从高维特征空间中获取元胞自动机的非线性转换规则
元胞自动机算法

元胞自动机算法元胞自动机算法,简称CA(Cellular Automaton),是一种在离散空间中由简单规则驱动的计算模型。
CA算法的核心思想是将空间划分为离散的小区域,每个小区域称为一个元胞,每个元胞根据一定的规则与相邻元胞进行交互和演化。
CA算法的应用非常广泛,涵盖了物理、生物、社会等多个领域。
让我们来看一个简单的例子,以帮助理解CA算法的基本概念。
假设我们有一个一维的元胞空间,每个元胞只能处于两种状态之一:活跃或者不活跃。
我们以时间为轴,每一个时间步骤都会根据一定的规则更新元胞的状态。
假设规则是:如果一个元胞以及它的两个相邻元胞中,有两个元胞是活跃的,那么该元胞在下一个时间步骤中将变为活跃状态;否则,该元胞将变为不活跃状态。
通过多次迭代,我们可以观察到整个元胞空间的状态发生了变化。
初始时,只有少数几个元胞是活跃的,但随着时间的推移,越来越多的元胞变为活跃状态,形成了一种规律性的分布。
这种分布不断演化,直到达到一种平衡状态,其中的活跃元胞的分布不再发生变化。
这个简单的例子展示了CA算法的基本特征,即简单的局部规则可以产生复杂的全局行为。
在CA算法中,每个元胞的状态更新是基于其周围元胞的状态而确定的,这种局部的交互最终导致了整个系统的全局行为。
除了一维元胞空间,CA算法还可以应用于二维和三维空间。
在二维元胞空间中,每个元胞有更多的邻居,例如上下左右以及斜对角线方向的邻居。
同样地,每个元胞的状态更新规则也可以根据其周围元胞的状态而确定。
CA算法在生物学中有广泛的应用,例如模拟细胞分裂、生物群落的演化等。
在社会学中,CA算法可以用于模拟人群的行为,例如交通流量的模拟、城市规划等。
此外,CA算法还可以用于物理学中的模拟,例如模拟固体的晶体结构等。
总结一下,元胞自动机算法是一种基于简单规则的计算模型,通过元胞之间的局部交互和状态更新,产生复杂的全局行为。
这种算法广泛应用于不同领域,能够模拟和研究各种现象和问题。
元胞自动机简介

元胞⾃动机简介摘要:1. 阐述了元胞⾃动机的发展历程、结构、特征及基本理论与⽅珐;2. 指出元胞⾃动机理论的优势与不⾜,1引⾔复杂科学1. 20世纪80年代,以美国圣塔菲(SantaFe)学派为⾸提出了复杂科学,⼀经提出,在世界范围内引起了⼴泛的关注。
⽬前,关于复杂性和复杂系统的科学研究占据着越来越重要的位置,以⾄于被有些科学家誉为“21世纪的科学”。
2. 1985年,耗散结构理论的创始⼈,诺贝尔化学奖获得者I.Prigogine提出了社会经济复杂系统中的⾃组织问题。
1988年,诺贝尔物理学奖获得者P.Anderson和诺贝尔经济学奖获得者K.J.Arow通过组织专题讨论会,提出了经济管理可以看作是⼀个演化着的复杂系统。
此后,随着研究的不断深⼊,复杂系统中所涉及的⾮线性、⾮平衡、突变、混沌、分形、⾃组织等理论在经济管理领域有了越来越⼴泛的应⽤。
元胞⾃动机1. 在复杂性和复杂系统的研究过程中,国内外学者提出了许多探索复杂性的⽅法及⼯具,其中,元胞⾃动机(cellularautomaton,CA)以其组成单元的简单规则性,单元之间作⽤的局部性和信息处理的⾼度并⾏性,并表现出复杂的全局性等特点⽽备受关注,成为探索复杂系统的⼀种有效⼯具。
2元胞⾃动机的基本理论及⽅法2.1元胞⾃动机的发展1. 20世纪50年代初,现代计算机的创始⼈冯·诺依曼(vonNeuman)为模拟⽣物发育中细胞的⾃我复制⽽提出了元胞⾃动机的雏形。
但在当时这项⼯作并未引起⼴泛的关注与重视。
2. 1970年,剑桥⼤学的J.H.Conway设计了⼀种计算机游戏———“⽣命的游戏”。
它是具有产⽣动态图案和动态结构能⼒的元胞⾃动机模型,吸引了众多科学家的兴趣,推动了元胞⾃动机研究的迅速发展。
3. 之后,S.Wolfram对初等元胞⾃动机的256种规则产⽣的所有模型进⾏了详细⽽深⼊的研究。
他还⽤熵来描述其演化⾏为,把元胞⾃动机分为:平稳型、周期型、混沌型、复杂型四类。
我国GIS发展的重要成就

我国GIS发展的重要成就回顾GIS发展的历程,我国广大科学技术人员做出了巨大的贡献,取得了许多具有标志性的成果。
一、理论探讨与方法研究近些年来,中国学者对GIS空间数据模型及建模方法进行了较为深入研究,在面向对象空间数据模型、三维空间数据模型、时空数据模型、多尺度空间数据模型等方面均取得了一批研究成果。
在国家自然科学基金会和香港研究基金会的持续资助下,中国学者针对数字地表模型多维动态构建这一国际学术前沿问题,以地理空间实体及相互间关系的抽象与表达为主线,研究了地表空间铺盖、地物空间关系理论、数字地形精度、多维动态空间数据建模、多尺度表达等基本问题,在过去的15年中,中国学者针对空间数据与空间分析的不确定性这一国际学术前沿,以不确定性的产生机制、空间分布规律、表达理论模型、传播机理和质量控制理论为主线,全面、系统研究了该领域的5个核心基础理论:位置不确定性、属性不确定性、空间关系不确定性、空间分析不确定性、质量控制。
中国学者提出了空间数据与空间分析的不确定性原理。
在位置不确定性方面,提出了一系列新的线状要素误差带理论。
空间数据的不可重复性、空间相关性和空间异质性导致了空间分析方法成为有别于经典统计学的独特理论。
针对空间分析理论这一国际科学前沿,中国学者在空间抽样和统计推断技术、空间数据分析方法、地理系统建模、空间运筹等方面研究取得显著成果。
这些成果被国内外同行广泛引用,被国际经典专著整体引用,被全国传染病预警系统和国务院应急平台采纳和运行。
近年来,我国学者在GIS地理模拟的前沿方向进行了深入研究,在地理元胞自动机(CA)和多智能体的研究方面取得了一系列成果。
最早在国际上开展CA的模拟规则的自动获取研究,解决了模型参数纠正的难题;提出了基于规划的CA模型,形成了情景分析的强有力工具,为区域土地资源的优化利用提供决策依据;利用高维特征空间的投影,解决了转换规则的非线性边界问题;首次把智能化方法引进CA模拟中,使得模拟具有自适应的能力,满足资源环境和社会经济要素复杂多变下的空间模拟和优化的需求;提出了GIS空间数据库中获取多智能体行为规则的方法;在国际上较早开展地理模拟的平行算法研究,解决了地理模拟涉及海量空间数据的瓶颈问题;最早开展CA模拟的不确定性研究,发现了模拟不确定性的时空分异规律;首次提出了“地理模拟系统”的框架体系,以弥补地理信息系统的模拟功能不足。
元胞自动机原理 最简单讲解

元胞自动机原理最简单讲解元胞自动机(Cellular Automaton,CA)是一种数学模型,由一组简单的规则组成,模拟了由离散的元胞(cells)组成的空间,并根据相邻元胞的状态进行演化和互动的过程。
元胞自动机的主要理论基础是斯蒂芬·沃尔夫勒姆(Stephen Wolfram)于1983年提出的。
它在多学科领域中得到了广泛的应用,包括复杂系统研究、计算机科学、生物学、物理学等。
元胞自动机的基本结构由网格(grid of cells)和一组规则(set of rules)组成。
网格是由一些离散的元胞(通常是正方形或六边形)组成的空间,每个元胞都具有一个状态(state)。
元胞的状态可以是离散的,例如0或1,也可以是连续的,代表某种物理量的值。
规则定义了元胞之间的相互作用方式,它描述了当周围元胞的状态发生变化时,当前元胞的状态如何更新。
元胞自动机的演化过程可以分为离散和连续两种。
在离散的情况下,每个元胞的状态在每个时刻都是离散的,不能取连续的值。
每个时刻,根据规则,元胞的状态会根据其周围元胞的状态进行更新。
更新可以是同步的,即所有元胞同时更新,也可以是异步的,即元胞按一定的顺序依次更新。
在连续的情况下,元胞的状态可以是连续的,更新过程是基于微分方程的。
元胞自动机按照规则的类型可以分为确定性(Deterministic)和随机(Stochastic)两种。
确定性的元胞自动机意味着每个元胞的状态更新是根据一条特定的规则进行的,与其他元胞的状态无关。
而随机的元胞自动机则加入了一定的随机性,元胞的状态更新可能依赖于随机的概率。
元胞自动机的一个典型应用是康威生命游戏(Conway's Game of Life)。
康威生命游戏中,每个元胞的状态只能是“存活”或“死亡”,更新规则是基于元胞周围8个邻居的状态。
根据不同的初始状态和规则设定,康威生命游戏展示了丰富多样的生命演化形态,包括周期性的振荡、稳定的构造和复杂的混沌状态。
元胞自动机简介

二、经典的元胞自动机模型
2)“生命游戏”中一些演化形态
二、经典的元胞自动机模型
2 Wolfram和他的初等元胞自动机
1)初等元胞自动机
初等元胞自动机是状态集S只有两个元素,即k=2,邻 居半径r=1的一维元胞自动机。 初等一维元胞自动机可能的8种输入状态组合 111 110 101 100 011 010 001 000
这个动态演化又由各个元胞的局部演化规则f所决定的。这 个局部函数f通常又常常被称为局部规则。对于一维空间,元 胞及其邻居可以记为S2r+1,局部函数则可以记为: F(Sit+1)=f(sti-r,…,sti,…sti+r)
sti 表示在t时刻位置i处的元胞,至此,我们就得到了一个 元胞自动机模型
对于局部规则f来讲,函数的输入、输出集均为有限集合, 实际上。它是一个有限的参照表。例如,r=1,f的形式则形似 如下:[0,0,0]->O; [0,0,1]->0; [0,1,0]->1; [1,0,0]->0; [0,1,1]->1;
2) 元胞空间元胞所Fra bibliotek布在的空间网点集合就是这里的元胞空间。
理论上,它可以是任意维数的欧几里德空间规则划分。目 前研究多集中在一维和二维元胞自动机上。对于一维元抱自 动机。元胞空间的划分只有一种。而高维的元胞自动机。元 胞空间的划分则可能有多种形式。对于最为常见的二维元胞 自动机。二维元胞空间通常可按三角、四万或六边形三种网 格排列。
010 0
001 0
000 0
1.2 结果
横轴:空间
纵轴:时间
时空分布图
2
二维基本模型
2.1模型的建立
• 考虑一个L*L的网格,对任一格子(i,j),共有三 种状态,即有一个向右行驶的车、有一个向 上行驶的车和空。行驶规则为奇数时间向右 行驶的车可以前进,且一辆车只有前方格子 里空时可前进一格。不能跟驰,偶数时间步 向上的车可以行驶,规则同右行。
基于元胞自动机-概述说明以及解释
基于元胞自动机-概述说明以及解释1.引言1.1 概述概述:元胞自动机(Cellular Automaton,CA)是一种模拟分布式系统的计算模型,由数学家约翰·冯·诺伊曼(John von Neumann)和斯坦利斯拉夫·乌拉姆(Stanislaw Ulam)于20世纪40年代末提出。
它被广泛应用于各个领域,如物理学、生物学、社会科学等,并且在计算科学中也具有重要地位。
元胞自动机模型由一系列的离散的、相互联系的简单计算单元组成,这些计算单元分布在一个规则的空间中,每个计算单元被称为细胞。
细胞根据一组规则进行状态转换,通过与其相邻细胞的相互作用来改变自身的状态。
这种相邻细胞之间的相互作用可以通过直接交换信息实现,也可以通过间接地通过规则来实现。
元胞自动机的基本原理是根据细胞的局部状态和相邻细胞的状态来决定细胞下一时刻的状态。
这种局部的状态转换会逐步扩散并影响整个空间,从而产生出复杂的全局行为。
元胞自动机非常适合用于模拟大规模复杂系统中的行为,如群体行为、自组织系统、流体力学等。
元胞自动机的应用领域非常广泛。
在物理学中,它可以用于模拟晶体的生长、相变过程等。
在生物学中,元胞自动机可以模拟细胞的生命周期、生物群体的演化过程等。
在社会科学中,它可以模拟群体行为的形成、传播等。
此外,元胞自动机还被应用于计算科学中,用于解决许多复杂的计算问题,如图像处理、数据挖掘等。
尽管元胞自动机具有许多优势和广泛的应用,但它也存在一些局限性。
首先,由于元胞自动机的状态转换是基于局部规则进行的,因此难以精确地模拟某些复杂系统中的具体行为。
其次,元胞自动机的规模和计算复杂度随着细胞数量的增加而增加,这限制了其在大规模系统中的应用。
此外,元胞自动机模型的抽象性也使得人们难以解释其内部机制及产生的全局行为。
在未来,元胞自动机仍将继续发展。
随着计算能力的提高,我们可以采用更精确的数值方法和更复杂的规则来描述系统的行为。
计算模型及其应用研究

计算模型及其应用研究随着信息技术的不断发展,计算机科学越来越成为一个有重要影响的领域。
计算模型则是计算机科学中的关键基础,其应用广泛,包括机器学习、自然语言处理、图像识别等诸多领域。
计算模型(Computational Model)是指用于描述或模拟计算过程的某种数学或逻辑框架。
它通常是一个抽象的过程模型,具有自己的语言以及描述转换规则的形式体系。
计算模型应该不仅能够容纳所有可计算性问题,而且必须是可应用于机器执行的计算模型。
计算模型有很多种,包括:图灵机、二进制码、元胞自动机、有限状态机、正则表达式等。
其中,图灵机是计算模型的代表。
它包括有限控制器(Finite Control)、读写头(Read/Write Head)、读写磁带(Tape)三部分。
读写头可以读、写和移动左、右两个方向,而控制器则可以根据读写头所在的状态和读到的字符来改变当前状态和打印字符。
读写磁带则作为“存储器”来传输信息。
借助图灵机,我们可以进行一系列的计算模拟,从而解决很多复杂问题。
例如,我们可以用图灵机来模拟人类解决算术问题的思维过程,从而判断某个问题是否可解;或者可以将图灵机用来进行计算机程序的编译和解释。
同时,在实际应用中,我们不仅需要理解计算模型,还需要掌握它们的应用方法。
以机器学习为例,它是一种基于数据驱动和模型构建的方法,在不需要人为编码的情况下自动完成模型的训练和优化。
机器学习中常用的计算模型包括神经网络、支持向量机、决策树等。
神经网络是一种模拟大脑神经元间相互作用的计算模型。
它由神经元、连接和权值三部分构成,利用反向传播算法进行训练,可以完成图像识别、语音识别等复杂任务。
支持向量机则是一种分类算法,用于将数据集合分为不同的类别。
它通过定义一个超平面来进行分类,同时使用核函数来从低维空间将数据映射到高维空间,从而实现更加复杂的模型。
总体而言,计算模型是计算机科学中的“核心部分”,它对于信息技术的发展起着重要的推动作用。
请简述 SVM(支持向量机)的原理以及如何处理非线性问题。

请简述 SVM(支持向量机)的原理以及如何处理非线性问题。
支持向量机(Support Vector Machine,SVM)是一种常用的机器学习算法,常用于分类和回归问题。
它的原理是基于统计学习理论和结构风险最小化原则,通过寻找最优超平面来实现分类。
SVM在处理非线性问题时,可以通过核函数的引入来将数据映射到高维空间,从而实现非线性分类。
一、SVM原理支持向量机是一种二分类模型,它的基本思想是在特征空间中找到一个超平面来将不同类别的样本分开。
具体而言,SVM通过寻找一个最优超平面来最大化样本间的间隔,并将样本分为两个不同类别。
1.1 线性可分情况在特征空间中,假设有两个不同类别的样本点,并且这两个类别可以被一个超平面完全分开。
这时候我们可以找到无数个满足条件的超平面,但我们要寻找具有最大间隔(Margin)的超平面。
Margin是指离超平面最近的训练样本点到该超平面之间距离之和。
我们要选择具有最大Margin值(即支持向量)对应的决策函数作为我们模型中使用。
1.2 线性不可分情况在实际问题中,很多情况下样本不是线性可分的,这时候我们需要引入松弛变量(Slack Variable)来处理这种情况。
松弛变量允许样本点处于超平面错误的一侧,通过引入惩罚项来平衡Margin和错误分类的数量。
通过引入松弛变量,我们可以将线性不可分问题转化为线性可分问题。
同时,为了防止过拟合现象的发生,我们可以在目标函数中加入正则化项。
1.3 目标函数在SVM中,目标函数是一个凸二次规划问题。
我们需要最小化目标函数,并找到最优解。
二、处理非线性问题SVM最初是用于处理线性可分或近似线性可分的数据集。
然而,在实际应用中,很多数据集是非线性的。
为了解决这个问题,SVM引入了核函数(Kernel Function)。
核函数可以将数据从低维空间映射到高维空间,在高维空间中找到一个超平面来实现非线性分类。
通过核技巧(Kernel Trick),SVM 可以在低维空间中计算高维空间中样本点之间的内积。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2
非线性核学习机与地理元胞自动机
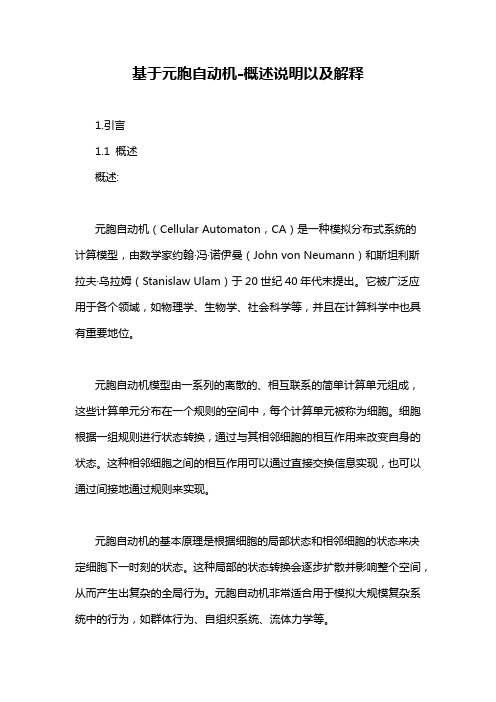
核学习机是在通过核函数产生隐含的高维 特征空间中 , 利用线性技术设计出非线性的信 息处理算法 , 为解决复杂非线性问题提供了一 个简单有效的方法。目前 , 基于核化原理的方 法已成为机器学习的研究热点 , 并在许多领域 中取得了成功的应用 , 而国内对这方面的研究 还刚刚起步。核学习机主要包括 核 Fisher 非 线 性判别、支持向量机以及核主成分分析 , 许多 研 究 表 明 [12, 13], 核 Fisher 判 别 的 性 能 要 优 于 支 图 1 线性 Fisher 判别 持 向 量 机 及 核 主 成 分 分 析 。 本 文 选 取 核 Fisher Fig. 1 Linear Fisher discriminant analysis for 判别方法来自动提取地理元胞自动机的转换规 classification 则。 对于线性可分问题 , 传统的线性 Fisher 判别方法的判别能力得到了普遍认可。 Fisher 准则是依据类间均值与类内方差总和之比为极大的决策规则。它的基本思想是投影 , 即 把 j 类的 d 维数据投影到某一个方向 , 使得变换后的数据 , 相同类别的点尽可能集聚在一 起 , 不同类别的点尽可能分离 , 以此达到分类的目的。图 1 是最简单的 Fisher 二维变量 线性判别原理图。在图 1 中 , 有两类数据 Class1、 Class2, 在 X1 和 X2 轴 方 向 上 的 投 影 都 有不同程度的重叠 , 因此 , 彼此并不能较好的区分开来。 Fisher 线性判别就是找到一条直 线 Y 为坐标轴 , 使得两类数据 Class1、 Class2 的中 心 在 直 线 Y 轴 上 的 投 影 点 间 距 Y1、 Y2 最大 , 两类数据在 Y 轴上投影的重叠部分达到最小 , 这样 , 通过 Y1、 Y2 中点的垂线就能 把两类数据 Class1、 Class2 较好的区分开来。 但地理现象属于复杂的非线性问题 , 简单的线性判别分析无法有效地区分不同特征 的样本。在这种情况下 , 构造判别函数时可以采用复杂的非线性判别函数 , 但具体实现 时却很困难 [14]。针对这种情况 , Mika 等在 1999 年提出核 Fisher 判别方法 [12], 其基本思路 是通过某一非线性变换把属性空间的向量映射到高维特征空间 , 并在高维特征空间中利 用 Fisher 线性判别找出一个最优投影方向 , 这样就隐含地实现了原输入空间的非线性判 别 , 其基本原理见图 2 。 假设数据 X 包含 N 个 d 维样本 , 即 X = {x1, x2, … , xN} , 其中 N1 个属于 w1 类的样本 记为 X1 = {x1 , x2 , ..., xN } , N2 个属于 w2 类的样本记为 X1 = {x1 , x2 , ..., xN } , 为了实现非
收稿日期 : 2005-08-30; 修订日期 : 2005-12-07 基金项目 :
国家杰出青年基金项目 (40525002); 国家自然科学基金项目 (40471105);“ 985 工程”GIS 与遥感的地学应 用 科 技 创 新 平 台 项 目 (105203200400006) [Foundation: National Outstanding Youth Foundation of NSF of China, No.40525002; National Natural Science Foundation of China, No.40471105;“ 985 Project” of GIS and Remote Sensing for Geosciences from the Ministry of Education of China, No.105203200400006]
1 2
1
1
1
2
2
2
6期
刘小平 等 : 从高维特征空间中获取元胞自动机的非线性转换规则
665
图 2 投影到高维空间的核 Fisher 非线性判别
Fig. 2 Kernel-based nonlinear Fisher discriminant analysis for classification through projection
j
J (a) = aT Pa a Qa
式中 : P、 Q 是特征空间 F 中经过核函数转化后的相应矩阵 , 即 :
T
(5)
P = (P1 - P2) (P1 - P2)T
2 Nj
(6) (7)
j
Q=
j = 1 i = 1
! !(K
Nj k i = 1
j i
- Pj) (Ki - Pj)T
j i j
j
1
前言
元胞自动机 (CA) 是由 Ulam 在 20 世纪 40 年代提出 , 具有强大的空间模拟能力 , 常 用于自组织系统演变过程的研究。它 “自下而上”的研究思路充分体现了复杂系统局部 的个体行为产生全局、有秩序模式的理念。近年来 , 随着元胞自动机理论的深入 , 国际 上许多学者开展了元胞自动机在城市发展动态增长方面的研究 [1-4]。国内也有不少学者进 行了系统的 CA 城市模拟研究 [5-8]。这些研究表明 , 通过简单的局部转换规则可以模拟出 复杂的城市空间结构。体现了 “复杂系统来自简单子系统的相互作用”这一复杂性科学 的精髓 , 为城市发展理论提供了可靠依据。 转换规则的定义是 CA 模型的核心。在利用 CA 模拟城市系统时 , 往往需要选取系列 空间变量 , 这些空间变量所对应的参数值决定了各变量对模型的 “贡献” 。转换规则定义 的关键则是如何确定合适的空间变量参数值 , 对模型参数进行纠正 , 以模拟出与实际情 况 相 符 的 城 市 形 态 。 目 前 , 有 关 CA 模 型 参 数 纠 正 的 方 法 不 多 , 并 且 存 在 一 定 的 缺 陷 。 Clarke 提出了利用肉眼判断的方法来获取模型参数值 [9]。该方法受主观因素影响很大 , 可 靠程度有限 , 当空间变量较多时 , 有非常多的参数值组合方案。 Wu 和 Webster 曾提出利 用层次分析法 (AHP) 来确定模型参数值 [10], 后来 , Wu 又提出使用线性 logistic 回归的方 法来获取模型参数值 [2], 这类方法非常简单实用 , 从而得到了较为广泛的应用 , 但是 , 用 线性的方法提取复杂的地理现象规律 , 显得过于简单。 Li 和 Yeh 提出了利用神经网络训
其中 , Pj = (Pjk)k=1, 2, …, N, Pjk = 1 N
!K(x , x ),
Ki = K(xk, xi ) , 式 (5) 即为核 Fisher 判别函
666
地 理 学 报
61 卷
数。使式 (5) 取极大值时的特征向量 aopt 就是所寻找的最佳投影方向 , 即 :
(8) aopt = arg max(J(a)) = Q-1(P1 - P2) 值得注意的是 , 式 (8) 在具体求解的时候可能无解 , 因数值问题会导致矩阵 Q 非正 定 , 此外 , 也需在特征空间 F 采取某种方法控制 Q, 在这里有必要对 Q 做正则化处理 [13]: (9) Q! = Q + !I 式中 : ! 为正常数 , I 为单位矩阵。则任意一个测试样本 x 在最佳投影方向 aopt 上所求取的
第 61 卷 第 6 期 2006 年 6 月
地 理 学 报
ACTA GEOGRAPHICA SINICA
Vol.61, No.6 June, 2006
从高维特征空间中获取元胞 自动机的非线性转换规则
刘小平 , 黎 夏
( 中山大学地理科学与规划学院 , 广州 510275)
摘 要 : 元 胞 自 动 机 (CA) 具 有 强 大 的 空 间 模 拟 能 力 , 能 够 模 拟 和 预 测 复 杂 的 地 理 现 象 演 变 过 程 。 CA 的 核 心 是 如 何 定 义 转 换 规 则 , 但 目 前 CA 转 换 规 则 获 取 往 往 是 基 于 线 性 方 法 来 进 行 , 例 如 采 用 多 准 则 判 断 (MCE) 技 术 。 这 些 方 法 较 难 反 映 地 理 现 象 所 涉 及 的 非 线 性 等 复 杂 特 征 。 为此提出了利用新近发展的核学习机来获取地理元胞自动机非线性转换规则的新方法。该方 法是通过核函数产生隐含的高维特征空间, 把复杂的非线 性 问 题 转 化 成 简 单 的 线 性 问 题, 为 解决复杂非线性问题提供了一种非常有效的途径。利用所提出的方法自动获取地理元胞自动 机的转换规则, 不仅大大减少了建模所需的时间, 也较好地反映地理现象复杂的特性, 从而 改善了 CA 模拟的效果。 关键词 : 元胞自动机 ; 转换规则 ; 非线性 ; 核学习机 1978- ) ,男,湖南邵阳人,博士生,主要从事定量遥感和地理信息系统模型研究。
E-mail: yiernanh@163.com
通讯作者 : 黎夏, 男, 教授, 博导, 从事遥感和地理信息系统研究。E-mail: lixia@mail.sysu.edu.cn
663-672 页
664
地 理 学 报
61 卷
练的方法自动获取 CA 模型的参数值 [6], 不足的是 , 神经网络存在过学习 , 局部最小值和 收敛速度慢的问题 , 属于黑箱结构 , 对模型参数的物理意义难以解释。 Li 和 Yeh 随后又 提出了利用决策树的方法来获取 CA 的参数值 [11], 这种方法产生的决策规则较多 , 选择合 适的决策规则较为费时。 本 文 提 出 了 利 用 新 近 发 展 的 核 学 习 机 来 自 动 获 取 CA 模 型 参 数 值 和 规 则 的 新 方 法 。 核学习机通过核函数产生隐含高维特征空间 , 在高维特征空间具有把复杂的非线性特征 转化为简单线性特征的能力 , 因此 , 非常适合提取复杂地理现象的规律 , 并比常规的非 线性方法简单实用。地理元胞自动机往往涉及到大量的空间数据 , 不同的空间数据存在 复杂的关系 , 利用核学习机自动获取地理元胞自动机的转换规则 , 能方便、准确的反映 出不同空间数据的复杂关系。目前 , 核学习机应用在地学中的研究非常少 , 还没有核学 习机应用在 CA 模型中的研究报道。