现代控制理论课程设计心得【模版】
现代控制理论实训报告

一、前言随着科技的飞速发展,自动化、智能化已成为现代工业生产的重要特征。
为了更好地掌握现代控制理论,提高自己的实践能力,我参加了现代控制理论实训课程。
本次实训以状态空间法为基础,研究多输入-多输出、时变、非线性一类控制系统的分析与设计问题。
通过本次实训,我对现代控制理论有了更深入的了解,以下是对本次实训的总结。
二、实训目的1. 巩固现代控制理论基础知识,提高对控制系统的分析、设计和调试能力。
2. 熟悉现代控制理论在工程中的应用,培养解决实际问题的能力。
3. 提高团队合作意识,锻炼动手能力和沟通能力。
三、实训内容1. 状态空间法的基本概念:状态空间法是现代控制理论的核心内容,通过建立状态方程和输出方程,描述系统的动态特性。
2. 状态空间法的基本方法:包括状态空间方程的建立、状态转移矩阵的求解、可控性和可观测性分析、状态反馈和观测器设计等。
3. 控制系统的仿真与实现:利用MATLAB等仿真软件,对所设计的控制系统进行仿真,验证其性能。
4. 实际控制系统的分析:分析实际控制系统中的控制对象、控制器和被控量,设计合适的控制策略。
四、实训过程1. 理论学习:首先,我对现代控制理论的相关知识进行了复习,包括状态空间法、线性系统、非线性系统等。
2. 实验准备:根据实训要求,我选择了合适的实验设备和软件,包括MATLAB、控制系统实验箱等。
3. 实验操作:在实验过程中,我按照以下步骤进行操作:(1)根据实验要求,建立控制系统的状态空间方程。
(2)求解状态转移矩阵,并进行可控性和可观测性分析。
(3)设计状态反馈和观测器,优化控制系统性能。
(4)利用MATLAB进行仿真,观察控制系统动态特性。
(5)根据仿真结果,调整控制器参数,提高控制系统性能。
4. 结果分析:通过对仿真结果的分析,我对所设计的控制系统进行了评估,并总结经验教训。
五、实训成果1. 掌握了现代控制理论的基本概念和方法。
2. 提高了控制系统分析与设计能力,能够独立完成实际控制系统的设计。
“现代控制理论”课堂实践教学经验浅谈

资源共享课” 项 目支持 作者简介 : 郭强( 1 9 8 3 一 ) , 男, 内蒙古化德人 , 河南理工大学机 械与动力 工程学 院, 讲师; 闫艳燕( 1 9 7 9 一 ) , 女, 山东烟 台人 , 河南理工大学机
关键词 : 现代控制理论 ; 实践性 ; 反馈 ; 教学
中 图分 类号 : G 6 4 2 . 0 文 献 标 志码 : A
文章编号 : 1 6 7 4 — 9 3 2 4 ( 2 0 1 5 ) 1 6 — 0 2 1 2 — 0 2
当代大学生多 为“ 独生子女 ” , 在“ 养 尊处优 ” 的环 境中生活 了 1 0多年 , 他们 已经有 了抵制 困难 的倾 向 。 在机械学科 中 , “ 现代控制理论 ” l l I 是一 门控制 理论与
理解和接受 , 他们 愿意吗 ?” 至此肯定 能够形成 共鸣 。 此 时再 引入 “ 状态 空 间” 的概念 就可 以使他 们容 易接 受和理解 了。因此 , 在第一堂课采用 实例教学 和问题 教学刺激 学生的求知欲 , 为我们 后期的课程 开展开 了
个好头 。
数理论 ” 、 “ 矩 阵理论 ” 密切相关 , 并 且主要 以分 析计算
2 0 1 5 f i -4月 第 l 6期
教 育教 学论 坛
ED U CA TI ON TE AC HI NG F OR U卜 1
Apr. 201 5
N O. 16
“ 现代控制理论 ’ ’ 课堂实践教学经验浅谈
郭 强, 闫艳燕 , 张 燕, 高 国富 , 赵 波 ( 河南理工大学 机械与动力工程学 院 , 河南 焦作 4 5 4 0 0 0 )
使学 生在脑海 中形成解 答这些 问题 的渴求 , 进而 引出 控制 的概念 , 这样就能 激发他们继续深入 学习这 门功
现代控制理论 实验报告
实验三典型非线性环节一.实验要求1.了解和掌握典型非线性环节的原理。
2.用相平面法观察和分析典型非线性环节的输出特性。
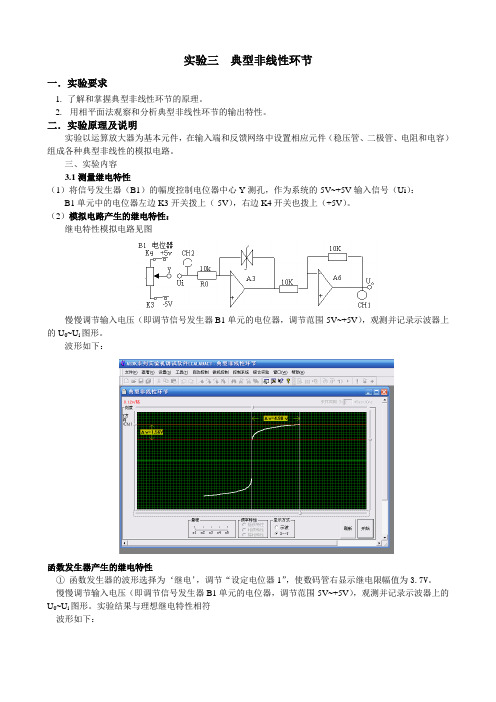
二.实验原理及说明实验以运算放大器为基本元件,在输入端和反馈网络中设置相应元件(稳压管、二极管、电阻和电容)组成各种典型非线性的模拟电路。
三、实验内容3.1测量继电特性(1)将信号发生器(B1)的幅度控制电位器中心Y测孔,作为系统的-5V~+5V输入信号(Ui):B1单元中的电位器左边K3开关拨上(-5V),右边K4开关也拨上(+5V)。
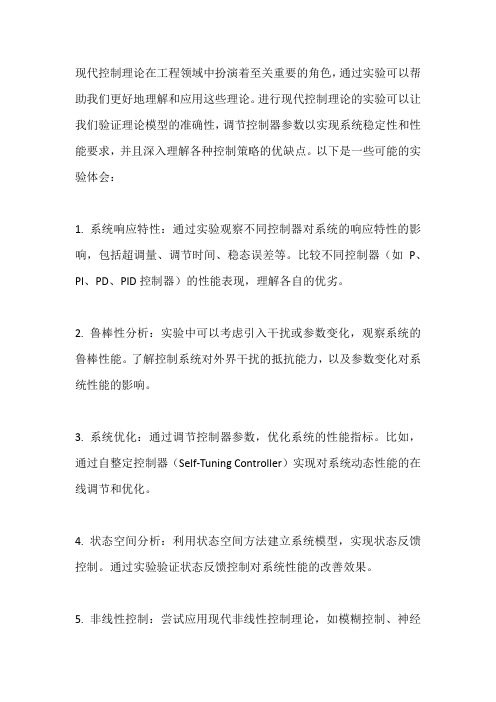
(2)模拟电路产生的继电特性:继电特性模拟电路见图慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
波形如下:函数发生器产生的继电特性①函数发生器的波形选择为‘继电’,调节“设定电位器1”,使数码管右显示继电限幅值为3.7V。
慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
实验结果与理想继电特性相符波形如下:3.2测量饱和特性将信号发生器(B1)的幅度控制电位器中心Y测孔,作为系统的-5V~+5V输入信号(Ui):B1单元中的电位器左边K3开关拨上(-5V),右边K4开关也拨上(+5V)。
(2)模拟电路产生的饱和特性:饱和特性模拟电路见图3-4-6。
慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
如下所示:函数发生器产生的饱和特性①函数发生器的波形选择为‘饱和’特性;调节“设定电位器1”,使数码管左显示斜率为2;调节“设定电位器2”,使数码管右显示限幅值为3.7V。
慢慢调节输入电压(即调节信号发生器B1单元的电位器,调节范围-5V~+5V),观测并记录示波器上的U0~U i图形。
波形如下:。
3.3测量死区特性模拟电路产生的死区特性死区特性模拟电路见图3-4-7。
现代控制理论课程报告

现代控制理论课程总结学习心得从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。
现代控制论是用状态空间方法表示,概念抽象,不易掌握。
对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。
但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。
由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。
而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。
当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。
在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。
作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。
经典控制理论的特点经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。
将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。
通常是采用反馈控制,构成所谓闭环控制系统。
现代控制理论实验体会
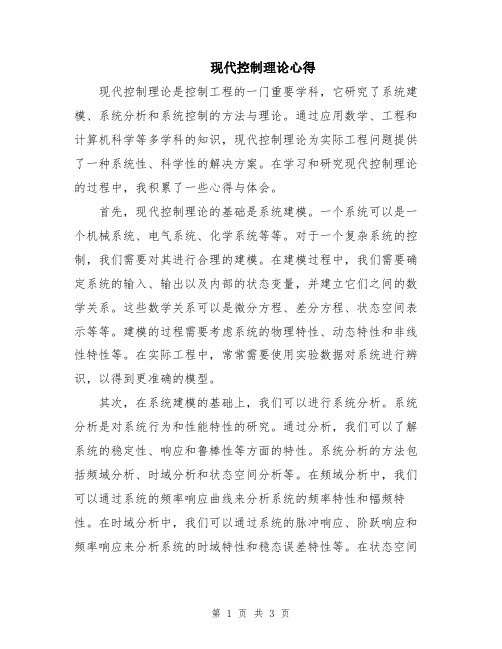
现代控制理论在工程领域中扮演着至关重要的角色,通过实验可以帮助我们更好地理解和应用这些理论。
进行现代控制理论的实验可以让我们验证理论模型的准确性,调节控制器参数以实现系统稳定性和性能要求,并且深入理解各种控制策略的优缺点。
以下是一些可能的实验体会:
1. 系统响应特性:通过实验观察不同控制器对系统的响应特性的影响,包括超调量、调节时间、稳态误差等。
比较不同控制器(如P、PI、PD、PID控制器)的性能表现,理解各自的优劣。
2. 鲁棒性分析:实验中可以考虑引入干扰或参数变化,观察系统的鲁棒性能。
了解控制系统对外界干扰的抵抗能力,以及参数变化对系统性能的影响。
3. 系统优化:通过调节控制器参数,优化系统的性能指标。
比如,通过自整定控制器(Self-Tuning Controller)实现对系统动态性能的在线调节和优化。
4. 状态空间分析:利用状态空间方法建立系统模型,实现状态反馈控制。
通过实验验证状态反馈控制对系统性能的改善效果。
5. 非线性控制:尝试应用现代非线性控制理论,如模糊控制、神经
网络控制等,对非线性系统进行控制。
观察非线性控制方法相比传统控制方法的优势。
通过实验,可以更深入地理解现代控制理论的原理和方法,掌握控制系统设计和调试的技巧,提升工程实践能力。
同时,实验也有助于培养工程师的创新思维和问题解决能力。
现代控制理论心得
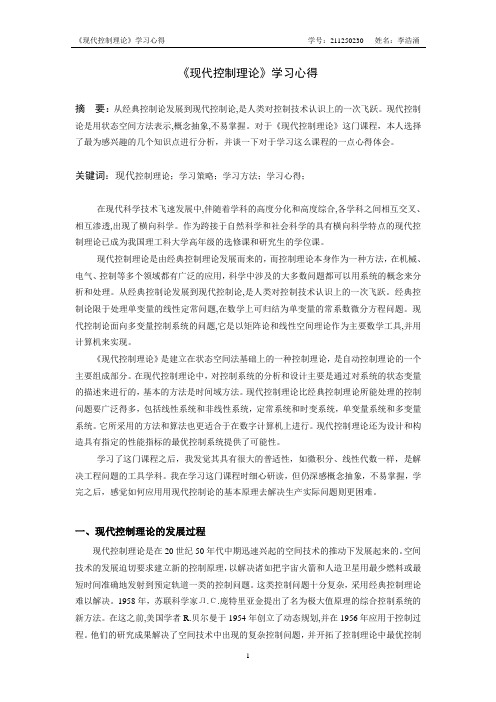
现代控制理论心得现代控制理论是控制工程的一门重要学科,它研究了系统建模、系统分析和系统控制的方法与理论。
通过应用数学、工程和计算机科学等多学科的知识,现代控制理论为实际工程问题提供了一种系统性、科学性的解决方案。
在学习和研究现代控制理论的过程中,我积累了一些心得与体会。
首先,现代控制理论的基础是系统建模。
一个系统可以是一个机械系统、电气系统、化学系统等等。
对于一个复杂系统的控制,我们需要对其进行合理的建模。
在建模过程中,我们需要确定系统的输入、输出以及内部的状态变量,并建立它们之间的数学关系。
这些数学关系可以是微分方程、差分方程、状态空间表示等等。
建模的过程需要考虑系统的物理特性、动态特性和非线性特性等。
在实际工程中,常常需要使用实验数据对系统进行辨识,以得到更准确的模型。
其次,在系统建模的基础上,我们可以进行系统分析。
系统分析是对系统行为和性能特性的研究。
通过分析,我们可以了解系统的稳定性、响应和鲁棒性等方面的特性。
系统分析的方法包括频域分析、时域分析和状态空间分析等。
在频域分析中,我们可以通过系统的频率响应曲线来分析系统的频率特性和幅频特性。
在时域分析中,我们可以通过系统的脉冲响应、阶跃响应和频率响应来分析系统的时域特性和稳态误差特性等。
在状态空间分析中,我们可以通过研究系统的状态方程和观测方程来分析系统的可控性、可观性和稳定性等。
最重要的是,现代控制理论提供了各种控制方法和算法。
在基本控制理论中,我们学习了比例控制、积分控制和微分控制三种基本控制方式。
比例控制通过调节误差的大小来控制系统的输出,积分控制通过积累误差来控制系统的输出,微分控制通过监测误差的变化率来控制系统的输出。
在现代控制理论中,我们还学习了状态反馈控制、输出反馈控制和模态控制等高级控制方法。
状态反馈控制利用系统状态信息来控制系统行为,输出反馈控制利用系统输出信息来控制系统行为,模态控制通过选取合适的模态来控制系统的行为。
此外,还有最优控制、鲁棒控制和自适应控制等高级控制方法。
李浩涌-现代控制理论课程学习心得
《现代控制理论》学习心得摘要:从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。
现代控制论是用状态空间方法表示,概念抽象,不易掌握。
对于《现代控制理论》这门课程,本人选择了最为感兴趣的几个知识点进行分析,并谈一下对于学习这么课程的一点心得体会。
关键词:现代控制理论;学习策略;学习方法;学习心得;在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。
作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的选修课和研究生的学位课。
现代控制理论是由经典控制理论发展而来的,而控制理论本身作为一种方法,在机械、电气、控制等多个领域都有广泛的应用,科学中涉及的大多数问题都可以用系统的概念来分析和处理。
从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。
经典控制论限于处理单变量的线性定常问题,在数学上可归结为单变量的常系数微分方程问题。
现代控制论面向多变量控制系统的问题,它是以矩阵论和线性空间理论作为主要数学工具,并用计算机来实现。
《现代控制理论》是建立在状态空间法基础上的一种控制理论,是自动控制理论的一个主要组成部分。
在现代控制理论中,对控制系统的分析和设计主要是通过对系统的状态变量的描述来进行的,基本的方法是时间域方法。
现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。
它所采用的方法和算法也更适合于在数字计算机上进行。
现代控制理论还为设计和构造具有指定的性能指标的最优控制系统提供了可能性。
学习了这门课程之后,我发觉其具有很大的普适性,如微积分、线性代数一样,是解决工程问题的工具学科。
我在学习这门课程时细心研读,但仍深感概念抽象,不易掌握,学完之后,感觉如何应用用现代控制论的基本原理去解决生产实际问题则更困难。
一、现代控制理论的发展过程现代控制理论是在20世纪50年代中期迅速兴起的空间技术的推动下发展起来的。
现代控制理论课程设计实验报告
现代控制理论课程设计实验报告现代控制理论课程设计系别机电⼯程系专业⾃动化⼀、题⽬:⼆、技术指标:三、设计内容第1章线性系统状态空间表达式建⽴1-1由开环系统的传递函数结构图建⽴系统的状态结构图。
1-2由状态结构图写出状态空间表达式。
第2章理论分析计算系统的性能2-1稳定性分析⽅法与结论。
2-2能控性与能观测性分析⽅法与结论。
第3章闭环系统的极点配置3-1极点配置与动态质量指标关系。
3-2极点配置的结果(闭环特征多项式)。
第4章由状态反馈实现极点配置4-1通过状态反馈可任意配置极点的条件。
4-2状态反馈增益阵的计算。
第5章⽤MATLAB编程研究状态空间表达式描述的线性系统5-1由传递函数结构图建⽴状态空间表达式。
5-2由状态空间表达式分析稳定性、能控性、能观测性。
5-3根据极点配置要求,确定反馈增益阵。
5-4求闭环系统阶跃响应特性,并检验质量指标。
第6章⽤模拟电路实现三阶线性系统6-1系统模拟电路图。
6-2各运算放⼤电路的电阻、电容值的确定。
6-3模拟实验结果及参数的修改。
课程设计⼩结1、收获。
2、经验教训与建议。
⼀、⽬的要求⽬的:1、通过课程设计,加深理解现代控制理论中的⼀些基本概念;2、掌握⽤状态⽅程描述的线性系统的稳定性、能控性、能观性的分析计算⽅法;3、掌握对线性系统能进⾏任意极点配置来表达动态质量要求的条件,并运⽤状态反馈设计⽅法来计算反馈增益矩阵和⽤模拟电路来实现。
达到理论联系实际,提⾼动⼿能⼒。
要求:1、在思想上重视课程设计,集中精⼒,全⾝⼼投⼊,按时完成个阶段设计任务。
2、重视理论计算和MATLAB 编程计算,提⾼计算机编程计算能⼒。
3、认真写课程设计报告,总结经验教训。
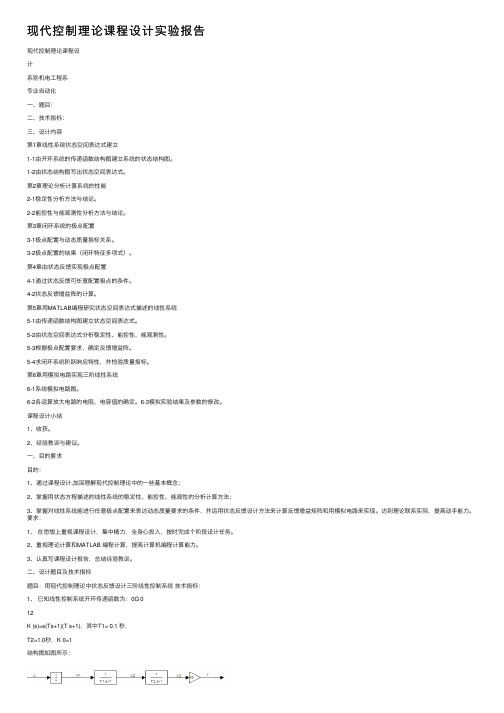
⼆、设计题⽬及技术指标题⽬:⽤现代控制理论中状态反馈设计三阶线性控制系统技术指标:1、已知线性控制系统开环传递函数为:0G 012K (s)=s(Ts+1)(T s+1),其中T1= 0.1 秒,T2=1.0秒,K 0=1结构图如图所⽰:2、质量指标要求:% =4.32% ,p t =1秒,ss e =0 ,ssv e = 0.1三、设计报告正⽂第1章线性系统状态空间表达式建⽴1-1由开环系统的传递函数结构图建⽴系统的状态结构图由系统结构图可得变换后的系统结构图如下:1-2由状态结构图写出状态空间表达式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
宁波理工学院现代控制理论课程设计报告
题目打印机皮带驱动系统能控能观和稳定性分析项目成员史旭东童振梁沈晓楠
专业班级自动化112
指导教师何小其
分院信息分院
完成日期 2014-5-28
目录
1. 课程设计目的 (4)
2.课程设计题目描述和要求 (4)
3.课程设计报告内容 (4)
3.1 原理图 (4)
3.2 系统参数取值情况 (5)
3.3 打印机皮带驱动系统的状态空间方程 (5)
4. 系统分析 (8)
4.1 能控性分析 (8)
4.2 能观性分析 (8)
4.3 稳定性分析 (9)
5. 总结 (11)
项目组成员具体分工
打印机皮带驱动系统能控能观和稳定性
分析
课程设计的内容如下:
1.课程设计目的
综合运用自控现代理论分析皮带驱动系统的能控性、能观性以及稳定性,融会贯通并扩展有关方面的知识。
加强大家对专业理论知识的理解和实际运用。
培养学生熟练运用有关的仿真软件及分析,解决实际问题的能力,学会应用标准、手册、查阅有关技术资料。
加强了大家的自学能力,为大家以后做毕业设计做很好的铺垫。
2.课程设计题目描述和要求
(1)环节项目名称:能控能观判据及稳定性判据
(2)环节目的:
①利用MATLAB分析线性定常系统的可控性和客观性。
②利用MATLAB进行线性定常系统的李雅普诺夫稳定性判据。
(3)环节形式:课后上机仿真
(4)环节考核方式:
根据提交的仿真结果及分析报告确定成绩。
(5)环节内容、方法:
①给定系统状态空间方程,对系统进行可控性、可观性分析。
②已知系统状态空间方程,判断其稳定性,并绘制出时间响应曲线验
证上述判断。
3.课程设计报告内容
3.1 原理图
在计算机外围设备中,常用的低价位喷墨式或针式打印机都配有皮带驱动器。
它用于驱动打印头沿打印页面横向移动。
图1给出了一个装有直流电机的皮
带驱动式打印机的例子。
其光传感器用来测定打印头的位置,皮带张力的变化用于调节皮带的实际弹性状态。
图1 打印机皮带驱动系统
3.2 系统参数取值情况
表1打印装置的参数
3.3 打印机皮带驱动系统的状态空间方程
图2 打印机皮带驱动模型
状态空间建模及系统参数选择。
图2为打印机皮带驱动器的基本模型。
模型中记皮带弹性系数为k,滑轮半径为r,电机轴转角为θ,右滑轮的转角为θP,打印头质量为m,打印头的位移为y(t)。
光传感器用来测量y(t),光传感器的输出电压为v1,且v1=k1y。
控制器输出电压为v2,对系统进行速度反馈,即有v2=k2dv1/dt。
注意到y=rθp,可知皮带张力T1,T2分别为
于是作用在质量m上的皮带净张力为T1-T2=2k(rθ-y)=2kx1,其中x1=(rθ-y)为第一个状态变量,表示打印头实际位移y与预期位移rθ之间的位移差。
则质量m的运动方程为
取第二个状态变量x2=dy/dt,于是有
定义第三个状态变量x3=dθ/dt,x1的导数
推导电机旋转的运动方程:当L=0时,电机电枢电流i=v2/r,而电机转矩为M m=K m i,于是有:
设作用在驱动皮带上的扰动转矩为Md,则电机驱动皮带的有效转矩为M=Mm-Md。
显然,只有有效转矩驱动电机轴带动滑轮运动,因此有
由于
故得
在上式中代入(1-3)以及
得到
最后可得
式(1-1)、(1-2)、(1-3)构成了描述打印机皮带驱动系统的一阶运动微分方程组,其向量矩阵形式为
将表1打印装置的参数代入得
4. 系统分析
4.1 能控性分析
根据能控性的秩判据
经计算可控性判别阵为
由上可知,rank(Sc)=3=rank(A),故系统能控。
4.2 能观性分析
根据能观性的秩判据
经计算可观测性判别阵为
由上可知,rank(S0)=3=rank(A),故系统能观。
4.3 稳定性分析
由打印机皮带驱动器系统的状态方程,可利用MATLAB求出其特征值:
代码:
A=[0 -1 0.015;200 0 0;-60 -8 -25];
Q=eye(3);
p=lyap(A',Q) val=eig(A)
结果:p =
1.0e+004 *
-6.0523 -0.0008 -0.0028
-0.0008 -0.0303 0.0001
-0.0028 0.0001 0.0000
val =
0.0009 +14.1755i
0.0009 -14.1755i
-25.0018
解的特征值为0.0090+14.4724i,0.0090-14.4724i,-25.0180。
三个特征值中存在两个正实部根,一个负根,这说明打印机皮带驱动器系统,即被控系统是不稳定的。
采用MATLAB对被控对象进行仿真,如下图所示为打印机皮带驱动器没有添加任何控制器下三个变量的单位阶跃响应。
如图可知,系统不稳定,不能到达控制目的。
代码:
A=[0 -1 0.015;200 0 0;-60 -8 -25]; b=[0;0;-100];
c=[1,0,0];
d=0;
sys0=ss(A,b,c,d);
t=0:0.01:5;
[y,t,x]=step(sys0,t);
subplot(2,2,1);
plot(t,x(:,1));grid
xlabel('t(s)');ylabel('x(t)');
title('z');
subplot(2,2,2);
plot(t,x(:,2));grid;
xlabel('t(s)');ylabel('x(t)');
title('z的微分');
subplot(2,2,3);
plot(t,x(:,3));grid
xlabel('t(s)');ylabel('x(t)');
title('\theta')
仿真结果如下:
5.总结
本次实验以打印机皮带和打印头为研究对象,讨论了将极点配置在期望的区域内的状态反馈控制方法。
从仿真的结果可以看出,该方法可以保证系统具有一定的动态特性要求,夜间鼓励抑制外部扰动对系统的影响。
由此可知,极点配置控制方法可以实现打印机皮带驱动系统平衡控制。
从实验的研究结果还可看出,打印机皮带驱动系统是研究各种控制理论的一个不错的实验装置。
参考书目:
[1]薛定宇,控制系统计算机辅助设计,清华大学出版社,2012年。
[2]胡寿松,自动控制原理简明教程,科学出版社,2005年。
[3]方水良,现代控制理论及其MA TAB实践,2005年。
[4]王晓凯,基于简化模型的倒立摆控制实验研究[J],计算机技术与自动化,1997年。
[5]王海英,袁丽英,吴勃.控制系统的MATLAB仿真与设计(第1版) [M],高等教育出版社.2009年。
[6]刘卫国,MATLAB程序设计与应用(第二版),2006
附录
源代码:
A=[0 -1 0.015;200 0 0;-60 -8 -25];
b=[0;0;-100];
c=[1,0,0];
d=0;
sys0=ss(A,b,c,d);
t=0:0.01:5;
[y,t,x]=step(sys0,t);
subplot(2,2,1);
plot(t,x(:,1));grid
xlabel('t(s)');ylabel('x(t)');
title('z');
subplot(2,2,2);
plot(t,x(:,2));grid;
xlabel('t(s)');ylabel('x(t)');
title('z的微分');
subplot(2,2,3);
plot(t,x(:,3));grid
xlabel('t(s)');ylabel('x(t)');
title('\theta')。