DV-HOP定位算法
区间范围内修正跳数值的Dv-hop定位算法
的算 法 。根 据 Dvh p 算 法 定 位 过 程 ,在 平 均 每 跳 距 离 估 算 、未 知 节 点 到各 参 考节 点 之 间 距 离 的计 算 等 两 方 面 进 .o
行 了 改进 , 分 析 和 仿 真 了不 同通 信 半径 与锚 节 点 比率 情 况 下 的 定 位性 能 。 结 果 表 明 ,提 出 的 改进 措 施 可 极 大地
R e so o ih n e t i vii n H psW t i a C r a n Spa eR a eDv- o c l to l o ihm c ng H p Lo a i i nA g rt za
H F n —o g ME in — n U e gS n , NG X agQi
21 0 1年 第 2 0卷
3 朗
汁 算 机 系 统 / 用 、
区间范围内修正跳数值 的 D .o vh p定位算法
胡 峰 松 , 孟湘 琴
( 南大 学 计 算 机 上 通 信 学 院 , K沙 4 0 8 ) 湖 j 10 2
摘
要 :针 对 D .o 算 法 在 估 算 跳 数 时引 进 较 大 误 差 的 问题 ,提 出 了 一 种 基 于 区 间 范 围 内修 正跳 数( HWS ) vh p 一 R R
K e w o ds e s rn t o k Dv h p; o elc lz to ; sto ig a c r c ; e iinho t n ac ran s a er n e y r :s n o ew r ; — o n d aia in po i nn c u a y r v so pswi o i hi et i p c a g
( ol e f o ue dC mmu i t n H nnUnvri , hn sa 0 2 C ia C l g mp tr n o e oC a nc i , u a iesy C agh 1 8 , hn ) ao t 4 0
DV-Hop定位算法优化思想
DV-Hop 定位算法改进1.DV-Hop 算法原理及性能1.1.算法原理i. DV-Hop 算法是典型的无需测距的定位算法, 基本思想是将未知节点到信标节点之间的距离用网络中节点的平均每跳距离和两节点之间跳数的乘积来表示, 然后再使用三边测量法或极大似然估计法来获得未知节点的位置信息。
DV-Hop 算法定位过程分以下三个步骤:ii. 信标节点位置已知, 计算未知节点与每个信标节点的最小跳数计算未知节点与每个信标节点的最小跳数, 计算公式如下i j i iji j HopSize h ≠≠=∑iii. 利用三边测量法计算自身位置1.2.算法性能DV-Hop 算法依据信标节点间的跳数来计算平均距离, 所以信标节点比例对算法定位精度存在直接的影响。
一方面, 信标节点的位置信息通常依赖于人工部署或者GPS 实现。
人工部署受限于环境同时也限制了网络的可扩展性;而使用GPS 会使得节点费用比普通节点高两个数量级, 成本太高。
另一方面, 无须测距定位算法中, 信标节点比例越高, 定位越精确。
所以信标节点比例和成本需要权衡。
同时, DV-Hop 算法对网络的拓扑结构也十分敏感。
在实际网络拓扑中, 未知节点与信标节点间的路径往往不是直线, 而是存在“空洞”, 使得估算距离远大于实际距离, 定位精度大打折扣, 即DV-Hop 算法仅在各向同性的密集网络中, 校正值才能被合理的估算。
所以DV-Hop 算法的性能在一定程度上取决于网络结构和信标节点比例。
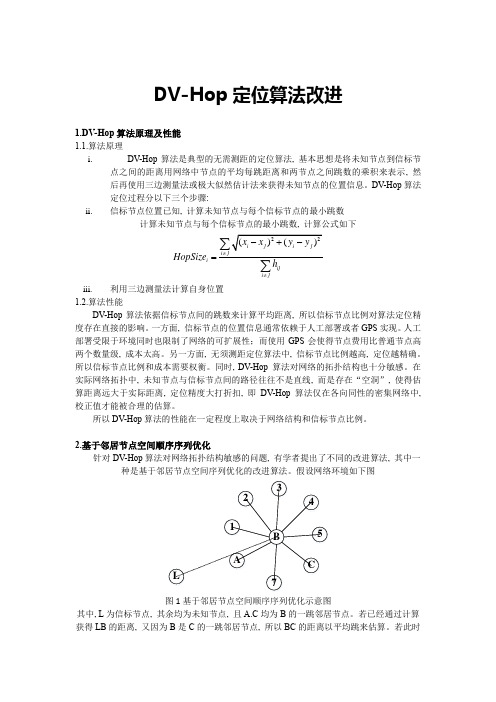
2.基于邻居节点空间顺序序列优化针对DV-Hop 算法对网络拓扑结构敏感的问题, 有学者提出了不同的改进算法, 其中一种是基于邻居节点空间序列优化的改进算法。
假设网络环境如下图AB CL 123457图1基于邻居节点空间顺序序列优化示意图其中, L 为信标节点, 其余均为未知节点, 且A.C 均为B 的一跳邻居节点。
若已经通过计算获得LB 的距离, 又因为B 是C 的一跳邻居节点, 所以BC 的距离以平均跳来估算。
基于DV-Hop的无线传感器网络定位算法
T i ag rtm d sa b o d a to e n w a c o r m e o d r u d t e o  ̄ s te P I o n n w o e c o d n o t e h s l o h a d r a c s ft e n h r f i h o s c n o n ,h n c n r h R fu k o n n d s a c r ig t h m n mb ro errc i e r a c ss f m n h r , n h o e h o ewi h ih s P n o ae t y DV —Ho a d te u e ft i e ev d b o d a t r a c o s a d c o s st e n d t t e h g e t RIa d l c t si b h o h p, n h n
u d t si t e a c o , d i ep st n n r c s sn eg td la ts u r smeh d t e u et e c mu aie e rr C o — p a e an w n h r a n t o i o i gp o e su ig w ih e s q ae to or d c h u l t ro . h o to n h i e v
0 引言
节点升级为锚节点 的 D V—H p定 位算 法 , o 并给 出 了仿真实 验 的结果及其分析 。
1 DV— H叩 算法描述 定位技术是无 线传 感器 网络 重要 的共 性支撑技术 之一。 无线传感器网络节 点通 常采 用随机布撒方式 , 无法事 先知道 自 身位置 , 此 传感 器 节 点 必 须 能 够 在 布 撒 后 实 时 进 行 自定 因 位 。无线传感器 网络 中的节点 定位 就是指 依靠 有 限个位 置已知的节点( 也称为锚节点) 按 照某种方式确定 网络 中其他 ,
一种改进的DV-Hop节点定位算法

∑ i
H o z Ne pSie w ̄ —
J ≠
—
每个信标节点采用广播的方式将其位置信息 ( i x,y os) I , i i pi D ,H 传递给其他节点 , 中,H pi 其 os 是跳数 ,它的初始时为0 ,当接收节点接 收到来 自同~个信标节点但跳数不 同的位置信息时 , 记录最小的跳数 , 忽略较大跳数的分组。然后将跳数加 1 ,再转发给其他邻居节点 。依靠 这种方法便能够找 出未知节点到每个信标节点 的最小跳数。
进
AX =b
其中,矩阵 信标节点坐标构成 , o未知节点和信标节点之间的 由 b a 距 离构成 , 为未知节点的坐标,用标准最小二乘法可求得 估计值 的
U =r 一 Ar ) b
2 改进算 法 在改进算法 中,为降低存储容量 ,对每个信标节点的广播范围进行 限制 。此外 ,目 前的无线传感器网络 的节点定位算法大部分是设定节点 , ) , 分别是信标 节点 的坐标 ,H s x Y 、 乃) . 1 , p 为信标 节点 oj j 之 问的跳数。然后 ,信标节点将计算出的平均每跳距离广播到网络 与i 中,未知节点仅记录它接收到的第一个平均距离。然后 , 未知节点将它 与信标 节点的最小跳数和接收到的每跳平均距离相乘便计算 出了它与每 个信标节点的估计距离。
11测量未知节点与信标节点间的最小跳数 .
其中d 表示通信的距离,E 为消耗 的能量 , z 足关系2 n ,k ,菏 } < <4 是 系数 。此外 ,为了节省通信能量 ,可以设置一个 门限跳数 n,当节点接 收到来 自信标节点 的位置信息时 ,首先 检测Hos 否达 到门限跳数 , pi 是 若 H p < ,则跳数加1 os n ,并转发给邻居节点,否则丢弃该包 。 S p :在计算每个信标节点与其他信标节点 的每跳平均距离时,公 t2 e 式变为
无线传感器网络DV-Hop定位算法的研究的开题报告

无线传感器网络DV-Hop定位算法的研究的开题报告I.课题背景与意义随着无线网络技术的发展,无线传感器网络已成为研究热点之一。
无线传感器网络的一项重要应用就是对目标位置进行定位,但是受到无线信号传播的不稳定性、传感器节点位置误差和网络拓扑结构的限制等因素的影响,节点定位精度难以保证。
因此,设计一种高精度的节点定位算法成为无线传感器网络中的研究热点。
传感器网络中的DV-Hop算法是一种经典的定位算法,其原理简单,适用于多种拓扑结构,并且具有较好的定位精度。
因此,本文研究无线传感器网络中DV-Hop定位算法,进一步提高节点定位精度,适应网络中不同的应用场景。
II.研究现状及发展动态近年来,越来越多的研究关注无线传感器网络的节点定位问题。
目前,相关研究主要集中在DV-Hop算法、MDS-MAP算法、半监督学习算法等方面。
其中,DV-Hop算法因其原理简单、易于实现,在无线传感器网络中得到了广泛的应用。
但随着网络规模的增大,节点间距离的误差也会随之增大,影响定位的精度。
因此,如何减少节点定位误差是当前研究的重点。
III.研究对象与内容本文研究对象为无线传感器网络中的DV-Hop节点定位算法。
具体研究内容包括以下三个方面:1.分析DV-Hop算法的原理和定位误差来源,探究其局限性。
2.通过增加节点之间的通信次数,设计一种改进的DV-Hop算法,来提高节点定位精度。
3.在NS2平台上实现算法,并对其进行性能测试,评估改进后算法的可行性和有效性。
IV.研究方法和技术路线本文将采用理论分析与仿真实验相结合的方法,进行研究。
主要包括以下技术路线:1.对DV-Hop算法进行分析,研究其误差来源,并探究提高算法精度的途径。
2.设计改进的DV-Hop算法,并进行相关的数学建模和理论分析。
3.在NS2模拟平台上实现算法,并进行性能测试。
4.对实验结果进行分析和总结,评估改进后算法的可行性和有效性。
V.预期研究成果本文预期研究成果包括以下方面:1.研究了无线传感器网络中DV-Hop节点定位算法的原理,探究其定位误差来源和局限性。
改进的无线传感器网络DV-Hop定位算法
需测距定位方案受到广泛关注 。D H p算法是 目前应用最 V— o 广泛的定位 算法之一 ,但是它在计算未知节点到锚 节点距离 时存在 较大误差 。本文针对 DV H p算法 的不足 ,提出一种 —o 改进算法。
,
I pr ve DV- o c lz to g rt m o d H p Lo a i a i n Al o ihm f rW i ee sS ns rNe wo k o r ls e o t r
W A N G ng ,S IH ao ya Yi H — ng
(. c o l f n i n na dChmi l n ier g S e yn io gUnv ri , hn a gI0 5 , hn ; 1 S h o E vr me tln e c gn ei , h n agLg n iesy S ey n 1 1 9 C ia o o a aE n t 2 P A6 0 1 ro sS e yn 1 12 C ma . L 5 2 o p, h n ag10 6 , h ) T
[ ywod Wi ls e sr t r( N)lcl ai loi m;o eae ae aea e o n c vt; - o loi m Ke r s r esSn o wokWS ;oai t na rh cv rg t;v rg n et i DV H pag rh I e Ne z o g t r c iy t
dsac,adc mp tstea getru teajcn o e vra. tit dc sa eaecn et i erec mp t h pds n et r i n e n o ue n l ho 曲 h dae t d so elp I nr ue v rg on ci t dge o ue o iac omoe t h n o vy t
无线传感器网络DV-Hop定位算法的研究
Ab t a t B c u e t e s a ef c o f n h rn d si l s l ea e o b t o el c l a i n a c r c n o e a e r t s r c e a s h c l a t ro c o o e Sco e y r lt d t o h n d ai t c u a y a d c v r g a e a o z o
p s d i h a e h o g n lzn h o e n t e p p lc t n a g rt m o mp o ig t e l c t n a c r c n o e a e r t . Ho o a i l o ih f r i r v n h o a i c u a y a d c v r g ae o o
总第 2 5 4 期 21 年第 3 00 期
计算机 与数字工程
C mp tr& D gtl n ier g o ue ii gn e i aE n
Vo . 8 No 3 13 .
34
无线 传 感 器 网络 D — p定位 算 法 的研 究 V Ho
白凤 娥 姜晓荣 牟 汇慧
( l g f mp t rEn iern n o t r ,Tay a ie st f c n lg ,Tay a 0 0 2 ) Col eo e Co u e gn eiga dS f wa e iu n Unv r i o y Te h oo y iu n 3 0 4
Un n wnn d so l eev no maino n h rn d swi i td h p n i k o o e nyrc ieifr t fa c o o e t l e o s i DV- p lc l ain ag rtm. W h n au — o h mi Ho o ai t lo ih z o e n k o o er c ie r h n 3a c o o e ,t eu k o o ei lc td a d c n etd t n h rn d . Th n。t eod n wnn d e ev smo et a n h rn d s h n n wn n d S o ae n o v re O a c o o e e h l a d ten w n h rn d sa eiv le nt elc t n o h e tu k o o e. F n l n h e a c o o e r n ov d i h o a i ft er s n n wn n d s ial h i lto e uts o h t o y。t esmuain rs l h wsta
《DVHOP定位算法》课件

摘要: DVHOP定位算法是一种用于无线传感器网络中节点定位的算法,通过测量节 点之间的距离来确定节点的位置。
算法简介
DVHOP定位算法是基于距离向量的位置估计算法,通过节点之间的距离信息进行三角定位。
算法原理
1 距离测量
节点之间通过无线信号传输进行距离测量,使用多普勒效应或RSSI进行距离估计。
2 三角定位
通过多个节点之间的距离信息,使用三角定位算法计算节点的位置。
3 位置修正
根据估计位置和实际距离进行位置修正,提高定位的准确性。
算法步骤
1
邻居选择
选择节点的邻居节点作为距离测量的基准。
2
距估计
通过测量节点与邻居节点之间的距离进行距离估计。
3
三角定位
利用多个节点之间的距离信息,使用三角定位算法计算节点的位置。
机器人与自动驾驶
将DVHOP定位算法应用于机器人 和自动驾驶技术中,帮助实现精 准定位和导航。
结论
DVHOP定位算法是一种灵活可靠的节点定位算法,广泛应用于无线传感器网 络和定位技术领域。
算法的优缺点
优点
简单易实现、不依赖GPS技术、适用于大规模网 络。
缺点
受环境干扰影响较大、定位误差较大、消耗较 多能量。
技术应用
无线传感器网络
DVHOP定位算法可应用于无线传 感器网络中的节点定位,用于环 境监测、农业检测等应用。
室内定位
通过部署无线传感器节点,利用 DVHOP定位算法实现室内定位服 务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Min-Max算法
这些限制框的交集通过下式计算。当未知节点 3 可利用的锚节点多于3个时,将其转化为 Cn 组分别计 算并取其平均值。
主要内容
1 引言
2 定位技术分类 3 DV-HOP定位算法 4 性能指标
DV-HOP算法
DV-HOP定位算法具有方法简单, 定位精度较高的特点,它是利用距离 矢量路由和GPS定位的思想提出的一系 列分布式定位方法之一。
平均每跳距离
归一化处理得到权值
i
hi
h
k 1
M
Hs D i HsiD
i 1
M
k
通过这个加权过程,使得定位节点的平均每跳距离能 从多个信标节点的平均每跳距离中得到反映,使得定位节 点的平均每跳距离更接近于网络的实际平均每跳距离。
DV-HOP算法的3个阶段-最小均方误差准则
(1)
(2)
对(2)式在估计坐 标(x0,y0)处进行泰 勒展开,并忽略高阶 偏导数的影响,得到
(3)
DV-HOP算法的改进2-估计坐标的迭代求精
将(3)代入(1)中,求解方程组,可得到坐标修正 步长h,k。设定判断条件:
(4)
若上式成立,则停止计算,否则取步长为
,即
代入式(3)重新计算,直到满足式(4)的精度门 限要求,最后迭代结果即为所求节点坐标
DV-HOP算法的3个阶段
( xi , yi ), ( x j , y j ) :为锚节点i与锚节点j的坐标
dij hj
:为锚节点i与锚节点j之间的实际距离 :为锚节点i到锚节点j之间的跳数
HsiD HsiN :以锚节点i为基准,计算出的平均每跳距离
M :锚节点总个数
i
:锚节点i的平均每跳距离的权值
Min-max算法
Min-Max算法的基本思想是依据未知节点到各锚 节点的距离测量值及其坐标构造若干个限制框 (bounding-box),即以锚节点为圆心,未知节点到 该锚节点的距离测量值为半径所构成圆的外接正方 形,正方行交叉区域的几何中心即为未知节点的估 计坐标。如下图所示,说明了有3个锚节点估计距离 时的工作原理,锚节点A(xi,yi)的限制框的4个顶点 的计算如下式所示: 为未知节点M到锚节点A的测量距离。
性能指标
(4) 定位能耗 因此我们在可以容忍的定位精度范围内,尽量的 减少电源能量损耗,需要减少电源能量在通信、计算 和存储方面的消耗。 (5) 覆盖率 我们将无线传感器网络中可实现定位的未知节 点与网络一开始投放的总的未知节点数的比值定义 为定位算法的覆盖率。我们研究自定位算法和系统 的目地是最大程度地实现未知节点的精确定位。
无需测距技术的定 位
基于测距的定位算法
基于信号传播时间的定位(TOA)
基于测距 的算法
基于信号传播时间差定位(TDOA)
基于接收信号强度的定位(RSSI) 基于接收信号角度的定位 (AOA)
无需测距的定位算法
质心定位算法
DV-HOP定位算法
无需测距
APIT Amorphous 算法
集中式计算&分布式计算
定义平均定位误差eerror为所有未知节点的估计值与实 际值的差值的平均值:
定义归一化平均定位误差为平均定位误差error与通信 半径R的比值:
性能指标
(2) 节点密度 一般来说,网络中节点密度越大,定位精度越高。 DV-Hop算法只能在节点分布比较密集的无线传感器网 络中才能合理地估算平均每跳距离,然后才能较准确 地估算出节点的位置。 (3) 锚节点密度 因为人工部署锚节点的方式受到网络所处自然环境 的限制;而搭载GPS模块的锚节点成本会比普通节点高 两个数量级。这些都限制了锚节点在整个网络中所占的 比例不能太大。
DV-HOP算法的3个阶段
第3阶段:当未知节点获得与3个或更多参考节点的
距离时,根据三边测量法或极大似然估计法来计算未 知节点的位置。
DV-HOP算法的改进1-跳数修正
分析:在通信范围内无论其相距多远,都将其跳数估计
为一跳,而每跳的距离不同,用跳数乘以平均跳距来计算 锚节点与未知节点的距离,必然偏离实际距离,造成节点 定位出现较大的误差。如图2中的锚节点L1与锚节点L2之 问的最短路径,其中每跳的长度都不同,只有最后一跳的 长度接近于实际值,即节点的通信半径。
根据在定位过程中是否把信息传送到某个后台中心或 服务器进行节点坐标的计算 把所需信息传送到某个 中心节点(例如,一台 服务器),并在那里进 行节点定位计算的方式 指依赖节点间的信息 交换和协调,由节点 自行计算的定位方式。
集中式计算
分布式计算
定位的基本方法
三边测量法 三角测量法 极大似然估计法 Min-max算法
DV-HOP算法的改进1-跳数修正
定义1:两锚节点i与j之间的实际距离与所有节点的
通信半径R之比定义为理想跳数,用Hij表示,即:Hij =dij/R。
定义2:节点间实际跳数与理想跳数的相对误差定义
为偏离因子,用 ij 表示,即: ij (hopsij H ij ) / hopsij
三角测量法
已知A、B、C三个节点的坐标,节点D相 对于节点A、B、C的角度,确定节点D的 坐标; 转换为三边测量法。
极大似然估计法
已知1、2、3等n个节点的坐标,及它们到未 知节点D到距离,确定节点D的坐标; 最小均方差估计算法。
极大似然估计法
使用标准的最小二乘法可以得到未知节点的坐标为
定义3:假设锚节点i与j之间的实际跳数为 hopsij ,偏
离因子为 ij , 定义跳数修正系数为
n wijLeabharlann 1 ij其中n取正整数,仿真结果表明,n为2时,定位效果 最佳。
DV-HOP算法的改进1-跳数修正
锚节点间的跳数:
未知节点计算距其最近锚节点的跳数
未知节点计算距其他锚节点的跳数
i j ij
w
n
/(n 1)
DV-HOP算法的改进1-跳数修正
未知节点计算距其他锚节点的跳数
在实际网络中大多数未知节点到任两锚节点的 路径会有部分重叠,因此用两锚节点间的偏离因子 更能体现未知节点距离其它锚节点跳数偏离程度。
DV-HOP算法的改进2-估计坐标的迭代求精
未知节点到各个参考节点的初步估计距离为d1d2……
画圆法
用三边测量法和极大似然估计法来计算待定位节点的坐
标需要三个或三个以上的锚节点位置信息。当未知节点通信 范围内的锚节点数为2或者通信范围内的任三个锚节点共线 时,可采用画圆法进行定位。 未知节点与两个锚节点在一个平面上,分别以锚节点为 圆心,以它们到未知节点的距离为半径画圆。如果交与一点, 则为所求点坐标;若交与两点,则取两交点的中点为所求点 坐标。
谢谢!
需要测量相邻节点间的 绝对距离或方位,并利 用节点间的实际距离来 计算未知节点的位置。
无需测距的定位
无需这些测量信息,而 是根据网络连通性等信 息,利用节点间的估计 距离计算节点位置。
特点比较
基于测距的定位
定位精度相对较高, 但对额外的硬件设施 要求也比较高 成本低、功耗小、 抗测量噪声能力强、 硬件设备简单
主要内容
1 引言
2 定位技术分类 3 DV-HOP定位算法 4 性能指标
定位技术的分类
根据定位过程中是否需要测量实际 节点间的距离,定位算法可分为基于测 距(Range-Based)的定位算法和无需测距 (Range-Free)的定位算法。
Range-Based & Range-Free
基于测距的定位
无线传感器网络的定位技术
主要内容
1 引言
2 定位技术分类 3 DV-HOP定位算法 4 性能指标
引言
无线传感器网络: 指一种在监测区域内随机部署的传感器节 点通过无线通信方式形成的多跳、自组织的分 布式网络。 定位技术的研究意义: 节点的感知数据必须与位置相结合,离开 位置信息,感知数据是没有意义的,如环境监 测、医疗、森林火灾监控等。
二维或者三维空间都可以使用画圆法,这样可以减少不 可定位的节点以及定位误差。
主要内容
1 引言
2 定位技术分类 3 DV-HOP定位算法 4 性能指标
性能指标
(1)定位精度 一般用误差值与节点无线通信半径的比值 来表示传感器节点的定位精度。定位精度只要 不大于 40%,就能够满足绝大多数应用的要求。
DV-HOP算法的改进1-跳数修正
未知节点计算距其最近锚节点的跳数
为距离未知节点最近的锚节点i与其它锚节 点偏离因子的平均值,该平均值充分利用了各个锚节点的跳 数信息,更能反映节点在整个网络的特性。由于未知节点p 距离锚节点i最近,所以它与锚节点i的网络特性更接近,因 此用锚节点i的平均偏离因子近似代替未知节点p与锚节点i之 间的跳数偏离因子,造成的跳数误差更小。
引言
当前对节点定位问题的研究一般都基于以下前提:
(1) 网络中有一定比例的节点位置己知或具有GPS定 位功能,这些位置已知的节点可作为定位参考点。 因为GPS模块价格昂贵、能量消耗大,而且受工作环 境的限制,所以网络中少数节点通过GPS定位。
(2)节点具有与邻近节点通信的能力。
(3)节点不具有自主移动能力。
指依赖节点间的信息 交换和协调,由节点 自行计算的定位方式。
DV-HOP算法的3个阶段
第1阶段:网络中的各参考节点通过典型的距离
矢量交换协议向邻居节点广播自身位置信息分组, 使得网络中的所有节点获得距参考节点的最小跳 数信息。 左图是一个由9个节点 组成的小型传感器网络。 L1 L2 L3 为三个参考节点 剩余的都为未知节点,对节 点A定位