移动机器人SLAMiDE系统设计与实现
机器人SLAM课程设计

机器人SLAM课程设计一、课程目标知识目标:1. 学生能够理解SLAM(Simultaneous Localization and Mapping)的基本概念和原理,掌握其在机器人导航中的应用。
2. 学生能够掌握SLAM技术中常用的传感器类型、数据融合方法及其在地图构建和定位中的作用。
3. 学生能够了解不同类型的SLAM算法,并分析其优缺点。
技能目标:1. 学生能够运用所学的SLAM知识,设计和搭建简单的机器人导航系统。
2. 学生能够运用编程软件,实现对SLAM算法的部分代码编写和调试。
3. 学生能够通过团队合作,解决实际场景中机器人导航问题,提高动手实践能力。
情感态度价值观目标:1. 学生通过学习SLAM技术,培养对人工智能和机器人技术的兴趣,激发创新意识。
2. 学生在课程学习过程中,学会与他人合作、沟通交流,培养团队协作精神。
3. 学生能够关注机器人技术的发展,了解其在现实生活中的应用,提高对科技改变生活的认识。
本课程针对高年级学生,结合课程性质、学生特点和教学要求,将目标分解为具体的学习成果。
课程以实践为主,注重培养学生的动手能力和实际问题解决能力,同时兼顾理论知识的学习,使学生在掌握SLAM技术的基础上,能够将其应用于实际场景中,提高学生的综合素质。
二、教学内容1. SLAM基本概念与原理:包括SLAM的定义、发展历程、应用场景,以及SLAM技术中涉及的关键技术。
- 教材章节:第1章 机器人SLAM概述- 内容列举:SLAM定义、发展历程、应用领域、关键技术2. 常用传感器及其数据融合:介绍激光雷达、摄像头、惯性导航系统等传感器在SLAM中的应用,以及多传感器数据融合方法。
- 教材章节:第2章 传感器技术与数据融合- 内容列举:传感器类型、工作原理、数据融合方法3. SLAM算法分析:讲解常见的SLAM算法,如EKF-SLAM、FastSLAM、Graph-SLAM等,分析其优缺点及适用场景。
移动机器人SLAM技术
移动机器人SLAM技术在当今科技飞速发展的时代,移动机器人已经成为了人们生活和工作中的得力助手。
从家庭中的扫地机器人到工业领域的自动化搬运机器人,它们的身影无处不在。
而要让这些机器人能够在未知环境中自由移动、执行任务并准确地感知自身位置和周围环境,就离不开一项关键技术——SLAM 技术。
SLAM 技术,全称为 Simultaneous Localization and Mapping,即同时定位与地图构建。
简单来说,就是让机器人在移动的过程中,一边确定自己的位置,一边构建周围环境的地图。
这就好比我们人类在一个陌生的地方,需要一边记住自己走过的路,一边了解周围的地形和地标,以便能够准确地找到自己的位置和规划下一步的行动。
想象一下,一个扫地机器人在你的家中工作。
如果它不知道自己在哪里,也不清楚房间的布局,那么它很可能会遗漏一些区域或者重复清扫某些地方,无法高效地完成清洁任务。
而有了 SLAM 技术,机器人就能够实时地感知自己的位置,绘制出房间的地图,并根据地图规划出最优的清扫路径,从而提高工作效率和效果。
SLAM 技术的实现主要依赖于多种传感器的协同工作。
常见的传感器包括激光雷达、摄像头、惯性测量单元(IMU)等。
激光雷达通过发射激光束并测量反射回来的时间和强度,可以精确地测量机器人与周围物体的距离和方向,从而构建出环境的三维模型。
摄像头则可以获取丰富的图像信息,通过图像处理和分析来识别物体和特征。
IMU则用于测量机器人的加速度和角速度,帮助确定机器人的姿态和运动状态。
这些传感器采集到的数据通常是大量的、复杂的,并且存在一定的误差和噪声。
因此,如何对这些数据进行有效的融合和处理,是SLAM 技术中的一个关键问题。
目前,常用的方法包括卡尔曼滤波、粒子滤波、图优化等。
这些方法可以对传感器数据进行融合和校正,提高定位和地图构建的准确性。
在移动机器人的实际应用中,SLAM 技术面临着许多挑战。
例如,环境的动态变化,如人员的走动、家具的移动等,会导致地图的不准确和定位的偏差。
室内移动机器人的SLAM算法综述

SLAM算法概述
SLAM算法概述
SLAM算法主要涉及两个核心问题:定位和地图构建。其基本原理是利用机器 人在环境中移动时所获得的传感器数据,通过一定的算法进行处理,从而估计自 身的位置和姿态,并逐步构建出环境的地图。
SLAM算法概述
在SLAM算法中,激活函数是一个重要的组成部分。它主要负责从传感器数据 中提取有用的信息,并将其用于地图构建和定位。检测方式则决定了机器人如何 处理传感器数据,包括特征点检测、直接测量等。导航控制部分负责根据地图信 息和机器人当前状
室内移动机器人的SLAM算法综 述
01 摘要
目录
02 引言
03 SLAM算法概述
04
室内移动机器人中的 SLAM算法
05 结论
06 参考内容
摘要
摘要
随着机器人技术的不断发展,室内移动机器人在许多领域的应用越来越广泛。 而同时,同步定位与映射(SLAM)算法作为室内移动机器人的一项关键技术,引 起了研究者的广泛。本次演示将对室内移动机器人中的SLAM算法进行综述,主要 包括研究现状、算法原理、应用情况等方面。
激光雷达是一种常用的传感器,可以提供环境的详细信息。基于激光雷达的 SLAM算法通过处理这些数据,估计机器人的位置和姿态,并构建环境的地图。代 表性的算法有OctoMap、FAB-MAP等。这类算法精度较高,但受限于雷达的视场角 和测量精度。
2、基于视觉的SLAM算法
2、基于视觉的SLAM算法
视觉传感器可以提供丰富的环境信息,是许多SLAM算法的首选。基于视觉的 SLAM算法通过分析图像特征点的方式进行地图构建和定位。代表性的算法有 Davies-Cox、Cadena等。这类算法具有丰富的信息来源,但计算量较大,对处理 器性能要求较高。
移动机器人SLAM技术

移动机器人SLAM技术在当今科技迅速发展的时代,移动机器人已经成为了人们生活和工作中的重要角色。
从家庭中的智能扫地机器人到工业生产线上的自动化搬运机器人,它们的身影无处不在。
而在移动机器人能够自主行动、感知环境并完成各种任务的背后,一项关键技术起着至关重要的作用,那就是同步定位与地图构建(Simultaneous Localization and Mapping,简称 SLAM)技术。
SLAM 技术,简单来说,就是让机器人在未知环境中一边移动一边构建环境地图,同时利用这个地图来确定自己的位置。
想象一下,当你走进一个完全陌生的黑暗房间,你需要在摸索中了解房间的布局,并且清楚自己在这个布局中的位置,这就是移动机器人面临的挑战,而 SLAM 技术就是帮助它们解决这个难题的“法宝”。
为了实现这一目标,移动机器人通常会配备多种传感器,比如激光雷达、摄像头、超声波传感器等。
这些传感器就像是机器人的“眼睛”,能够收集周围环境的各种信息。
以激光雷达为例,它通过发射激光束并测量反射回来的时间和强度,来获取周围物体的距离和形状。
摄像头则可以捕捉图像,提供更丰富的视觉信息。
在收集到这些原始数据后,接下来就是对数据进行处理和分析。
这涉及到一系列复杂的算法和数学模型。
一种常见的方法是基于特征提取的算法。
通过从传感器数据中提取出有代表性的特征,比如点、线、面等,然后将这些特征与之前构建的地图进行匹配和对比,从而确定机器人的位置和姿态。
另一种方法是基于滤波的算法,如卡尔曼滤波和粒子滤波。
这些滤波算法可以对机器人的位置和地图进行估计和更新,以逐步提高精度。
在 SLAM 技术中,地图的表示形式也是多种多样的。
常见的有栅格地图、特征地图和拓扑地图。
栅格地图将环境划分为一个个小格子,每个格子表示环境中的一个区域,这种地图直观易懂,但数据量较大。
特征地图则重点关注环境中的显著特征,如墙角、柱子等,数据量相对较小,但对特征的提取和描述要求较高。
基于SLAM技术的移动机器人导航系统设计

基于SLAM技术的移动机器人导航系统设计随着现代科学技术的不断发展,机器人技术也在不断进步。
移动机器人在各个领域中得到了广泛应用,如工业制造、医疗保健、物流配送等。
在这些领域中,移动机器人导航系统是至关重要的一环。
基于SLAM技术的移动机器人导航系统设计是目前研究的热点之一,本文将对其进行分析和探讨。
一、SLAM技术的概念和原理SLAM是Simultaneous Localization and Mapping的缩写,即同时定位和地图构建技术。
它是机器人导航系统中的一项基本技术,可以使移动机器人在未知环境中实现自主导航和建立地图。
在SLAM技术的实现过程中,机器人需要同时在未知环境中定位自身和构建环境的地图。
SLAM技术可以基于不同的传感器实现,如激光雷达、视觉传感器等。
在使用激光雷达实现SLAM技术时,机器人需要获取激光数据来进行环境的地图构建和机器人的定位。
而在使用视觉传感器实现SLAM技术时,则需要使用图像处理技术实现环境的地图构建和机器人的定位。
二、SLAM技术在移动机器人导航系统中的应用SLAM技术在移动机器人导航系统中起着至关重要的作用。
它可以使机器人在未知环境中实现自主导航和建立环境的地图,在工业制造、医疗保健、物流配送等领域中得到广泛应用。
在工业制造中,机器人可以利用SLAM技术实现自主导航和进行物品搬运。
在医疗保健领域中,机器人可以利用SLAM技术实现自主导航和进行病房巡视等任务。
在物流配送中,机器人可以利用SLAM技术实现自主导航和物品搬运等任务。
三、基于SLAM技术的移动机器人导航系统设计基于SLAM技术的移动机器人导航系统设计需要考虑到多个方面。
以下为几个关键的考虑因素:1.传感器的选择传感器的选择影响着SLAM技术的实现过程。
在选择传感器时,需要考虑到机器人的使用环境、任务需求和成本等因素。
激光雷达和视觉传感器是常见的传感器选择。
2.环境地图构建算法的选择环境地图构建算法是SLAM技术的重要组成部分。
基于机器视觉技术的移动机器人导航系统设计与实现

基于机器视觉技术的移动机器人导航系统设计与实现随着科技的发展,机器人的应用范围越来越广泛。
移动机器人作为机器人领域的重要一环,其导航系统是关键技术之一。
基于机器视觉技术的移动机器人导航系统,能够实现对环境的感知与理解,并能够精确地定位和规划路径,为机器人在复杂环境中进行导航提供了有效的解决方案。
一、系统设计1. 环境感知机器视觉技术可以通过图像识别、目标检测与跟踪等算法,对机器人所处的环境进行感知。
首先,需要使用摄像头或深度相机来获取环境的视觉信息。
然后,通过图像处理和计算机视觉算法,对图像进行处理和分析,提取出环境中的关键信息,如墙壁、家具等。
同时,还可以利用深度相机获取场景的深度信息,进一步提高环境感知的准确性。
2. 位置与定位机器人在导航过程中需要准确地知道自己的位置信息。
通过机器视觉技术,可以将机器人所处的环境与地图进行匹配,得到机器人的精确位置。
在系统设计中,可以采用SLAM(同时定位与地图构建)算法,通过机器人自身的传感器数据以及视觉信息,实现对机器人位置的精确定位。
3. 路径规划路径规划是导航系统的核心部分。
机器视觉技术可以帮助机器人理解环境的复杂性,并根据环境中的障碍物、目标位置等信息,进行有效的路径规划。
在系统设计中,可以使用基于图的搜索算法,如A*算法、Dijkstra算法等,结合机器视觉技术提供的环境信息,生成最优的路径规划方案。
4. 避障与导航在路径规划的基础上,机器视觉技术还可以用于实现避障与导航功能。
通过对环境中障碍物的感知与检测,机器人能够及时避免碰撞,并根据实时的环境变化进行调整。
在实现过程中,可以采用深度学习算法,如卷积神经网络(CNN)等,实现对障碍物的快速识别与分析,从而保证机器人能够安全、高效地进行导航。
二、系统实现1. 硬件配置移动机器人导航系统的实现需要具备相应的硬件配置。
首先,需要配备摄像头或深度相机,用于获取环境的视觉信息。
其次,需要安装激光雷达等传感器,用于辅助机器人的定位与避障。
移动机器人导航和SLAM系统研究

移动机器人导航和SLAM系统研究移动机器人导航和SLAM系统研究移动机器人导航和SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)系统是机器人技术领域中的重要研究方向。
随着科学技术的飞速发展,移动机器人的应用越来越广泛,如自动导航、环境勘测、搜救等。
而导航和SLAM技术作为移动机器人的核心能力,提供了机器人实现自主感知和智能决策的基础。
在移动机器人中,导航是指机器人根据环境信息规划并实现路径的选择和控制。
导航技术主要包括定位和路径规划两个方面。
定位是指机器人确定自身在某个参考坐标系下的位置和姿态信息。
常用的定位方法有惯性导航、视觉定位、激光测距等。
路径规划则是在已知环境地图和机器人当前位置的情况下,确定机器人从起点到终点的最优路径。
经典的路径规划算法包括Dijkstra算法、A*算法、RRT等。
好的导航系统需要准确的定位和高效的路径规划能力,以实现安全、快速、智能的移动。
而SLAM系统则是指机器人在未知环境中实时地自主构建地图,并同时定位自身的过程。
SLAM技术是移动机器人实现自主感知和智能决策的重要手段。
在SLAM系统中,机器人需要通过传感器获取环境的信息,并准确地估计自身的位置和构建地图。
常用的SLAM方法包括基于激光雷达的激光SLAM、视觉SLAM、RGB-D SLAM等。
机器人在运动中通过不断采集传感器数据,经过数据融合和优化算法,实现对环境的建模和自身的定位。
SLAM系统对机器人的控制和决策提供了重要的依据,被广泛应用于无人驾驶、智能巡检、室内导航等领域。
移动机器人导航和SLAM系统的研究面临多个挑战。
首先,环境不确定性是导航和SLAM的主要问题之一。
移动机器人所处的环境往往是未知的、复杂的、动态的,如何在不同的环境中实现可靠的导航和地图构建是一个需要解决的难题。
其次,机器人定位的精确性和实时性对导航和SLAM系统的性能有重要影响。
《2024年移动机器人SLAM与路径规划研究》范文

《移动机器人SLAM与路径规划研究》篇一一、引言随着科技的飞速发展,移动机器人在工业、军事、服务等领域的应用越来越广泛。
为了实现移动机器人在未知环境中的自主导航和作业,其核心技术之一便是同步定位与地图构建(SLAM)和路径规划。
本文将对移动机器人的SLAM与路径规划进行深入研究,分析其技术原理、实现方法以及实际应用中的挑战与解决方案。
二、移动机器人SLAM技术研究1. SLAM技术原理SLAM是一种使移动机器人能够在未知环境中进行定位与地图构建的技术。
其基本原理是通过机器人自身的传感器(如激光雷达、摄像头等)获取环境信息,然后利用这些信息估计机器人的位置和姿态,同时构建出周围环境的地图。
在这个过程中,机器人不断地更新自己的位置和姿态信息,以及环境地图,从而实现自主导航。
2. SLAM技术实现方法目前,移动机器人SLAM技术的实现方法主要包括基于激光雷达的SLAM和基于视觉的SLAM。
基于激光雷达的SLAM通过激光雷达获取环境的三维点云数据,然后通过数据处理和算法分析,实现机器人的定位和地图构建。
而基于视觉的SLAM则通过摄像头获取环境的图像信息,然后利用计算机视觉技术进行图像处理和分析,实现机器人的定位和地图构建。
三、路径规划技术研究1. 路径规划技术原理路径规划是指机器人在已知环境或未知环境中,根据任务需求和自身状态,规划出一条从起点到终点的最优路径。
路径规划需要考虑机器人的运动学特性、环境因素、障碍物分布等因素,以及路径的长度、平滑度、安全性等指标。
2. 路径规划方法路径规划方法主要包括基于全局地图的路径规划和基于局部环境的路径规划。
基于全局地图的路径规划是指在已知全局地图的情况下,通过搜索算法(如A算法、Dijkstra算法等)规划出从起点到终点的最优路径。
而基于局部环境的路径规划则是根据机器人自身的传感器信息,实时感知周围环境,然后根据实时感知的信息进行路径规划和调整。
四、移动机器人SLAM与路径规划的融合应用移动机器人的SLAM与路径规划是密不可分的两个技术,它们在移动机器人的自主导航和作业中发挥着重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移动机器人SLAMiDE 系统设计与实现陈白帆,蔡自兴,邹智荣(中南大学信息科学与工程学院,长沙 410083)摘 要:针对动态环境下移动机器人同时定位与建图(SLAM)问题,设计一种动态环境SLAM 系统——SLAMiDE ,给出系统的整体结构框架和实现过程。
该系统通过动态目标检测、SLAM 和动态目标跟踪同时实现动态地图构建、静态地图构建和机器人定位。
实验结果证明,该系统是正确、可行的。
关键词:移动机器人;同时定位与建图;动态环境;动态目标检测;数据关联Design and Implementation of Mobile Robot SLAMiDE SystemCHEN Bai-fan, CAI Zi-xing, ZOU Zhi-rong(School of Information Science and Engineering, Central South University, Changsha 410083, China)【Abstract 】This paper designs a Simultaneous Localization and Mapping(SLAM) system to realize the mobile robot Simultaneous Localization and Mapping(SLAM) in dynamic environment, and presents the overall framework and realization process. The SLAMiDE system realizes the dynamic map building, static map building and mobile robot localization simultaneously through dynamic objects detection, SLAM and dynamic objects tracking. Experimental results show that SLAMiDE system is testified correct and feasible.【Key words 】mobile robot; Simultaneous Localization and Mapping(SLAM); dynamic environment; dynamic objects detection; data association DOI: 10.3969/j.issn.1000-3428.2011.17.053计 算 机 工 程 Computer Engineering 第37卷 第17期V ol.37 No.17 2011年9月September 2011·人工智能及识别技术· 文章编号:1000—3428(2011)17—0158—03文献标识码:A中图分类号:TP2421 概述移动机器人同时定位与建图(Simultaneous Localization and Mapping, SLAM)是移动机器人研究领域的基本问题与研究热点,也是移动机器人真正实现自主的最重要的条件之一。
同时定位与建图是指机器人在移动过程中根据位姿估计和传感器数据进行自身定位,同时建造增量式地图[1]。
SLAMiDE (SLAM in Dynamic Environment)是指在动态环境下移动机器人的同时定位与建图。
与传统的SLAM 相比,SLAMiDE 增加了对环境中动态目标的处理,考虑了动态目标在地图构建和机器人定位中的影响。
目前,大部分SLAM 研究都是在假设静态环境的前提条件下开展的,在真实环境中动态目标无处不在,如室内环境下的人员走动、门的开关、家具的移动,在室外则更多。
按照对动态目标的处理方式,现有的动态环境下的SLAM 方法可以分为2类:一类是检测观测信息中的动态目标信息及过滤[2];另一类是检测动态目标并对其进行跟踪[3]。
动态目标将直接影响SLAM 的精度和复杂度,而直接过滤动态信息会造成地图信息和移动机器人对环境感知的不完整。
另外,还有部分研究者就动态环境下的SLAM 的某个方面或模块的相关理论及方法展开了研究,对系统整体框架及其实现的研究则并不多见。
为了能更好地考察和估计动态环境下移动机器人同时定位与建图的所有信息,本文设计了一种完整的动态环境下移动机器人SLAM 系统,即SLAMiDE 系统。
2 SLAMiDE 系统原理与结构在动态环境下,完整的移动机器人SLAM 通过移动机器人的控制输入信息0:t u 和观测信息0:t z 估计当前系统状态,包括机器人位姿t x 、静态地图t S 、动态目标t D 和观测信息中暂时不能判定的信息t E ,即:()0:0:,,,,t t t t t t p x S D E z u (1)通过Bayesian 规则对式(1)分解,得:()()()0:0:0:0:,,,,,t t t t t t t t t t t p p p ⋅⋅E x z m D x z x S z u (2)其中,()0:0:,,t t t t p x S z u 为传统的SLAM 过程;(0:,,t t t p D x z),t m 为动态目标的跟踪过程;()0:,,t t t t p E x z m 则是对暂时不能判定是静态还是动态的目标信息进行估计的过程。
当前观测信息中可能含有已构建地图中的路标(静态目标)、动态目标,此外还可能包含新出现的静态目标、潜在的动态目标和噪声。
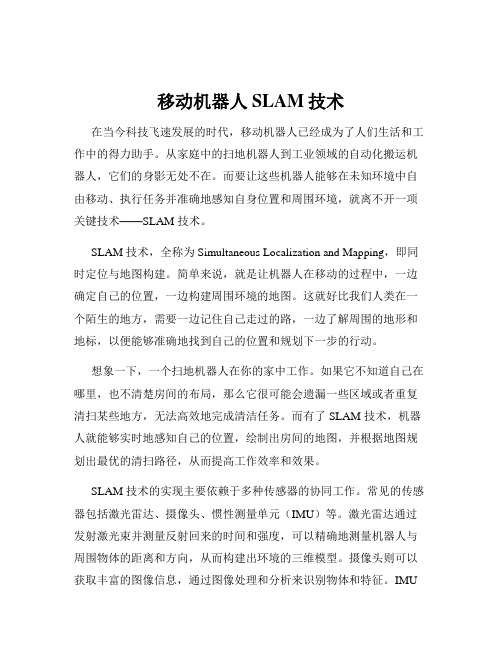
若能在观测信息中通过动态目标检测过程检测出静态目标S t z 、动态目标D t z 和其他E t z (不确定的目标),那么观测信息t z 可分类为:{},,S D E t t t t =z z z z (3)则式(2)中各项的估计可表示为:{}11arg max (,)(,)S t t t t t t t p p +−−−−=⋅x z x S x x u(4) {}1arg max (,)()S t t t t t t p p ++−−+−=⋅S z x S S S (5) {}1arg max (,)()D t t t t t t p p ++−−+−=⋅D z x D D D (6) {}1arg max (,)()E t tt t t t p p ++−−+−=⋅E zx E E E(7)可以看出,SLAMiDE 系统由动态目标检测、机器人定位、静态地图建图、动态地图建图组成,其系统结构如图1所示。
其中,静态地图指只包含静态目标的地图;动态地图指只包基金项目:国家自然科学基金资助重大项目(90820302);中南大学自由探索计划基金资助项目作者简介:陈白帆(1979-),女,讲师、博士,主研方向:移动机器人定位与建图;蔡自兴,教授、博士生导师;邹智荣,硕士研究生 收稿日期:2011-03-09 E-mail :chenbaifan@第37卷第17期 159陈白帆,蔡自兴,邹智荣:移动机器人SLAMiDE系统设计与实现含动态目标的地图。
图1 SLAMiDE系统结构该系统分为感知层、中间层、定位与建图层。
外部环境感知传感器(如视觉、激光或声纳)通过观测获得观测信息,对观测信息预处理后进行动态目标检测获得观测信息中的动态目标和静态目标,构建动、静态地图;同时,移动机器人通过内部航迹推测传感器计算当前位姿,利用预测位姿获得预测地图将其与观测信息进行数据关联,更新地图并更新机器人的位姿,最终达到同时定位与建图的目的。
其中,数据关联是指建立预测地图中的目标与传感器观测信息之间的对应关系,以确定它们是否源于环境中同一目标的过程。
SLAMiDE系统中定位与建图层的各功能模块说明如下:(1)机器人定位。
机器人定位实际上是与静态地图构建模块一起构成静态的同时定位与建图过程。
本文采用基于粒子群优化的粒子滤波定位方法[4]。
通过前一时刻机器人的位姿和当前控制输入,采用分布方法进行粒子采样,利用粒子群优化方法对预估粒子进行更新,优化了粒子采样,然后计算权重和粒子重采样。
其中,原方法中的tz为观测信息中获取的Stz。
(2)动态目标检测。
动态目标检测是SLAMiDE系统中的基本步骤,其目的是在观测目标中区分动态目标、静态目标和不确定信息,采用时空关联的动态目标检测法[5]。
由于之前不能判定的目标集合中有些因为当时信息不足无法判定,因此在动态环境下的移动机器人SLAM方法中,不能判定的目标集合也参与了动态目标检测。
某些此前不能判定的潜在动态目标会被确认,而有些则仍不能判定。
(3)动态地图构建。
根据机器人当前位姿预测值和动态目标的运动参数预测动态地图中的目标,将其再与通过动态目标检测后获得的动态目标进行数据关联,从而更新动态地图。
实际上,该模块除了动态目标跟踪功能外,还具有发现新的动态目标并将其添加到动态地图中的功能。
(4)静态地图构建。
通过机器人当前位姿预测值预测静态地图,将其与动态目标检测后获得的非动态目标进行数据关联,从而更新静态地图并达到最终更新机器人位姿的目的。
在该过程中,由于当前时刻机器人的观测仅限于机器人携带传感器的观测范围,因此可引入局部地图的思想减少数据关联的计算量,即用全局静态地图中的局部地图与当前观测信息进行数据关联。
数据关联的结果是发现观测中存在静态地图中已有的目标和发现新的静态目标及不能判定的信息。
3 SLAMiDE系统的实现SLAMiDE系统定位与建图层中的4个主要功能模块是该系统的4个主要实现过程,如图2所示。
该系统t时刻输入包括:前一时刻机器人的位姿1t−x,机器人的控制输入tu,当前时刻观测信息tz,前一时刻构建的静态地图1t−S和动态地图1t−D,前一时刻没判定的其他信息集合1t−E。
输出包括:当前时刻机器人的位姿tx,当前时刻新构建的静态地图tS和动态地图tD,当前时刻暂不判定的其他信息集合tE。
t tZ tD-1S t-1E t-1u t x t-1t t图2 SLAMiDE系统实现过程框图从纵向来看,SLAMiDE系统如同传统SLAM方法是一个包含预测、更新的迭代过程。
从横向来看,SLAMiDE系统包含4个主要处理过程:机器人的定位,动态目标检测,动态地图的构建和静态地图的构建,还有一个隐含的不判定目标集合的处理过程,这几个处理过程几乎是并行完成的。
SLAMiDE系统的实现步骤为:(1)根据机器人前一时刻的位姿和控制输入,对机器人当前位姿进行预测,得到t−x。
(2)根据机器人位姿预测t−x、前一时刻静态地图St-1、不判定目标集合E t-1,预测当前时刻静态地图和不判定目标集合t t−−+S E。