基于MVEKF的测向交叉定位跟踪算法
基于最小二乘方法的单机测向定位算法

基于最小二乘方法的单机测向定位算法何青益;赵地【摘要】针对传统单机测向定位算法定位精度低的问题,提出了一种基于最小二乘方法的单机测向定位算法,讨论了单机测向交叉定位中的若干问题,包括测向定位原理和单机测向交叉定位的情况.首先介绍了两站直接测向交叉定位的原理,然后推导了基于最小二乘方法的测向交叉定位算法,并通过计算机仿真验证了定位性能,与直接测向交叉定位算法相比,基于最小二乘方法的测向交叉定位算法提高了定位精度和算法稳定性,具有很大的实用性.【期刊名称】《舰船电子对抗》【年(卷),期】2013(036)001【总页数】4页(P37-39,61)【关键词】测向定位;交叉定位;最小二乘【作者】何青益;赵地【作者单位】中国电子科技集团公司54所,石家庄050081【正文语种】中文【中图分类】TN9110 引言测向定位是利用对同一目标的示向线进行交叉定位来确定目标的位置。
机载测向定位分为多机测向交叉定位和单机测向交叉定位,其中单机测向交叉定位由于具有设备简单和系统相对独立等优点,得到了广泛研究。
利用单机在不同时刻测量的多条示向线直接交叉定位算法简单,但是定位结果不是最优[1];基于扩展卡尔曼滤波(EKF)及其推广的定位算法在滤波初始值估计不准或者测量值有突变时容易发散,性能不稳定[2];本文引入的基于最小二乘方法的测向交叉定位算法,结合了直接交叉定位算法和非线性最小二乘算法,直接交叉定位获取目标的估计初值,通过最小二乘方法迭代得到更高精度的定位结果。
基于最小二乘方法的测向交叉定位算法定位精度高,对测向数据进行预处理,可以实时更新目标的位置信息,是一种稳定性好、定位精度高的定位算法。
1 测向交叉定位原理两站交叉定位是一种基本的交叉定位方式。
如图1所示,两测向站的大地经纬度坐标分别为A1(x1,y1)、A2(x2,y2),辐射源到两测向站 A1、A2的来波方位角分别为θ1、θ2,则辐射源所处的地理位置即是2条示向线的交叉点B,设其坐标记为(xm,ym)。
基于EKF和数据融合的移动台跟踪定位算法
基于EKF和数据融合的移动台跟踪定位算法赵峰;赵清华;陈宏滨【期刊名称】《计算机工程》【年(卷),期】2012(038)022【摘要】An improved tracking and localization algorithm for mobile stations based on Extended Kalman Filtering(EKF) is proposed. In this algorithm, EKF is used to obtain multiple tracking trajectories of a mobile station with its initial position estimation being obtained. Combining the technique of removing the trajectories with larger deviations and data fusion with weighted averaging, a better trajectory among the trajectories is found. Based on this, a distance threshold is coordinated with the matching management of the better trajectory's points for smoothing the better trajectory to obtain a best tracking trajectory. Simulation results show that the algorithm has low computational complexity, strong robustness as well as higher localization accuracy compared with traditional EKF tracking and localization algorithms.%提出一种利用扩展卡尔曼滤波(EKF)算法实现移动台跟踪定位的改进算法.该算法在已获得移动台初始位置估计的基础上,利用EKF对移动台的运动轨迹进行多次估计,获取多条跟踪轨迹,剔除偏差较大的轨迹并进行加权平均的数据融合处理,获取一条较优轨迹.再结合距离门限值对较优轨迹的点迹进行匹配管理,实现对较优轨迹的平滑处理,获得最优跟踪轨迹.仿真结果表明,该算法计算复杂度低、鲁棒性强,定位精度明显高于传统EKF跟踪定位算法.【总页数】5页(P244-247,250)【作者】赵峰;赵清华;陈宏滨【作者单位】桂林电子科技大学信息与通信学院,广西桂林541004;桂林电子科技大学信息与通信学院,广西桂林541004;桂林电子科技大学信息与通信学院,广西桂林541004【正文语种】中文【中图分类】TP312【相关文献】1.基于MVEKF算法的单站无源定位与跟踪方法研究 [J], 靳展;刁鸣2.基于MVEKF的测向交叉定位跟踪算法 [J], 赵道建;徐毓;黄伟平3.基于MGEKF的单站无源定位跟踪算法 [J], 陈立万;廖海军4.对基于数据融合的EKF跟踪定位算法的研究 [J], 赵清华5.基于EKF算法的单站无源定位跟踪研究 [J], 韩令军;田增山;孙冬梅因版权原因,仅展示原文概要,查看原文内容请购买。
基于EKF的摄像机-IMU相对姿态标定方法
基于EKF的摄像机-IMU相对姿态标定方法
姜广浩;罗斌;赵强
【期刊名称】《计算机应用与软件》
【年(卷),期】2015(032)007
【摘要】摄像机与惯性传感器之间的相对姿态标定是视觉-惯性混合跟踪器的关键技术之一,是混合跟踪器进行数据融合获得鲁棒姿态输出的前提.提出一种新颖的基于扩展卡尔曼滤波器EKF(Extended Kalman Filter)的摄像机-惯性测量单元IMU(Internal Measurement Unit)相对姿态标定方法.该方法通过构建基于刚体运动学的过程模型和基于摄像机外参数的测量模型,估计摄像机与惯性传感器的相对位置和方向.初步实验结果显示,所提出的标定方法不仅能够标定6 DOF相对姿态,标定操作更简易快速,而且在系统初始误差较大和非线性噪声较大的条件下,该方法仍然能够精确地获得摄像机与IMU之间的相对姿态.
【总页数】5页(P155-158,203)
【作者】姜广浩;罗斌;赵强
【作者单位】中国工程物理研究院计算机应用研究所四川绵阳621900;中国工程物理研究院计算机应用研究所四川绵阳621900;中国工程物理研究院计算机应用研究所四川绵阳621900
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种靶标姿态多方位的大视场摄像机标定方法 [J], 余磊;罗佳丽;韩杨杨;涂晓衍
2.基于分布式IMU的相对姿态估计方法 [J], 刘镇波;李四海;王珏;张亚崇
3.基于自由运动一维标定物的多摄像机参数标定方法与实验 [J], 付强;全权;蔡开元
4.基于标定板特征的摄像机线性标定方法研究 [J], 赵群;杨进华
5.基于BP神经网络的姿态测量系统摄像机标定 [J], 蔡盛;李清安;乔彦峰
因版权原因,仅展示原文概要,查看原文内容请购买。
一种新的测向交叉定位算法
一种新的测向交叉定位算法
廖海军
【期刊名称】《电光与控制》
【年(卷),期】2008(015)009
【摘要】为了解决测向交叉定位系统在基线附近定位精度较低的问题,介绍了一种基于最小方差法的测向交叉新算法.该方法对于每个空间点,都以定位误差最小的算法和参数来计算目标位置.首先研究了3种测向交叉定位算法及距离解算误差,然后给出了基于最小方差的新算法流程图,最后对算法进行了仿真和性能分析.仿真结果表明,新算法明显地改善了基线附近的定位精度,提高了系统的抗干扰能力.该算法可适用于某些雷达组网系统的目标指示阶段.
【总页数】3页(P29-31)
【作者】廖海军
【作者单位】电子科技大学电子工程学院,成都,610054
【正文语种】中文
【中图分类】V233.7;TN971
【相关文献】
1.机载无源测向交叉定位系统中消除系统误差的一种算法 [J], 张小义
2.机载无源测向交叉定位系统中消除系统误差的一种算法 [J], 张小义
3.一种三维多站测向交叉定位算法 [J], 刘李楠;赵晓萌
4.地球表面测向交叉定位算法 [J], 赵辰乾;王松波;刘益辰
5.变压器局部放电多目标无源定位中去除测向交叉定位虚假点的快速算法 [J], 罗日成;李卫国;李成榕
因版权原因,仅展示原文概要,查看原文内容请购买。
测向交叉定位原理
测向交叉定位原理
测向交叉定位(Differential Direction-of-Arrival)是一种基于多个接收器对信号进行测向,并通过交叉定位算法确定信号源位置的技术。
它广泛应用于雷达、无线通信等领域中的目标定位问题。
测向交叉定位的基本原理如下:
1. 测向:在信号源周围设置多个接收器,分别对信号进行测向,得到每个接收器接收到的信号方向。
2. 交叉定位:将每个接收器测得的信号方向数据传输至交叉定位处理器,处理器通过计算不同接收器测得的信号方向的角度差值,得出信号源在空间中的位置坐标。
具体来说,假设有三个接收器A、B、C,它们分别测得信号方向为θA、θB、θC,则信号源到三个接收器的距离分别为:
rA=OA·cosθA
rB=OB·cosθB
rC=OC·cosθC
其中,OA、OB、OC分别为接收器A、B、C到信号源的矢量。
通过交叉定位算法,可以解出信号源的坐标(x,y,z)。
常见的交叉定位算法有最小二乘法、加权最小二乘法等。
测向交叉定位的优点是定位精度高、受环境影响小、可靠性强等。
但同时也存在着一些缺点,例如需要大量的接收器设备、受信号源和环境的影响等。
基于分段线性KF的测向交叉定位算法
基于分段线性KF的测向交叉定位算法黄雪梅【摘要】The single station,multi-point bearing cross location is an important embranchment of single observation passive location technology,which is widely used in engineering at present.If direction-finding precision is not satisfied,it must introduce Kalman filter to process azimuth data before locating,which can improve the direction-finding precision.However,if the single station works longer time and the azimuth data is processed by traditional linear Kalman filter,the location precision will degrade because of degeneration of the direction-finding accuracy.A method based on the piecewise linear Kalman Filter is presented.The simulation results demonstrate this method can solve the problem mentioned above and has the remarkable effect on improving the location accuracy and shortening the convergence time.This method issimple,applicable,and can avoid complicated computing Jacobian matrix in extended Kalman filter (EKF) or modified gain EKF (MGEKF) algorithm.%单站多点测向交叉定位是单站无源定位技术中较重要的一个分支,目前工程上应用广泛.当测向精度不高的时候,需要首先对方位角进行卡尔曼滤波,提高方位角估计精度后再进行定位,但是,如果单站定位工作时间较长,采用传统线性卡尔曼滤波方法,方位角精度将逐步恶化,最终导致定位结果变差.针对此问题,给出了一种基于分段线性KF的处理方法.仿真结果表明,基于分段线性KF处理的定位算法可以解决定位工作时间较长,定位结果变差的问题,对提高定位精度和缩短定位收敛时间有较显著效果.这种方法简单适用,可以回避EKF,MGEKF等算法中对雅克比矩阵的复杂计算.【期刊名称】《现代防御技术》【年(卷),期】2017(045)001【总页数】6页(P113-118)【关键词】单站;方位角;测向交叉定位;分段线性卡尔曼滤波;无源定位;扩展卡尔曼滤波【作者】黄雪梅【作者单位】中国西南电子技术研究所,四川成都610036【正文语种】中文【中图分类】TN953;TN713采用被动工作方式的无源定位技术因其作用距离远、隐蔽接收、不易被对方发现等优点深受军方的青睐,并在现代电子战和无线通信系统中都有广泛应用。
测向交叉定位算法
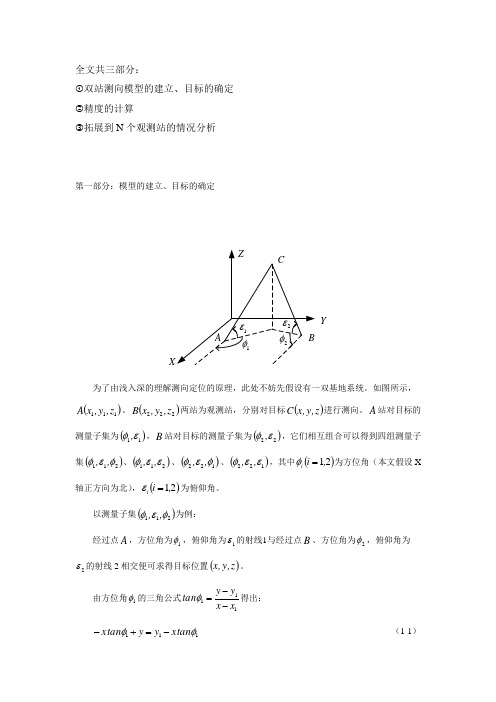
全文共三部分:①双站测向模型的建立、目标的确定 ②精度的计算③拓展到N 个观测站的情况分析第一部分:模型的建立、目标的确定XY为了由浅入深的理解测向定位的原理,此处不妨先假设有一双基地系统。
如图所示,()111z ,y ,x A 、()222z ,y ,x B 两站为观测站,分别对目标()z ,y ,x C 进行测向。
A 站对目标的测量子集为()11εφ,,B 站对目标的测量子集为()22εφ,,它们相互组合可以得到四组测量子集()211φεφ,,、()211εεφ,,、()122φεφ,,、()122εεφ,,,其中()21,i i =φ为方位角(本文假设X 轴正方向为北),()21,i i =ε为俯仰角。
以测量子集()211φεφ,,为例:经过点A ,方位角为1φ,俯仰角为1ε的射线1与经过点B 、方位角为2φ,俯仰角为2ε的射线2相交便可求得目标位置()z ,y ,x 。
由方位角1φ的三角公式111x x y y tan --=φ得出: 111φφtan x y y tan x -=+- (1-1)由俯仰角1ε的三角公式1111φεsin y y z z tan --=得出: 111111φεφεsin z tan y sin z tan y -=- (1-2)由方位角2φ的三角公式222x x y y tan --=φ得出: 222φφtan x y y tan x -=+- (1-3) 由俯仰角2ε的三角公式2222φεsin y y z z tan --=得出: 222222φεφεsin z tan y sin z tan y -=- (1-4) 将方程组(1-1)、(1-2)、(1-3)表示成矩阵形式为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---222111111121101001φφεφφφεφtan x y sin z tan y tan x y z y x tan sin tan tan简化表示为:Z HX =其中()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2221111111211101001φφεφφφεφtan x y sin z tan y tan x y Z z ,y ,x X ,tan sin tan tan H T从而得出辐射源的位置坐标Z H X 1-=同理可知其他三个组合也可以求出辐射源的位置坐标。
基于OpenMV的目标方位追踪算法

基于OpenMV的目标方位追踪算法作者:姚志强赵恩铭杨松杨燕婷刘光宇周豹王辰朱晓栋来源:《牡丹江师范学院学报(自然科学版)》2021年第03期摘要:提出一种基于OpenMV的目标方位追踪算法.算法以机器视觉模块OpenMV为图像输入及处理平台,通过自带的摄像头采集目标图像信息,使用通用加速分割检测算法(AGAST)获取目标的特征点,将采集到的特征点与目标特征进行匹配,达到追踪目标并检测其方位信息的目的.实验结果表明,该算法在目标方位追踪上具有较高的准确率.关键词:目标追踪;AGAST;局部不变特征[中图分类号]TP391.4 [文献标志码]AAbstract:This paper presents an algorithm for target location tracking based on OpenMV.The algorithm takes the machine vision module OpenMV as the image input and processing platform,collects the target image information through the built-in camera,uses the General Accelerated Segmentation Detection Algorithm (AGAST) to obtain the target feature points,matches the collected feature points with the target features,and achieves the purpose of tracking the target and detecting its azimuth information.Experimental results show that the algorithm has high accuracy in target azimuth tracking.Key words:target tracking;AGAST;local invariant features目標追踪是机器视觉中重要的研究方向,在日常生活中有着广泛的应用.[1-2]特征匹配法[3]是目标追踪的主流方法,根据特征点灰度值与其邻近点灰度值差异,进行图像匹配.特征点检测算法主要有Rosten[4]等人提出的FAST(Features from Accelerated Segment Test)算法和Mair[5]等人提出的AGAST(adaptive and generic accelerated segment test)算法.FAST算法的运算量小,实时性高,但在图像发生变换时鲁棒性较差;AGAST算法准确率高、追踪效果好,但计算复杂性略有增加.本文以机器视觉模块OpenMV为图像输入及处理平台,通过自带摄像头采集目标图像信息,使用通用加速分割检测算法(AGAST)获取目标的特征点,将采集到的特征点与目标特征进行匹配,实现目标方位追踪算法,达到追踪目标并检测其方位信息的目的.1 系统总体设计OpenMV是一款基于STM32 H743II ARM Cortex M7处理器和OV5640图像传感器的机器视觉模块,能够使用Python语言实现图像检测、目标追踪、智能寻迹等功能.本文基于OpenMV模块进行目标追踪及方位检测.如图1所示,目标追踪由提取特征点、目标匹配、非极大值抑制、输出目标方位等过程组成.使用AGAST算法采集目标特征点,在进行非极大值抑制后将其作为目标特征保存到OpenMV中,追踪目标时,将采集到的特征点与目标特征进行匹配.当匹配到的特征点个数达到设定的阈值时,即为匹配成功,输出目标在画面中的方位.选用如图7所示的图像,通过对比FAST算法与AGAST算法在角度变换、尺度变换和视角变换的重复率来验证算法的有效性,实验结果如图8所示.从图8中可以看出,与FAST算法相比,本文使用的AGAST特征检测算法在准确匹配到目标的同时,对于各种变换都具有良好的不变性,具有较高的鲁棒性,能够满足目标追踪及方位检测的要求.3.2 目标方位检测性能为验证目标方位识别的准确性,从角度、视角和尺度三个方面进行对比实验,测试方位检测算法在不同变换下输出方位的绝对误差,绝对误差越小,表示算法的稳定性越高.图9为FAST算法与AGAST算法在不同变换下对图7所示图片的绝对误差比较图.可以看出,AGAST算法在各种变化下依然具有良好的鲁棒性,整体上优于FAST算法,尤其在视角变换较大的情况下,依然能够保持较低的绝对误差.因此,基于AGAST算法进行目标方位检测能够取得更好的效果,可有效降低各种变换对目标追踪的影响.4 结束语提出一种基于OpenMV的目标方位追踪算法,解决了基于OpenMV的目标追踪算法没有目标方位信息的问题.采用AGAST算法提取目标特征点,通过改进传统的目标追踪算法从而获取目标所在方位.实验结果表明,基于OpenMV的AGAST算法能够有效追踪目标并能准确识别目标方位,与FAST算法相比,具有重复率高的优势,对旋转变化、尺度变化和视角变化都具有良好的鲁棒性.参考文献[1]王力超,罗建,刘丙友,等.基于机器视觉的智能小车导航系统研究[J].牡丹江师范学院学报:自然科学版,2019(1):29-33.[2]曹萍萍,刘升.Android平台人脸识别方法研究[J].牡丹江师范学院学报:自然科学版,2018(4):27-30.[3]杨晓敏,吴炜,卿粼波,华骅,何小海.图像特征点提取及匹配技术[J].光学精密工程,2009,17(09):2276-2282.[4]Rosten E.Machine learning for very high-speed corner detection[J].ECCV'06,May,2006.[5]Mair E,Hager G D,Burschka D,et al.Adaptive and Generic Corner Detection Based on the Accelerated Segment Test[J].European Conference on Computer Vision-eccv,2010.[6]Rosten E,Drummond T .Fusing points and lines for high performance tracking[C]// Tenth IEEE International Conference on Computer Vision.IEEE,2005.[7]张岩,李建增,李德良,等.快速鲁棒性非线性尺度不变的特征匹配算子[J].西北工业大学学报,2016,34(6):1108-1119.[8]葛林,于鸣,任洪娥.基于快速尺度空间的无人机影像自适应稳像方法[J].电光与控制,2019,26(2):32-37.[9]刘佳,顾爽,张小瑞,等.基于加速分割检测的移动增强现实跟踪注册算法[J].计算机应用研究,2018,35(10):3121-3125.编辑:琳莉。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract: In terms of the bearing information measured by two or more stations measuring the same target source of radiation, DOA cross location can be used locate the target source of radiation by using the optimal state estimation. Aimed at the drawbacks that the expanded Kalman filter (EKF) algorithms are seriously affected by the initial value and noise measured, a new modified covariance expanded Kalman filter (MVEKF) algorithm was applied to the DOA cross location for a fixed two stations, which can improve the precision of its convergence and location accuracy. The simulation results show that the algorithm is of better track performances as compared with that of the EKF. Key words: modified covariance expanded Kalman filter (MVEKF); DOA cross location; track algorithm
3
式中 ql 的选取与目标运动是否接近于描述它的运 动方程有关, 即与运动方程的精确度有关 . 假设系统噪声和观测噪声为互不相关的零均 值高斯白噪声序列, 可得到如下 MVEKF 滤波方程. 状态一步预测
第1期
位置 RMS 误差 / m 1000
赵道建, 等: 基于 MVEKF 的测向交叉定位跟踪算法
T
式中
m
k =
m 1 m 2
k , k
k/k 1 =
h1 h2
k/k 1 k/k 1
+T
.
修正的卡尔曼增益为
+
为 k 时刻状态变量, 状态一
1 T 0 0 步转移矩阵 0 1 0 0 = , 则离散时间状态方程为 0 0 1 T 0 0 0 1 (5) k = k 1 + k 1
k =
k/k 1
+ 1 + 2
2 2
为第 i 个被动式观测站的量测噪声方差. T 3/3 T 2/2 0 0 T 2/2 T 0 0 0 0 T 3/3 T 2/2 0 0 T 2/2 T
, 采样周期 T = 1 s, 则有 1/3 1/2 0 0 1/2 1 0 0 = ql 0 0 1/3 1/2 0 0 1/2 1
则系统噪声方差阵为
MVEKF- X 方向 EKF- X 方向
参 考文 献 :
[1] TORRIEFI D J. Statistical Theory of Passive Location Systems [J]. IEEE Trans. on AES 1984,20(1): 183-198. [2] GARISH M, WEISS A J. Performance Analysis of Bearingonly Target Location Algorithms[J]. IEEE Trans. on AES, 1992,28(2): 817-827. [3] 程咏梅,潘泉,张洪才,等. 基于推广卡尔曼滤波的多站被 动式融合跟踪[J].系统仿真学报, 2003,15 (4): 548-550. [4] 孙仲康,陈辉煌. 定位导航与制导[M]. 北京:国防工业出 版社, 1987:228-249. [5] 孙仲康,周一宁,何黎星. 单多基地有源无源定位技术[M]. 北京: 国防工业出版社, 1996:196-312. [6] 郭福成. 基于运动学原理的单站无源定位跟踪关键技术 研究[D].长沙:国防科技大学, 2002:64-65. [7] 孙仲康, 郭福成, 冯道旺, 等. 单站无源定位跟踪技术 [M]. 北京:国防工业出版社, 2008:196-197.
(9) +
T
状态估计误差协方差阵的 — 步预测 k/k 1 = 卡尔曼增益为 k = k/k 1 k k k k k/k 1 R1 k 0 k + k
1
(10)
M x, y 为观测目标坐标. S2 X2 , Y2 为观测站坐标,
Y M /k =
X
k =
k =
1 2
, k = i = 1, 2 .
0 R2 k
,
i
k =
kk 1
S2 X2 , Y2
1
滤波方程为 k/k 1 + k
m
S1 X1 , Y1 O
k
k/k 1 (12)
图2
测向交叉定位基本原理图
假设目标 M 作匀速直线运动, 采样周期为 T, k 1 为 k 1 时刻系统噪声, 其方差阵为 , k = xk xk yk yk
测向交叉定位技术通常是通过机载或地面单 站的移动, 在不同位置多次测量方位, 利用方位的 交会实现定位;或者通过地面固定多站的测角系 统所测得的指向线交会来实现定位. 具有全方位、 快速、 探测距离较远、 在受到干扰的情况下仍能正 常工作等优点. 因此, 该技术在军用和民用方面都 具有重要的研究和应用价值 1 2 . 目前,在非线性系统的测向交叉定位技术中 常用扩展卡尔曼滤波 (EKF) 算法 3 , 但 EKF 具有依 赖于初始状态估计并受测量噪声影响大等缺点 4 5 , 估计过程中协方差易出现病态, 收敛速度慢, 滤波 定位结果不稳定. 为提高定位效果,本文将一种新的修正协方 差扩展卡尔曼滤波 (MVEKF) 算法引入基于测向交 叉定位技术的固定双站定位系统中,通过实时修 正协方差矩阵, 防止其产生病态, 弥补 EKF 在跟踪 目标时的不足, 达到稳定跟踪的目的. 通过仿真比 较, 验证了 MVEKF 算法比 EKF 具有更快的收敛速 度和更小的定位误差, 跟踪效果更加有效.
(1. 空军雷达学院研究生管理大队, 武汉 430019; 2. 空军雷达学院科研部, 武汉 430019)
摘
要: 测向交叉定位能够根据两个或多个测量站对同一目标辐射源测得的方位信息, 采用最佳状态估
计法确定出目标辐射源的位置. 针对扩展卡尔曼滤波 (EKF) 算法存在受初值、 测量噪声影响大等缺点, 将一种 新的修正协方差的扩展卡尔曼滤波 (MVEKF) 算法应用到固定双站测向交叉定位中, 可以提高收敛速度和定位 精度. 通过与 EKF 的仿真对比, 验证了该算法具有更好的跟踪性能. 关键词: MVEKF 算法 ; 测向交叉定位; 跟踪算法 中图分类号: TN957 文献标志码: A DOI: 10.3969/ j.issn.1673-8691.2010.01.008
速度 RMS 误差 / m 2/s
300 200 100 0 10 20 30
MVEKF- Y 方向 EKF- Y 方向
40 t/s
50
60
70
80
(b) 速度 RMS 误差比较
图3
仿真结果
Track Algorithm of DOA Cross Location Based on MVEKF
ZHAO Dao-jian1,XU Yu2,HUANG Wei-ping1
k
+
+
k
T
k/k 1 +
+
k
k
k
k
+T
k
(14)
k =
i
k + vi k = yi k + vi k = (6)
3
仿真结果分析
假设有 A、 B 2 个位于平面不同位置的红外传
arctan x k
xi k / y k
k + vi k
感器固定跟踪站,同时测量同一平面上单个运动 的目标 (飞机) , 且只测量目标的方位角, 2 个跟踪 站的位置坐标分别为 (10 000, 0) m和 (90 000, 0) m. 设 目 标 作 匀 速 运 动,其 运 动 轨 迹 方 程 为 x t = 30 000 + 300t, y t = 40 000. 每个观测站方位角量测 误差标准差为 R1 k = , R2 k =
位置 RMS 误差 / m
1000 800 600 400 200 0 10 20 30
MVEKF- Y 方向 EKF- Y 方向位
40 t/s
50
60
70
80
速度 RMS 误差 / m 2/s)
(a) 位置 RMS 误差比较
200 150 100 50 0 10 20 30 40 t/s 50 60 70 80
+T
k
+
k
k/k 1 hi k k
k + k
1
(13) 式中
+
k =
k k
+
,
+ i
k =
k =
k k
.
修正的滤波误差协方差阵 k/k =
+
在 k 时刻对该目标进行双站测向交叉定位, 设第 i ( i = 1, 2) 个固定观测站提供的在同一坐标 系内的方位角测量方程表示为 Zi k = hi