驱动电路原理图2
LED驱动电源电路分析
LED驱动电源电路分析今天给大家简单分析一个(LED驱动)电路,供大家学习。
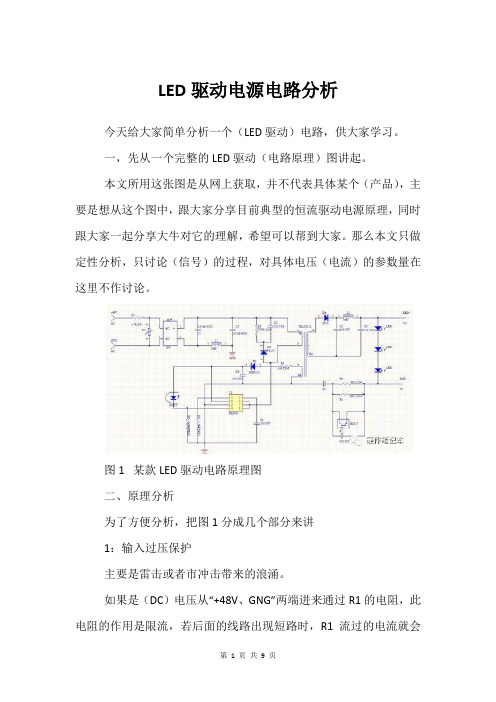
一,先从一个完整的LED驱动(电路原理)图讲起。
本文所用这张图是从网上获取,并不代表具体某个(产品),主要是想从这个图中,跟大家分享目前典型的恒流驱动电源原理,同时跟大家一起分享大牛对它的理解,希望可以帮到大家。
那么本文只做定性分析,只讨论(信号)的过程,对具体电压(电流)的参数量在这里不作讨论。
图1某款LED驱动电路原理图二、原理分析为了方便分析,把图1分成几个部分来讲1:输入过压保护主要是雷击或者市冲击带来的浪涌。
如果是(DC)电压从“+48V、GNG”两端进来通过R1的电阻,此电阻的作用是限流,若后面的线路出现短路时,R1流过的电流就会增大,随之两端压降跟着增大,当超过1W时就会自动断开,阻值增加至无穷大,从而达到保护输入电路+48V不受到负载的影响)限流后进入整流桥。
图2输入过压(保护电路)R1与RV构成了一个简单过压保护电路,RV是一个压敏元件,是利用具有非线性的(半导体)材料制作的而成,其伏安特性与稳压(二极管)差不多,正常情况显高阻抗状态,流过的电流很少,当电压高到一定的时候(主要是指尖峰浪涌,如打雷的时候高脉冲串通过市电串入进来),压敏RV会显现短路状态,直接截取整个输入总电流,使后面的电路停止工作,此时,由于所有电流将流过R1和RV,因R1只有1W的功率,所以瞬间可以开路,从而保护了整个电路不被损坏。
2、整流滤波电路当交流AC输入时,则桥式整流器是利用二极管的单向导通性进行整流的最常用的电路,将交流电转变为直流电。
当直流DC(+48V)电压直接进入整流桥BD时,输出一个上正下负的直流电压,如果+48V(电源)本身也是直流的,那整流桥的作用就是对输入起到的是极性保护作用,无论输入是上正下负还是上负下正都不会损坏驱动电源,通过C1C2L1进行滤波,图3是一个LCΠ型滤波电路,目的是将整流后的电压波形平滑的直流电。
线性恒流的LED驱动原理
线性恒流的LED驱动电路原理LED是冷光源,工作电压低、光效高,被认为是21世纪照明的新光源。
然而,目前LED照明设备投有得到普及应用的关键问题有两个,一是价格偏高;二是控制电路不稳定导致LED 寿命大大降低。
据统计,目前LED白光照明灯具出现的失效故障,70%左右是电源问题,20%左右是线路和结构问题,只有不到10%是LED单管的本身质量问题,所以电源管理方案的选择对于节能而言也举足轻重,这就要求在驱动电路设计中选择最合适的AC-DC驱动器。
因此可靠、低成本的控制电路是LED照明推广普及的前提。
由LED的电学特性可知,LED的平均正向电流随着正向电压的增大呈现大幅度的线性增长,LED在正向导通后其正向电压的细小变动将引起LED电流的很大变化,且电流对LED 结温影响很大,过大的电流很容易导致LED灯珠结温升高而损坏。
此外,由LED的光学特性可知随着正向电流的增加,LED光通量随之增大,即亮度增加。
因此为了保持LED发光亮度的恒定,就要保证LED正向电流的稳定。
因此设计合理的驱动电源对于LED照明灯具就显得十分重要。
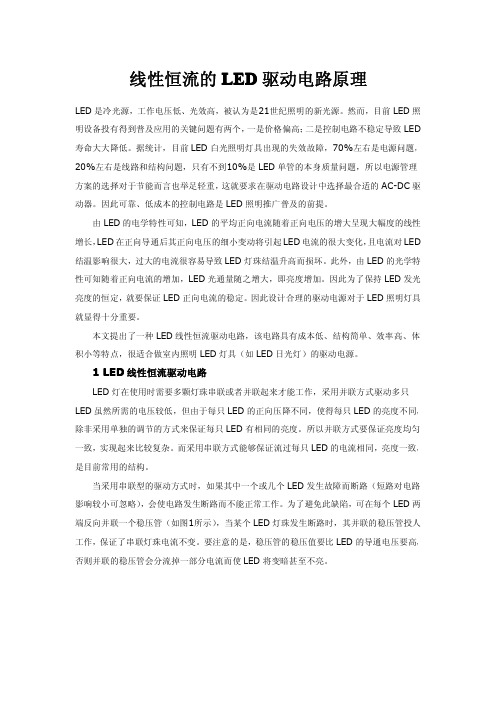
本文提出了一种LED线性恒流驱动电路,该电路具有成本低、结构简单、效率高、体积小等特点,很适合做室内照明LED灯具(如LED日光灯)的驱动电源。
1LED线性恒流驱动电路LED灯在使用时需要多颗灯珠串联或者并联起来才能工作,采用并联方式驱动多只LED虽然所需的电压较低,但由于每只LED的正向压降不同,使得每只LED的亮度不同,除非采用单独的调节的方式来保证每只LED有相同的亮度。
所以并联方式要保证亮度均匀一致,实现起来比较复杂。
而采用串联方式能够保证流过每只LED的电流相同,亮度一致,是目前常用的结构。
当采用串联型的驱动方式时,如果其中一个或几个LED发生故障而断路(短路对电路影响较小可忽略),会使电路发生断路而不能正常工作。
为了避免此缺陷,可在每个LED两端反向并联一个稳压管(如图1所示),当某个LED灯珠发生断路时,其并联的稳压管投人工作,保证了串联灯珠电流不变。
LCD驱动方法对于TN及STN

L C D驱动方法对于T N及S T N-L C D一般采用静态驱动或多路驱动方式。
这两种方式相比较各有优缺点。
静态驱动响应速度快、耗电少、驱动电压低,但驱动电极度数必须与显示笔段数相同,因而用途不如多路驱动广。
£1. 静态驱动基本思想在相对应的一对电极间连续外加电场或不外加电场。
如图1所示:其驱动电路原理如图2:图 1.LCD静态驱动示意图图 2.驱动电路原理图驱动波形根据此电信号,笔段波形不是与公用波形同相就是反相。
同相时液晶上无电场,L C D处于非选通状态。
反相时,液晶上施加了一矩形波。
当矩形波的电压比液晶阈值高很多时,L C D处于选通状态。
图 3.静态波形£2. 多路驱动基本思想电极沿X、Y方向排列成矩阵(如图4),按顺序给X电极施加选通波形,给Y电极施加与X电极同步的选通或非选通波形,如此周而复始。
通过此操作,X、Y电极交点的相素可以是独立的选态或非选态。
驱动X电极从第一行到最后一行所需时间为帧周期T f(频率为帧频),驱动每一行所用时间T r与帧周期的比值为占空比:D u t y=T r/T f=1/N。
图 4.电极阵列电压平均化从多路驱动的基本思想可以看出,不仅选通相素上施加有电压,非选通相素上也施加了电压。
非选通时波形电压与选通时波形电压之比为偏压比B i a s=1/a。
为了使选通相素之间及非选通相素之间显示状态一致,必须要求选点电压V o n一致,非选点电压V o f f一致。
为了使相素在选通电压作用下被选通;而在非选通电压作用下不选通,必须要求L C D的光电性能有阈值特性,且越陡越好。
但由于材料和模式的限制,L C D电光曲线陡度总是有限的。
因而反过来要求V o n、V o f f拉得越开越好,即V o n/V o f f越大越好。
经理论计算,当D u t y、B i a s满足以下关系时,V o n/V o f f取极大值。
满足下式的a,即为驱动路数为N的最佳偏压值。
几种IGBT驱动电路的保护电路原理图

几种IGBT驱动电路的保护电路原理图第一种驱动电路EXB841/840EXB841工作原理如图1,当EXB841的14脚和15脚有10mA的电流流过1us以后IGBT 正常开通,VCE下降至3V左右,6脚电压被钳制在8V左右,由于VS1稳压值是13V,所以不会被击穿,V3不导通,E点的电位约为20V,二极管VD,截止,不影响V4和V5正常工作。
当14脚和15脚无电流流过,则V1和V2导通,V2的导通使V4截止、V5导通,IGBT 栅极电荷通过V5迅速放电,引脚3电位下降至0V,是IGBT 栅一射间承受5V左右的负偏压,IGBT可靠关断,同时VCE的迅速上升使引脚6悬空.C2的放电使得B点电位为0V,则V S1仍然不导通,后续电路不动作,IGBT正常关断。
如有过流发生,IGBT的V CE过大使得VD2截止,使得VS1击穿,V3导通,C4通过R7放电,D点电位下降,从而使IGBT的栅一射间的电压UGE降低,完成慢关断,实现对IGBT的保护。
由EXB841实现过流保护的过程可知,EXB841判定过电流的主要依据是6脚的电压,6脚的电压不仅与VCE 有关,还和二极管VD2的导通电压Vd有关。
典型接线方法如图2,使用时注意如下几点:a、IGBT栅-射极驱动回路往返接线不能太长(一般应该小于1m),并且应该采用双绞线接法,防止干扰。
b、由于IGBT集电极产生较大的电压尖脉冲,增加IGBT栅极串联电阻RG有利于其安全工作。
但是栅极电阻RG不能太大也不能太小,如果RG增大,则开通关断时间延长,使得开通能耗增加;相反,如果RG太小,则使得di/dt增加,容易产生误导通。
c、图中电容C用来吸收由电源连接阻抗引起的供电电压变化,并不是电源的供电滤波电容,一般取值为47 F.d、6脚过电流保护取样信号连接端,通过快恢复二极管接IGBT集电极。
e、14、15接驱动信号,一般14脚接脉冲形成部分的地,15脚接输入信号的正端,15端的输入电流一般应该小于20mA,故在15脚前加限流电阻。
(整理)实用的步进电机驱动电路图.
实用的步进电机驱动电路(图)概述步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
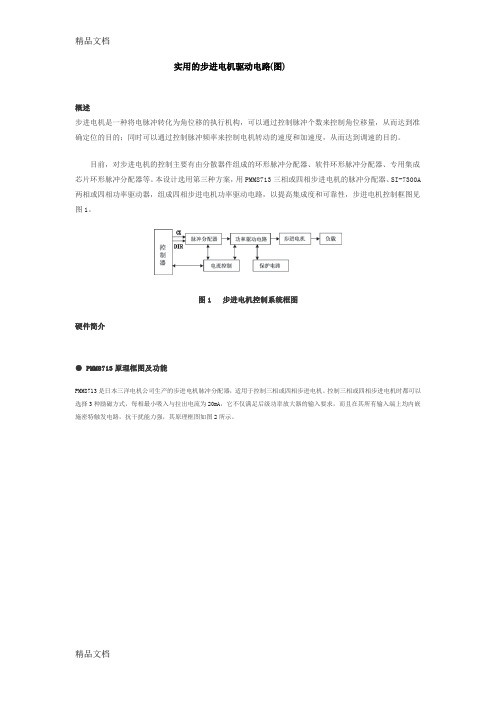
本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A 两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。
图1 步进电机控制系统框图硬件简介● PMM8713原理框图及功能PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。
控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。
PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。
采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。
当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。
激励方式控制电路用来选择采用何种励磁方式。
激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。
● SI-7300A的结构及功率驱动原理SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。
步进电机功率驱动级电路可分为电压和电流两种驱动方式。
电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
图3 LM331电压/频率变换电路● LM331芯片LM331是美国国家半导体公司生产的双列直插式8脚芯片,只需接入几个外部元件就可以方便地构成电压/频率(V/F)变换电路,电路如图4所示。
uln2003agp驱动电路的工作原理

一、引言uln2003agp驱动电路是一种常见的驱动电路,其工作原理对于电子工程师和爱好者来说是非常重要的。
本文将深入解析uln2003agp驱动电路的工作原理,希望读者能够通过本文的介绍和分析,对这一驱动电路有更深入的了解。
二、uln2003agp驱动电路的概述uln2003agp是一种高压高电流驱动器件,其内部集成了七个开关管,可用于驱动各种类型的负载。
uln2003agp常用于步进电机驱动、继电器驱动等领域。
其特点是输入信号低电平触发、输出端带有电流型放大器,能够驱动负载电流高达500mA。
下面将详细介绍uln2003agp驱动电路的工作原理。
三、uln2003agp驱动电路的主要特点1. 输入信号低电平触发:uln2003agp的输入信号是低电平触发型的,这意味着当输入端为低电平时,相应的输出端会有电流通过。
2. 输出端带有电流型放大器:uln2003agp的输出端带有电流型放大器,能够驱动负载电流高达500mA,适用于许多电子设备的驱动场景。
3. 集成了七个开关管:uln2003agp内部集成了七个开关管,能够同时驱动多个负载,极大地提高了其在电子设备中的应用灵活性和便利性。
四、uln2003agp驱动电路的工作原理1. 输入信号低电平触发机制:uln2003agp的输入端采用低电平触发机制,当输入为低电平时,相应的输出端会有电流通过。
这是通过内部的晶体管开关实现的,当输入为低电平时,对应的晶体管会处于导通状态,导通的电流会流向相应的输出端,从而实现对负载的驱动。
2. 输出端电流型放大器:uln2003agp的输出端带有电流型放大器,能够承受高达500mA的负载电流。
这使得uln2003agp能够驱动多种类型的负载,包括步进电机、继电器等。
3. 多个开关管的作用:uln2003agp内部集成了七个开关管,可以同时驱动多个负载。
这样的设计极大地提高了其在实际应用中的灵活性和便利性,使得uln2003agp成为众多电子设备中必不可少的驱动器件。
电机驱动电路

驱动电路的性能很大程度上影响整个系统的工作性能。
有许多问题需要慎重设计,例如,导通延时、泵升保护、过压过流保护、开关频率、附加电感的选择等。
1.开关频率和主回路附加电感的选择力矩波动也即电流波动,由系统设计给定的力矩波动指标为ΔI/I N,对有刷直流电动机而言,通常在(5~10)%左右。
为了便于分析可认为ΔI/I N=ΔI/(U s/R d) (1)式中R d为电枢回路总电阻。
代入前面各种驱动控制方式的ΔI表达式中,消去U s,可求出:对于单极性控制L d/R d≥5T~2.5T(可逆或不可逆) (2) 对于双极性控制L d/R d≥10T~5T(3)式中T为功率开关的开关周期。
对于有刷直流电动机,电磁时间常数L d/R d一般在10ms至几十毫秒。
若采用GTR,开关频率可取2KHz左右,T=0.5ms。
若采用IGBT,开关频率可取18KHz以上,所以上式均能满足。
若采用GTO或可控硅功率器件,由于工作频率只有100Hz左右,此时应考虑在主回路附加电抗器,且L d=L f+L a(4)对不可逆系统还应进一步检查临界电流,I aL=U s T/8L d≤I a0应小于电机空载电流,防止空载失控。
对于低惯量电机、力矩电动机,由于电磁时间常数很小(几个毫秒或更小),此时应考虑采用开关频率高的IGBT功率开关器件。
2. 功率驱动电路的选择图1 H桥开关电路(Ⅰ) 图2 H桥开关电路(Ⅱ){{分页}}小功率驱动电路可以采用如图1所示的H桥开关电路。
U A和U B是互补的双极性或单极性驱动信号,TTL电平。
开关晶体管的耐压应大于1.5倍U s以上。
由于大功率PNP晶体管价格高,难实现,所以这个电路只在小功率电机驱动中使用。
当四个功率开关全用NPN晶体管时,需要解决两个上桥臂晶体管(BG1和BG3)的基极电平偏移问题。
图2中H桥开关电路利用两个晶体管实现了上桥臂晶体管的电平偏移。
但电阻R上的损耗较大,所以也只能在小功率电机驱动中使用。
继电器驱动电路原理及注意事项

继电器驱动电路原理及注意事项默认分类2008-09-22 11:04:21 阅读1762 评论0 字号:大中小继电器驱动电路原理及注意事项家用空调器电控板上的12V直流继电器,是采用集成电路2003驱动,当2003输出脚不够用时才会用晶体管驱动,下面分别介绍这两种驱动电路。
1、集成电路2003电路原理图左图1~7是信号输入(IN),10~16是输出信号(OUT),8和9是集成电路电源。
右图是集成块内部原理图。
1.1 工作原理简介根据集成电路驱动器2003的输入输出特性,有人把它简称叫“驱动器”“反向器”“放大器”等,现在常用型号为:TD62003AP。
当2003输入端为高电平时,对应的输出口输出低电平,继电器线圈通电,继电器触点吸合;当2003输入端为低电平时,继电器线圈断电,继电器触点断开;在2003内部已集成起反向续流作用的二极管,因此可直接用它驱动继电器。
1.2检修判断2003好坏的方法非常简单,用万用表直流档分别测量其输入和输出端电压,如果输入端1~7是低电平(0V),输出端10~16必然是高电平(12V);反之,如果输入端1~7是高电平(5V),输出端10~16必然是低电平(0V);否则,驱动器已坏。
测试条件:1.待机;2.开机。
测试方法:将万用表调至20V直流档,负表笔接电控板地线(7812稳压块散热片),正表笔分别轻触2003各脚。
2. 晶体管驱动电路当晶体管用来驱动继电器时,必须将晶体管的发射极接地。
具体电路如下:2.1工作原理简介NPN晶体管驱动时:当晶体管T1基极被输入高电平时,晶体管饱和导通,集电极变为低电平,因此继电器线圈通电,触点RL1吸合。
当晶体管T1基极被输入低电平时,晶体管截止,继电器线圈断电,触点RL1断开。
PNP晶体管驱动电路目前没有采用,因此在这里不作介绍。
2.1 电路中各元器件的作用:晶体管T1可视为控制开关,一般选取VCBO≈VCEO≥24V,放大倍数β一般选择在120~240之间。