元胞自动机交通流模型.共35页文档
交通流元胞自动机模型的解析与应用研究
交通流元胞自动机模型的解析与应用研究元胞自动机是近年来兴起的用于交通流建模的重要工具,本文围绕一维交通流元胞自动机模型,从理论和应用两个方面展开研究。
相对于应用研究,元胞自动机交通流模型的理论研究比较匮乏,这是本文研究的重点,完成了以下工作:(1)元胞自动机模型“基于规则,自底向上”的特点,导致解析研究非常困难。
本文进行了开放边界NS模型的解析研究,根据模型的微观规则解释了宏观现象产生的机理,首次证明了在标准边界条件下,该模型几个重要的宏观统计量,包括入境流量、道路通行能力、全局密度、畅通/阻塞状态下的密度剖面等都存在精确的解析结果。
对扩展左边界条件,本文提出了一种更简洁的入境流量解析化方法,同时给出了密度剖面的解析结果。
(2)元胞自动机模型与车辆跟驰模型之间的区别和联系是理论研究中屡屡被提到的问题。
本文选取最优速度模型与VDR模型进行了比较研究。
首先通过对模型规则的分析,证明了确定NS模型是OV模型的一种离散形式。
随后针对两模型更复杂的具体形式,使用数值仿真的手段,从基本图和交通流演化两方面进行了对比研究。
应用方面,本文包括以下两方面的研究:(1)对于任何一个动态系统,动态特性和稳态特性有着同样重要的意义。
本文使用VDR模型构建了一条仿真道路,将入境流量视为系统的输入、道路上车辆的全局密度作为输出,用数值仿真的方法研究了在输入信号变化时系统输出的动态和稳态过程,发现在自由流状态下,系统的响应十分迅速,稳态过程非常平稳。
而在阻塞状态下,系统响应迟缓,而且出现了超调和周期震动等现象。
对交通系统动态特性的考察,是以往研究中少见到的。
(2)国内道路上最常见的交通形式是机非混行,现有的机非混合模型往往将机动车和非机动车采用同样的处理方式。
本文采用两种不同的元胞自动机模型来分别描述机动车和自行车的行为,根据实测结果,用摩擦干扰和阻滞干扰体现自行车对机动车的干扰作用,建立了自行车干扰下机动车交通流模型并利用数值模拟研究了其行为。
双向航道船舶交通流元胞自动机模型及仿真

双向航道船舶交通流元胞自动机模型及仿真
双向航道船舶交通是指船舶在一个双向航道中相互交错行驶的交通模式。
在双向航道中,船舶需要遵守严格的通航规则,以保证交通顺畅和安全。
为了研究双向航道船舶交通
流的行为和性质,可以采用元胞自动机模型进行仿真。
元胞自动机是一种离散动力学系统模型,它通过将空间划分成小的元胞,并规定每个
元胞的状态和规则来模拟系统的演化过程。
在双向航道船舶交通流的元胞自动机模型中,
每个元胞代表一个船舶,并具有状态、位置、速度等属性。
模型中的规则包括通航规则和
动力学规则。
通航规则描述了船舶在双向航道中的行驶规则,例如限速、交叉时互相避让等。
通过
定义船舶的状态和位置,可以根据通航规则决定船舶的行驶方向和速度。
如果两艘船舶在
交叉口相遇,根据通航规则,先来先行,可以决定哪个船舶可以继续前进。
动力学规则描述了船舶的运动方式和速度变化规律。
船舶的运动受到水流、风力、操
纵力等影响,可以根据这些因素来确定船舶的加速度和速度变化。
通过模拟船舶的运动,
可以研究船舶交通流的行为和性质。
通过元胞自动机模型进行双向航道船舶交通流的仿真,可以得到交通流的密度、流量、速度等统计数据,并进行可视化展示。
这些数据可以用于评估航道的通行能力和安全性,
优化航线规划和交通管制措施,提高航道交通的效率和安全性。
双向航道船舶交通流元胞自动机模型及仿真是一种研究航道交通流行为和性质的有效
方法,可以为航道管理和交通控制提供科学依据和决策参考。
智能交通系统的元胞自动机交通流模型
P3
vn( t ) = 0
其中 vn ( t ) , x n ( t ) 分别表示第 n 辆车在 t 时刻的速 度和位置, dn ( t ) = xn+ 1 ( t ) - x n ( t ) - 1 表示车间距,
bn ( t ) = 1( 0) 表示第 n 辆车刹车灯是开 ( 关) , P 1,
P2 , P3 是针对不同条件下的概率. 定义有效间距为
本文基于应用 ITS 信息的考虑, 在 NS 模型的基 础上提出了一个改进的元胞自动机模型, 并且考虑 了刹车灯的有效作用 及引进了可变安全间距 的概 念[ 17] . 通过数值模拟, 将改进的 ITS 元胞自动机模 型以及改 进模 型的非 预期效 应与 NS 模 型作了 比 较. 同时考虑 了有两种不同 车种混 合对交通 流的 影响.
下面我们引进随机慢化函数 P :
10 期
葛红霞等: 智能交通系统的元胞自动机交通流模型
46 23
P( vn ( t ) , dn ( t ) , bn+ 1 ( t ) ) P1 bn+ 1 ( t ) = 1 和 v n ( t ) > dn ( t )
= P2 bn+ 1 ( t ) = 0 和 v n ( t ) > dn ( t ) .
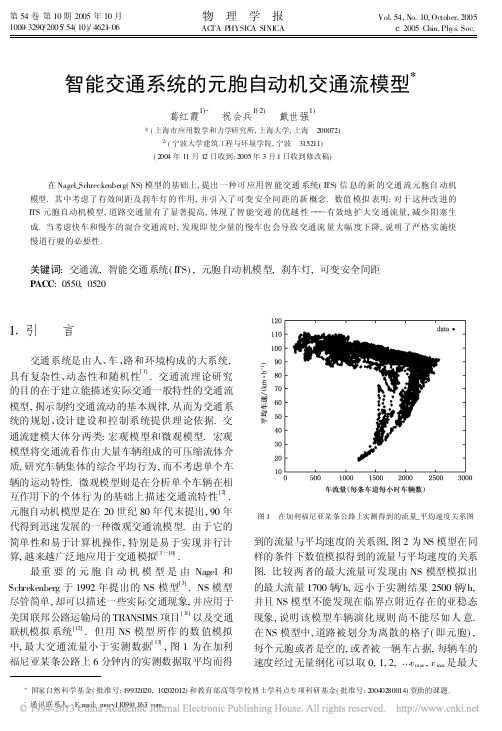
随着社会文明化程度不断提高, 人们对交通的 需求也与日俱增, 与此同时智能交通运输系统( 简称 ITS) 应运而生, 它是在交通流基础理论研究的前提 下, 将先进的信息技术、数据通信技术、电子控制技 术以及计算机处理技术有效的综合应用于地面交通 管理体系, 从而建立起一种大范围、全方位发挥作用 的, 并且实时、准确、高效的交通管理体系[ 2] . 驾驶 员通过反馈回来的信息, 有助于自己调节当前的车 速. 并且有 助于 增大 交通 流量, 减少 交通 阻塞 的 形成.
交通流复杂动态特性元胞自动机模型研究
三.结论和展望(第五章)
交通流复杂动态特性元胞自动机模型研究
(一) 交通流理论研究的意义和背景
交通流复杂动态特性元胞自动机模型研究
交通系统的重要性与当前存在的问题
➢ 交通运输在社会经济中占据了越来越重要的地位 ➢ 交通事故、交通拥堵以及由此带来的环境污染等问题已经成为困扰着世界
各国的普遍性问题
交通流复杂动态特性元胞自动机模型研究
德国高速公路上实测得的流量-密度关系图(基本 图)
➢ 交通实测的主要方法:航拍,跟驰车,埋设在道路 上的探头。其中探头方法最为常用
➢ 自由流区域,拥挤区域,亚稳态区域(自由流区域 与拥挤区域的重叠区域)
交通流复杂动态特性元胞自动机模型研究
交通流理论模型的分类
根据不同的研究方法,交通流理论模型主要分成 以下三类:
在零态,如果道路B支配了系统的通行能力
➢ 相似地,有qB=QB,另一方面,qB=0.5qs+qd=λc (1-Sdyn)/2+λc Sdyn=λc (1+Sdyn)/2,其中qd是动态车的平均流量。所以λc (1+Sdyn)/2=QB,即 λc=2QB/(1+Sdyn)
交通流复杂动态特性元胞自动机模型研究
➢ 宏观方法:不关心单个车辆的特性,利用流体力学的方 法研究道路上所有车辆的集体平均行为--流体力学连续 模型
➢ 微观方法:从单个车辆的动力学行为入手,通过考察单 个车辆之间的相互作用,推导出整个系统的统计性质-车辆跟驰模型、元胞自动机模型
➢ 介观方法:将交通流中的车辆看成具有相互作用的粒子, 然后利用分子动理论对交通进行来研究--气体分子动理 论模型
交通流复杂动态特性元胞自动机模型研究
描述交通流特性的三大基本参数
交通流理论-元胞自动机模型

主讲人: 李新刚 办公地点:8710(51684936) Email: lixingang@
元胞自动机交通流模型
• 主要内容
1 绪论 2 元胞自动机的定义和构成 3 184号规则 4 NS模型简介 5 BML模型简介 6 双车道模型简介
1 绪论
Stephen Wolfram. A New Kind of Science. Wolfram Media, 2002.
2 元胞自动机的定义和构成
B. 元胞空间边界条件
理论上,元胞空间是无限的;实际应用中无法达到 这一理想条件。常用的边界条件如下:
• • • •
周期型 定值型 绝热型 反射型
2 元胞自动机的定义和构成
B. 元胞空间边界条件
•
周期型边界条件(periodic boundary)
定义:周期型是指相对边界连接起来的元胞空间
2 元胞自动机的定义和构成
元胞自动机的定义:
元胞自动机(Cellular Automata,简称CA)实质 上是定义在一个由具有离散、有限状态的元胞组 成的元胞空间上,并按照一定的局部规则,在离 散的时间维度上演化的动力学系统。
2 元胞自动机的定义和构成
元胞自动机的构成:
元胞自动机最基本的组成:元胞、元胞空间、邻居及规 则四部分。另外,还应包含状态和时间。 可以视为由一个元胞空间和定义于该空间的变换 函数所组成。
1 绪论
元胞自动机应用
交通科学领域:1986年,M. Cremer和J. Ludwig初次将元 胞自动机运用到车辆交通的研究中。随后,元胞自动机在车 辆 交通中的应用主要沿着两条主线展开:对城市道路交通流 的研究,以Nagel-Schreckenberg模型为代表;对城市交通网 络 的研究,以BML模型为代表。另外,80年代以来,计算机 水平日新月异的发展为元胞自动机的 应用提供了强有力的支 持。因此,在进入上个世纪90年代后,元胞自动机在交通流 理论研究领域中得到了广泛的应用。
基于元胞自动机的城市交通网络模拟模型
二、基于元胞自动机的基本交 通模型
2.1一维模型
2.1.1模型的建立
考虑一个有等长的L个格子的线段,每个格子可 有一个向右行驶的车或为空。行驶规则为:若前 方格子有车,则停止。若前方为空,则前进一格, 不能跟驰。采用周期边界,此即为NS模型(1992)
即:f为:
T 111 110 101 100 011 010 001 000
基于元胞自动机的城市交通网络模拟模型
大连理工大学
张名举 刘勤一 孙宇哲 指导教师 贺明峰
• 本工作的目的是探讨利用元胞自动机模拟 城市交通的可能性,给出了一个可行的理 论与方法框架,并通过具体交通网络(局 部)的计算机模拟,说明了该模拟模型的 有效性,得到一些有效的结果及一些可以 进一步探讨的问题。
• 4.4 边界条件
1.闭合边界 2.周期边界 3.开放边界
• 4.5 结果
• 下图为大连市交通网络的一个局部
• 其拓扑图如下:
• 上图中已根据具体情况将路段分类,现 考虑在封闭边界条件下,考虑不同转弯
机制及交叉口策略组合对交通效率的影 响。
五 进一步可讨论的问题
• 5.1立交桥问题。 • 5.2超车问题 • 5.3停车场问题 • 5.4边界问题(周期边界,开放边界) • 5.5交叉口局部的CA模型 • 5.6红绿灯的协调问题 • 5.7改善路段作用的模拟 • 5.8增加路段作用的模拟
• 3.3.2 结果
• 3.3.3 快照
• 3.4 二维三向模型
3.4.1模型
对L*L网格中的任意(i,j)有四种状态,空,右,左,上, 下。即为比BML模型多一种斜行机制,此时每三个时 间段为一个计量单位。依次为右行,上行,斜行。
• 3.4.2 结果
分路段交通状态模式元胞传递模型

分路段交通状态模式元胞传递模型随着城市化进程的不断加快,城市交通问题日益凸显。
交通拥堵、交通事故等问题频频出现,给城市发展带来了巨大的挑战。
为了解决这些问题,交通研究领域不断探索新的方法和技术。
其中,基于元胞自动机的交通模拟技术成为了研究热点之一。
本文将介绍一种基于元胞自动机的交通模拟模型——分路段交通状态模式元胞传递模型,并探讨其在城市交通管理中的应用。
一、元胞自动机模型元胞自动机(Cellular Automata,CA)是一种由几何结构、状态集合、状态转移规则和边界条件等组成的离散动力学模型。
它的基本思想是将空间划分为若干个小区域,每个小区域称为“元胞”,每个元胞具有一定的状态,状态之间通过某种规则进行转移,模拟系统的动态演化过程。
元胞自动机模型在交通领域的应用主要是基于其离散化、并行化和动态演化等特点,可以模拟交通流的运动和变化。
由于交通流具有高度的非线性和随机性,因此需要采用一些特殊的元胞自动机模型来模拟交通流的运动和变化。
二、分路段交通状态模式元胞传递模型分路段交通状态模式元胞传递模型(Cellular Automata Model for Traffic State Pattern in Segments,CATSPS)是一种基于元胞自动机的交通模拟模型。
它将道路划分为若干个小区域,每个小区域称为“路段”,每个路段具有一定的状态,状态之间通过某种规则进行转移,模拟交通流的运动和变化。
CATSPS模型的基本思想是将交通流分为若干个状态,每个状态具有一定的速度和密度,通过某种规则进行转移。
模型中的状态分为三类:自由流状态、拥堵状态和停车状态。
自由流状态表示交通流畅通,速度较快;拥堵状态表示交通流受到一定程度的阻碍,速度较慢;停车状态表示交通流完全停止。
CATSPS模型的状态转移规则主要考虑了路段之间的影响和交通流的动态演化。
具体地,模型中每个路段的状态转移规则如下:1. 自由流状态转移规则当路段i处于自由流状态时,其速度可以通过以下公式计算: v[i] = vmax * (1 - (n[i] / nmax) ^ β)其中,v[i]表示路段i的速度,vmax表示路段i的最大速度,n[i]表示路段i的车辆密度,nmax表示路段i的最大车辆密度,β表示路段i的拥堵程度。
元胞自动机交通流模型

二、NS 模型
在第184号规则的基础上,1992年,德国学者 Nagel和Schreckenberg提出了一维交通流CA模型, 即,NS 模型(或NaSch模型) Nagel and Schreckenberg. A Cellular automaton model for freeway traffie.Journal of Physics(France),1992 CA模型最基本的组成包括四个部分:元胞(cell )、 元胞空间(lattice)、邻域(neighbor)及更新规则 (rule)。
d) 延迟加速 4)位置更新:车辆前进
例:设
vmax 2
a)加速过程
b)安全刹车过程
c)随机慢化过程
(以随机慢化概率p)
d)位置更新
在NS 模型的基础上,又陆续地提出了一系列一维 CA交通模型,如TT、BJH、VDR、FI等模型; 双车道CA交通模型:STNS模型 机非混合CA模型: CCA模型 城市路网CA二维模型: BML、CTM模型
场科学变革。
Free online access: /
90号规则:分形结构 ——CA_rule_90.m
110号规则:复杂结构 ——CA_rule_110.m
§2 元胞自动机交通流模型
一、第184号规则 特别注意:第184号规则
100 90 80
初始 随机
×7.5m
随机慢化概率p=0.2;密度ρ=27veh/km/lan(0.2);
初始 均匀 分布
×7.5m
随机慢化概率p=0.2;密度ρ=33veh/km/lan(0.25);
×7.5m
交通流CA模型的主要优点:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
56、死去何所道,托体同山阿。 57、春秋多佳日,登高赋新诗。 58、种豆南山下,草盛豆苗稀。晨兴 理荒秽 ,带月 荷锄归 。道狭 草木长 ,夕露 沾我衣 。衣沾 不足惜 ,但使 愿无违 。 59、相见无杂言,但道桑麻长。 60、迢迢新秋夕,亭亭月将圆。
谢谢
11、越是没有本领的就越加自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我