元胞自动机交通流模型
基于二维元胞自动机的交通流模拟分析
4 . 2 自组 织 现 象
梅
宏 ,等 :基 于二 维元胞 自动机 的 交通 流模 拟 分析
4 5
在 实际交 通 网络 中 , 经 常 出现交 通 阻 塞 现象 ,车辆 密 度 越 高 阻 塞越 严 重 ,只 要 车 辆按 交 通 规 则 行进 , 车辆 密度 一定 时 间 内不 增 加很 多 ,经 过 足够 长 时 间 必会 自行 解 决交 通 阻 塞 现象 ,称 之 为 系统 的 自组 织性 . 从 程 序仿 真 中可 以清 晰看 到 ( 见图 5 ) , 平 均 速 度 接 近 于零 时 , 也 即几 乎 没有 车辆 行驶 ,但 随 着 迭代 步 数 的 增 多 ,系统 多数会 自身调 整 ,逐步 解 开阻塞 状 态 ,恢 复 自由运 动 ,而且 速度 逐步 提高 , 最 后趋 于稳 定.
2:2 21 D L E T ON A A, L E VI NE D .S e l f Or g a n i z a t i o n a n d a D y n a mi c a l T r a n s i t i o n i n Tr a f f i c F l o w Mo d e l s E J ] .
5 研 究 结 论
针 对 二 维 路 网交 通 流 ,本 文 首 先 利 用 经 典 B MI 模 型 重现 了有 关 网格交 通 流 的 自由相 、堵 塞 相 等典 型 车 流
状 态 ,验证 了交 通 流各 种 状 态 随 车 辆 密度 增 大 引发 的相
图 6 1 2 8×1 2 8交 通 网络 不 同 红 灯 周 期
E 5 ] 葛红霞 , 祝 会 兵 ,戴 世 强 .智 能 交 通 系 统 的 元 胞 自动 机 交 通 流 模 型 E J ] .物 理 学 报 , 2 o o 5 ,5 4 ( 1 0 ) : 4 6 2 1 —4 6 2 6 . [ 6 ] 刘小 明 , 李 颖 宏 ,陈 昱 ,等.基 于 改 进 B ML模 型 的交 通 事 故 下 路 网 交 通 运 行 状 态 分 析 [ J ] .交 通 运 输 系 统 工 程 与 信
元胞自动机交通流模型.课件

模拟结果中流量与密度关系的曲线可以用来指导城市交通规划。在规划道路时,应考虑车辆密度对交通 流量的影响,合理设置道路宽度和车道数量。
模拟结果的比较与评价
不同模型之间的比较
我们将元胞自动机交通流模型的结果与其他经典交通流模型进行了比较。通过比较发现 ,元胞自动机模型能够更好地模拟实际交通情况,特别是在复杂路况和多车道情况下的
物流配送
利用元胞自动机模型模拟物流配 送过程中的车辆行驶和货物运输 ,优化配送路线和策略。
公共安全
元胞自动机模型可用于模拟人群 流动和应急疏散,为公共安全事 件提供决策支持。
环境影响评估
通过模拟污染物在环境中的扩散 和迁移,元胞自动机模型有助于 评估环境影响和制定环境保护措 施。
元胞自动机交通流模型的未来研究方向
元胞自动机的应用领域
交通流模拟
元胞自动机可以模拟和分析交通流的 行为和特性,如拥堵现象、车速分布 等。
城市规划
元胞自动机可以用于模拟城市的发展 和演化,预测城市扩张和人口分布等 。
生态学
元胞自动机可以用于模拟生态系统的 行为和演化,如物种竞争、群落演替 等。
社会学
元胞自动机可以用于模拟和分析社会 现象,如人口迁移、群体行为等。
表现更优。
模型的优缺点分析
元胞自动机交通流模型具有简单、易实现和可扩展性强的优点,但也存在计算量大、模 拟结果受参数设置影响较大的缺点。在实际应用中,需要根据具体需求和条件选择合适
的模型。
05
CHAPTER
元胞自动机交通流模型的应 用前景与展望
元胞自动机交通流模型在交通规划与管理中的应用前景
交通流模拟
阻塞波传播
在模拟中,我们观察到了阻塞波 在道路上的传播现象。当一辆慢 车出现时,后面的车辆会逐渐减 速并形成阻塞波,导致交通拥堵
考虑驾驶愤怒的元胞自动机交通流模型
性, 相对 于其 他 交通 流 模 型 , 如 运 动学 模 型 , 车 辆 跟驰模 型 , 流体 动力 学模 型_ 6 等 有 明显 的优 势. 由 大量 车辆 组成 的 交 通 流实 际上 是 一 个 连续 时 间 、 离散 事件 的混 杂 系统 . 因此 采 用 本 质 上 离 散 ( 时
础上, 考虑愤怒驾驶行 为的特点 , 从运行速度 、 换 道 条 件 和 安 全 距 离 3个 方 面 重 新 确 定 元 胞 更 新 规 则, 构 建 考 虑 驾 驶 愤 怒 情 绪 的 周 期 边 界 条 件 下 双 车 道 元 胞 自动 机 交 通 流 模 型 . 在 MAT L AB环 境 下, 对 所 建 模 型与 普 通 N a S c h交 通 流模 型进 行 对 比仿 真 分 析 . 结果表 明, 驾 驶 愤 怒 所 引 起 的 行 驶 速
摘要 : 驾 驶 员 在愤 怒 时 的 驾 驶 行 为 表 现 与 正 常 驾 驶 时 存 在 较 大 的 差 异 , 这 些 行 为 差 异 会 影 响 车 辆
的运行速度 、 运行轨迹 等 , 进 而 对 道 路 交 通 流产 生影 响. 文 中在 N a S c h元 胞 自动 机 交 通 流模 型 的基
了驾 驶 愤 怒 表 现 清 单 ( d r i v i n g a n g e r e x p r e s s i o n i n v e n t o r y , D AX) , 反 映驾驶 人 表 达愤 怒 的 4种 方 式: 言语 攻 击 、 人身攻击、 用 车辆 表 达 愤 怒 和 自我
度 变化 对交 通 流 影 响 明 显 .
关 键词 : 交通流 ; 驾驶愤怒 ; 元 胞 自动 机 ; 仿 真
融合多源信息的元胞自动机交通流模型

融合多源信息的元胞自动机交通流模型随着城市化进程的不断发展和交通流量的快速增长,如何合理优化城市交通系统成为了亟待解决的问题。
为了解决交通流量管理中遇到的挑战,研究人员开始使用元胞自动机交通流模型作为一种有效的工具。
元胞自动机交通流模型结合了多源信息,并能够对城市道路网络中的交通流进行模拟和预测。
本文将重点介绍融合多源信息的元胞自动机交通流模型,并详细分析其优势和应用前景。
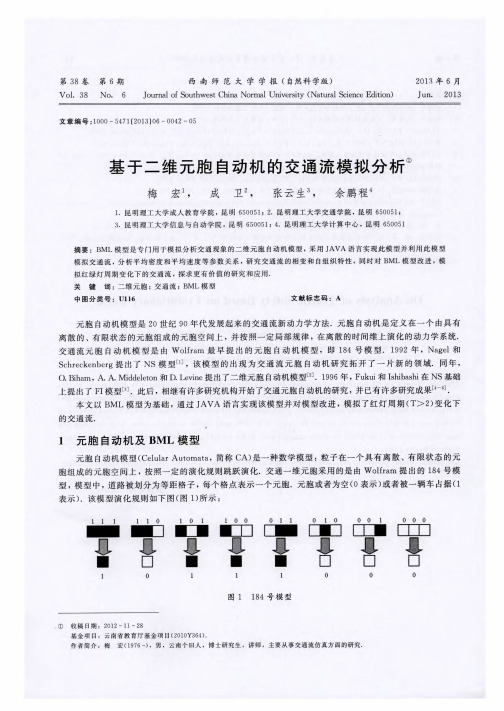
一、元胞自动机交通流模型简介元胞自动机交通流模型是一种基于交通流动的个体自动行为的模拟方法。
它将整个道路网络划分为多个元胞,每个元胞代表一个交通单元,如车辆或行人等。
通过定义元胞之间的规则和交互方式,模型可以刻画城市道路系统中的交通流动情况。
元胞自动机交通流模型使用自动机理论和网络拓扑结构相结合的方法,具有模拟真实交通行为的优势。
二、多源信息融合的意义和方法多源信息的融合对于提高交通流模型的准确度和预测能力至关重要。
常见的多源信息包括道路网络拓扑结构、车辆速度、交通信号灯状态、道路岔口等。
通过合理融合这些信息,可以更好地模拟城市交通流动的实际情况。
在元胞自动机交通流模型中,多源信息融合的方法主要包括以下几种:数据融合、模型融合和参数融合。
数据融合是将来自不同数据源的交通数据进行处理和整合,以获取全面准确的信息。
模型融合是将不同类型的交通模型进行整合,并基于多种模型的结果进行预测和优化。
参数融合是将不同参数的评估结果进行整合,以获取更加全面和准确的评估结果。
三、融合多源信息的元胞自动机交通流模型的优势融合多源信息的元胞自动机交通流模型相比传统模型具有以下优势:1. 准确性提高:多源信息的融合使得模型更加贴近真实交通情况,模拟结果更准确可靠。
2. 鲁棒性增强:多源信息的融合使得模型对于数据噪声和不确定性具有更好的适应和鲁棒性。
3. 预测能力增强:多源信息的融合使得模型在预测和优化交通流方面具有更高的准确性和可信度。
四、融合多源信息的元胞自动机交通流模型的应用前景融合多源信息的元胞自动机交通流模型在城市交通系统优化和管理中具有广阔的应用前景。
基于速度密度特性的元胞自动机城市交通流模型
oe s d.Th mprv d mo e a i e i o e d lC smMaeu b a r i o pefr be.T e p p rito u e l y a c lt c n t r a r d t  ̄cf w r ea l h a e nr e ste d n mi at e n o a l d 1 i
摘 要 : 针 对城 市道路 路段 上 车流 的流 量和 密度之 间的特性 , 道路元 胞 自动机 交通 流 对 模 型进 行 了改进 , C 使 A模 型 能够 较 好 模 拟城 市道 路 交通 流 . 出 了 网格 动 态 调 整 算 提 法 , 算 法根 据模 型模 拟 的路段 流 量和 密度计 算车 辆平 均通行 距 离, 该 并以此 距 离动 态调 整C A模 型 的格 子长度 . 照城 市道路 路段 上 车辆速 度 的统计 分布 规律 , 按 以路段 的车 流 速度 密度模 型输 出作 为 下步模 拟 的平均 车速 , 过 车辆 速 度 的 分布 范 围确 定车 辆加 速 通 减速 的概 率 , 对模 型 车速进 行更 新 .选择 50米长 的城 市主 干道 上 的一 条 车道 , 用本 0 利 文改进 的 C A模 型进 行模 拟 , 模拟 结果表 明 : 该模 型在 车速 为 3 ~6 0 5公里/ 小时 范围 内 , 能较好 模拟城 市道路上 车 流 的运 行特 性 . 改进后 的 C A模 型 , 用于对城 市道路 上 中速 适ຫໍສະໝຸດ V0 . No. 16 3
Jn 2 o ue 06
文 章 编 号 :10 — 4 (06 307 — 096 4 20 )0—0 1 4 7 0
基 于 速 度 密 度特 性 的元 胞 自动 机 城 市 交 通 流模 型
元胞自动机交通流模型

二、NS 模型
在第184号规则的基础上,1992年,德国学者 Nagel和Schreckenberg提出了一维交通流CA模型, 即,NS 模型(或NaSch模型) Nagel and Schreckenberg. A Cellular automaton model for freeway traffie.Journal of Physics(France),1992 CA模型最基本的组成包括四个部分:元胞(cell )、 元胞空间(lattice)、邻域(neighbor)及更新规则 (rule)。
d) 延迟加速 4)位置更新:车辆前进
例:设
vmax 2
a)加速过程
b)安全刹车过程
c)随机慢化过程
(以随机慢化概率p)
d)位置更新
在NS 模型的基础上,又陆续地提出了一系列一维 CA交通模型,如TT、BJH、VDR、FI等模型; 双车道CA交通模型:STNS模型 机非混合CA模型: CCA模型 城市路网CA二维模型: BML、CTM模型
场科学变革。
Free online access: /
90号规则:分形结构 ——CA_rule_90.m
110号规则:复杂结构 ——CA_rule_110.m
§2 元胞自动机交通流模型
一、第184号规则 特别注意:第184号规则
100 90 80
初始 随机
×7.5m
随机慢化概率p=0.2;密度ρ=27veh/km/lan(0.2);
初始 均匀 分布
×7.5m
随机慢化概率p=0.2;密度ρ=33veh/km/lan(0.25);
×7.5m
交通流CA模型的主要优点:
城市交通系统动力学特性研究_带信号灯控制的一维元胞自动机模型研究
第16卷 增刊3 广西工学院学报 V ol.16 Sup3 2005年10月 JO U RN A L OF GU AN G XI U N IV ERSIT Y OF T ECHNO L OG Y Oct.2005文章编号:1004-6410(2005)S3-0021-03城市交通系统动力学特性研究——带信号灯控制的一维元胞自动机模型研究交通运输 012班 2001021234 赵路敏指导教师:向 宇摘 要:元胞自动机的交通流模型以简单的规则反映交通过程中实际存在的各种复杂因素,并能在计算机上方便实现,从而可以演示这些因素对城市交通系统动态特性的影响。
本文系统阐述了元胞自动机在交通流上的应用,以元胞自动机理论为基础,把车辆在路段上运动的变化规律表述为元胞自动机的演化规则,建立了基于元胞自动机理论的交通流模拟的N S模型,并利用M at lab语言实现了带信号灯控制的一维元胞自动机模型的仿真。
关 键 词:交通流;元胞自动机;计算机仿真Abstract:T he Cellular Autom ata traffic stream mo del can reflect var io us com plicated factor s existing in traffic process w ith a simple rule,and also can be realized w ith com puter,thus it can illustrate the effect of facto rs o n the urban tr affic behavior conveniently.T his paper sy stematically intr oduces the application of the models and the theories of the cellular autom ata theory for the traffic stream mo dels,and describes the mo ving character o f vehicles as changing rules of cellular auto mata.One simulating prog ram w ith lang uag e is w ritten,it is m ainly used to apply to the research of one lane Cellular Autom ata controlled by traffic light.Key words:tr affic stream;cellular automata;co mputer simulation引言近20年来,世界各国虽然基本建成了现代化道路网,但随着经济的发展,路网通行能力已经满足不了交通量增长的需要,交通拥挤、道路阻塞和交通事故频繁发生正在越来越严重地困扰着我国的大、中城市。
用于模拟单车道交通流的改进NS元胞自动机模型
(n it o m g n r h s i unU im ̄ hnd i un 104 h a I t efIa e dGa i,S ha n e i,C e uS ha 06 ,Ci ) st u a pc c v g c 6 n
A s at bt c:We m rvdteN gl crce br N )cl lr u ma nm dlo n — n a i f w .A cl l f r poe ae— hekn eg( S e ua t t oe f oel et fc o s e ua o i h S l ao o r a r l r
关 键词 : 交通 流 ; 元胞 自动机 ; S模型 N 中图分 类 号 : P 9 . 文 献标识 码 : T 3 19 A
(tibc @ 13 cr) s n ek 6 . o e n 要 : 究改进 了基 于元胞 自动 机 的 一 维 N 研 S交通 模 型 , 化 了元胞 长度 和 时 间步 长 , 细 对静 止
NS mo e s d vd d it w .s i h me se .On t e oh rh n .t a h c ee ain a i t faso k—s l c rw s d l wa i ie n ot o od d t e t tp i h te a d h t e a c l r t b l y o tc t o i t a a i w a e h n t a o h u n n n a c n i e e . F r e moe te e ain h p b t e n a d miai n d c l rt n e k r ta h t f te r n i g o e w s o sd r d u t r r . h rl t s i ew e r o z t e e e ai h o n o o p o a i t n h rf c d n i a a e n o a c u t B o u e i lt n . s me b sc q ai t e r s t a d t r b bl y a d t e t f e st W t k n i t c o n . y c mp tr s i ai y s mu ai s o a i u lt i e u s n o av l f n a n a ig a o h r p s d mo e e e o ti e . C mp r d w t te d e s t e f n a na ig a o h u d me tld a rm f te p o o e d l w r b an d o ae i oh r mo l, h u d me t d a r m f te h l
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
? 教学目的:了解初等 元胞自动机的基本概念, 掌 握元胞自动机交通流模型的建立 方法,掌握 NS交 通流模型 的特点、适用条件及其仿真。
used to describe the natural
world. My purpose in this book is
to initiate another such
transformation, and to introduce
a new kind of science that is
based on the much more general
生了变革。在此书中我的目
的是应用简单的计算机程序
来表达更为一般的规律,并
在此种规律的基础上建立一
种新的科学,从而启动另一
场科学变革。
Free online access:
90号规则:分形结构 ——CA_rule_90.m
110号规则:复杂结构 ——CA_rule_110.m
§2 元胞自动机交通流模型
第六章 元胞自动机 交通流模型
? 本章主要内容
§1 元胞自动机理论 §2 元胞自动机交通流模型
详见: 贾斌,高自友,基于元胞自动 机的交通系统建模与模拟,科 学出版社, 2007-10
相关文献:
? Nagel and Schreckenberg. A Cellular automaton model for freeway traffie .Journal of Physics(France) ,1992
types of rules that can be
embodied in simple computer
programs.
Free online access:
详见: 《A New Kind of Science》
?
三个世纪以前,人们发现建
立在数学方程基础上的规律
能够用于对自然界的描述,
伴随着这种新观念,科学发
? 一、第184号规则
? 特别注意:第184号规则
100
90
80
70
60
50
40
30
20
10
0
0
10
20
30
40
50
60
70
80
90
100
特别注意:第 184号规则 车辆行驶规则为:黑色元胞表示被一辆车占据, 白色表示无车,若前方格子有车,则停止。若前 方为空,则前进一格。
1992年,德国学者Nagel和Schreckenberg在第184号规则的基础 上提出了一维交通流CA模型,即,NS 模型(或NaSch模型)
二、NS 模型
? 在第184号规则的基础上, 1992年,德国学者 Nagel和Schreckenberg 提出了一维交通流 CA模型, 即,NS 模型(或NaSch 模型)
? Nagel and Schreckenberg. A Cellular automaton model for freeway traffie .Journal of Physics(France) ,1992
{0,1}。此时,邻居集N的个数2·r=2,局部映射f:S3→S可 记为:
St?1 i
?
f
(
St i ?1
,
SiSt ,
) t
i?1
大家有疑问的,可以询问和交流
可以互相讨论下,但要小声点
S. Wolfram 的初等元胞自动机
由于只有 0、1两种状态, 所以函数 f共有28=256种状态。
256种初等CA规则
? 郑英力等.交通流元胞自动机模型综述.公路交通科 技.2006,23(1): 110~115
? 孙跃等.基于元胞自动机原理的微观交通仿真模型.重庆 大学学报(自然科学版).2005
? 熊桂林, 黄悦.元胞自动机在混合交通仿真中的应用.系 统工程.2006
? 狄宣.基于元胞自动机的快速路仿真建模与交通流优化分 析.同济大学硕士学位论文.2008.3
对给定初值及规则 f,可通过计算机得到N步以后的演化结果
详见:
? Three centuries ago science was
《A New Kind of Science 》
transformed by the dramatic new
idea that rules based on
mathematical equations could be
St?1 i
?
f
(
St i ?1
,
SiSt ,
) t
i?1
二、初等元胞自动机
? 初等元胞自动机是状态集S只有两个元素{s1,s2},即状态个 数k=2,邻居半径r=1的一维元胞自动机。由于在S中具体采
用什么符号并不重要,它可取 {0,1},{-1,1},{静止,运
动} 等等,重要的是S所含的符号个数,通常我们将其记为
? 重点: NS交通流模型
? 难点: NS交通流模型的 仿真
§1 元胞自动机理论
? 一、什么是元胞自动机
? 元胞自动机(Cellular Automata ,CA)是一种时空离散 的局部动力学模型,是研究复杂系统的一种典型方法,特 别适合用于空间复杂系统的时空动态模拟研究。
? 元胞自动机不是由严格定义的物理方程或函数确定,而是 用一系列模型构造的规则构成。凡是满足这些规则的模型 都可以算作是元胞自动机模型。因此,元胞自动机是一类 模型的总称,或者说是一个方法框架。
? 在CA模型中,散布在规则格网 (Lattice Grid )中 的每一元胞 (Cell)取有限的离散状态,遵循同样的 作用规则,依据确定的局部规则作同步更新。大 量元胞通过简单的相互作用而构成动态系统的演 化。
? CA模型的特点:时间、空间、状态都离散,每个 变量只取有限多个状态,且其状态改变的规则在 时间和空间上都是局部的。
二、初等元胞自动机
? 初等元胞自动机是状态集S只有两个元素{s1,s2},即状态个 数k=2,邻居半径r=1的一维元胞自动机。由于在S中具体采
用什么符号并不重要,它可取 {0,1},{-1,1},{静止,运
动} 等等,重要的是S所含的符号个数,通常我们将其记为
{0,1}。此时,邻居集N的个数2·r=2,局部映射f:S3→S可 记为: