凸轮连杆程序
基于UG软件的串联式凸轮连杆机构的设计方法与运动分析
0 引言
1 凸轮 一连 杆组 合机构 的设 计
串联式组合机构是应用最为广泛 的组合 机构 , 主 动 件 的运动 依次 通过 若 干 基本 机 构 , 从 动 件 获 得某 使
一
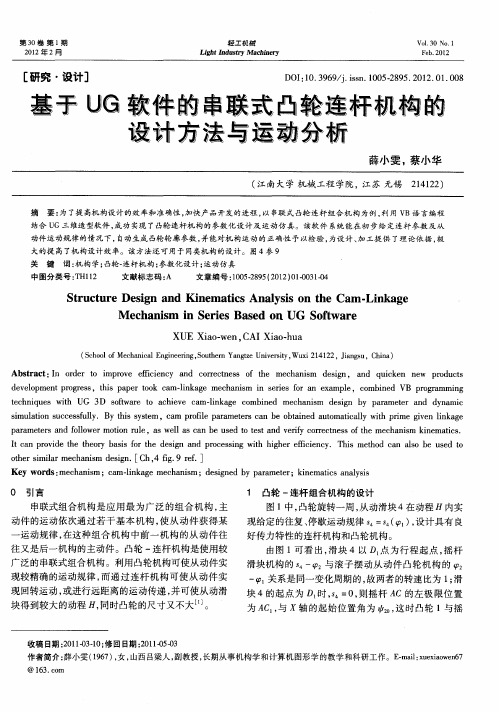
图 1中 , 凸轮旋 转一 周 , 动滑 块 4在动 程 内实 从 现给定 的往 复 、 歇运 动规 律 s s( ) 设计 具有 良 停 = , 好传力 特性 的连 杆机 构和 凸轮机 构 。
Ab t a t n r e t i r v e c e c a d o r cn s o t e s r c :I o d r o mp o e f in y n c re t e s f h me h n s i c a im d sg e in, a d u c e n w p o u t n q i k n e rd cs d v l p n r g e s,t i a e o k a l ka e me h n s i e i s fr a x mp e,c mb n d VB r g a e eo me tp o r s hs p p r t o c m—i g c a im n s re o n e a l n o i e p o r l I
— — I
z
S 一 关系通过上述运算后可变换成 : 关 系, 一 而 摇杆 实际摆 角为 =( 加一 ) 因此 容 易 得 到 :一 : , l 关系 ;
2 )由试取 的 A B杆 长 度 , 定 了 凸轮 的 基 圆半 径 决
r( B ̄A O B)
变化 ( 即改变 S 大小 ) 可求得一 系列 值 , , 这样 求 得 了 一 的关 系 , 凸轮 机构设 计创 造 了条件 。 s 为
D2
, ∞
凸轮—连杆组合机构优化设计分析
凸轮—连杆组合机构优化设计分析作者:何铭坤来源:《科学与财富》2017年第19期摘要:为满足机械生产需求,需要在现有基础上,来对凸轮-连杆组合结构进行优化设计,争取提高其运行效率和动作精度。
基于其传动原理,对分度结构几何特性进行分析,并应用运行运动学设计解析法等进行分析,争取进一步提高其运行性能。
本文对凸轮-连杆组合机构优化设计要点与技术进行了简单分析。
关键词:分度机构;凸轮连杆组合机构;优化设计当前,凸轮-连杆组合机构已经在机械自动化设备中得到了广泛应用,这种装置,能够实现任意设计运动规律,自行定义运动轨迹,要想对这种装置进行优化,就必须懂得其工作原理,而后结合计算机,对其进行有目的的优化,确保其各个参数的合理性。
通过优化设计后,使其可以更好的满足机械生产实际需求,提高作业效率。
一、凸轮-连杆组合机构运行原理凸轮-连杆组合机构结构其可以精确地实现提前预设的任意运动规律和运动轨迹,因此在自动机械应用中具有很大的优势。
想要对其进行优化设计,需要掌握其运行原理,即原动杆件逆时针转动时,驱动铰销上的滚动轴承将会在固定槽凸轮槽内运动,然后利用连杆作用,促使推送杆可以按照提前设定好的运动规律或者运动轨迹进行往复运动。
对于凸轮-连杆组合机构的优化设计,首先应当建立凸轮-连杆组合机构的设计模型,通过对模型进行分析,并根据模型就凸轮-连杆组合结构的相关参数进行计算,得出结果,从而确保组合结构优化设计的科学性与合理性。
二、建立凸轮-连杆组合机构设计模型1.机构设计要求对凸轮-连杆组合机构进行优化设计,首先需要保证其横向尺寸最小,然后最大程度上来提高机械传动效率。
根据此设计要求,来建立目标函数,并确定设计变量和约束条件,最后根据模型分析进行求解,得出与组合机构设计相关的参数。
2.建立目标函数确定机构横向尺寸为优化目标函数,根据图1所示,机构横向尺寸主要受曲柄长度r以及滑块位于最左端位置时滑块与凸轮轴心O横向间距h0决定,并且还会受动件形成hm影响,则可确定目标函数为:f(x)=hm+h0+r3.确定设计变量想要实现对凸轮-连杆组合机构的优化设计,要保证各结构部位设计的紧凑,需要在设计时加强对构件尺寸的管理。
凸轮连杆机构

A、B、C、D是复合铰链 ——计算在内
两个以上的构件共用同一转动轴 线所组成的转动副称为复合铰链。
38
A、B、C、D处各 有两个转动副。 pL =10
F=3n-2PL-PH =3×7–2×10–0 =1
39
(3-1)个铰链
1 2 4
3
(4-1)个铰链
m个构件在同一轴线上组成 m-1个转动副。
40
=1
F=3n-2PL-PH =3 4 -2 6 -0 =0 错
48
2 1 3
2
1
5
3
4
4 F=3n-2PL-PH =3 3-2 4 - 0 = 1 对 F=3n-2PL-PH =3 4 -2 6 - 0 = 0 错
49
机械设计基础 —— 平面连杆机构
3、 机构中对运动不起作用的对称部分
52
自由度计算公式
F=3n-2PL-PH
机构自由度= 3×活动构件数-(2×低副数+1×高副数) 几种特殊结构的处理: 1、局部自由度 2、复合铰链 3、虚约束 —排除 —计算在内
—排除
53
机构的自由度与确定运动条件
计算机构自由度应注意的事项(续)
小结 ◆ 复合铰链
存在于转动副处 正确处理方法:复合铰链处有m个构件 则有(m-1)个转动副
9
凸 轮 副
齿 轮 副
t
t
10
空间运动副
螺旋副 圆柱副 球面副
11
3.运动链和机构
机构: 是由构件通过运动副连接而成的。例如四杆机构。
运动链: 两个以上的构件以运动副连接而成的系统。 原动件:按给定运动规律独立运动的构件 从动件:其余的活动构件 机 架:固定不动的构件 2
凸轮机构的工作原理

凸轮机构的工作原理
凸轮机构是一种常见的工程机械传动装置,它通过凸轮和连杆来实现转动运动的转化。
其工作原理如下:
1. 凸轮:凸轮是一个带有不规则曲线轮廓的轴,通常是圆柱体。
它的轮廓曲线根据需要进行设计,可以是圆弧、椭圆或其他形状。
凸轮的作用是带动连杆完成特定的运动。
2. 连杆:连杆是一个与凸轮相连的刚性杆件,它可以是直杆、摇杆、活塞杆等形式。
连杆的一端与凸轮相连,另一端则连接着被驱动的零件,如活塞、摇臂等。
3. 转动运动转化:当凸轮不断旋转时,凸轮轮廓上的凸点会使连杆发生相应的运动。
这是由于凸轮轮廓的不规则性,使得连杆在转动过程中受到不同大小和方向的力,从而引起连杆的运动。
4. 应用:凸轮机构在多种机械系统中被广泛应用,如汽车发动机、工业机械、制造业自动化等。
它的工作原理简单可靠,能够实现复杂的运动要求,起到了重要的传动和控制作用。
总之,凸轮机构通过凸轮和连杆的配合来实现传动和控制功能,具有可靠性高、准确性好等优点,是工程领域中常见的机械传动装置之一。
凸轮连杆机构自由度计算

凸轮连杆机构自由度计算1. 引言说到机械结构,大家一定听说过“凸轮连杆机构”吧!别看名字挺复杂,其实它就是一种让机器动起来的神奇组合。
就像我们身边的各种设备,无论是汽车的发动机,还是玩具里的小马达,背后都少不了这些精妙的设计。
不过,今天我们要聊的重点是自由度的计算,这个听上去有点儿高大上的概念,其实也没那么复杂,咱们一起来捋一捋。
2. 自由度的概念2.1 什么是自由度?自由度,顾名思义,就是一个机构可以独立运动的方式。
想象一下,咱们的手臂,它可以上下、左右、前后动,这些不同的运动方式就是自由度。
如果一个机构能在空间中随心所欲地动,那它的自由度就高;反之,受限制的运动就说明自由度低。
2.2 为什么要计算自由度?计算自由度,简单来说,就是为了知道这个机构能不能实现我们想要的动作。
就像买菜的时候,知道什么菜好吃,什么菜不适合,能省不少事儿。
想象一下,如果你设计的机器连转个圈都费劲,那可真是自讨苦吃。
因此,算清楚自由度,能帮助我们优化设计,避免不必要的麻烦。
3. 自由度计算的基本原则3.1 凯普拉定理要计算自由度,咱们得先了解个名叫“凯普拉定理”的东西。
这可是工程师们的金科玉律!根据这个定理,自由度的计算公式是这样的:F = 3(N 1) 2J H。
其中,F代表自由度,N是机构的零件数量,J是关节的数量,H是约束数量。
3.2 各种因素影响自由度这个公式就像做菜时的配方,不同的食材组合会影响最终的味道。
零件多了,能动的方式就多;关节多了,反而可能让动作变得笨拙;而约束条件就像一个个小绳子,把自由度给拴住了。
比如说,你如果在家里装了个重重的门,开关门的自由度自然就少了,动起来麻烦多了。
4. 实际应用4.1 机械手臂说到实际应用,我们可以看看机械手臂。
现代工业中,这玩意儿可是个大热门!机械手臂的设计需要精准的自由度计算,才能保证它可以灵活地抓取各种物品。
想象一下,咱们的手臂能做的事儿,机械手臂也得做到,比如说转动、抓握、移动等等。
4开口机构
轮控制一页综框。
2.综框运动规律由凸轮外形曲线决定,不同的织物需用不同的凸 轮来织制,更换品种则需更换凸轮。
3.凸轮外形曲线一般由小半径到大半径、大半径到小半径、大半
径到大半径和小半径到小半径共四种不同弧段拼接而成。
凸轮外形与综框升降的关系:
织机主轴每回转一转,经纱开口一次,而踏盘每回转一转,则要开 口Rw次,完成一个梭口变化周期。所以
因此经纱同纬纱的交织规律具有相当大的灵活性。织物的经向组
织循环数可大到100 – 2000根。
提花开口机构可分为以下结构形式: 单动式提花开口机构 复动式提花开口机构 电子提花开口机构
提刀
机构组成: 纹板、阅读装置、提花装置、回综装置
纹板(card) 横针
(一)传统单动式提花开口机构
(single lift jacquard shedding) 单动式: 提花刀箱在主轴一转内上下往复运动一次, 形成一次梭口。
(2)综框联动式凸轮开口机构的优缺点:
结构简单,安装维修方便,制造精度要求不高。 吊综皮带在使用过程中会逐渐伸长,必须周期性检查梭口位置。 踏综杆挂综处作圆弧摆动,综框在运动中前后晃动,经纱与综丝的 摩擦增多,引起断头。不适宜于高速运转,织机Vmax=230r/min。
上梁和吊综装置影响机台光线,不利于检查布面。
1 2 . . . . . . .
交叉点
1-6页综 7-12页综 后花筒穿综分布
1 2 . . . . . . .
双花筒机构原理
注意织布机有 左右手车之分
12
12
位移
3、常见的两种多臂开口机构
(1)复动式单花筒消极多臂开口机构
1)开口运动规律
凸轮连杆机构应用实例

凸轮连杆机构应用实例
凸轮连杆机构是一种工程机械中常用的机构,它可以将旋转运动转化为直线运动,具有结构简单、传动效率高等优点,以下是几个凸轮连杆机构的应用实例。
1. 发动机凸轮轴
发动机凸轮轴是一种广泛应用凸轮连杆机构的机械,它通过凸轮轴上的凸轮与曲柄连杆机构配合,将旋转运动转化为活塞上下往复运动,从而实现引擎的内燃作用。
凸轮轴不仅能够控制进气和排气的阀门开关,还可以控制进气和点火的时机等方面,使得发动机的工作更加精准和高效。
2. 印刷机凸轮机构
印刷机是一种凸轮连杆机构广泛应用的机器,它通过凸轮机构控制印版的上下运动,从而实现印刷。
在印刷机凸轮机构中,凸轮轴作为动力源,通过凸轮的转动驱动曲柄连杆机构,进而带动印版的上下往复运动,使得油墨能够均匀地印刷到纸张上。
3. 压缩机凸轮机构
压缩机凸轮机构是一种将旋转运动转化为直线运动的机构,它通过凸轮轴上的凸
轮与连杆机构配合,将旋转运动转化为往复运动,从而实现气体的压缩。
压缩机凸轮机构在工业生产中广泛应用,如空气压缩机、冷藏压缩机、汽车发动机中的压缩器等,其准确的运动控制能够保证产品的稳定性和可靠性。
以上是凸轮连杆机构的应用实例,它们在工程机械中发挥着重要的作用,提高了机械的效率和精度,同时也促进了工业生产的发展。
连杆机构和凸轮机构分析和设计

连杆机构和凸轮机构分析和设计1.连杆机构连杆机构是若干刚性构件用低副连接而成的机构,故又称为低副机构。
连杆机构分为平面连杆机构和空间连杆机构两大类,本文主要讨论平面连杆机构,而平面连杆机构中结构最简单、应用最广泛的是四杆机构。
1.1平面四杆机构的基本类型全部运动副均为转动副的四杆机构称为铰链四杆机构,它是四杆机构的最基本型式。
在此机构中,固定不动的构件AD称为机架;与机架相连接的杆件AB、CD称为连架杆,其中能作整周回转运动的连架杆(AB)称为曲柄,只能在一定范围内作往复摆动的连架杆(CD)称为摇杆;机构中作平面运动的构件BC称为连杆。
铰链四杆机构根据其两连架杆的不同运动情况,又可分为:曲柄摇杆机构、双曲柄机构和双摇杆机构。
1.2平面四杆机构有曲柄的条件铰链四杆机构有曲柄的条件为:1)最短杆和最长杆长度之和小于或等于其它两杆长度之和;2)最短杆连架杆或机架。
当最短杆为连架杆时,该铰链四杆机构成为曲柄摇杆机构;当最短杆为机架时,成为双曲柄机构;当最短杆不为连架杆或机架(即最短杆为连杆)时,铰链四杆机构中无曲柄,此时称为双摇杆机构。
1.3压力角和传动角1)压力角铰链四杆机构中,如果不考虑构件的惯性力和铰链中的摩檫力,则原动件AB通过连杆BC作用到从动件CD上的力F将沿BC方向,该力的作用线与受力点C的绝对速度v c所夹的锐角δ称为压力角。
为使机构传动灵活,效率高,要求F t越大越好,即要求压力角δ越小越好。
2)传动角压力角的余角称为传动角,由上面分析可知,传动角θ愈大(压力角δ愈小)对传动愈有利。
所以,为了保证所设计的机构具有良好的传动性能,通常应使最小传动角θmin大于等于40°,在传递力矩较大的情况下,应使θmin大于等于50°。
(当传动角θ=0°时机构所处的位置为死点位置,也就是从动件与连杆共线的位置。
)2.凸轮机构及其设计凸轮机构是含有凸轮的一种高副机构。
凸轮是一个具有曲面轮廓的构件,一般多为原动件(有时为机架);当凸轮为原动件时,通常作等速连续转动或移动,而从动件则按预期输出特性要求作连续或间歇的往复摆动、移动或平面复杂运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮连杆程序%-- 11-8-14 下午3:20 --%disp ' ******** 偏置移动从动件盘形凸轮设计********'disp '已知条件:'disp ' 凸轮作逆时针方向转动,从动件偏置在凸轮轴心的右边'disp ' 从动件在推程作指定规律运动,在回程作指定规律运动'rb = 90;rt = 30;e = 0;h = 110;ft = 100;fs = 90;fh = 100;alp = 45;L2=447;L3=134;L4=508;L5=92;L6=100;L7=150;zshan=17;z1=22;z2=37; z3=19;z4=80;r=180;xa=-90;ya=500;xe=0;ye=-150;guding=2*pi/3fprintf (1,' 基圆半径rb = %3.4f mm \n',rb) fprintf (1,' 滚子半径rt = %3.4f mm \n',rt) fprintf (1,' 推杆偏距 e = %3.4f mm \n',e) fprintf (1,' 推程升程h = %3.4f mm \n',h) fprintf (1,' 推程运动角ft = %3.4f 度\n',ft) fprintf (1,' 远休止角fs = %3.4f 度\n',fs) fprintf (1,' 回程运动角fh = %3.4f 度\n',fh)fprintf (1,' 推程许用压力角alp = %3.4f 度\n',alp) fprintf (1,' 杆长L2 = %3.4f mm \n',L2) fprintf (1,' 杆长L3 = %3.4f mm \n',L3) fprintf (1,' 杆长L4 = %3.4f mm \n',L4) fprintf (1,' 杆长L5 = %3.4f mm \n',L5) fprintf (1,' 杆长L6 = %3.4f mm \n',L6) fprintf (1,' 杆长L7 = %3.4f mm \n',L7) fprintf (1,' 齿数zshan = %3.4f mm \n',zshan)fprintf (1,' 齿数z1 = %3.4f mm \n',z1) fprintf (1,' 齿数z2 = %3.4f mm \n',z2) fprintf (1,' 齿数z3 = %3.4f mm \n',z3) fprintf (1,' 齿数z4 = %3.4f mm \n',z4) fprintf (1,' 扇齿轮半径r = %3.4f mm \n',r)fprintf (1,' a点横坐标xa = %3.4f mm \n',xa) fprintf (1,' a点纵坐标ya = %3.4f mm \n',ya) fprintf (1,' e点横坐标xe = %3.4f mm \n',xe) fprintf (1,' e点纵坐标ye = %3.4f mm \n',ye) fprintf (1,' gudingjiao guding = %3.4f mm \n',guding)hd= pi / 180;du = 180 / pi;se=sqrt( rb^2 - e^2 );d1 = ft + fs;d2 = ft + fs + fh;disp ' 'disp '计算过程和输出结果:'disp ' 1- 计算凸轮理论轮廓的压力角和曲率半径'disp ' 1-1 推程's = zeros(ft);ds = zeros(ft);d2s = zeros(ft);at = zeros(ft);atd = zeros(ft);pt = zeros(ft);jiao6=zeros(ft);jiaoD=zeros(ft);xc=zeros(ft);yc=zeros(ft);xb=zeros(ft);yb=z eros(ft);xd=zeros(ft);yd=zeros(ft);for f=1: 17 * pi / 18if 1<f<7 * pi / 18s(f)=0;s = s(f);ds(f)=0;ds = ds(f);d2s(f)=0;d2s = d2s(f);elseif 7 * pi / 18 < f < 33 * pi / 72s(f)=2 * h *((f - 7 * pi / 18)/ (5*pi/9)-sin(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2);s = s(f);ds(f)=2 * h *(1-cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)*(5*pi/9);ds = ds(f);d2s(f)=8*pi * h*sin(4*pi(f-7*pi/18)/(5*pi/9)) /(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f);elseif 33 * pi / 72 <f< 43 * pi / 72% s(f)=2 * h *(4*pi*(f-7*pi/18)^2/(5*pi/9)^2);s = s(f);s(f)=2 * h *((pi^2 - 8)/16/pi-(pi-2)*(f-7*pi/18)/(5*pi/9)+4*pi*(f-7*pi/18)^2/(5*pi/9)^2);s = s(f);% ds(f)= h/(pi+2)/(5*pi/9);ds = ds(f);% d2s(f)=8*pi * h/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f)ds(f)= h *(2-pi+8*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=8*pi * h/(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f)elseif 43 * pi / 72 <f< 53 * pi / 72s(f)=2 * h *((pi+1)*(f-7*pi/18)/(5*pi/9)-pi/4+sin(4*pi*(f-7*pi/18)/(5*pi/9))/4/pi)/( pi+2);s = s(f);ds(f)= 2* h *(pi+1+cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h*sin(4*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s =d2s(f);elseif 53 * pi / 72 <f< 63 * pi / 72s(f)= h *((8-33*pi^2)/16/pi+(7*pi+2)*(f-7*pi/18)/(5*pi/9)-4*pi*(f-7*pi/18)^2/(5 *pi/9)^2)/(pi+2);s = s(f);ds(f)= h *(7*pi+2-8*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 63 * pi / 72 <f< 17 * pi / 18s(f)= 2*h *(pi/2+(f-7*pi/18)/(5*pi/9)-sin(4*pi*(f-7*pi/18)/(5*pi/9))/4/pi)/(pi+2);s = s(f);ds(f)= 2*h *(1-cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f); d2s(f)=-8*pi * h*sin(4*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s = d2s(f);% 求压力角endjiao6=s/r*(z2/z3*(z1/zshan))xd=L6*cos(0+s/r*(z2/z3*(z1/zshan)))+xeyd=L6*sin(0+s/r*(z2/z3*(z1/zshan)))+yejiaoD=acos((L5^2+xd^2+yd^2-L3^2)/2*L5*(xd^2+yd^2)^(1/2))+acos((L6^ 2+xd^2+yd^2-L7^2)/2*L6*(xd^2+yd^2)^(1/2))+0+s/r*(z2/z3*(z1/zshan)) xc=L5*cos(jiaoD)+xdyc=L5*sin(jiaoD)+yda=((xa-xc)^2+(ya-yc)^2)^(1/2)at(f)=atan((a*cos(acos((L2^2+a^2-rb^2)/(2*a*L2))+s)-L2*(1-ds))/(a*sin(acos((L 2^2+a^2-rb^2)/(2*a*L2))+s)));atd(f) = at(f) * du;p1=(a^2+L2^2*(1-ds)^2-2*a*L2*(1-ds)*cos(acos((L2^2+a^2-rb^2)/(2*a* L2))+s))^1.5;p2=a^2+L2^2*(1-ds)^3-L2*a*(d2s*sin(acos((L2^2+a^2-rb^2)/(2*a*L2))+s)+(1 -ds)*(2-ds)*cos(acos((L2^2+a^2-rb^2)/(2*a*L2))-s));pt(f)= p1 /p2;p = pt(f);endatm = 0;% ftm=0for f=1: 17 * pi / 18if atd(f) > atmatm = atd(f);endendfprintf (1,' 最大压力角atm = %3.4f 度\n',atm)for f=1: 17 * pi / 18if abs(atd(f) - atm) < 0.1ftm = f;breakendendfprintf (1,' 对应的位置角ftm = %3.4f 度\n',ftm)if atm > alpfprintf (1,' * 凸轮推程压力角超过许用值,需要增大基圆!\n')endptn = rb + h;for f=1: 17 * pi / 18if pt(f) < ptnptn = pt(f);endendfprintf (1,' 轮廓最小曲率半径ptn = %3.4f mm\n',ptn)for f=1: 17 * pi / 18if abs(pt(f) - ptn) < 0.1ftn = f;breakendendfprintf (1,' 对应的位置角ftn = %3.4f 度\n',ftn)if ptn < rt+ 5fprintf (1,' * 凸轮推程轮廓曲率半径小于许用值,需要增大基圆或减小滚子!\n')enddisp ' 1-2 回程(余弦加速度运动)'s = zeros(fh);ds = zeros(fh);d2s = zeros(fh);ah = zeros(fh);ahd = zeros(fh);ph = zeros(fh);for f = 17 * pi / 18 : 2 * piif 17*pi/18<f<73*pi/72s(f)= 2*h *(pi/2+(27*pi/18-f)/(5*pi/9)-sin(4*pi*(27*pi/18-f)/(5*pi/9))/4/pi)/(pi+2) ;s = s(f);i / 18 : 2 * piif abs(ph(f) - phn) < 0.1fhn = f;breakendendfprintf (1,' 对应的位置角fhn = %3.4f 度\n',fhn)if phn < rt + 5fprintf (1,' * 凸轮回程轮廓曲率半径小于许用值,需要增大基圆或减小滚子!\n')enddisp ' 2- 计算凸轮理论廓线与实际廓线的直角坐标'n = 360;s = zeros(n);ds = zeros(n);r = zeros(n);rp = zeros(n);x = zeros(n);y = zeros(n);dx = zeros(n);dy = zeros(n);xx = zeros(n);yy = zeros(n);xp = zeros(n);yp = zeros(n);xxp = zeros(n);yyp = zeros(n);for f = 1 : nif 1<f<7 * pi / 18s(f)=0;s = s(f);ds(f)=0;ds = ds(f);d2s(f)=0;d2s = d2s(f);elseif 7 * pi / 18 < f < 33 * pi / 72s(f)=2 * h *((f - 7 * pi / 18)/ (5*pi/9)-sin(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2);s = s(f);ds(f)=2 * h *(1-cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)*(5*pi/9);ds = ds(f); d2s(f)=8*pi * h*sin(4*pi(f-7*pi/18)/(5*pi/9)) /(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f);elseif 33 * pi / 72 <f< 43 * pi / 72s(f)=2 * h *((pi^2 - 8)/16/pi-(pi-2)(f-7*pi/18)/ (5*pi/9)+4*pi*(f-7*pi/18)^2/(5*pi/9)^2);s = s(f);ds(f)= h *(2-pi+8*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=8*pi * h/(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f)elseif 43 * pi / 72 <f< 53 * pi / 72s(f)=2 * h *((pi+1)*(f-7*pi/18)/(5*pi/9)-pi/4+sin(4*pi*(f-7*pi/18)/(5*pi/9))/4/pi)/( pi+2);s = s(f);ds(f)= 2* h *(pi+1+cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h*sin(4*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 53 * pi / 72 <f< 63 * pi / 72s(f)= h *((8-33*pi^2)/16/pi+(7*pi+2)*(f-7*pi/18)/(5*pi/9)-4*pi*(f-7*pi/18)^2/(5 *pi/9)^2)/(pi+2);s = s(f);ds(f)= h *(7*pi+2-8*pi*(f-7*pi/18)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 63 * pi / 72 <f< 17 * pi / 18s(f)= 2*h *(pi/2+(f-7*pi/18)/(5*pi/9)-sin(4*pi*(f-7*pi/18)/(5*pi/9))/4/pi)/(pi+2);s = s(f);ds(f)= 2*h *(1-cos(4*pi*(f-7*pi/18)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f); d2s(f)=-8*pi * h*sin(4*pi*(f-7pi/18)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 17*pi/18<f<73*pi/72s(f)= 2*h *(pi/2+(27*pi/18-f)/(5*pi/9)-sin(4*pi*(27*pi/18-f)/(5*pi/9))/4/pi)/(pi+2);s = s(f);ds(f)= 2*h *(-1+cos(4*pi*(27*pi/18-f)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=8*pi * h*sin(4*pi*(27pi/18-f)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 73 * pi / 72 <f< 83 * pi / 72s(f)= h *((8-33*pi^2)/16/pi+(7*pi+2)*(27*pi/18-f)/(5*pi/9)-4*pi*(27*pi/18-f)^2/(5*pi/9)^2)/(pi+2 );s = s(f);ds(f)= h *(-7*pi-2+8*pi*(27*pi/18-f)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f); d2s(f)=8*pi * h/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 83 * pi / 72 <f< 93 * pi / 72s(f)=2 * h *((pi+1)*(27*pi/18-f)/(5*pi/9)-pi/4+sin(4*pi*(27*pi/18-f)/(5*pi/9))/4/pi) /(pi+2);s = s(f);ds(f)= 2* h *(-pi-1-cos(4*pi*(27*pi/18-f)/(5*pi/9)))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=8*pi * h*sin(4*pi*(27*pi/18-f)/(5*pi/9))/(pi+2)/(5*pi/9)^2;d2s = d2s(f);elseif 93 * pi / 72 <f< 103 * pi / 72s(f)=2 * h *((pi^2 - 8)/16/pi-(pi-2)(27*pi/18-f)/ (5*pi/9)+4*pi*(27*pi/18-f)^2/(5*pi/9)^2);s = s(f);ds(f)= h *(-2+pi-8*pi*(27*pi/18-f)/(5*pi/9))/(pi+2)/(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h/(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f);elseif 103 * pi / 72 < f < 3 * pi / 2s(f)=2 * h *((27 * pi / 18-f)/ (5*pi/9)-sin(4*pi*(27*pi/18-f)/(5*pi/9)))/(pi+2);s = s(f);ds(f)=2 * h *(-1+cos(4*pi*(27*pi/18-f)/(5*pi/9)))/(pi+2)*(5*pi/9);ds = ds(f);d2s(f)=-8*pi * h*sin(4*pi(27*pi/18-f)/(5*pi/9)) /(pi+2)/(5*pi/9)^ 2;d2s = d2s(f);d2s = d2s(f);elseif 3 * pi / 2< f <2*pis(f)=0;s = s(f);ds(f)=0;ds = ds(f);d2s(f)=0;d2s = d2s(f);endxd=L6*cos(0+s/r*(z2*z1/z3/zshan)+pi)+xeyd=L6*cos(0+s/r*(z2*z1/z3/zshan)+pi)+yejiaoD=acos((L5^2+xd^2+yd^2-L3^2)/2*L5*(xd^2+yd^2)^(1/2))+acos((L6^ 2+xd^2+yd^2-L7^2)/2*L6*(xd^2+yd^2)^(1/2))+0+s/r*(z2/z3*(z1/zshan))xc=L5*cos(jiaoD)+xdyc=L5*sin(jiaoD)+yda=((xa-xc)^2+(ya-yc)^2)^(1/2)baijiao=acos(L2^2+a^2-(xa-xc-L2*cos(guding-pi+jiaoD))^2+(yz-yc-L2*sin( guding-pi+jiaoD))^2)^0.5)/(2*L2*a)xb=a*sin(f)-L2*sin(f+baijiao); xb = xx(f);yb=a*cos(f)-L2*cos(f+baijiao); yb = yy(f);% dx(f) = (ds - e) * sin(f * hd) + (se + s) * cos(f * hd); dx = dx(f);% dy(f) = (ds - e) * cos(f * hd) - (se + s) * sin(f * hd); dy = dy(f);% xp(f) = x + rt * dy / sqrt(dx ^ 2 + dy ^ 2);xxp = xp(f);% yp(f) = y - rt * dx / sqrt(dx ^ 2 + dy ^ 2);yyp = yp(f);% r(f) = sqrt (x ^2 + y ^2 );% rp(f) = sqrt (xxp ^2 + yyp ^2 );enddisp ' 2-1 推程(等加速/等减速运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y'for f = 10 : 10 :ftnu = [f xx(f) yy(f) xp(f) yp(f)];disp(nu)enddisp ' 2-2 回程(余弦加速度运动)'disp ' 凸轮转角理论x 理论y 实际x 实际y'for f = d1 : 10 : d2nu = [f xx(f) yy(f) xp(f) yp(f)];disp(nu)enddisp ' 2-3 凸轮轮廓向径'disp ' 凸轮转角理论r 实际r'for f = 10 : 10 : nnu = [f r(f) rp(f)];disp(nu)enddisp '绘制凸轮的理论轮廓和实际轮廓:'plot(xx,yy,'r-.') % 理论轮廓(红色,点划线)axis ([-(rb+h-10) (rb+h+10) -(rb+h+10) (rb+rt+10)]) % 横轴和纵轴的下限和上限axis equal % 横轴和纵轴的尺度比例相同text(rb+h+3,0,'X') % 标注横轴text(0,rb+rt+3,'Y') % 标注纵轴text(-5,5,'O') % 标注直角坐标系原点title('偏置移动从动件盘形凸轮设计') % 标注图形标题hold on; % 保持图形plot([-(rb+h) (rb+h)],[0 0],'k') % 横轴(黑色)plot([0 0],[-(rb+h) (rb+rt)],'k') % 纵轴(黑色)plot([e e],[0 (rb+rt)],'k--') % 初始偏置位置(黑色,虚线)ct = linspace(0,2*pi); % 画圆的极角变化范围plot(rb*cos(ct),rb*sin(ct),'g') % 基圆(绿色)plot(e*cos(ct),e*sin(ct),'c--') % 偏距圆(蓝绿色,虚线)plot(e + rt*cos(ct),se + rt*sin(ct),'y') % 滚子圆(黄色)plot(xp,yp,'b') % 实际轮廓(蓝色)。