,Beq,xm,xM,@wzhfc1,ff)Warning: Opti ons LargeScale = 'off and Algorithm = 'trust-region-reflective' conflict.Ignoring Algorithm and running active-set algorithm. To run trust-region-reflective, set LargeScale = 'on'. To run active-set without this warning,use Algorithm = 'active-set'.> In fmincon at 456Local minimum possible. Constraints satisfied.fmincon stopped because the size of the current search direction is less than twice the selected value of the step size tolerance and constraints are satisfied to within the selected value of the constraint tolerance.<stopping criteria details>Active inequalities (to within options.TolCon = 1e-20):lower upper ineqlin ineqnonlin2x =1.00001.0000f =-1.0000c =iterations: 5 fun cCou nt: 20Issteple ngth: 1stepsize: 3.9638e-26algorithm: 'medium-scale: SQP, Quasi-Newt on, li ne-search' firstorderopt: 7.4506e-09con strviolati on: 0 message: [1x766 char]3.请持下面的传递函數欖理输入到MATLAB环境"闾*)=科晶舞FT⑹恥)=时备瞎而护秒(a) >> s=tf('s');G=(s A3+4*s+2)/(s A3*(s A2+2)*((s A2+1)A3+2*s+5))sA3 + 4 s + 2sA11 + 5 sA9 + 9 sA7 + 2 sA6 + 12 sA5 + 4 sA4 + 12 sA3 Con ti nu ous-time tran sfer function.(b)>> z=tf('z',0.1);H=(zA2+0.568)/((z-1)*(zA2-0.2*z+0.99))H =zA2 + 0.568z A3 - 1.2 z A2 + 1.19 z - 0.99Sample time: 0.1 sec ondsDiscrete-time tran sfer function.4.假设描述系统的常微分方程为期⑶⑹+ 13y(t)十4讥站+ = 请选择一组状态变量,并将此方程在MATLAB工作空闻中表示出来.如果想得到系统的传递菌数和零极点模型:我V将如何求取?得出的结果又是怎样西?由徴分方程模型能否直接写岀系统的传递函数模型?>> A=[0 1 0;0 0 1;-15 -4 -13];B=[0 0 2]';C=[1 0 0];D=0;G=ss(A,B,C,D),Gs=tf(G),Gz=zpk(G)x1 x2 x3x1 0 1 0x2 0 0 1x3 -15 -4 -13b =u1x1 0x2 0x3 2c =x1 x2 x3y1 1 0 0d =u1y1 0Con ti nu ous-time state-space model.Gs =s A3 + 13 s A2 + 4 s + 15Con ti nu ous-time tran sfer function.Gz =(s+12.78) (sA2 + 0.2212s + 1.174)Con ti nu ous-time zero/pole/ga in model.5.已知某系统的差分方程摸型为+ 2) + y(k+ 1.)十0】切的=卷依+ 1.) v2u(k).试将其输入到MATLAB X作空间"设采样周期为0.01s>> z=tf('z',0.01);H=(z+2)/(zA2+z+0.16)H =z A2 + z + 0.16Sample time: 0.01 sec onds Discrete-time tran sfer function.6.假设某单位负反馈系统申,=(3十+劄+ 5)’ G C (3) = (K F S 七瓦订2、试用 MAT1 - A 13推导岀闭环系统的传递函数模型。
控制系统cad形考作业
目录控制系统CAD作业1 (1)第1章 (1)第2章 (2)控制系统CAD作业2 (7)第3章 (7)第4章 (9)控制系统CAD作业3 (13)第5章 (13)第6章 (16)控制系统CAD作业4 (21)第7章 (21)第8章 (25)第1章一、填空题1.按控制信号传递的路径不同,可将控制系统划分为:按给定值操纵的开环控制、按偏差调节的闭环(反馈)控制和带补偿调节的复合控制三种控制方式,其中控制精度最高的是带补偿调节的复合控制控制方式。
2.对自动控制系统性能的基本要求可以归纳为“稳、快、准”三个方面,一个系统要能正常工作,其首先必须满足稳定的最基本要求。
3.控制系统的设计包含分析和设计两方面内容。
4.控制系统的仿真依据模型的种类不同,可分为物理仿真、数学仿真和混合仿真三种形式。
二、简答题1.简述控制系统CAD的发展历程,并简单分析控制系统CAD 和机械CAD或建筑CAD 的相同点和区别。
早期的控制系统设计可以由纸笔等工具容易地计算出来,如Ziegler 与Nichols 于1942年提出的PID 经验公式就可以十分容易地设计出来。
随着控制理论的迅速发展,光利用纸笔以及计算器等简单的运算工具难以达到预期的效果,加之在计算机领域取得了迅速的发展,于是20世纪70年代出现了控制系统的计算机辅助设计(computer-aided control system design , CACSD)方法。
近三十年来,随着计算机技术的飞速发展,各类CACSD 软件频繁出现且种类繁多,其中MATLAB已成为国际控制界的标准分析和辅助设计软件。
控制系统CAD 和机械CAD或建筑CAD的相同点是均是借助计算机软件进行设计;不同的是设计对象不同,其中控制系统CAD是借助计算机对控制系统进行仿真和设计,机械CAD是借助计算机对机械结构进行设计和计算,建筑CAD借助计算机辅助设计建筑结构,设计对象的不同决定了其各自使用的软件也不尽不同。
图形交互式控制系统设计工具CTRLCAD的开发

文 操 I I 模 输入 模型 示 I 统 析 l 件 作 刑 ll 显 I 系 分
新 建 系 统 模 型
I系 设 I 统 计 I 帮 助
打 开 ma文件 t
兰一
根轨迹分析 状 态 方 程 形 式
保存 mt a文件
退 出 系 统
零极 点形式
20 0 2年 1 O月 文章 编号
1 0 — 0 3( 0 2 0 — 4 2 0 0 05 1 2 0 ) 400 —5
图 形 交 互 式 控 制 系统 设 计 工具 C RL AD 的 开 发 T C
李 钟 慎
( 侨大 学 机 电 及 自动 化 学 院 , 州 3 2 1 ) 华 泉 60 1
中图分类号 TP 3 1 5 : TP 1 1.6 3 文献 标识码 A
控 制 系统 CA 已成 为 自动 控 制研 究 和工 程技 术人 员必 不 可少 的 手段 . D MATI AB现 已成 为 国际控 制 界应 用 最 广 泛 的 C AD软 件 之 一。 . 然而 , MATI B 是一 个命 令 行 式 的交 互 系统 , A 要 使 用它 , 须先 熟 悉 MATL 必 AB的命令 和 函数 , 需要 使用 者 进行 编 程 .当今 流 行 的 图形 用 也 户界面( GUI 使 用 户不 必 牢记 大 量的命 令 , 是通 过 窗 口、 ) 而 菜单 等选 择 计 算 机呈 现 给 用 户 的所
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Outline
8-1 Introduction to SIMULINK 8-2 Simulation to Dynamic Systems with SIMULINK 8-3 Create and Mask Subsystems
8-1 Introduction to SIMULINK
Model with SIMULINK
Getting started: File New Model
Operation to block
Drag the block icon into the model window Double-click on the block Block Parameters
Sinks (接收器模块库)
8-1 Introduction to SIMULINK
Sources (输入源模块库)
8-1 Introduction to SIMULINK
User-Defined Functions (用户定义模块库)
Model-based Design
8-2 Simulation to Dynamic Systems with SIMULINK
SIMULINK is a MATLAB accessory that models, simulates, and analyzes dynamic systems. SIMULINK provides a graphical user interface (GUI) for building models as block diagrams, allowing you to draw models as you would with pencil and paper. With SIMULINK, you can easily build models from scratch, or modify existing models to meet your needs. SIMULINK supports linear and nonlinear systems, modeled in continuous time, sampled time, or a hybrid of the two. SIMULINK turns your computer into a laboratory for modeling and analyzing systems that would not be possible or practical otherwise.
Example6-6
u
xBiblioteka BxA
—K
Example6_6_sim.mdl
Exercise
Simulate the following system with SIMULINK.
2u (t ) y (t ) 8u (t ) t 30 t 30
External function
8-3 Create and Mask Subsystems
Ports & Subsystems Subsystem
8-3 Create and Mask Subsystems
Edit Create subsystem
8-3 Create and Mask Subsystems
Mask editor
plot(tsim,ysim); Example8_4_sim.m
练习三、运用SIMULINK对系统仿真
生成系统结构图,改变输入信号电平从1~6,其系 统饱和环节的上下限为-1~1,对这6种情况分别进 行仿真并计算其超调量,将其绘制在同一张图中 进行比较
练习三、运用SIMULINK对系统仿真
打开SIMULINK,搭建系统结构框图,并保存为 ***.mdl 在MATLAB的Editor/Debugger窗口来编辑M文件, 运用sim命令,对模型进行外部的仿真 把源程序以文件形式保存到MATLAB的Work子目 录下 运行源程序,打印源程序清单,并保存图形
Six steps to modeling a system Defining the system Identifying system components Modeling the system with equations Building the SIMULINK block diagram Running the simulation Validating the simulation results
In Model-based Design, a system model is at the center of the development process, from requirements development, through design, implementation, and testing.
Example8-1
Scope
Example8_1.mdl
Example8-1 (continued)
plot(y1(:,1),y1(:,2))
Example8-2
Out1
plot(t,y) Example8_2.mdl
Example8-3
To Workspace
plot(t3,y3) Example8_3.mdl
[t,x,y]=sim(‘model’,[to tf],options,ut) 第一个参数必须,其它可缺省
In1
Out1
% Example8_4_sim.m t=(0:0.02:5)'; u=ones(size(t)); ut=[t,u]
[tsim,x,ysim]=sim('Example8_4',5,[ ],ut);
Math Operations (数学运算模块库)
8-1 Introduction to SIMULINK
Ports & Subsystems (端口和子系统模块库)
8-1 Introduction to SIMULINK
Signal Routing (信号路由模块库)
8-1 Introduction to SIMULINK
8-1 Introduction to SIMULINK
Continuous (连续模块库)
8-1 Introduction to SIMULINK
Discrete (离散模块库)
8-1 Introduction to SIMULINK
Look-Up Tables (查询表模块库)
8-1 Introduction to SIMULINK
8-1 Introduction to SIMULINK
Getting started
8-1 Introduction to SIMULINK
SIMULINK includes a comprehensive block library of sinks, sources, linear and nonlinear components, and connectors. If these blocks do not meet your needs, however, you can also create your own blocks. The interactive graphical programming environment simplifies the modeling process of systems.
Example8-6
Example8_6.mdl
Example8-7
Example8_7.mdl
Exercise
某一单位负反馈控制系统,给它输入阶跃量为 2的阶跃信号,试使用Simulink构造其闭环仿 真模型,并且绘制其响应曲线;然后将已经建 立的闭环控制系统建立成一个子系统。
1 s ( s 1)